Aktuator, insbesondere Radaktuator mit einem Abtrieb
Die Erfindung betrifft einen Aktuator (1), insbesondere einen Radaktuator für ein steer-by-wire-Lenksystem eines Fahrzeugs. Ein oder mehrere Elektromotoren (2) treiben über ein Untersetzungsgetriebe (7) einen Drehschieber (11) oder eine Steuerbuchse (12) eines hydraulischen Stellventils (3) an. Das hydraulische Stellventil (3) misst Arbeitsräumen (25, 26) eines Servozylinders (4) des Aktuators (1) Druckmittel zu. Um den Bauraum des Aktuators (1) zu minimieren und Stellkräfte zu ermöglichen, die geeignet sind, den Aktuator (1) für ein Lenksystem für schwere PKW und Nutzkraftwagen einzusetzen, ist vorgesehen, das Untersetzungsgetriebe (7) zumindest zweistufig zu gestalten, wobei ein Zwischenrad (8) als erste Getriebestufe (9) zwischen einem Ritzel (24) des Elektromotors und einem Rad (10) dient. Das Rad (10) ist drehfest mit dem Drehschieber (11) oder der Steuerbuchse (12) des hydraulischen Stellventils (3) verbunden.
[0001] Die Erfindung betrifft einen Aktuator, insbesondere einen Radaktuator mit einem Abtriebfür ein steer-by-wire-Lenksystem eines Fahrzeugs, nach dem Oberbegriff des Anspruchs 1.
Stand der Technik
[0002] Die DE 195 41 749 C1 beschreibt einen Aktuator für ein Lenksystem, bei dem die mechanischeZwangskoppelung zwischen einer Lenkhandhabe und gelenkten Rädern eines Fahrzeugs aufgehoben ist.Hierbei wird ein vorzugsweise als Elektromotor ausgebildeter Stellmotor von einer Regeleinrichtungangesteuert. Der Stellmotor dient zur Ansteuerung eines Stellventils eines Servozylinders zur Lenkverstellunggelenkter Räder und wirkt auch direkt auf ein als Zahnstangentrieb ausgebildetes Lenkgetriebe.Der Aktuator weist somit stets zwei Abtriebe auf und ist mit einem Lenkgetriebe verknüpft.
[0003] Die DE 100 60 832 A1 beschreibt einen Aktuator einer Fremdkraftlenkung nach dem steer-by-wire-Prinzip, miteinem Elektromotor zum Antrieb eines hydraulischen Stellventils für einen Servozylinder desAktuators. Der Elektromotor ist so dimensioniert, dass er die Stellbewegung über ein Untersetzungsgetriebe,welches den Drehmomentenstrang über das hydraulische Stellventil zu einer Bewegungsschraubedarstellt, bei Ausfall des Servozylinders alleine bewältigen kann. Der Aktuator wirkt über einenAbtrieb auf die gelenkten Räder. Sein Bauraum ist aufgrund des einstufigen Untersetzungsgetriebesnicht minimiert. Zudem eignet sich der Aktuator weniger für Lenksysteme von schweren Fahrzeugen.
[0004] Der Erfindung liegt die Aufgabe zugrunde, einen Aktuator der eingangs genannten Art zuschaffen, der bei minimiertem Bauraumbedarf sich für Lenksysteme schwerer PKW und Nutzkraftwageneignet.
[0005] Die Aufgabe wird mit einem Aktuator mit den Merkmalen des Anspruchs 1 gelöst.
[0006] Dadurch, dass ein Untersetzungsgetriebe den Drehmomentenstrang zwischen dem Elektromotorund dem Abtrieb des Aktuators bildet, welches zumindest zweistufig ist, ist eine schmale Bauformdes Aktuators ermöglicht. Ein Zwischenrad zwischen einem Ritzel des Elektromotors und einem Rad,weiches drehfest mit einem Drehschieber oder einer Steuerbuchse des hydraulischen Stellventilsverbunden ist, dient als erste Getriebestufe des Untersetzungsgetriebes. In einer bevorzugtenAusführungsform des Aktuators treibt das von dem Zwischenrad angetriebene Rad den Drehschieberdes hydraulischen Stellventils an. Der Drehschieber ist drehfest mit dem als Schnecke ausgebildeten,axial unbeweglichen und die Drehbewegung in eine Translationsbewegung umformenden Bauelementes derBewegungsschraube wirkverbunden. Die Längsachsen der Schnecke und des Drehschiebers sind bevorzugtkongruent.
[0007] Bevorzugte Ausführungen der Erfindung ergeben sich aus den Unteransprüchen.
[0008] Die Schnecke durchragt eine Mutter und treibt diese in axialer Richtung zur Durchführung einerStellbewegung des Abtriebs des Aktuators an. Als Abtrieb dient bevorzugt eine Stange oder Kolbenstangean der Mutter. Um den Aktuator besonders kompakt zu gestalten, ist vorgesehen, die Mutter alsKolben des Servozylinders auszubilden. Dabei nimmt die als Abtrieb des Aktuators dienende Kolbenstangedie Schnecke auf. Das Untersetzungsgetriebe kann auch mehr als zwei Stufen aufweisen und istbevorzugt als Stirnradgetriebe ausgebildet. Es kann auch als Keilriemen-, Keilrippenriemen-,oder Zahnriemengetriebe oder in anderer Form als Zugmittelgetriebe ausgeführt sein.
[0009] Die Bewegungsschraube kann auch durch einen Kugelumlauftrieb dargestellt sein. Durchdie Anordnung des hydraulischen Stellventils im Kraftfluss zwischen dem Elektromotor und derBewegungsschraube regelt das Stellventil automatisch den Druckmittelzu- und Abfluss an dem Servozylinder.
[0010] Aus Redundanzgründen oder um den Bauraum des Aktuators an Erfordernisse bei der Montage anzupassen,kann es zweckmäßig sein, zwei oder mehrere Elektromotoren vorzusehen oder die elektrische Antriebsleistungauf zwei oder mehrere Elektromotoren zu verteilen.
[0011] Der Servozylinder des Aktuators lässt sich in Stellkraft und Stellgeschwindigkeit andie Erfordernisse oder die Größe des Fahrzeugs anpassen. Der Servozylinder kann auch in Abhängigkeitvon der Einbausituation getrennt von dem Aktuator angeordnet sein.
[0012] Das Untersetzungsgetriebe ist in seiner Übersetzung ins Langsame so gewählt, dass beiAusfall des Servozylinders durch die Elektromotoren eine Funktion des Aktuators gewährleistet ist und diegesetzlich vorgeschriebene Mindestlenkleistung für das jeweilige Fahrzeug durch den Aktuatorerbringbar ist.
[0013] Zur Verdrehsicherung des Kolbens oder der Mutter und der Kolbenstange können verschiedenekonstruktive Maßnahmen getroffen werden. Es kann zweckmäßig sein, die Lauffläche des Servozylindersund den Kolben mit einer von der Kreisform abweichenden Querschnittsform auszustatten. Die Mutterkann in einer Linearführung geführt sein oder die Linearführung kann durch eine Stange erfolgen,die die Mutter in einer Bohrung durchgreift, wobei die Längsachse der Stange von der Längsachse derMutter versetzt ist. Die Kolbenstange, die den Abtrieb des Aktuators bildet, kann über ein Gelenkoder Kreuzgelenk abgestützt sein.
[0014] Die Erfindung wird nun näher anhand eines Ausführungsbeispieles beschrieben und anhandder beiliegenden Zeichnung wiedergegeben.
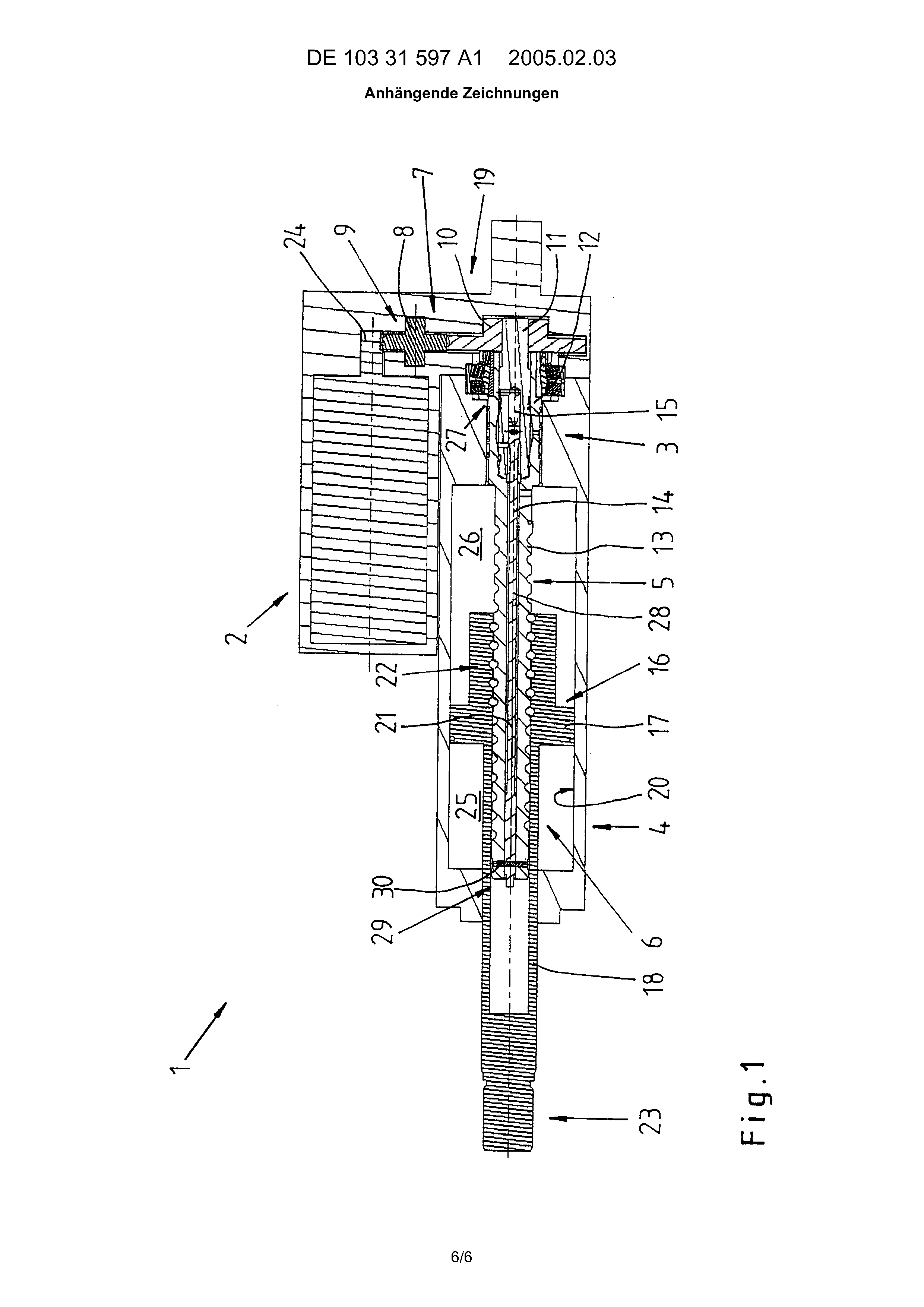
[0015] Fig. 1 zeigt einen schematischen Längsschnitt durch einen erfindungsgemäßen Aktuator
[0016] In der Fig. 1 ist ein als Radaktuator für ein steer-by-wire-Lenksystem eines Fahrzeugsausgebildeter Aktuator 1 im Längsschnitt schematisch dargestellt.
[0017] Durch die Betätigung einer nicht gezeigten Lenkhandhabe des Fahrzeugs wird ein Sollwert fürden gewünschten Lenkwinkel der gelenkten Räder des Fahrzeugs generiert. Eine Regel- und/oderSteuereinrichtung vergleicht den Sollwert mit einem Ist-Wert des Lenkwinkels und steuert einen Elektromotor2 an. Der Elektromotor 2 stellt ein Motormoment über ein Ritzel 24 an ein Untersetzungsgetriebe7 bereit. Das Untersetzungsgetriebe 7 ist zur Minimierung, insbesondere der Breite des Aktuators1 zweistufig, als Stirnradgetriebe 19 mit einem Zwischenrad 8 als erste Getriebestufe 9 gebildet. DasZwischenrad 8 reduziert die Drehzahl des Elektromotors 2 um ein Vielfaches und treibt ein Rad10 an. Das Rad 10 ist drehfest mit einem Drehschieber 11 eines hydraulischen Stellventils 3im Gehäuse des Aktuators 1 verbunden. Der Drehschieber 11 wirkt in bekannter Weise mit einerden Drehschieber 11 umschließenden Steuerbuchse 12 des hydraulischen Stellventils 3 zusammenund steuert einen Druckmittelfluss zu Arbeitsräumen 25, 26 eines Servozylinders 4. Die Arbeitsräume25, 26 liegen sich, durch einen Kolben 17 in dem Servozylinder 4 getrennt, gegenüber.
[0018] Der Drehschieber 11 ist an einem, dem Untersetzungsgetriebe 7 zugewandt liegenden Ende27 eines axial unbeweglichen, eine Drehbewegung in eine Translationsbewegung umformenden Bauelementes5 einer Bewegungsschraube 6 angeordnet. Die Bewegungsschraube 6 dient zusammen mit dem Kolben17, dessen Kolbenstange 18 und dem Servozylinder 4 zur Darstellung einer linearen Stellbewegungdes einzigen Abtriebs 23 - der Kolbenstange 18 - des Aktuators.
[0019] Das Bauelement 5 ist als Schnecke 13 gebildet und durchragt den in Richtung auf den Drehschieber11 abgestuft gebildeten Kolben 17. Der Kolben 17 bildet zugleich eine Mutter oder Kugelumlaufmutter16 eines Kugelumlaufs 22 der Bewegungsschraube 6. Die Längsachse 14 der Schnecke 13 ist somitkongruent zu der Längsachse 15 des Drehschiebers 11. Die Schnecke 13 erstreckt sich etwa über diegesamte Länge des Servozylinders 4 und ist in der Kolbenstange 18 geführt.
[0020] Der Drehschieber 11 ist mit einem Drehstab 28, welcher im Inneren der Schnecke 13 überderen gesamte Länge angeordnet ist, mit der Schnecke 13 verbunden. Der Drehstab 28 ist zu diesemZweck an seinem, dem Drehschieber 11 abgewandten Ende 29 mit einem Bolzen 30 mit der Schnecke13 verbunden. Die Schnecke 13 ist wiederum einstückig mit der Steuerbuchse 12 des hydraulischenStellventils 13 gebildet. Wird der Drehschieber 11 durch die drehelastische Verbindung über demDrehstab 28 mit der Steuerbuchse 12 relativ zu der Steuerbuchse 12 verdreht, so verursacht dashydraulische Stellventil 3 eine Druckdifferenz von Druckmittel in den Arbeitsräumen 25, 26 des Servozylinders4, mit der Folge, dass eine Stellkraft auf den Kolben 17 mit der Kolbenstange 18 in die eine oderandere Richtung erzeugt wird. Die Stellkraft der Bewegungsschraube 6 und des Servozylinders4 werden somit addiert und können an der Kolbenstange 18 abgegriffen werden. Da das hydraulische Stellventil3 nach den Getriebeübersetzungen des Untersetzungsgetriebes 7 angeordnet ist, ist die Anzahlder in Betrieb durch den Drehschieber 11 durchgeführten Umdrehungen, als auch die Drehzahl gering.Die Dichtungen am Außendurchmesser der Steuerbuchse 12 sind dadurch nicht sehr stark belastet.
[0021] Zur Verdrehsicherung des Kolbens 17 oder der Mutter 16 ist eine Linearführung in demServozylinder 4 vorgesehen, wobei die Lauffläche 4 und der Kolben 17 eine von der Kreisformabweichende Querschnittsform aufweisen. Die Gesamtübersetzung von dem Ritzel 24 bis zu der Bewegungsschraube6 ist so ausgelegt, dass bei Ausfall der hydraulischen Unterstützung des Servozylinders 4 dieNotlenkeigenschaften des steer-by-wire-Lenksystems aufrechterhalten bleiben.
[0022] Zur Erfassung der Stellung der Kolbenstange 18 und zur Ermittlung eines Ist-Lenkwinkels wirdvon der Steuer- und/oder Regelungseinrichtung die Stellung des Ritzels 24, des Zwischenrades8 und die Drehschieberposition erfasst.
[0023] Der Aktuator 1 lässt sich auch als hydraulisch unterstützter Linearsteller für allgemeine Stellzylinderanwendungennutzen.BEZUGSZEICHENLISTE
1. Aktuator, insbesondere Radaktuator für ein steer-by-wire-Lenksystem eines Fahrzeugs, miteinem Elektromotor (2) zum Antrieb eines hydraulischen Stellventils (3) für einen Servozylinder(4) des Aktuators (1) und zum Antrieb eines axial unbeweglichen, eine Drehbewegung in eine Translationsbewegungumformenden Bauelementes (5) einer Bewegungsschraube (6) des Aktuators (1), wobei ein Untersetzungsgetriebe(7) in dem Drehmomentenstrang zwischen dem Elektromotor (2), dem hydraulischen Stellventil (3)und der Bewe-gungsschraube (6) angeordnet ist, dadurch gekennzeichnet, dass das Untersetzungsgetriebe (7)zumindest zweistufig gebildet ist, wobei ein Zwischenrad (8) als erste Getriebestufe (9) dientund das Zwischenrad (8) ein Rad (10), welches drehfest mit einem Drehschieber (11) oder einerSteuerbuchse (12) des hydraulischen Stellventils (3) verbunden ist, antreibt.
2. Aktuator nach Anspruch 1, dadurch gekennzeichnet, dass das Rad (10) den Drehschieber (11)des hydraulischen Stellventils (3) antreibt, und der Drehschieber (11) rotatorisch mit dem axialunbeweglichen Bauelement (5) der Bewegungsschraube (6) wirkverbunden ist.
3. Aktuator nach Anspruch 2, dadurch gekennzeichnet, dass das axial unbewegliche Bauelement(5) der Bewegungsschraube (6) eine Schnecke (13) ist, deren Längsachse (14) kongruent zu derLängsachse (15) des Drehschiebers (11) ist und die Schnecke (13) eine Mutter (16) zur Durchführungeiner axialen Stellbewegung des Aktuators (1) durchragt.
4. Aktuator nach Anspruch 3, dadurch gekennzeichnet, dass die Mutter (16) ein Kolben (17)mit Kolbenstange (18) des Servozylinders (4) bildet.
5. Aktuator nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass das Untersetzungsgetriebe(7) als Stirnradgetriebe (19), als Keilriemen-, Keilrippenriemen-, oder Zahnriemengetriebe ausgebildetist.
6. Aktuator nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass zwei oder mehrereElektromotoren (2) zum Antrieb des hydraulischen Stellventils (3) und des axial unbeweglichen Bauelementes(5) der Bewegungsschraube (6) vorgesehen sind.
7. Aktuator nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass der Servozylinder(4) getrennt zu der Bewegungsschraube (6) des Aktuators (1) angeordnet ist.
8. Aktuator nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass der Servozylinder(4) an die Größe des Fahrzeugs angepasst ist.
9. Aktuator nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, dass das Untersetzungsgetriebe(7) so übersetzt ist, dass bei Ausfall des Servozylinders (4) der Elektromotor (2) eine Funktiondes Aktuators (1) oder des Lenksystems des Fahrzeugs aufrecht erhalten kann.
10. Aktuator nach einem der Ansprüche 4 bis 9, dadurch gekennzeichnet, dass die Lauffläche (20)des Servozylinders (4) und der Kolben (17) eine von der Kreisform abweichende Querschnittsformaufweisen.
11. Aktuator nach einem der Ansprüche 4 bis 10, dadurch gekennzeichnet, dass zur Verdrehsicherungder Mutter (16) eine Linearführung aus einer von der Längsachse (21) der Mutter (16) versetztangeordnete Stange, die durch eine Bohrung der Mutter (16) ragt, vorgesehen ist.
12. Aktuator nach einem der Ansprüche 4 bis 11, dadurch gekennzeichnet, dass zur Verdrehsicherungder Mutter (16) die Kolbenstange (18) über ein Gelenk oder ein Kreuzgelenk abgestützt ist.
13. Aktuator nach einem der Ansprüche 3 bis 12, dadurch gekennzeichnet, dass die Schnecke(13) und die Mutter (16) über einen Kugelumlauf (22) wirkverbunden sind und der Aktuator (1) eineneinseitigen Abtrieb (23) aufweist.
14. Lenksystem mit einem Aktuator und mit einem Elektromotor (2) zum Antrieb eines hydraulischenStellventils (3) für einen Servozylinder (4) des Aktuators (1) und zum Antrieb eines axial unbeweglichen,eine Drehbewegung in eine Translationsbewegung umformenden Bauelementes (5) einer Bewegungsschraube(6) des Aktuators (1), wobei ein Untersetzungsgetriebe (7) in dem Drehmomentenstrang zwischendem Elektromotor (2), dem hydraulischen Stellventil (3) und der Bewegungsschraube (6) angeordnetist, dadurch gekennzeichnet, dass das Untersetzungsgetriebe (7) zumindest zweistufig gebildetist, wobei ein Zwischenrad (8) als erste Getriebestufe (9) dient und das Zwischenrad (8) einRad (10), welches drehfest mit einem Drehschieber (11) oder einer Steuerbuchse (12) des hydraulischenStellventils (3) verbunden ist, antreibt.
Es folgt ein Blatt Zeichnungen