Mechanical-electronic position indicator has microcontroller that detects potentiometer slider voltage, has digital output connected via converter to output stage, outputs watchdog signals to monitoring stages controlling supply voltage
The device has a potentiometer (R1) operated by an actuating rod (8), a microcontroller (16), an output stage (18) and a d.c. power supply (14). The microcontroller detects the potentiometer slider voltage as a digital value and has a digital output connected via a digital-to-analog converter to the output stage and outputs first and second watchdog signals to watchdog monitoring stages controlling the supply voltage.
[0001] Die Erfindung betrifft einen mechanisch-elektronischen Positionsgeber nach dem Oberbegriffvon Anspruch 1.
Stand der Technik
[0002] Aus der Druckschrift DE 199 62 241 A1 ist ein mechanisch-elektronischer Positionsgeber bekannt,der aus einem Winkelgeber in Form eines Zahngetriebes, von diesem angetriebene Magnetimpulsgeber,einem Analog-Digitalwandler (im Folgenden AD-wandler genannt), einem Mikroprozessor und einerAusgangsstufe mit wahlweise digitaler oder analoger Ausganggröße besteht.
[0003] Ein mechanisch-elektronischer Positionsschalter ist aus der Gebrauchsmusterschrift DE202 03 214 U1 bekannt. In einem Gehäuse sind ein Betätigungsstößel, ein Potentiometer, ein Mikrocontrollerund elektronische Schaltkontakte angeordnet. Der Betätigungsstößel ist mit dem Schleifer desPotentiometers gekoppelt. Bei Stößelbetätigung wird dem Mikrocontroller ein sich änderndes elektrischesSignal zugeführt, das beim Über- bzw. Unterschreiten eines programmierten Schwellenwertes eineZustandsänderung der Schaltkontakte bewirkt. Die Schaltkontakte sind ausgangsseitig mit denAnschlussklemmen verbunden. Es werden keine Angaben darüber gemacht, wie Ausfälle der Elektronikerkannt werden können um zu verhindern, dass fehlerhafte Ausgangssignale zu Fehlsteuerungen ander Peripherie des Positionsschalters führen.
[0004] Aus der US 5 426 776 A ist eine Watchdog-Überwachungsschaltung bekannt, die dazu dient,einen Mikroprozessor auf die Abarbeitung seines Programms zu überwachen. Die Überwachungsschaltung beinhalteteinen Spannungskomparator der eingangsseitig mit einem aus einer ersten Widerstands-Kondensator-Reihenkombinationbestehenden Ladungsspeicher verbunden ist und ausgangsseitig an einen Reset-Eingang des Mikroprozessorsgeführt ist. Eine aus einer zweiten Widerstands-Kondensator-Reihenkombination und einem zu einemVersorgungspotenzial führenden ersten Halbleiterventil bestehende Ladungspumpe ist mit einemzweiten Halbleiterventil mit dem Ladungsspeicher verbunden. Bei regelmäßiger Arbeitsweise liefert einWatchdog-Ausgang des Mikroprozessors ein dynamisch wechselndes Watchdog-Signal an die Ladungspumpe,die durch regelmäßige Entladung die Ladespannung des Ladungsspeichers unterhalb eines Schwellwertes hält.Mit Aussetzen des Mikroprozessors endet der dynamische Wechsel des Watchdog-Signals und damitdas Entladen des Ladungsspeichers über die Ladungspumpe, worauf durch die den Schwellwert übersteigende Ladespannungein Reset-Signal vom Komparator ausgegeben wird.
Aufgabenstellung
[0005] Der Erfindung liegt daher als Aufgabe ein sich selbst überwachender mechanisch-elektronischer Positionsgeberzugrunde.
[0006] Ausgehend von einem mechanisch-elektronischen Positionsgeber der eingangs genannten Artwird die Aufgabe erfindungsgemäß durch die Merkmale des unabhängigen Anspruches gelöst, währendden abhängigen Ansprüchen vorteilhafte Weiterbildungen der Erfindung zu entnehmen sind.
[0007] Die Überwachungsstufen dienen in Verbindung mit den Watchdog-Signalen grundsätzlich dazu, denMikrocontroller auf ein Aussetzen zu überwachen und im Falle des Aussetzens durch Sperren derVersorgungsspannung die weitere Ausgabe eines von der Stößelposition entsprechenden Ausgangssignalszu unterbinden. Durch das Zusammenwirken der Überwachungsstufen mit regelmäßig aussetzenden Watchdog-Signalenwerden die Überwachungsstufen ihrerseits regelmäßig daraufhin getestet, ob sie noch in der Lagesind, funktionsgerecht auf ein Aussetzen der Watchdog-Signale zu reagieren. Durch ausgangsseitigeRückführung der Überwachungsstufen an Rückleseeingänge wird bei fehlschlagendem Test mit bleibenderAussetzung der Watchdog-Signale die weitere Ausgabe eines der Stößelposition entsprechendenAusgangssignals unterbunden. Die parallele Überwachung von Watchdog-Signalen mit gegenseitigversetzten Aussetzintervallen über die zwei gleichartigen Überwachungsstufen sorgen in Verbindungmit zwei einseitig verbundenen Dioden bei störungsfreiem Betrieb des Mikrocontrollers für einekontinuierliche Strom- bzw. Spannungsversorgung der Ausgangsstufe und damit für ein unterbrechungsfreiesAusgangssignal.
[0008] Eine vorteilhafte Weiterbildung durch eine zwischen den Dioden und der Ausgangstufe angeordneteSpannungsversorgungsstufe liefert eine von Schwankungen der von außen gelieferten Versorgungsspannungweitgehend unabhängige Spannungsversorgung der Ausgangsstufe. Eine strombegrenzende Spannungsversorgungsstufeist hierbei zum Schutz vor ausgangsseitigen Überlastungen der Ausgangsstufe von Vorteil. Eineweitergehende vorteilhafte Ausgestaltung besteht darin, dass die ausgangsseitige Rückführungeiner der Überwachungsschaltungen konjunktiv verknüpft mit einer Funktionsabfrage der Spannungsversorgungsstufeerfolgt, sodass auch bei unzureichender Spannungsversorgung der Ausgangsstufe, beispielsweiseinfolge einer Überlastung oder eines Kurzschlusses am Ausgang der Ausgangsstufe, die weitere Ausgabeeines von der Stößelposition entsprechenden Ausgangssignals unterbunden wird.
[0009] Eine vorteilhafte Weiterbildung besteht darin, dass von einer der Überwachungsschaltungen ausgangsseitig ein binäres Kontrollsignal abgegriffenwird, das nach außen die Gültigkeit bzw. Nichtgültigkeit des analogen Ausgangssignals signalisiert.
[0010] In vorteilhafter Weiterbildung zur Anzeige fehlerhafter Betriebszustände ist ein Meldeausgangdes Mikrocontrollers mit einem optischen Signalelement verbunden.
[0011] Zweckmäßigerweise werden die Aussetzungsintervalle im Abstand von einigen Sekunden wiederholt.
Ausführungsbeispiel
[0012] Weitere Einzelheiten und Vorteile der Erfindung ergeben sich aus dem folgenden, anhandeiner Zeichnung erläuterten Ausführungsbeispiel. Dabei zeigt die einzige
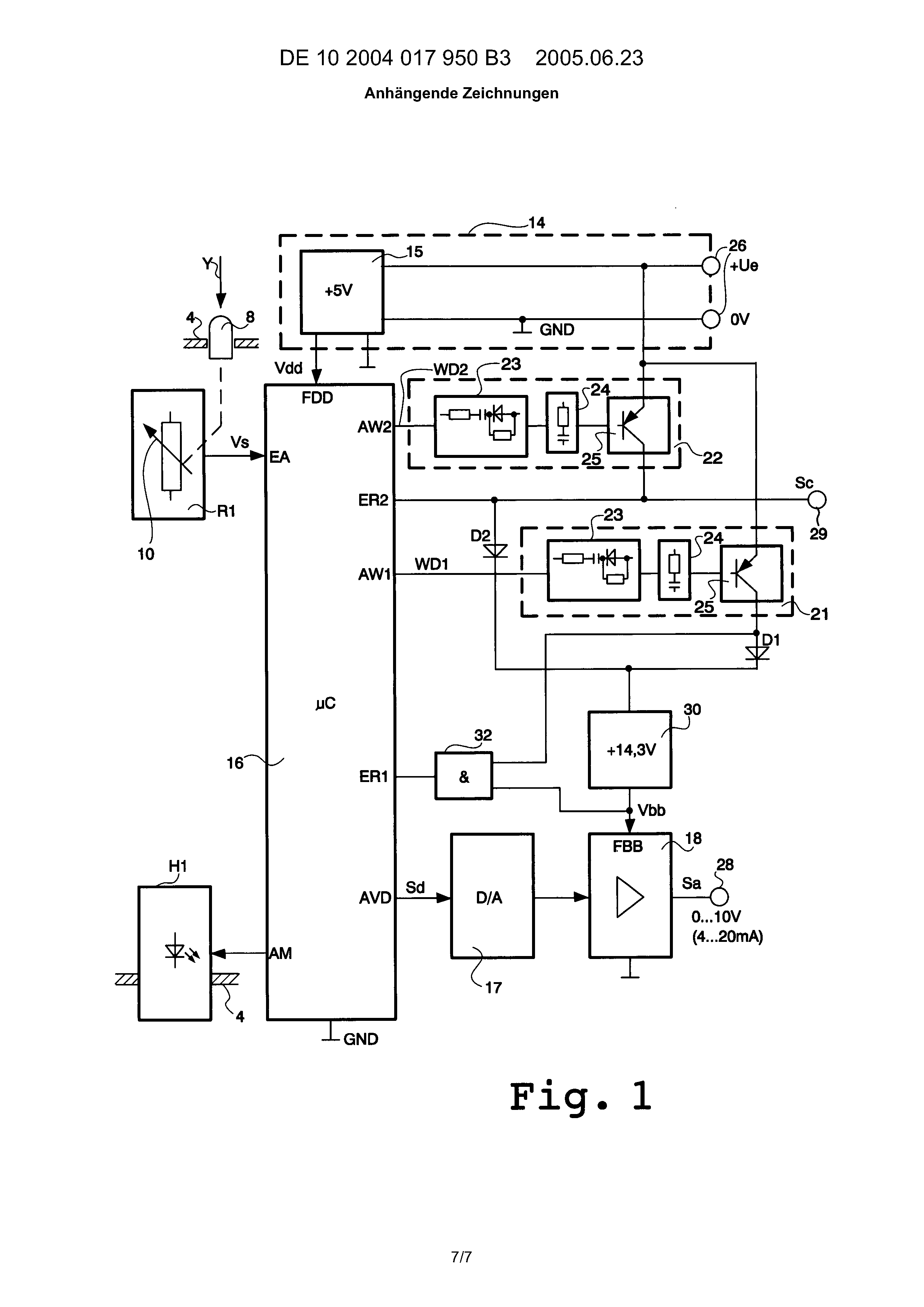
[0013] Fig. 1 die Blockdarstellung eines erfindungsgemäßen mechanisch-elektronischen Positionsgebers.
[0014] Der mechanisch-elektronische Positionsgeber 2 ist in einem kastenförmigen Gehäuse 4, dasallerdings nur rudimentär angedeutet ist, aufgebaut. Als mechanische Komponenten sind in dem Gehäuse4 ein mit oder entgegen der Federkraft einer nicht dargestellten Druckfeder in Betätigungsrichtung Yverschiebbarer Betätigungsstößel 8 sowie ein mit diesem gekoppelter Schleifer 10 eines Potentiometers R1gelagert. Im Gehäuse 4 sind weiterhin übliche Stromversorgungsmittel 14, ein Mikrocontroller16, ein DA-Wandler 17, eine Ausgangsstufe 18, eine erste und eine zweite Überwachungsstufe 21bzw. 22, eine Spannungsversorgungsstufe 30 sowie ein optisches Signalelement H1 angeordnet.Die elektronischen Komponenten sind auf einer Leiterplatte oder auf zwei miteinander verbundenenLeiterplatten befestigt. Über ein Paar erster Anschlussklemmen 26 wird eine Versorgungsspannung Uezugeführt, die einerseits direkt verwendet und anderseits mittels eines Spannungsreglers 15in ein erstes Versorgungspotenzial Vdd von +5 V für einen Stromversorgungsanschluss FDD desMikrocontroller 16 überführt wird. Die Versorgungsspannung Ue und das erste VersorgungspotenzialVdd sind auf das Bezugspotenzial GND (Massepotenzial) bezogen. Die Ausgangsstufe 18 wird überdie Überwachungsstufen 21, 22 mit der Versorgungsspannung Ue gespeist. Um die Einsatzmöglichkeiten desPositionsgebers 2 zu erhöhen, können dem Betätigungsstößel 8 austauschbare Antriebsköpfe vorgesetztwerden.
[0015] Die Position des Betätigungsstößels 8 wird auf den Schleifer 10 des Potentiometers R1übertragen. Am Schleifer 10 steht je nach Position des Betätigungsstößels 8 ein unterschiedlichhohes Schleiferpotenzial Vs an. Das auf das Bezugspotenzial GND bezogene SchleiferpotenzialVs wird an einen Analogeingang EA des Mikrocontrollers 16 geführt, von diesem in einen entsprechenden digitalenWert gewandelt und über einen Datenausgang ADV als Digitalgröße Sd an den DA-Wandler 17 übergeben. DerDA-Wandler 17 übergibt den gebildeten Analogwert an die Ausgangsstufe 18, deren Ausgang einenentsprechenden Analogwert eines Ausgangssignals Sa über eine zweite Anschlussklemme 28 zur externenVerwendung zur Verfügung stellt. Die Ausgangsstufe 18 ist beispielsweise als steuerbare Spannungsquellemit einem Bereich des Ausgangssignals Sa von 0 V bis 10 V oder als steuerbare Stromquelle miteinem Bereich des Ausgangssignals von 4 mA bis 20 mA ausgeführt. Der Gesamtbereich des AnalogsignalsSa entspricht dem nutzbaren Betätigungsweg des Betätigungsstößels 8. Der Mikrocontroller 16gibt über einen Meldeausgang AM bei bestimmten Betriebszuständen unterschiedliche Signale andas Signalelement H1 ab, um Fehler und bestimmte Zustände durch Leuchten oder Blinken zu signalisieren.
[0016] Der Mikrocontroller 16 gibt bei ordnungsgemäßem Betrieb über einen ersten Watchdog-SignalausgangAW1 ein erstes Watchdog-Signal WD1 und über einen zweiten Watchdog-Signalausgang AW2 ein zweitesWatchdog-Signal WD2 aus. Die Watchdog-Signale WD1, WD2 wechseln dynamisch zwischen einem Low-und einem High-Pegel mit einer Frequenz von etwa 5 kHz. Die ersten Watchdog-Signale WD1 werdender ersten Überwachungsstufe 21 und die zweiten Watchdog-Signale WD2 der zweiten Überwachungsstufe22 zugeführt. Die erste Überwachungsstufe 21 und die zweite Überwachungsstufe 22 enthalten jeweilseingangsseitig eine Ladungspumpe 23, ausgangsseitig einen Transistorschalter 25 und dazwischenangeordnet einen Ladungsspeicher 24. Ladungspumpen und Ladungsspeicher sind hier nur funktionellangedeutet und an sich aus der eingangs genannten US 5 426 776 A bekannt. Die Ladungspumpen23 können in fachgemäßer Weise auch mit Transistoren anstelle der angedeuteten Halbleiterventileausgestattet sein. Die Schaltstrecken der Transistorschalter 25 sind auf der einen Seite mitder Versorgungsspannung Ue und auf der anderen Seite im Falle der ersten Überwachungsstufe 21mit einer ersten Diode D1 und im Falle der zweiten Überwachungsstufe 22 mit einer zweiten DiodeD2 verbunden. Die verbundenen Katoden der Dioden D1, D2 sind mit dem Eingang der Spannungsversorgungsstufe30 verbunden, um über dessen Ausgang eine zweite Versorgungsspannung Vbb in Höhe von beispielsweise +14,3V gegenüber Bezugspotenzial GND an einen Stromversorgungsanschluss FBB der Ausgangsstufe 18zu liefern. Ausgangsseitig sind die erste Überwachungsstufe 21 und die Spannungsversorgungsstufe30 mit den Eingängen eines UND-Gliedes 32 verbunden, das ausgangsseitig mit einem ersten RückleseeingangER1 des Mikrocont-rollers 16 verbunden ist. Die zweite Überwachungsstufe 22 ist ausgangsseitig unmittelbar miteinem zweiten Rückleseeingang ER2 des Mikrocontrollers 16 und zusätzlich mit einer dritten Anschlussklemme29 zur Ausgabe eines binären Kontrollsignals Sc verbunden.
[0017] Bei ordnungsgemäßer Arbeitsweise gibt der Mikrocontroller 16 an seinen Watchdog-SignalausgängenAW1 und AW2 Watchdog-Signale WD1 und WD2 aus. Durch die Ladungspumpen 23 wird im Rhythmus derdynamisch wechselnden Watchdog-Signale WD1 und WD2 ständig Ladung von den Ladungsspeichern 24abgepumpt. Dadurch bleibt die Ladespannung der Ladungsspeicher 24 unterhalb eines Schwellenwertes,bei dem die Transistorschalter 25 noch leitend sind und damit über beide Überwachungsstufen21, 22 und die zugehörigen Dioden D1, D2 die Versorgungsspannung Ue zur Spannungsversorgungsstufe30 durchleiten. Durch das bereitgestellte zweite Versorgungspotenzial Vbb ist die Ausgangsstufe18 im aktiven Zustand. Unter weiter unten aufgeführten Bedingungen stellt die zweiten Anschlussklemme28 damit ein gültiges, dem aktuellen Schleiferpotenzial Vs entsprechendes Ausgangssignal Sazur Verfügung.
[0018] Bei Aussetzen des Mikrocontrollers 16 oder bei einem Absturz des im Mikrocontroller 16gespeicherten Programms endet die Ausgabe der Watchdog-Signale WD1 und WD2. In der Folge kann durchdie Ladungspumpen 23 keine Ladung mehr von den Ladungsspeichern 24 abgepumpt werden, sodassderen Ladespannung den bereits erwähnten Schwellenwert überschreitet. Mit Überschreiten desSchwellenwertes gehen die Transistorschalter 25 in den nichtleitenden Zustand über. Somit trennenbeide Überwachungsstufen 21, 22 die Versorgungsspannung Ue von der Spannungsversorgungsstufe30. Das Kontrollsignal Sc gibt durch den stationären Übergang auf den Low-Pegel in Nähe des BezugspotenzialsGND eine Warnung nach außen. Durch das Fehlen der zweiten Versorgungsspannung Vbb wird daraufhindie Ausgangsstufe 18 deaktiviert. Diese Sicherheitsfunktion ist jedoch nur unter der Voraussetzung gegeben,dass die Überwachungsstufen 21, 22 selbst funktionsfähig sind.
[0019] Um die Überwachungsstufen 21 und 22 ihrerseits auf ihre Funktionzu testen, bei ausfallendenWatchdog-Signalen WD1 und WD2 die Ausgangsstufe 18 zu deaktivieren, setzen die Watchdog-SignaleWD1 und WD2 mit einem periodischen Abstand von etwa 5 s aus. Die zum ersten Watchdog-SignalWD1 gehörenden ersten Aussetzintervalle Δt1 sind gegenüber den zum zweiten Watchdog-SignalWD2 gehörenden zweiten Aussetzintervallen Δt2 beispielsweise um etwa 0,5 s versetzt.
[0020] Mit Beginn eines ersten Aussetzintervalls Δt1 endet das Abpumpen von Ladung aus demLadungsspeicher 24 der ersten Überwachungsstufe 21, deren Transistorschalter 25 daraufhin imLaufe einiger Millisekunden in den nichtleitenden Zustand übergeht. Das bisher in Höhe der VersorgungsspannungUe anstehende Anodenpotenzial der ersten Diode D1 bricht zusammen. Währendem wird jedoch dieVersorgungsspannung Ue über den weiterhin leitenden Transistorschalter 25 der zweiten Überwachungsstufe22 und über die zweite Diode D2 an die Spannungsversorgungsstufe 30 geliefert, sodass keineUnterbrechung des Ausgangssignals Sa erfolgt. An dem mit der Spannungsversorgungsstufe 30 verbundenenEingang des UND-Gliedes 32 bleibt demnach der High-Pegel in Höhe des zweiten VersorgungspotenzialsVbb erhalten, währenddessen an dem mit der ersten Diode D1 verbundenen Eingang und damit aucham Ausgang des UND-Gliedes 32 vom High- zum Low-Pegel wechselt. Diesen Potenzialwechsel erkenntder Mikrocontroller 16 über seinen ersten Rückleseeingang ER1 als bestandenen Test der erstenÜberwachungsstufe 21 und beendet daraufhin nach etwa 100 µs das erste Aussetzintervall Δt1 mitder erneuten Ausgabe des dynamisch wechselnden ersten Watchdog-Signals WD1 über den ersten Watchdog-SignalausgangAW1 an die erste Überwachungsstufe 21, worauf diese die Versorgungsspannung Ue wieder durchleitet.
[0021] In gleicher Weise endet mit Beginn eines zweiten Aussetzintervalls Δt2 das Abpumpen vonLadung aus dem Ladungsspeicher 24 der zweiten Überwachungsstufe 22, deren Transistorschalter25 daraufhin im Laufe einiger Millisekunden in den nichtleitenden Zustand übergeht. Das bisherin Höhe der Versorgungsspannung Ue anstehende Anodenpotenzial der zweiten Diode D2 bricht zusammen. Währendem wirdjedoch die Versorgungsspannung Ue über den weiterhin leitenden Transistorschalter 25 der erstenÜberwachungsstufe 21 und über die erste Diode D1 an die Spannungsversorgungsstufe 30 geliefert, sodasskeine Unterbrechung des Ausgangssignals Sa erfolgt. Der Potenzialwechsel von High nach Low ander zweiten Diode D2 erkennt der Mikrocontroller 16 über seinen zweiten Rückleseeingang ER2als bestandenen Test der zweiten Überwachungsstufe 22 und beendet daraufhin nach etwa 100 µs daszweite Aussetzintervall Δt2 mit der erneuten Ausgabe des dynamisch wechselnden zweiten Watchdog-Signals WD2über den zweiten Watchdog-Signalausgang AW2 an die zweite Überwachungsstufe 22, worauf diesedie Versorgungsspannung Ue wieder durchleitet.
[0022] Sollte die Überwachungsstufe 21 oder 22 infolge eines Versagens - beispielsweise durchden Bruch einer Leitungsverbindung, einen Bauelementeausfall oder eine erhebliche Kapazitätsminderungdes Ladungsspeichers 24 - nicht auf das Aussetzintervall Δt1 bzw. Δt2 reagieren, wirdkeine entspre-chende Potenzialänderung am Rückleseeingang ER1 bzw. ER2 erkannt. Das begonnene AussetzintervallΔt1 bzw. Δt2 wird zum einen nicht beendet und der Mikrocontroller 16 gibt nach einerWartezeit von beispielsweise 10 ms eine digitale Null für die Digitalgröße Sd aus und fällt ineine Fehlerschleife, die er erst mit Beseitigung der Störung verlassen werden kann. Gleichzeitigsendet der Mikrocontroller 16 über seinen Meldeausgang AM ein Fehlermeldesignal an das SignalelementH1 zum blinkenden Ansteuern einer in Warnfarbe gehaltenen Leuchtdiode. Die Watchdog-SignaleWD1, WD2 werden im Fehlerfall nicht mehr als dynamisch wechselnde Signale ausgegeben. Alleinschon durch das fehlende Wechselverhalten des zweiten Watchdog-Signals WD2 wechselt das KontrollsignalSc von einem hochliegenden Potenzial in Nähe der positiven Versorgungsspannung Ue auf ein tiefliegendesPotenzial in Nähe des Bezugspotenzials GND. Dieser Potenzialwechsel kann z. B. von einer mitder dritten Anschlussklemme 29 verbundenen externen Steuerung als Fehlermeldung ausgewertetwerden.
[0023] Die Spannungsversorgungsstufe 30 weist strombegrenzende Eigenschaften auf, sodass beiÜberlastung der Ausgangsstufe 18 - insbesondere infolge eines Kurzschlusses an der zweiten Anschlussklemme28 - die zweite Versorgungsspannung Vbb zusammenbricht. Dieser Vorgang wird über das UND-Glied32 am ersten Rückführeingang ER1 vom Mikrocontroller 16 wahrgenommen, worauf dieser durch Beendender Watchdog-Signale WD1 und WD2 die Überwachungsstufen 21 und 22 sperrt und damit das KontrollsignalSc abschaltet und die Ausgangsstufe 18 deaktiviert.
Bezugszeichenliste
2 Positionsgeber4 Gehäuse8 Betätigungsstößel10 Schleifer14 Stromversorgungsmittel15 Spannungsregler16 Mikrocontroller17 AD-Wandler18 Ausgangsstufe21; 22 Überwachungsstufen23 Ladungspumpe24 Ladungsspeicher25 Transistorschalter26; 28; 29 Anschlussklemmen30 Spannungsversorgungsstufe32 UND-GliedAM MeldeausgangAVD DatenausgangAW1; AW2 Watchdog-SignalausgängeD1; D2 DiodenEA AnalogeingangFBB; FDD StromversorgungsanschlüsseGND BezugspotenzialH1 SignalelementR1 PotentiometerSa AusgangssignalSc KontrollsignalSd DigitalgrößeUe VersorgungsspannungVbb; Vdd VersorgungspotenzialeVs SchleiferpotenzialWD1; WD2 Watchdog-SignaleY BetätigungsrichtungΔt1; Δt2 Aussetzintervalle
1. Mechanisch-elektronischer Positionsgeber, enthaltend ein Gehäuse (4), einen Betätigungsstößel(8), ein vom diesem beaufschlagtes Potentiometer (R1), einen Mikrocontroller (16), eine Ausgangsstufe(18) und Gleichstromversorgungsmittel (14) zur Bereitstellung von wenigstens einer Versorgungsspannung (Ue),wobei durch den Mikrocontroller (16) ein der jeweiligen Position des Betätigungsstößels (8)entsprechendes, am Schleifer (10) des Potentiometers (R1) anstehendes Schleiferpotenzial (Vs)als Digitalwert erfasst wird, dadurch gekennzeichnet, dass - ein Datenausgang (AVD) des Mikrocontroller (16) für den jeweiligen Digitalwert über einen DA-Wandler(17) mit der Ausgangsstufe (18) zur Ausgabe eines im wesentlichen zum Schleiferpotenzial (Vs)proportionalen elektrischen Ausgangssignals (Sa) verbunden ist, - der Mikrocontroller (16) über einen ersten und über einen zweiten Watchdog-Signalausgang (AW1;AW2) zur Ausgabe eines dynamisch wechselnden, periodisch mit ersten bzw. zweiten Aussetzintervallen(Δt1; Δt2) beaufschlagten ersten bzw. zweiten Watchdog-Signals (WD1; WD2) verfügt, wobeidie zweiten Aussetzintervalle (Δt2) gegenüber den ersten Aussetzintervallen (Δt1) zeitlichversetzt sind, - mit dem ersten und mit dem zweiten Watchdog-Signalausgang (AW1; AW2) jeweils eine erste bzw.zweite Überwachungsstufe (21; 22) verbunden ist, die mit einem von einer Ladungspumpe (23) regelmäßigentladbaren Ladungsspeicher (24) ausgestattet ist und die anliegende Versorgungsspannung (Ue)bei dynamisch wechselnden ersten bzw. zweiten Watchdog-Signalen (WD1; WD2) ausgangsseitig durchleitet,dagegen bei aussetzenden ersten bzw. zweiten Watchdog-Signalen (WD1; WD2) sperrt, - die Ausgänge der Überwachungsstufen (21; 22) über jeweils eine erste bzw. zweite Diode (D1;D2) wenigstens mittelbar zur Durchleitung der ersten Versorgungsspannung (Ue) mit einem Stromversorgungsanschluss (FBB)der Ausgangsstufe (18) verbunden sind, - die erste und die zweite Überwachungsstufe (21; 22) ausgangsseitig wenigstens mittelbar jeweils aneinen ersten bzw. zweiten Rückleseeingang (ER1; ER2) des Mikrocontrollers (16) geführt sind, sodass bei ausbleibender ausgangsseitiger Sperrungder ersten oder der zweiten Überwachungsstufe (21; 22) während eines der ersten bzw. zweitenAussetzintervalle (Δt1; Δt2) die Aussetzung der Watchdog-Signale (WD1, WD2) bestehenbleibt.
2. Positionsgeber nach vorstehendem Anspruch, dadurch gekennzeichnet, dass die zweite Überwachungsstufe (22)ausgangsseitig an eine Kontroll-Anschlussklemme (29) geführt ist.
3. Positionsgeber nach einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass zwischendem Verbindungspunkt der Dioden (21; 22) und dem Stromversorgungsanschluss (FBB) der Ausgangsstufe(18) eine Spannungsversorgungsstufe (30) angeordnet ist.
4. Positionsgebers nach vorstehendem Anspruch, gekennzeichnet durch eine strombegrenzendeSpannungsversorgungsstufe (30).
5. Positionsgeber nach Anspruch 3 oder 4, dadurch gekennzeichnet, dass die erste Überwachungsstufe (21)und die Spannungsversorgungsstufe (30) über ein UND-Glied an den ersten Rückleseeingang (ER1)und die zweite Überwachungsstufe (22) unmittelbar an den zweiten Rückleseeingang (ER2) geführt sind.
6. Positionsgeber nach einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass derMikrocontroller (16) über einen Meldeausgang (AM) verfügt, der mit einem optischen Signalelement(H1) verbunden ist.
7. Positionsgeber nach einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass dieAussetzintervalle (Δt1; Δt2) einen Wiederholabstand im einstelligen Sekundenbereichaufweisen.
Es folgt ein Blatt Zeichnungen