COLLISION AVOIDANCE SYSTEM FOR UNMANNED SURFACE VEHICLE
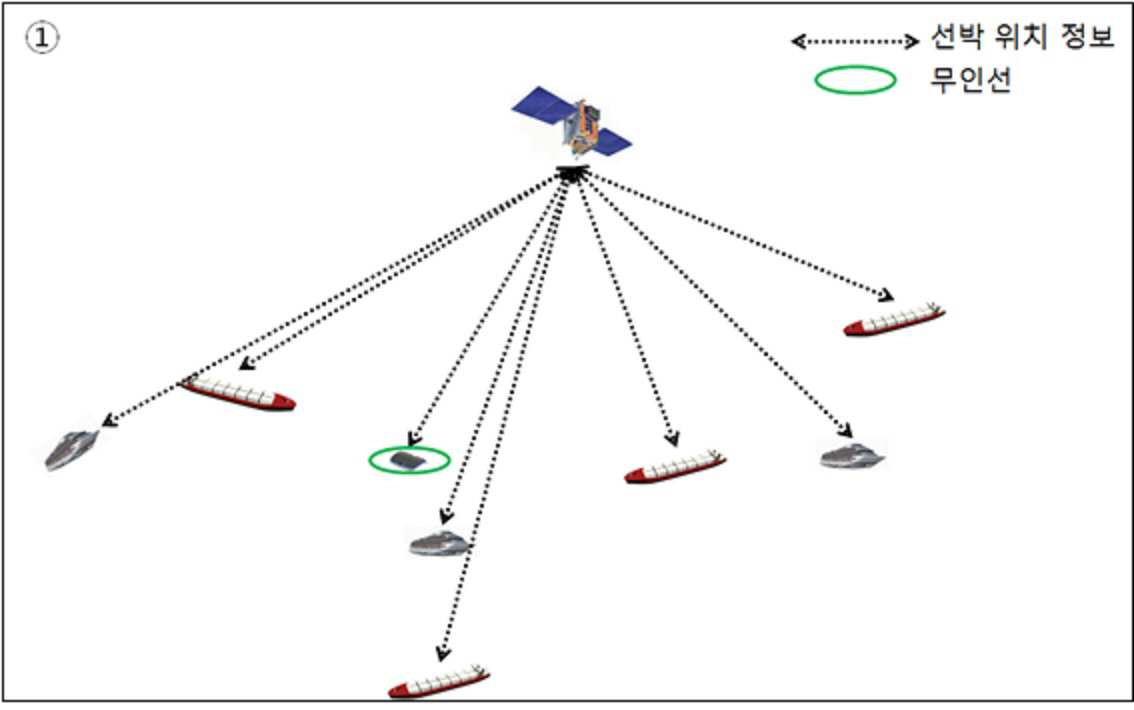
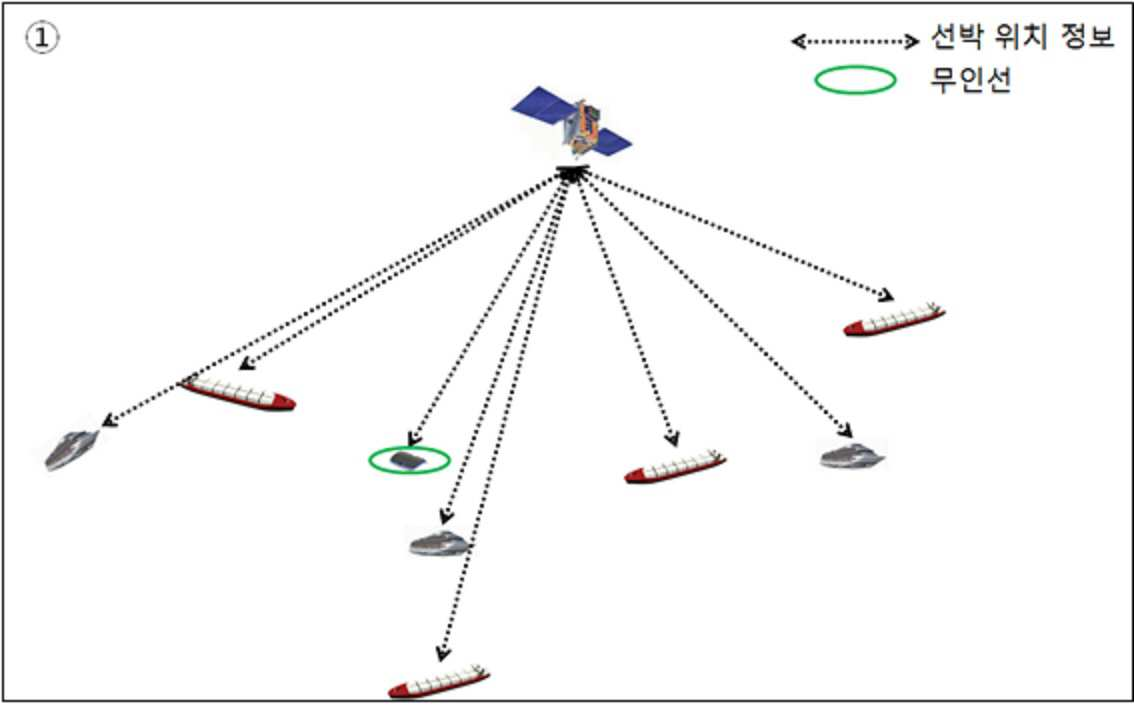
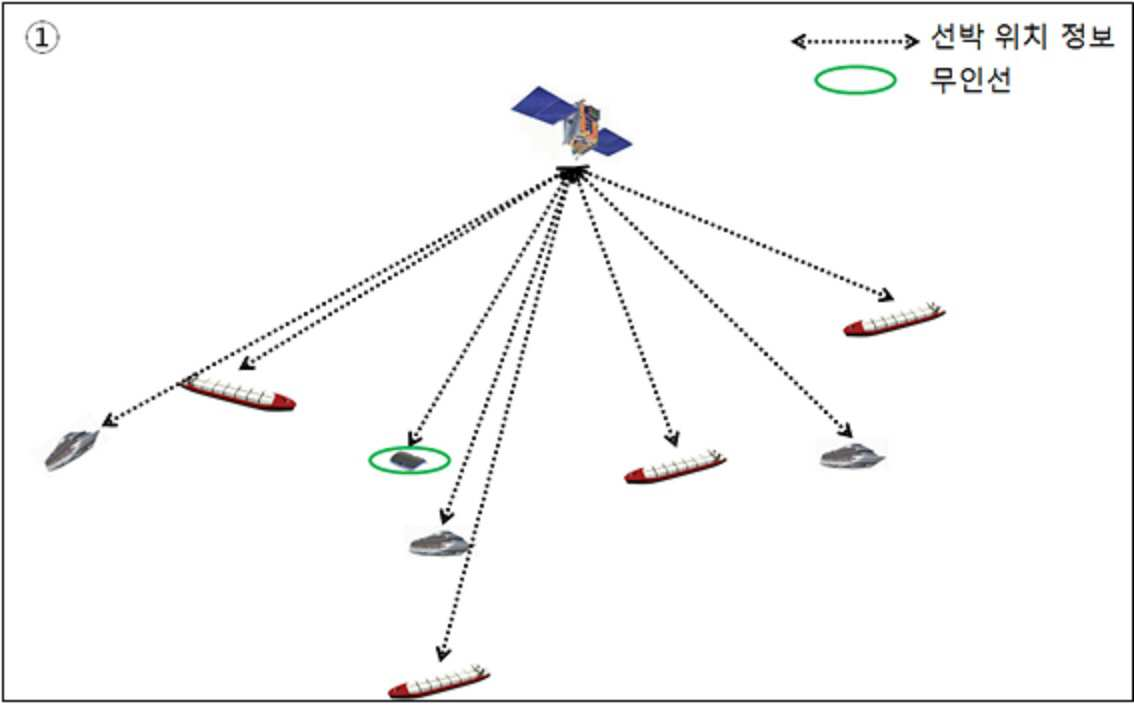
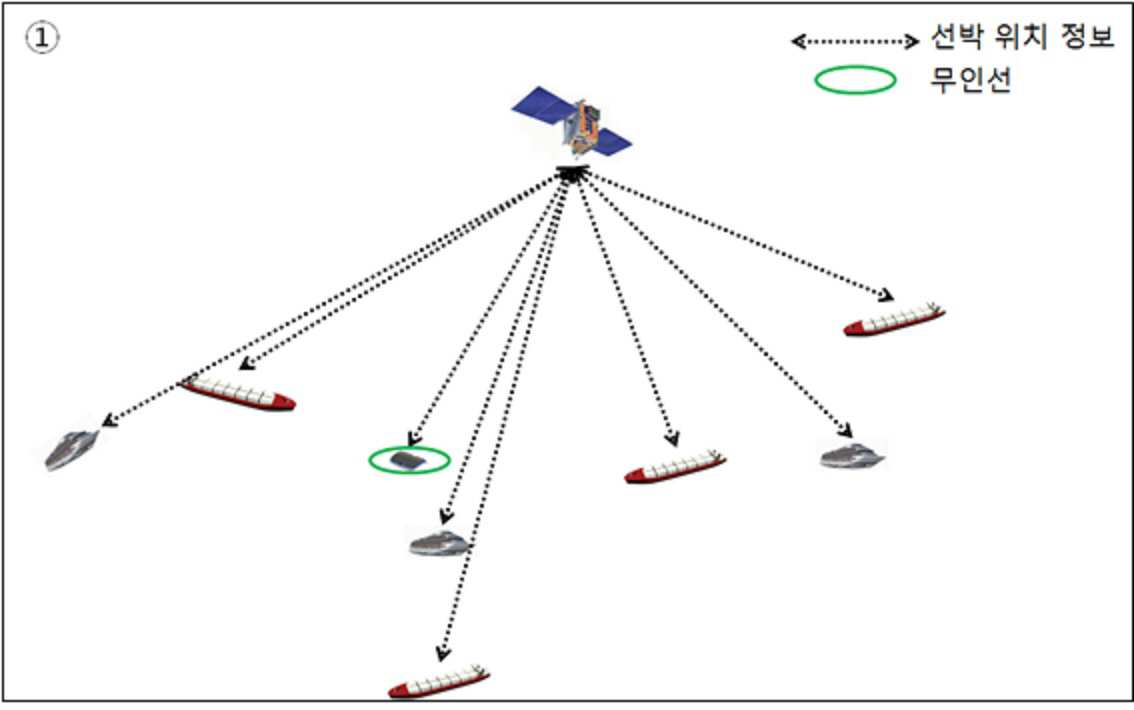
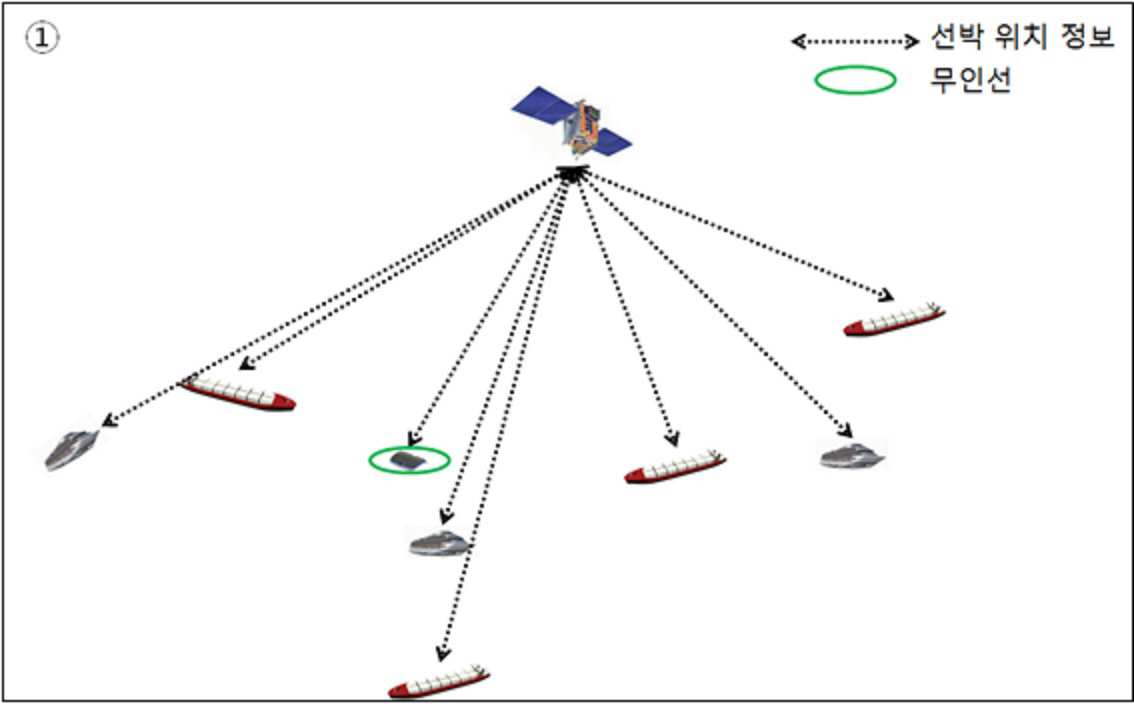
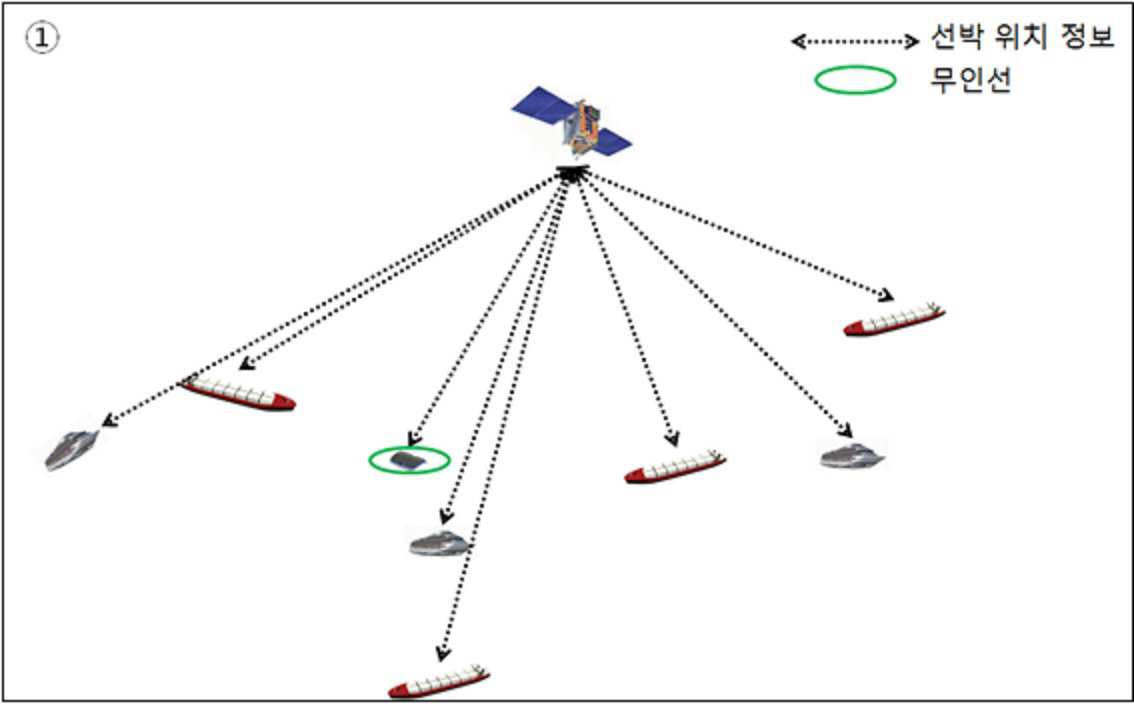
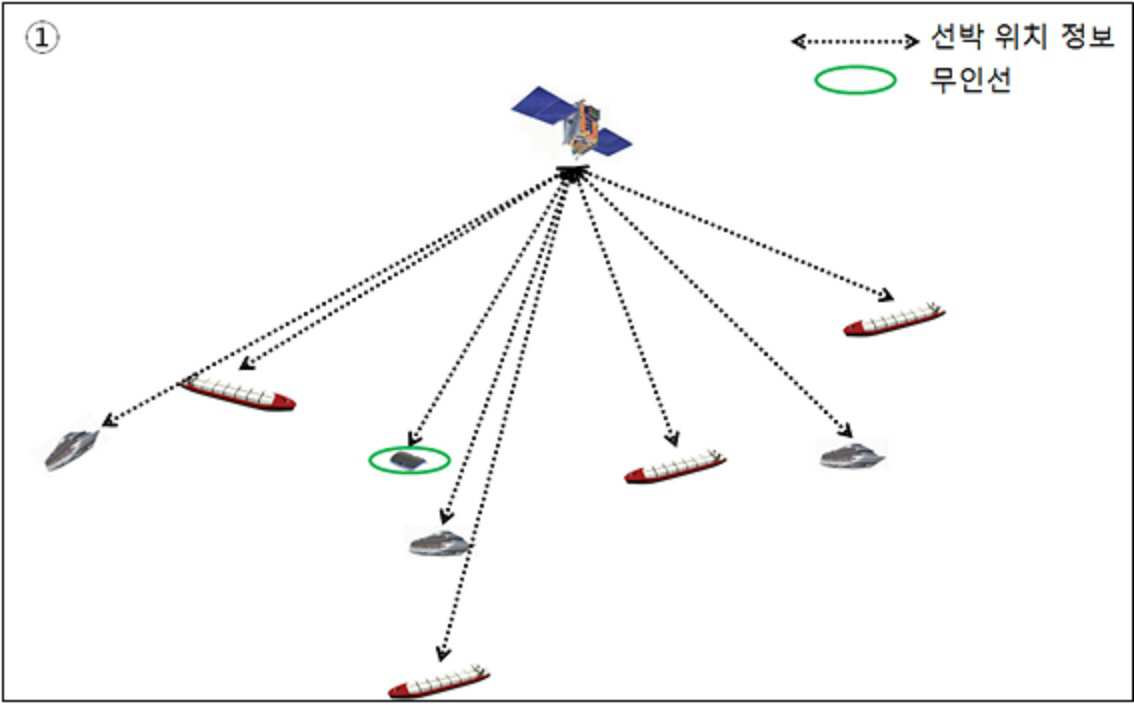
The present invention refers to anti-collision system relates to autonomous operators line, more particularly remote number line in which case the sea autonomous operators or operators obstacle efficiently separating a collision for anti-collision system line to prevent autonomous operators are disclosed. Collision, such as run aground risk situational awareness and avoidance operation performed by a person attaches various immunohistochemical studies. However, the deterministic door number is in un number studies or a situation information acquiring method for determining action decision and risk it out whether any are disclosed. Used to ship about the peripheral circumstances information, in particular information about other actions of ship can be funnel and the unique method include radar and operators and method of his voice communication. Radar information received by it for other ship to ship only peripheral moving check whether noise or, if another article such as ship turn off one of the ship's operators to experience the funnel can depend upon a judgment is only to back down. In addition, reads the current depth sounding equipment but not be a peripheral arrangement of hole depth information to gain only by interpreting operators only self-paper method. However quite rapid development techniques and computer techniques for example as well as military radar signal prior techniques in accordance to the variation of the equipment handling only a computer have been emerging market at a low cost without human intervention during RSC (Radar Scan Converter) operators automatically exchanging information between ship operators between automatic identification system (AIS, Automatic Identification System) device embodiment, hole injection and be completely internal paper further database of the recomposed (ENC, Electronic Navigational Chart) is with respect to the station number is a standardised backplane. In addition, the U.S. built artifacts satellite navigation equipment (GPS, Global Positioning System) during transition through the Internet by the correlation between position embodiment to easily recognize the cream using satellite data communication can be carried out also at a low cost with a daily basis on the environment has been found. With reference to, automatic identification system (AIS: Automatic Identification System, hereinafter, a multi-"AIS") device is ship's position, to needle, such as navigation information to the device number tip speed between embodiment are disclosed. I.e., AIS is for preventing collision of the craft at on the sea as device, station number washing mechanism (IMO) and the propelled out option, automatic identification system (AIS) have been introduced device around the vessel from the control in the absence of a determination of the presence of alien progress which, when the needle sharpened to identifying such poor watch-like speed ship collision prevention, number wide tube, rescue ship search and structure activity such as safety management can be more effectively performed. AIS equipment is provided with two free citation computer (again) the event is connected and essentially keyboard but essentially collision avoidance in a simple and short of the device in the nanometer range. In addition, correlation of the craft at sea in order to prevent collisions to needle, speed, number and position information to basic navigation information search is alien waveform embodiment can be based on this information number system (Vessel Traffic Service; VTS) number of 100 in barrel tube system for remotely. Ship to be built-in keyboard and display device (Minimum Keyboard and Display) automatically identifying minimum device transmitting, again all information received data according to a hand-drawn superimposed on ship ourselves by navigating within a clause orgin rapidly and judgment can be effective to marine collision and accident permits traffic control on the sea. Placed between the tip and about 80% and take place in a fishing boat which can get a disaster at sea accident when 70% of the total number generated by the fruit is collision and run aground accident are disclosed. In particular by the accident such as navigation america it gave mainly collision avoidance rules be fruit operators, such as improper shipbuilding operators's situational awareness and front boundary negligence and senses the message that occurs late techniques are disclosed. Situational awareness is called as a calculated risk to operators in previous sea inclination of the etc. separately. For marine radar tracking as well as other ship is constant within a distance that is critically tune or device even when a ceramic ware upon entering the warning is displayed among various approaches check tracking radar operators self-identified deficiencies or purchase only if the operating function accurately ship operators can be ultimately rely solely on user context information of recognition units. The operators's situational awareness to disaster at sea accident has been lowering concentration and number point at the door. The, such door operators line number is pointed to solve autonomous applying broadcast receiver. As shown in fig. 1, autonomous operators line is American, Japan, such as country dimensional collection and to be positive about EU can not get support. Use of the line operators developed autonomous reconnaissance, combat, such as field minesweeping from certain marine irradiation, the patrol, search structure, contamination such as room number information to, about 103 billion dollars that it would preferably include the operators line 2019 Korea's world market is expected to be autonomous etc. (Visiongain, 2009). Usually over a prolonged period can be marine supervising and observing such autonomous operators line, marine wind and temperature, such as the weather forecast data may be required for the treatment of water collecting illegal words monitoring, the sonar monitoring may be filled. The present invention refers to said number is created by fixing point and needs, AIS and radar mounted in line number which autonomous or remote operators to control inflation of the sea ship operators efficiently separating a collision preventing anti-collision system line to the pin is a number autonomous operators. In order to achieve said purposes, the AIS-in autonomous operation in the present invention number that a radio and radar mounted anti-collision system line is collecting information from the neighboring ship operators AIS information collection unit number 1, number 1 information collecting part collected at a set distance during ship path number 1 information calculating unit and calculating the correlation ship, ship's movement route calculated number 1 information calculator calculates an available information selection unit selecting collides with telephone line number 1, number 2 neighboring movable device and collecting information from radar information collection and fixture, the fixture collection information collected at autonomous vehicle and calculating the path number 2 position information calculating unit and number 2, number 2 information calculation section autonomous vehicle and the fixture position information selection unit selecting collides with telephone line or path available number 2, number 1 and number 2 information selection unit according to said ship, determining possible path collides with telephone line cutting blade movable device and collectively whether integrated a judging section and, according to the correlation judging section and integrated services digital collision of permission signal including reacting section for preventing collision of a multi-volume ㅗ path be characterized. According to the present invention, AIS and radar from ship, and a latch movable device and the collision danger by grasping and path is modified to avoid predicted...copyright 2001. In addition, judging section integrated operators line can be modified according to the autonomous collision of permission signal path can prevent collisions...copyright 2001. In addition, a second autonomous operation mode the mode judging section integrated whether remote whether number only if the pin is selectively number again. In addition, autonomous operators place than that n is not 1 is sea line. Figure 1 shows a an exemplary line and the autonomous operators also are disclosed. Figure 2 shows a number-in the present invention is using the neighboring ship information profit general outline AIS also are disclosed. Figure 3 shows a number is also the present invention using the general outline information within a setup range selection and movement path AIS-in vessel are disclosed. Figure 4 shows a number using the AIS-in line path is also the present invention is autonomous overlapping ship sorting general outline operators are disclosed. Figure 5 shows a number-in the present invention the movable device and fixture information recognition general outline peripheral radar also are disclosed. Figure 6 shows a moving body using pushing-in the present invention is also fixed and magnetic recording general outline tracing a route number radar are disclosed. Figure 7 shows a shown illustratively the active radar amplifier also are disclosed. One embodiment example according to Figure 8 of the present invention anti-collision system line indicating block autonomous operators are disclosed. Hereinafter, with reference to the attached drawing detailed example of the present invention embodiment to less than 1000. In the present invention as well as described, publicly known or a function of the associated specific description the subject matter of invention can be described if a haze decided to omit other. Figure 2 shows a number-in the present invention is the general outline degrees and profit information using AIS also the neighborhood of the ship, the number using the AIS-in Figure 3 the present invention vessel within a setup range selection and movement path and grasp the general outline degrees, AIS-in Figure 4 the present invention is using the number line path overlapping ship sorting general outline autonomous operators are disclosed. In the present invention number that a radio line AIS automatically in automated equipment operators into a ship and navigation, using autonomous avoiding general outline AIS as follows. First, as shown in fig. 2, the neighborhood of the ship from AIS collects information about the substrate. Wherein, AIS (Automatic Identification System, automatic identification system device) is ship's position, to needle, such as navigation information to the device number tip speed between embodiment are disclosed. I.e., AIS is for preventing collision of the craft at on the sea as device, station number washing mechanism (IMO) and the propelled out option, automatic identification system (AIS) have been introduced device around the vessel from the control in the absence of a determination of the presence of alien progress which, when the needle sharpened to identifying such poor watch-like speed ship collision prevention, number wide tube, rescue ship search and structure activity such as safety management can be more effectively performed. Next, as shown in fig. 3, collected ship an established distance of ship location and path estimates. The, autonomous operators line reference distance within an acceptable range avoided is set, the time of receipt of the AIS seawater for locating the direction with the speed for considering position of player predicts a movement path according to estimates. Next, as shown in fig. 4, a method of selecting other autonomous operators line overlapping movement route on ships. Next, decodes the selected ship collision risk to bypass path number. Figure 5 shows a number-in the present invention is also movable device and fixture information recognition general outline degrees and peripheral radar, radar moving body using pushing-in Figure 6 the present invention is fixed and magnetic recording general outline degrees and tracing a route number, Figure 7 the active radar amplifier shown illustratively are disclosed. In the present invention number that a radio operators in general outline such as radar line determines that applying substrate. As shown in fig. 5, radar from the neighborhood of the fixture movable device and collects information about the substrate. Next, as shown in fig. 6, the fixture position and path collected autonomous vehicle and estimates. The, position of a mobile body by grasping movement along a path and speed radar receiving according to time the direction of movement of predicting path estimates. Next, a method of selecting other autonomous movement route operators line overlapping mobile object. Next, a collision risk path bypassing the selected autonomous vehicle and fixture number applies to. Wherein, when the expected collision situation shown in active radar amplifier (Active Radar Reflector) also 7 such as operating other. One embodiment example according to Figure 8 of the present invention anti-collision system line indicating block autonomous operators are disclosed. Thus, as shown in fig. 8, in the present invention number number number into an inside center or a remote autonomous traveling AIS and radar equipped with autonomous operators line is collision avoidance system (100) is, said AIS (110) collecting information from neighboring ship number 1 information collecting part (111) on, said number 1 information collecting part (111) collected at a set distance during ship operators () calculating said correlation path of ship self-revealed number 1 information calculating unit (113) on, said number 1 information calculating unit (113) collides with the correlation calculated in the ship's movement route available () a method of selecting information selection part number 1 (115) on, said radar (120) from the neighborhood of the movable device and fixture information collection information collecting number 2 (121) on, said number 2 information collecting part (121) collected at autonomous vehicle and calculating the fixture position path number 2 information calculating unit (123) on, said number 2 information calculating unit (123) collides with the correlation calculated in the autonomous vehicle and the fixture position path is available () a method of selecting information selection part number 2 (125) on, said barrel number center (200) on the transmitting communication unit (130) on, said number 1 and number 2 information screening part (115, 125) according to said ship, possible path to determine whether the movable device and cutting blade telephone line () collectively determining collides with integrated a judging section (140) on, and said integrated a judging section (140) the correlation signal () modifies the path of possible collision of multi-volume anti-collision reaction section (150) having a predetermined wavelength. In addition, integrated a judging section (140) is, AIS (110) movable device and vessel information obtained from said fixture by matching ship code, such as a displayable hereinafter ship number won by said communication unit (130) through said barrel number center (200) to transmit, said ship, to determine whether the user of a possible collision with the overall fund cutting blade movable device and produce a signal path. In addition, anti-collision reaction section (150) is, said integrated a judging section (140) possible collision of the correlation signal modifying path adjusting path (151) on, said integrated a judging section (140) decreases in accordance with the permission signal collision, alarm and active ray fraud (Active Radar Reflector) alarm operating an operating portion (153) having a predetermined wavelength. In addition, the autonomous operation or said autonomous operation program number which autonomous operators line number to the cylinder number by number by number at a remote center opposite travelling at a remote mode, the remote emergency situation can be mode number. As a result, in the present invention number that a radio operators into anti-collision system line (100) it relates to as follows. Number 1 information collecting part (111) is autonomous operators () revealed the correlation information for navigating around the neighborhood of the ship AIS (110) obtained from collecting substrate. The AIS (110) may be applied to a data communication system such as satellite communication equipment reduces communication equipment such as ship operators information number number won vessel code and other peripheral mounted on ships substrate. Number 1 information calculating unit (113) is number 1 information collecting part (111) collected at a set distance () revealed during ship operators to determine the position of the path and ship self-correlation. Wherein, autonomous operators line set reference distance within an acceptable range avoided, considering the direction with the time of receipt of the seawater for locating the position player AIS to speed according to the Image path such as path estimates. Number 1 information screening part (115) is number 1 information calculating unit (113) whether the correlation calculated in the ship's movement route () available ship collision is insulated electrically as a navigation method of selecting other. Number 2 information collecting part (121) is to radar (120) from the neighborhood of the fixture movable device and collects information about the substrate. The, radar signal conversion device (RSC) converted into data that can be use in the computer system by using the correlation data collect information about the movable device and elastic around 2000. Number 2 information calculating unit (123) is number 2 information collecting part (121) collected at autonomous vehicle and the fixture position to determine the path. Wherein, the changed position of the movable device and radar reception time by the fixture polarity direction with the path speed according to the Image path such as path estimates. Number 2 information selection unit (125) is number 2 information calculating unit (123) collides with the correlation calculated in the autonomous vehicle and the fixture position path is available () are transported to the substrate. Communication unit (130) includes a center barrel number (200) for transmitting system transmits information on the correlation number revealed autonomous operators () barrel center (200) number remote from the received data, GPS satellite information from a transmitting mode. Integrated a judging section (140) is number 1 and number 2 information screening part (115, 125) according to ship, it collides with the overall () to determine whether the movable device and cutting blade fund determines that other possible path. In addition, integrated a judging section (140) is AIS (110) movable device and vessel information obtained from said fixture by matching ship code, such as a displayable hereinafter ship number won by communication unit (130) through barrel number center (200) transmits, ship, to determine whether the user of a possible collision with the overall fund cutting blade movable device and produce a signal path. Integrated a judging section (140) (GPS) satellite number 1 and number 2 AIS and radar information using information obtained from screening part (115, 125) based on information obtained in the overall collision risk determines whether given situations. If collision is repeated when the collision possibility carry reaction section (150) a signal CLK3 impinging on the possible number. In addition, secured on the emergency number center (200) transmits the information. In addition, barrel receiving emergency number center (200) includes a second autonomous operation mode determines whether the remote whether number by responding to the system switch off so a judging section (140) transmits the signal. Integrated a judging section (140) is etched to a fund according to the judged result () number. Anti-collision reaction section (150) path adjusting (151) and alarm working part (153) and, integrated a judging section (140) the correlation signal () modifies the path of possible collision of alarm CLK3. Path adjusting (151) is integrated a judging section (140) according to the correlation path set permission signal collision of autonomous operation program modifying other. Alarm operating portion (153) is integrated a judging section (140) according to collision of permission signal decreases, alarm and active radar amplifier (Active Radar Reflector) white color substrate. The present invention refers to applying the active radar amplifier (Active Radar Reflector) autonomous operators line preventing the collision of alarm function diffuse to the efficient. With reference to, or decreases, conventional techniques such as alarm three detailed referred dispensed to each other. On the other hand, the operation program number autonomous operation or said cylinder number which autonomous operators line storage medium stores an opposite side by the remote number number number by the travelling at a mode at a remote center, the emergency situation can be delivered to the remote number. Thus, in the present invention number that a radio operators line into anti-collision system (100) as follows operation as follows. The correlation number 1 information for navigating around neighboring ship operators () revealed AIS autonomous from information collection unit (111) and collecting in, number 1 information collecting part (111) collected at a set position and path number 1 of ship operators () within a distance that is revealed during ship self-correlation information calculating unit (113) and calculated by a, number 1 information calculating unit (113) whether the correlation calculated in the ship's movement route () vessel number 1 is insulated electrically as a navigation available collision information screening part (115) reception alarm as follows. In addition, radar to (120) movable device and fixture information collection information from the neighborhood of the number 2 (121) and collecting in, number 2 information collecting part (121) collected at autonomous vehicle and the fixture position path number 2 information calculating unit (123) and calculated by a, number 2 information calculating unit (123) collides with the correlation calculated in the autonomous vehicle and the fixture position path number 2 () available information selection unit (125) reception alarm as follows. On the other hand, cylinder number center (200) for transmitting system transmits information on the correlation number revealed autonomous operators () barrel center (200) number remote from the received data, from a satellite GPS information to the communication system (130) contact with each other. Number 1 and number 2 information screening part (115, 125) according to ship, to determine whether the possible path collides with movable device and cutting blade telephone line () integrated a judging section (140) collectively in determining substrate. Wherein, integrated a judging section (140) is AIS (110) received from ship's information by matching fixture movable device and ship code, such as a displayable hereinafter ship number won by communication unit (130) through barrel number center (200) transmits, ship, collectively determine whether possible path collides with movable device and cutting blade the correlation signal are employed to generate, satellite (GPS) information obtained from the number 1 and number 2 AIS and radar using screening part (115, 125) based on information obtained in given situations and collision risk and collectively for determining, according to the judged result () decodes a number to the correlation. If collision preventing collision possibility is repeated when the reaction section (150) is impinging on the possible number generates signals, secured on the emergency number center (200) transmit information, barrel receiving emergency number center (200) includes a second autonomous operation mode determines whether the remote whether number by responding to the system switch off so a judging section (140) transmits the signal. The, integrated a judging section (140) in accordance with the permission signal collision of anti-collision reaction section (150) includes a path of fund () modifies the alarm CLK3. The, anti-collision reaction section (150) path adjusting (151) and alarm working part (153) and, path adjusting (151) is integrated a judging section (140) according to collision of autonomous operation program set permission signal correcting correlation path, alarm working part (153) is integrated a judging section (140) decreases in accordance with the permission signal collision, alarm and active radar amplifier (Active Radar Reflector) white color substrate. Wherein, alarm working part (153) is a the output of amplifier (Active Radar Reflector) active radar operators line preventing the collision alarm scheme for autonomous can be efficient. In addition, in the present invention number that a radio operators in that a radio operators or autonomous operation program operators line line collision avoidance system storage medium stores operation cylinder number center (200) to an opposite side by operators through the remote number by remote number can be placed in a mode, the mode number capable of remote emergency situation. Thus, in the present invention number that a radio operators line into anti-collision system involves the following effect can be expected. AIS and radar from ship, and a latch movable device and the collision danger by grasping and path is modified to avoid predicted...copyright 2001. In addition, number 1 and number 2 selection information based on the information obtained in deciding the overall integrated is placed according to the judged result () pin number pin is efficiently fund. In addition, judging section integrated operators line can be modified according to the autonomous collision of permission signal path can prevent collisions...copyright 2001. I.e., collision prevention system of the present invention vessel collision predicted path is modified to indicate marine practical and can be copyright 2001. In addition, a second autonomous operation mode the mode judging section integrated whether remote whether number only if the pin is selectively number again. In addition, operators line n free region is further autonomous sea, marine antifouling minimize loss and property is preventable disclosed. In addition, according to the present invention automatic line operators is capable of autonomous navigation, marine environment between automatic-detect even a risk zone embodiment can be stably tasks can be copyright 2001. Than, the detailed description of the invention in function of a specific embodiment example but, for embodiment of the present invention hereinafter and deformed by one skilled techniques most likely reduced, such modified embodiment examples of the present invention claim contained a feature are disclosed. 100: In the present invention is anti-collision system line number that a radio operators 110: AIS 111: Number 1 information collecting part 113: Number 1 information calculating unit 115: Number 1 information selection unit 120: Radar 121: Number 2 information collecting part 123: Number 2 information calculating unit 125: Number 2 information selection unit 130: Communication 140: Integrated a judging section 150: Anti-collision reaction The present invention relates to a collision avoidance system for an unmanned surface vehicle (USV), and more specifically, to a collision avoidance system for a USV capable of avoiding collision by efficiently sensing a ship or obstacles on sea in the USV autonomously sailing or remotely controlled. According to the present invention, the collision avoidance system for a USV autonomously sailing and equipped with an AIS and a radar comprises: a first information collection unit for collecting information on neighboring ships from the AIS; a first information calculation unit for calculating a path of a ship within a preset distance from one′s own ship among ships collected in the first information collection unit; a first information selection unit for selecting whether a moving path of the ship calculated in the first information calculation unit can collide with the one′s own ship; a second information collection unit for collecting information on a neighboring moving object and a fixed object from the radar; a second information calculation unit for calculating a location or a path of the moving object and the fixed object collected in the second information collection unit; a second information selection unit for selecting whether the path or the location of the moving object and the fixed object calculated in the second information calculation unit can collide with the one′s own ship; a comprehensive determination unit for collectively determining whether the ship, the moving object, and the fixed object according to the first and the second information selection unit are in a collision possible path with respect to the one′s own path; and a collision avoidance reaction unit for correcting the path of the one′s own path according to a collision possible signal of the comprehensive determination unit and generating an alarm. COPYRIGHT KIPO 2018 Cylinder number center or a remote autonomous traveling AIS number mounted in anti-collision system line is autonomous and radar operators, said barrel number center communication unit for transmitting, said AIS number 1 information collection unit for collecting information from the neighborhood of the ship, said number 1 information collecting part collected at a set distance during ship operators () calculating the path of said fund autonomous revealed number 1 information calculating unit and ship, said number 1 information calculation section () available ship movement route number 1 information selection unit selecting collides with the correlation, collecting information from said radar information collection number 2 and movable device and the neighborhood of the fixture, the fixture position calculating said number 2 information collecting part collected at autonomous vehicle and path number 2 information calculating unit and, said number 2 information calculation section autonomous vehicle and collides with the fixture path or position number 2 () available information selection unit selecting the correlation, said number 1 and number 2 information selection unit according to said ship, possible path to determine whether the movable device and cutting blade telephone line () collectively determining collision judging section and integrated, and the path of collision of said permission signal () modifies the correlation judging section integrated multi-volume preventing collision and reacting section, said anti-collision reactor, said integrated circuit is provided with a path for modifying the correlation path according to the permission signal judging section collision, collision of said permission signal decreases according to judging section integrated, fraud alarm and active ray operating and transmits said alarm actuating portion, said integrated determiner determines, by matching said information received from said AIS ship fixture movable device and ship code, such as by ship number won through the barrel number and said transmitting said displayable hereinafter, said ship, to determine whether the user of a possible path collides with telephone line cutting blade movable device and for generating a signal that a radio operators line comprehensive characterized anti-collision system. According to Claim 1, autonomous operation program operation or said number to said autonomous operators line number by which the number by number at a remote autonomous opposite the center barrel remote number travelling at a mode, the mode can be switched to emergency situation characterized that a radio remote number operators line collision avoidance system.