Betätigungsmechanismus einer Greifer-Webmaschine
Die Erfindung betrifft einen Betätigungsmechanismus einer Greifer-Webmaschine, welcher eine hin- und herschwenkbare Weblade sowie ein flexibles, mittels eines Antriebsrades angetriebenes Band, das eine Klemme für den Eintrag eines Schussfadens trägt, umfasst. Ein Betätigungsmechanismus nach dem Oberbegriff des Anspruchs 1 ist beispielsweise aus der Eine vergleichbare Vorrichtung zum Umwandeln einer Rotation in eine hin- und hergehende Drehbewegung ist aus der Ein Betätigungsmechanismus für schützenlose Webmaschinen mit flexiblen Bändern ist auch aus der Des Weiteren ist aus der Aus der Schließlich ist aus der Der Erfindung liegt die Aufgabe zugrunde, einen vereinfachten Betätigungsmechanismus für eine Weblade und/oder einen Schussfadeneinsetzgreifer einer Greifer-Webmaschine anzugeben. Diese Aufgabe wird erfindungsgemäß gelöst, durch einen Betätigungsmechanismus mit den Merkmalen des Anspruchs 1. Dieser Betätigungsmechanismus weist mehrere hin- und herschwenkende Teile, nämlich eine Weblade sowie ein zum Antrieb eines flexiblen Bandes vorgesehenes Antriebsrad, auf. An dem flexiblen Band ist eine Klemme, auch als Greifer bezeichnet, befestigt, die für den Eintrag eines Schussfadens in der Greifer-Webmaschine vorgesehen ist. Erfindungsgemäß weist sowohl das Antriebsrad als auch die Weblade einen elektrischen Direktantrieb auf. Unter einem elektrischen Direktantrieb der Weblade wird dabei ein Antrieb mit einem Elektromotor verstanden, dessen Rotor starr mit einem Teil der Weblade verbunden ist. Der elektrische Direktantrieb des Antriebsrades und des auf diesem geführten Bandes ist auf verschiedene Weisen realisierbar. Entweder wird das Antriebsrad mittels eines Elektromotors, dessen Rotor starr mit dem Antriebsrad verbunden ist, direkt angetrieben, oder das Band wird mittels eines elektrischen Linearantriebs direkt angetrieben, wobei im letztgenannten Fall das Antriebsrad keinen eigenen elektrischen Antrieb aufweist. Die elektrischen Direktantriebe haben den wesentlichen Vorteil, dass der Betätigungsmechanismus der Greifer-Webmaschine mit nur wenigen Teilen realisierbar ist. Insbesondere entfallen im Vergleich zu herkömmlichen Betätigungsmechanismen Getriebe, Nockenwellen, Nockenfolger, Kipphebel, sphärische Kurvenscheiben und ähnliche Teile. Damit sind eine hohe Effektivität der Kraftübertragung sowie eine einfache Montierbarkeit des gesamten Betätigungsmechanismus gegeben. Das bei komplizierteren mechanischen Übertragungsvorrichtungen in der Regel unvermeidliche Spiel ist prinzipbedingt nicht vorhanden. Mechanische Synchronisierungseinrichtungen sind durch elektronische ersetzt. Zusätzlich zum Entfall mechanischer Bauteile hat dies den Vorteil, dass sich Bewegungsabläufe, im vorliegenden Fall die oszillierenden Bewegungen der Weblade und/oder des die Klemme für den Schussfadeneintrag haltenden Bandes, beliebig variieren lassen. Der gesamte Betätigungsmechanismus ist aufgrund der vorzugsweise mehreren, mechanisch voneinander unabhängigen elektrischen Direktantriebe kompakt aufgebaut. Schließlich wirken sich die Direktantriebe auch positiv auf den Wartungsaufwand sowie auf die Lebensdauer des Betätigungsmechanismus der Greifer-Webmaschine aus. Als elektrischer Direktantrieb der Weblade und des Antriebsrades des Bandes wird vorzugsweise ein Torque-Motor eingesetzt. Es handelt sich dabei um einen 3-Phasen AC-Synchronmotor, der sich insbesondere durch ein hohes Beschleunigungsvermögen auszeichnet. Torque-Motoren sind beispielsweise aus der Insbesondere in Fällen, in denen das Band nicht per Linearantrieb sondern durch das direkt angetriebene Antriebsrad oszillierend bewegt wird, weist das Band in vorteilhafter Ausgestaltung eine Perforation auf. In Zusammenwirkung mit einer Verzahnung des Antriebsrades ist somit jeglicher Schlupf des Bandes auf dem Antriebsrad ausgeschlossen. Der elektrische Direktantrieb, insbesondere des Antriebsrades, umfasst vorzugsweise eine Welle, welche mittels zweier Wälzlager gelagert ist, wobei als Wälzlager besonders axial gegeneinander vorgespannte Schrägkugellager geeignet sind. Alternativ ist es auch möglich, eines der Wälzlager als zweireihiges Schrägkugellager auszuführen. In diesem Fall kann das zweite Wälzlager ein Loslager, beispielsweise ein Nadellager, sein. Ist die Welle mit dem Antriebsrad gekoppelt, so ist dieses vorzugsweise ausschließlich mittels der beiden Wälzlager des elektrischen Direktantriebs gelagert. Im Fall von Schwenkbewegungen ausführenden elektrischen Direktantrieben ist deren Winkellage und damit die Winkellage des jeweils angetriebenen Teils durch einen Sensor erfassbar. In analoger Weise ist im Fall eines durch einen Linearantrieb direkt angetriebenen Bandes dessen Position mittels eines Sensors detektierbar. Die typischerweise in einem Rahmen verschwenkbar gelagerte Weblade kann auf verschiedene Weisen direkt elektrisch angetrieben sein: Zum einen ist es möglich, einseitig oder beidseitig des Rahmens einen bzw. zwei Elektromotoren anzubringen. Die beidseitige Anordnung der Elektromotoren stellt zwar vergleichsweise geringe Anforderungen an deren Leistung sowie an die Steifigkeit der Weblade sowie der Rahmenkonstruktion, erfordert jedoch eine präzise Synchronisierung der Antriebe. Auf eine solche Synchronisierung mehrerer Direktantriebe der Weblade kann verzichtet werden, wenn diese mittels eines einzigen Elektromotors direkt angetrieben ist, der, vorzugsweise mittig, innerhalb der Rahmenkonstruktion angeordnet ist. Die mittige Anordnung des elektrischen Direktantriebs der Weblade trägt auch zur Minimierung von Torsion innerhalb kraftübertragender Teile bei. Eine bevorzugte Ausführungsform des erfindungsgemäß ausgebildeten Betätigungsmechanismuses wird nachfolgend unter Bezugnahme auf die beigefügten Zeichnungen näher erläutert. Dabei zeigen:
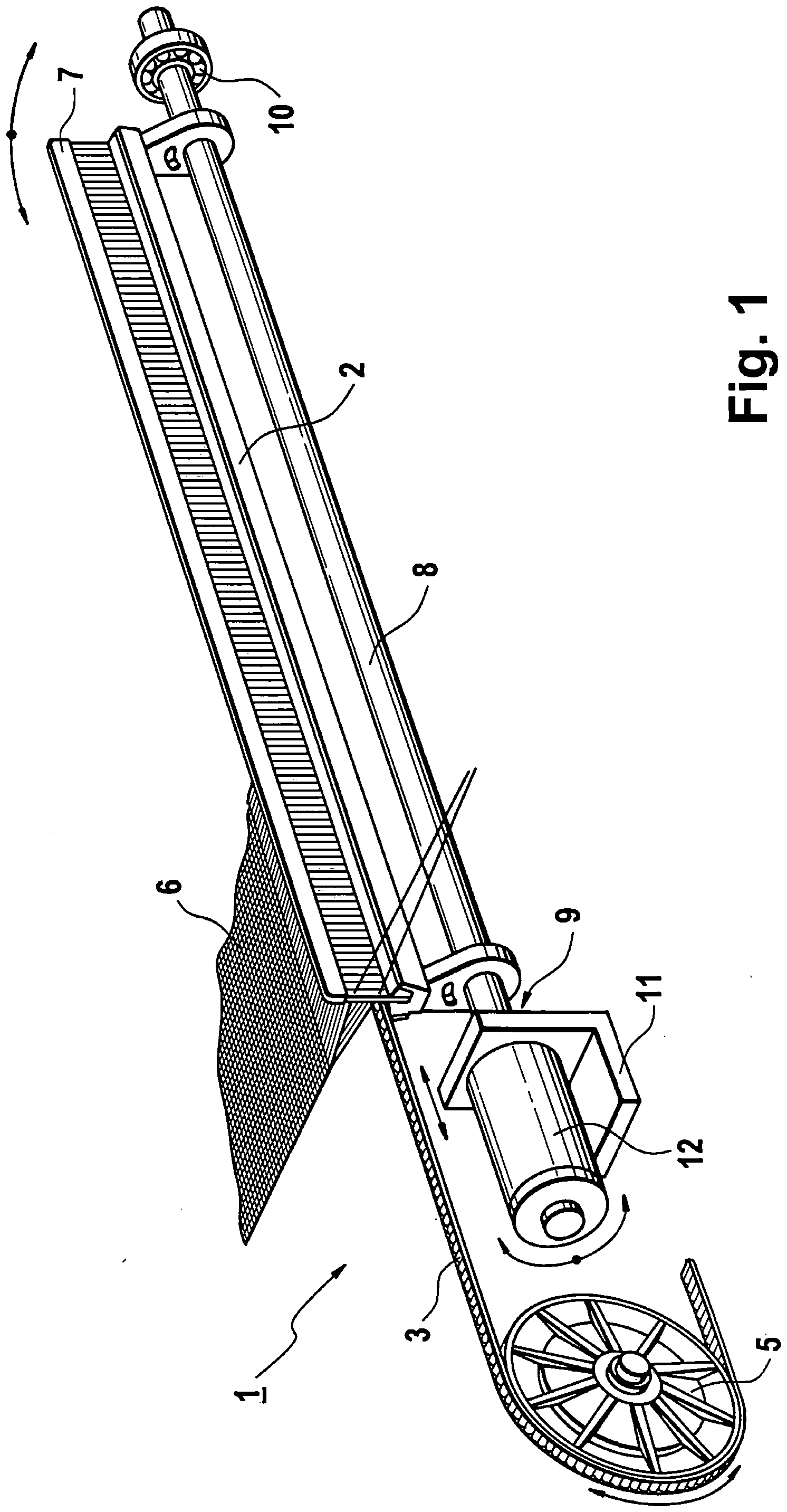
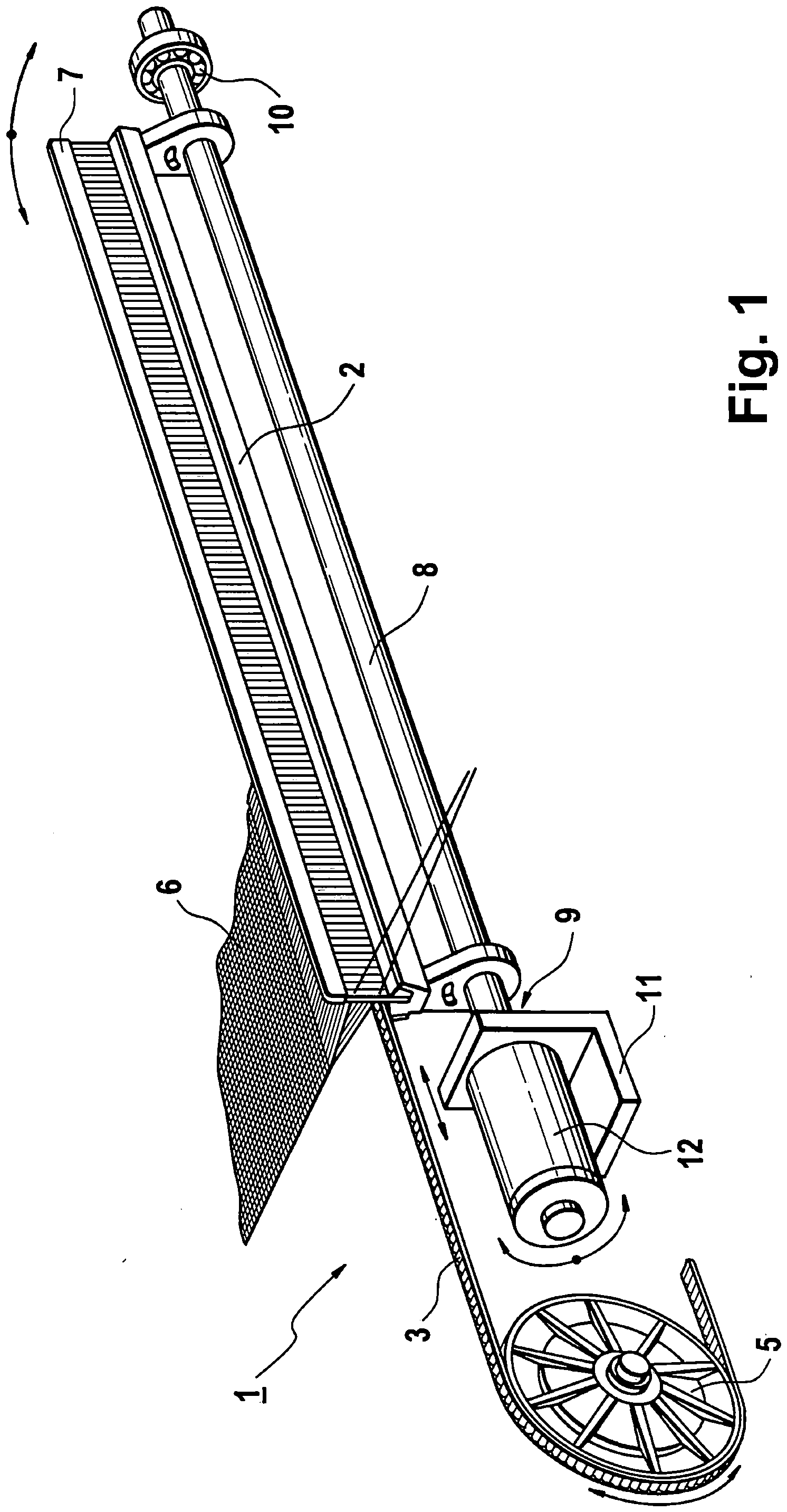
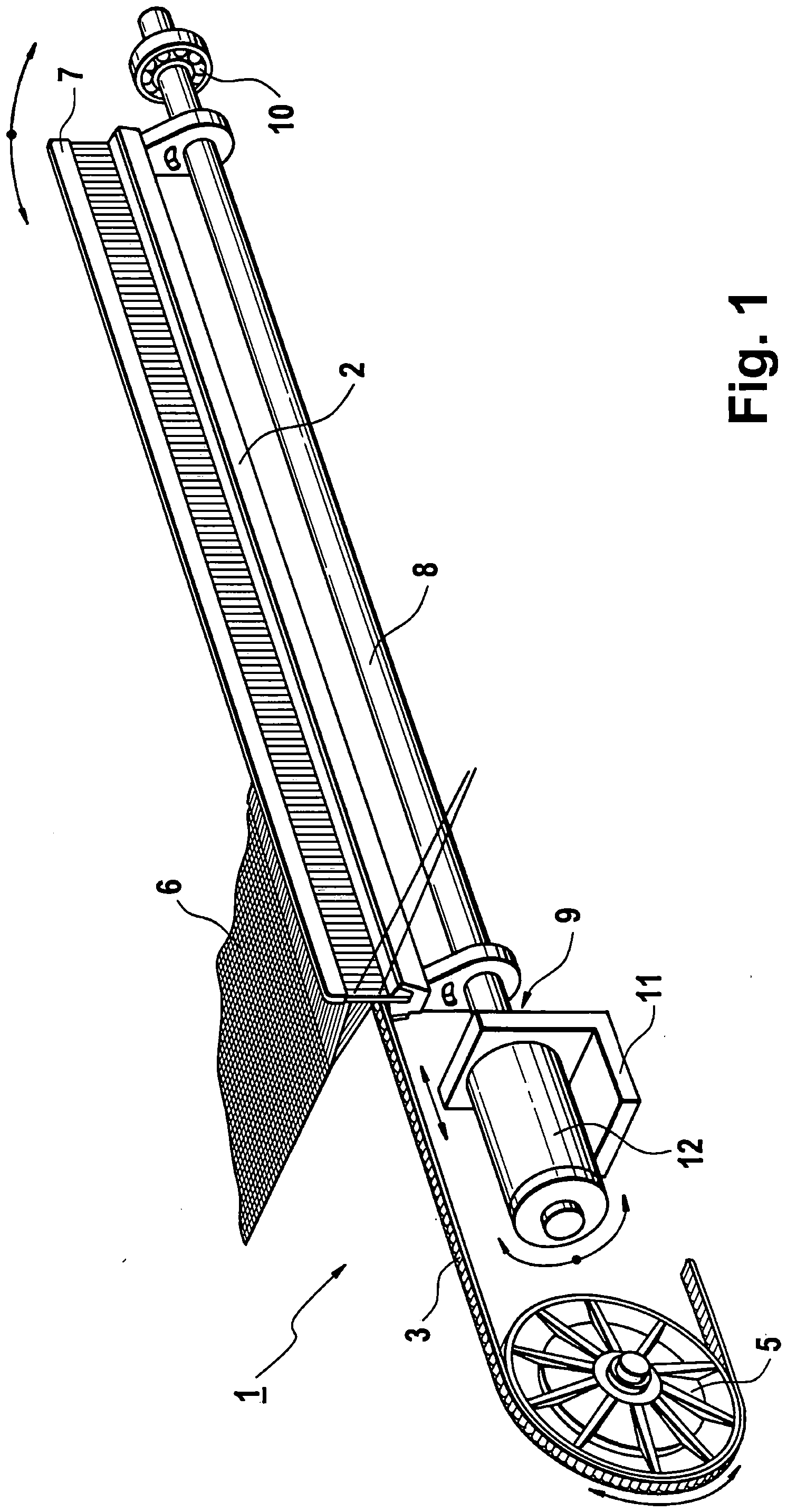
Die Die Weblade 2 weist ein sich mindestens über die gesamte Breite des mit dem Bezugszeichen 6 gekennzeichneten Gewebes erstreckendes Webblatt 7 sowie eine mit diesem drehfest verbundene Welle 8 auf. Die Welle 8 ist mittels zweier Wälzlager 9, 10 hin- und herschwenkbar gelagert, wobei die Wälzlager 9, 10 in einer starren Rahmenkonstruktion 11 der Greifer-Webmaschine gehalten sind. Die Welle 8 ist mittels eines elektrischen Direktantriebs 12 in Form eines Torque-Motors, der sich außerhalb der Rahmenkonstruktion 11 befindet, angetrieben. Der Läufer des Torque-Motors 12 ist drehfest mit der Welle 8 der Weblade 2 gekoppelt. In den Der in In der Ausführungsform nach den Das Antriebsrad 5 ist auf der Welle 14 mittels eines Halteelementes 17 sowie eines Sicherungselementes 18 verdrehsicher und in axial festgelegter Position angeordnet. Beim elektrischen Direktantrieb 12 des Antriebsrades 5 handelt es sich um einen AC-Synchronmotor, der drei im Stern geschaltete Spulensysteme aufweist, die mit Hilfe eines Umrichters ein magnetisches Drehfeld erzeugen. Damit ist eine Regelung der Drehzahl vom Stillstand bis zur Maximaldrehzahl möglich. Die Polpaarzahl des mit dem Bezugszeichen 21 gekennzeichneten Läufers des elektrischen Direktantriebs 12 einerseits und dessen Stators 22 andererseits sind nicht ganzzahlig teilbar, sodass bei der Rotation der Welle 14 höchstens in geringem Maße durch magnetische Anziehung erzeugte Rastkräfte, sogenannte Kraftrippel, auftreten. Zur Erfassung der Winkelposition des Antriebsrades 5 und damit der Positionierung des Bandes 3 ist ein Sensor 19 vorgesehen, der beispielsweise als optischer Inkremental- oder Absolutwertgeber arbeitet. In analoger Weise wird auch die Positionierung der Weblade 2 mittels eines Sensors 20 detektiert. Die Sensoren 19, 20 sind über nicht dargestellte Steuer- und Regeleinrichtungen miteinander verknüpft. Anstelle separater Sensoren 19, 20 oder zusätzlich zu diesen können die elektrischen Direktantriebe 12 mit internen, insbesondere magnetischen, Messsystemen ausgerüstet sein. Betätigungmechanismus (1) einer Greifer-Webmaschine, mit einen flexiblen, mittels eines Antriebsrades (5) angetriebenen Band (3), das eine Klemme (4) für den Eintrag eines Schussfadens trägt, sowie mit einer hin- und herschwenkbaren Weblade (2), dadurch gekennzeichnet, dass sowohl das Antriebsrad (5) als auch die Weblade (2) einen elektrischen Direktantrieb (12) aufweisen. Betätigungmechanismus (1) einer Greifer-Webmaschine, mit einen flexiblen, mittels eines Antriebsrades (5) angetriebenen Band (3), das eine Klemme (4) für den Eintrag eines Schussfadens trägt, sowie mit einer hin- und herschwenkbaren Weblade (2), dadurch gekennzeichnet, dass sowohl das Antriebsrad (5) als auch die Weblade (2) einen elektrischen Direktantrieb (12) aufweisen. Betätigungsmechanismus (1) nach Betätigungsmechanismus (1) nach einem der Betätigungsmechanismus (1) nach einem der Betätigungsmechanismus (1) nach Betätigungsmechanismus (1) nach Betätigungsmechanismus (1) nach Betätigungsmechanismus (1) nach einem der Betätigungsmechanismus (1) nach einem der Betätigungsmechanismus (1) nach Betätigungsmechanismus (1) nach einem der Gebiet der Erfindung
Hintergrund der Erfindung
Aufgabe der Erfindung
Zusammenfassung der Erfindung
Figurenliste
Ausführliche Beschreibung der Zeichnungen
Bezugszeichenliste