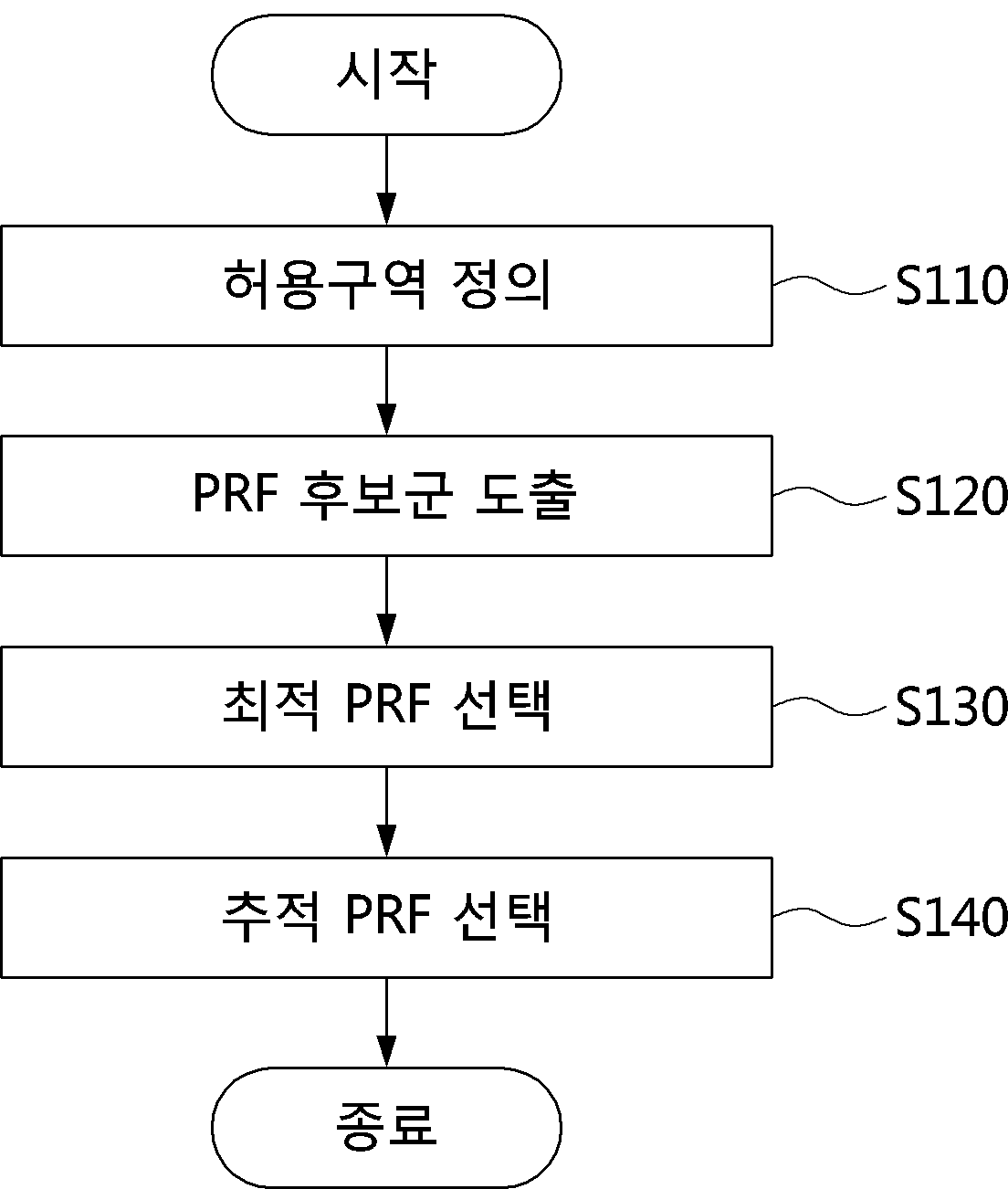
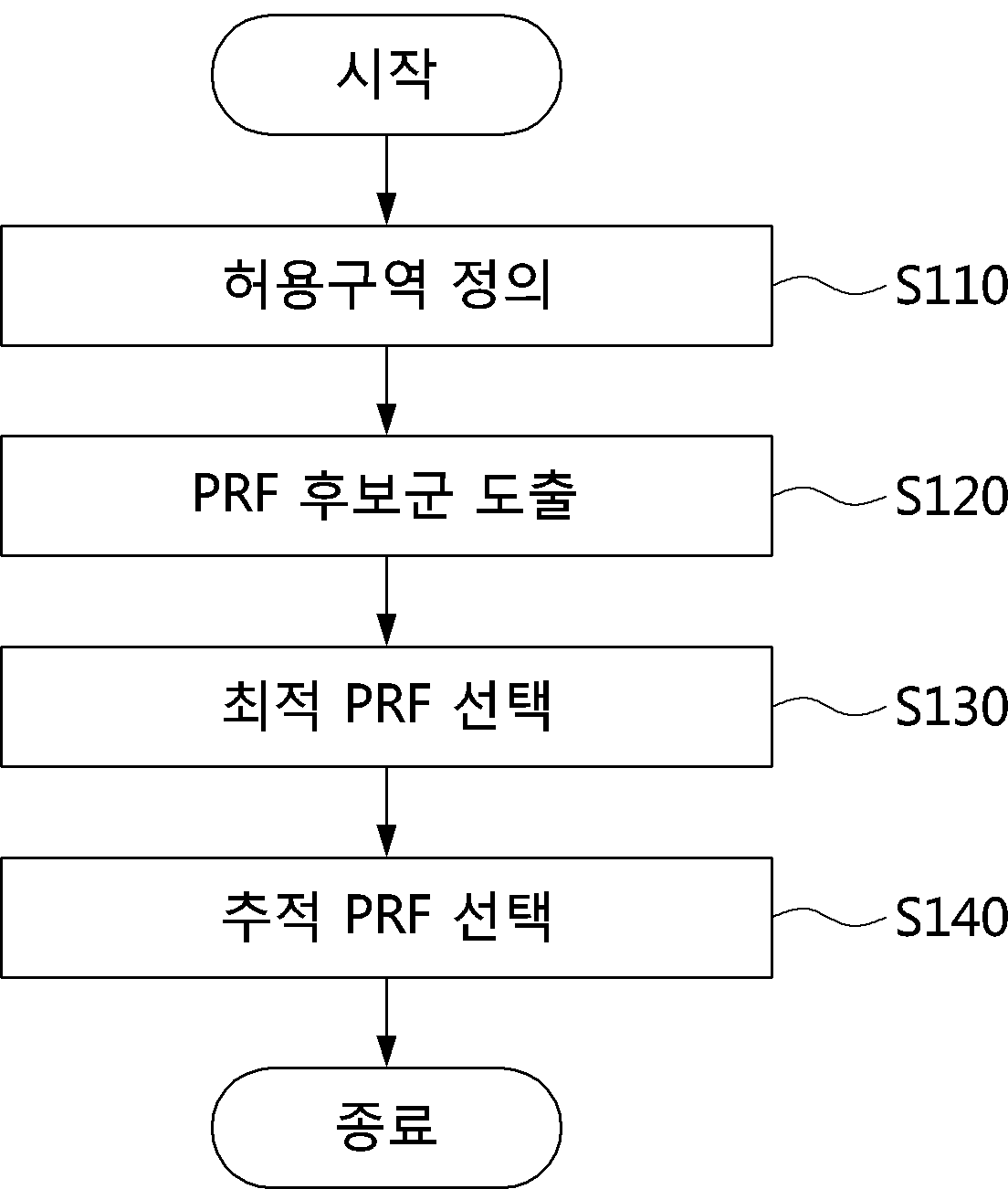
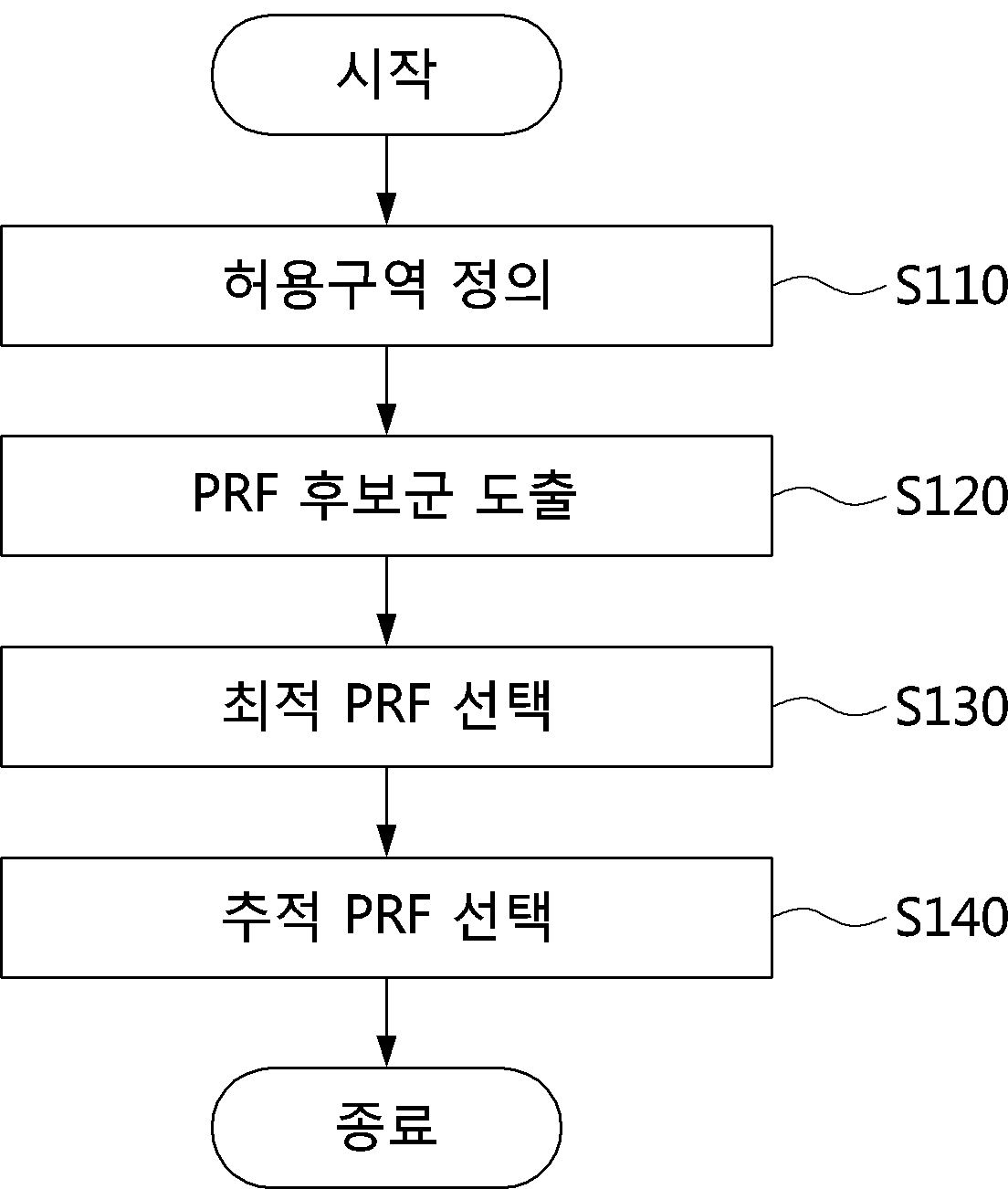
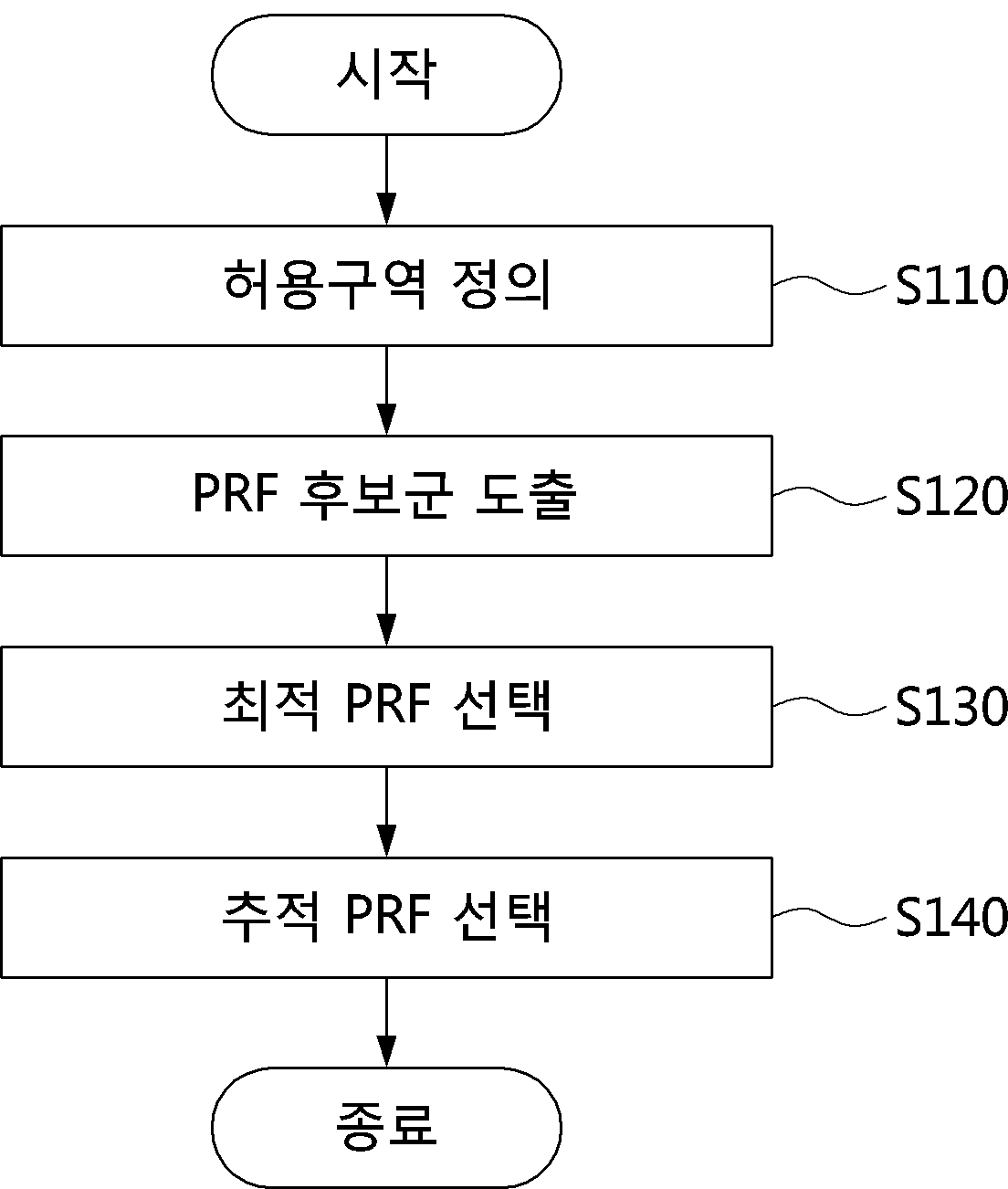
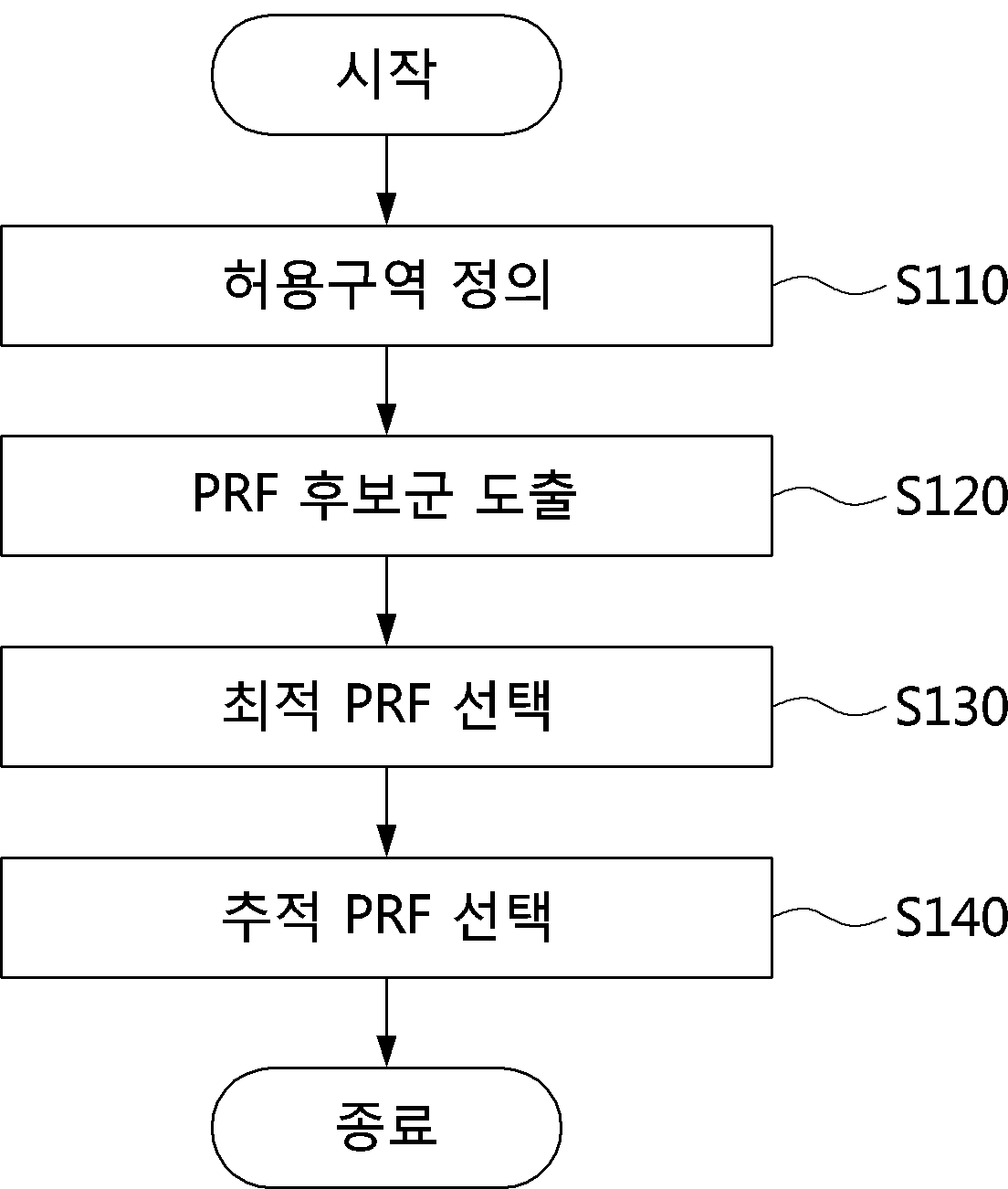
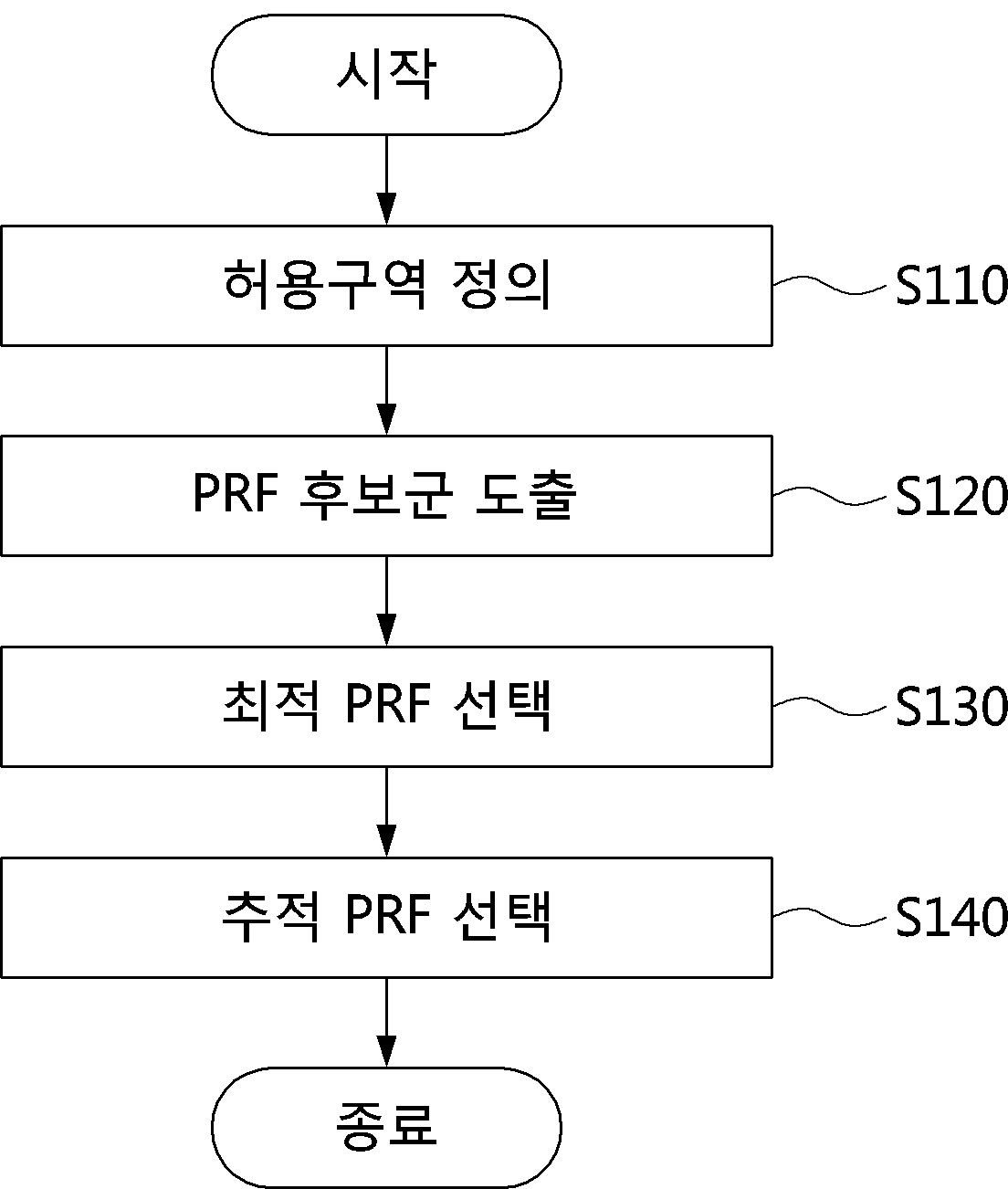
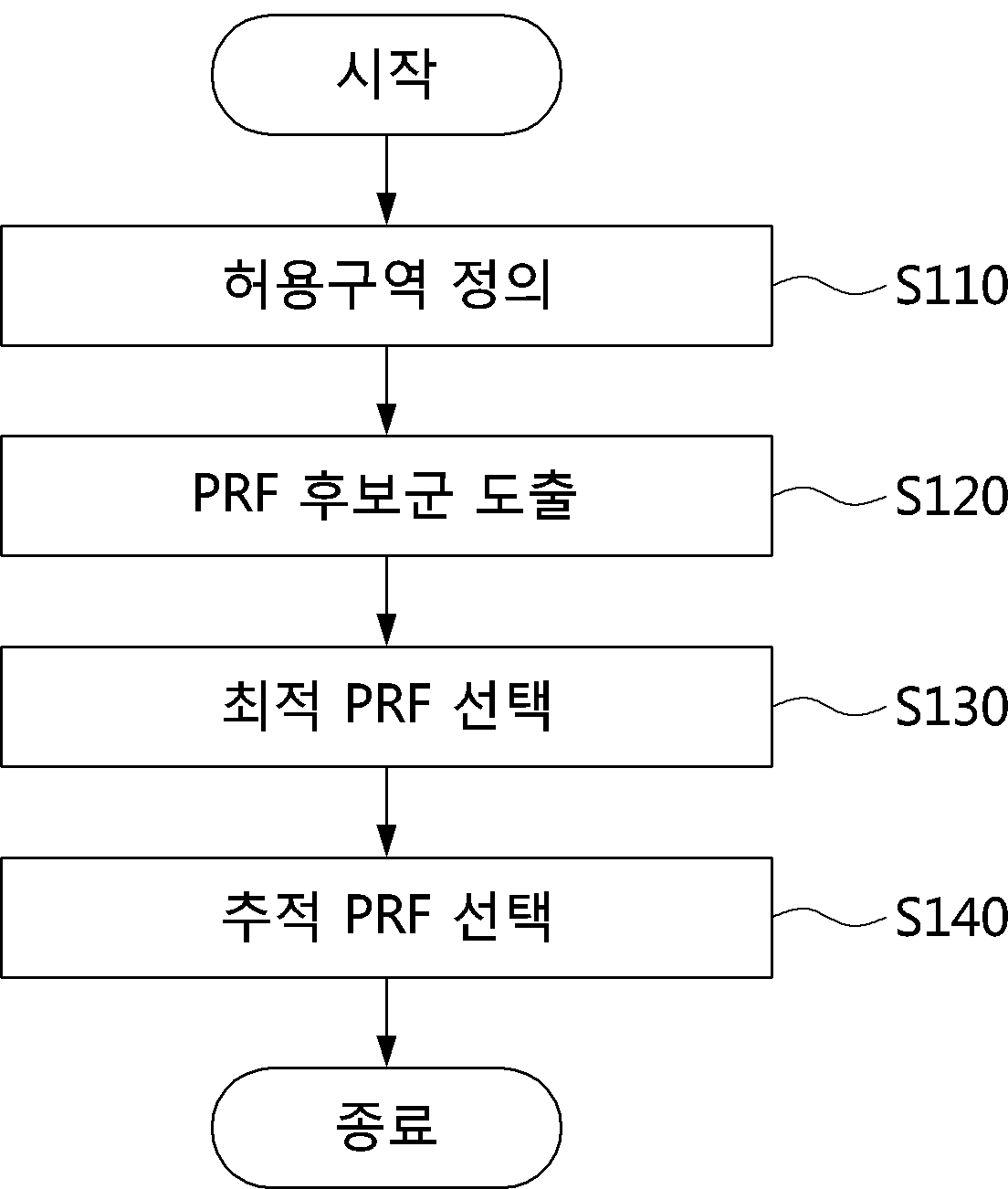
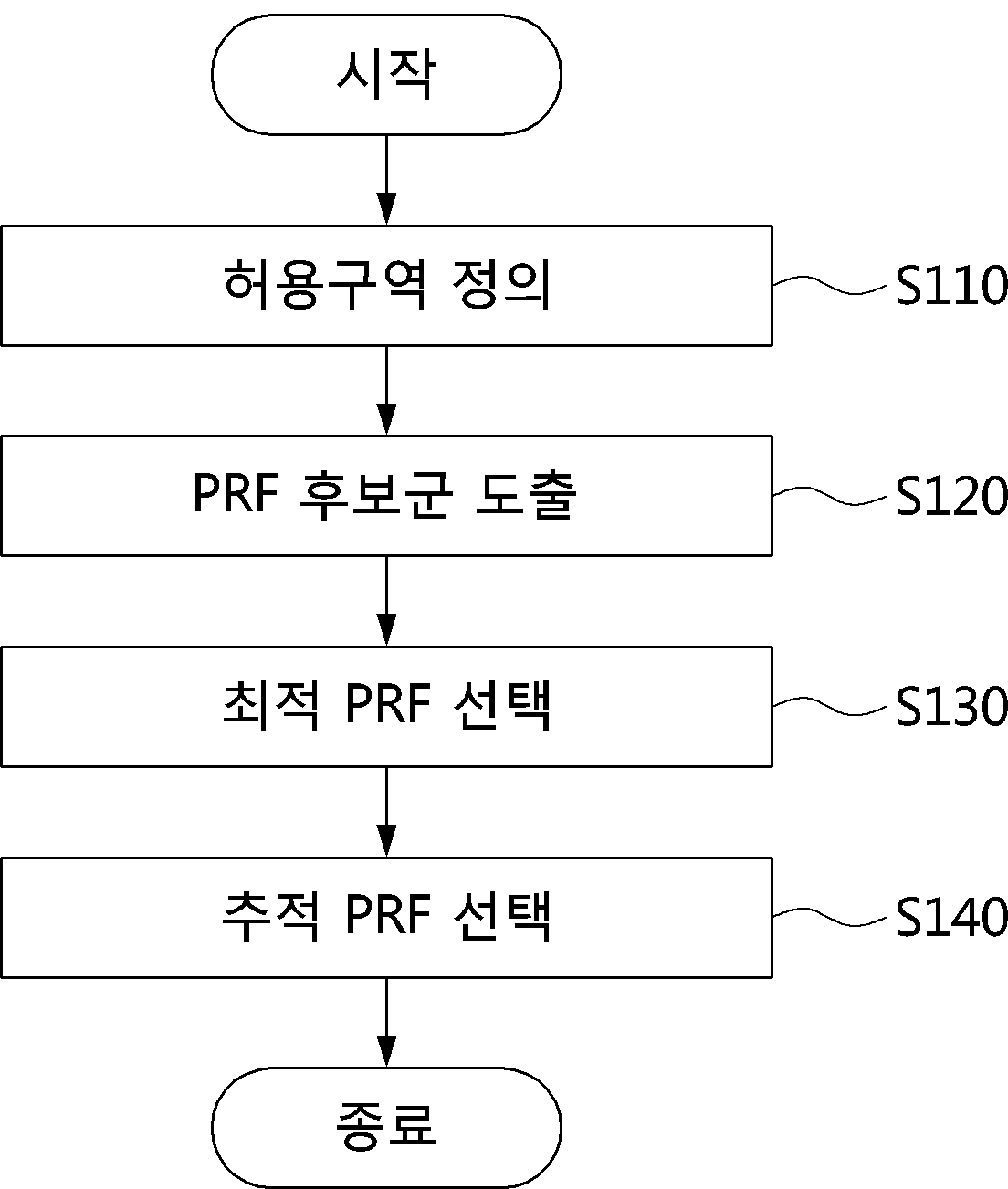
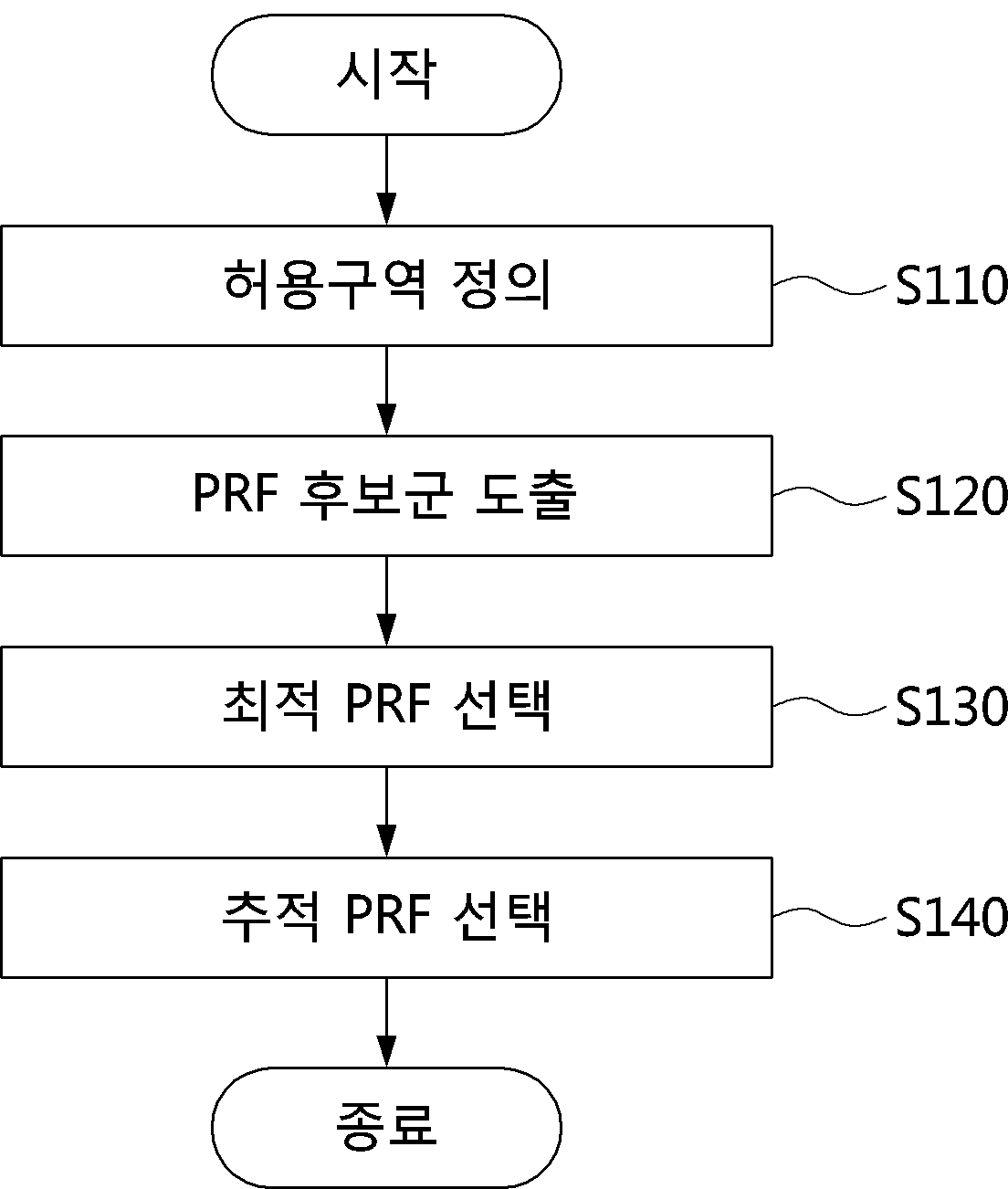
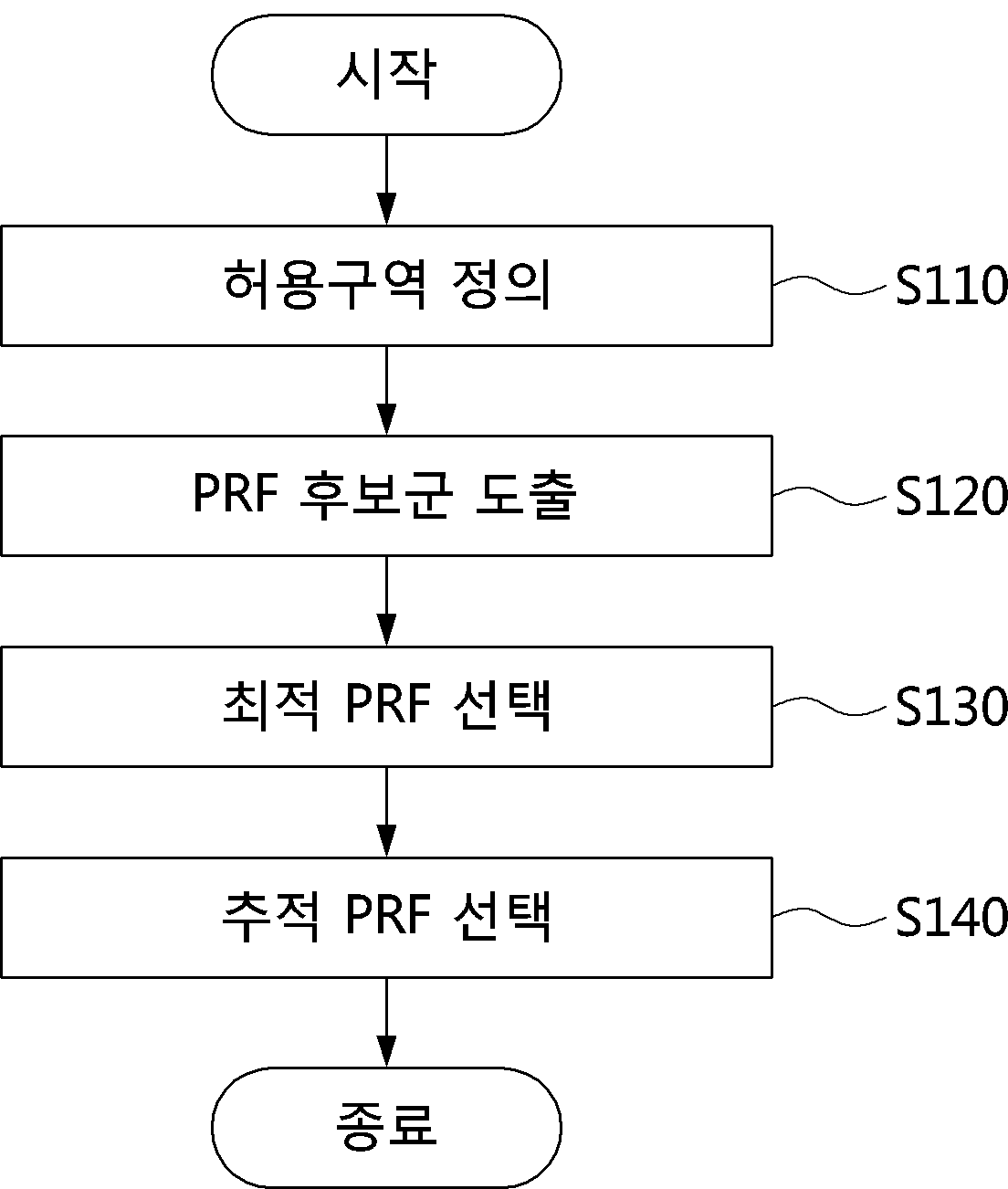
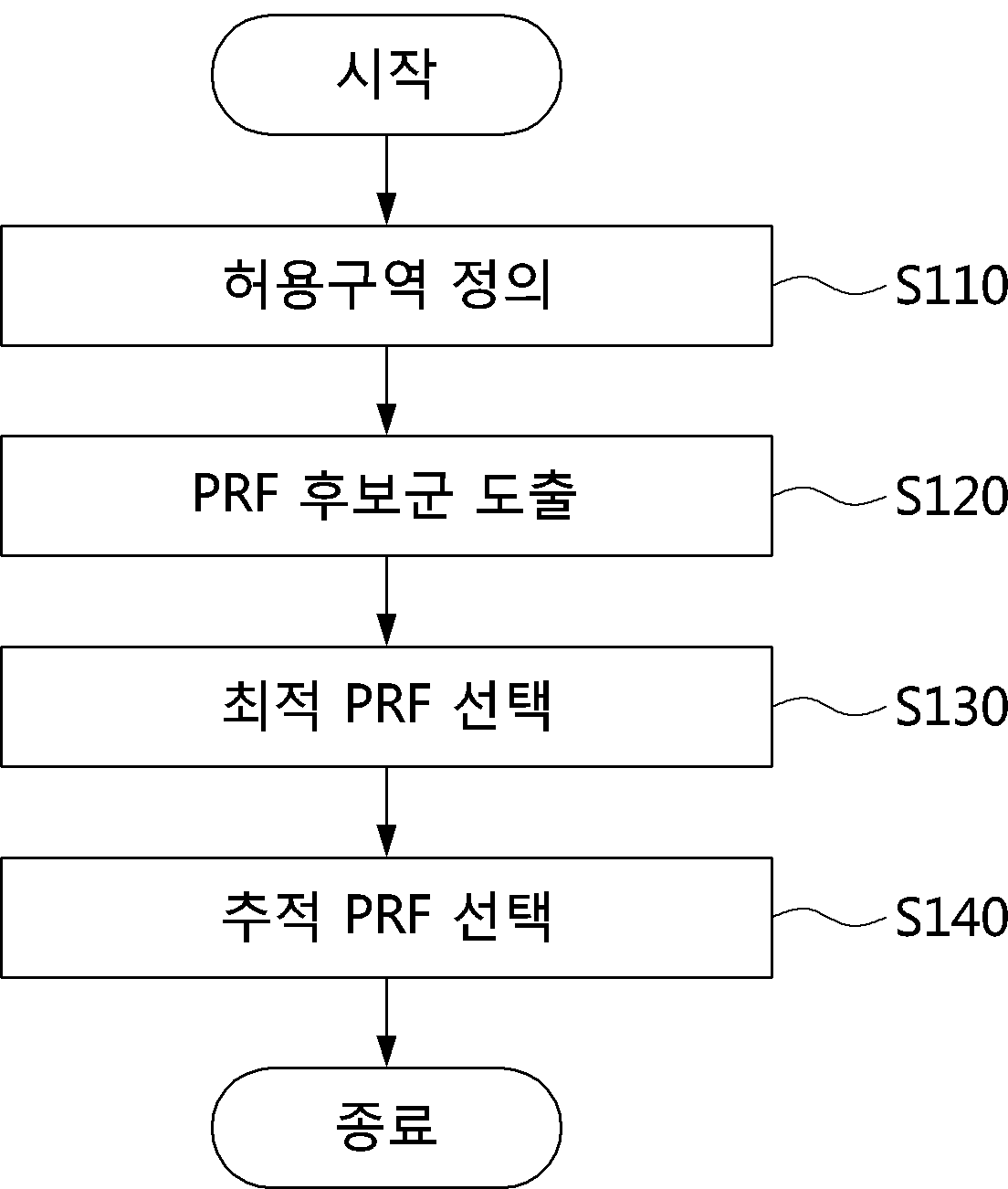
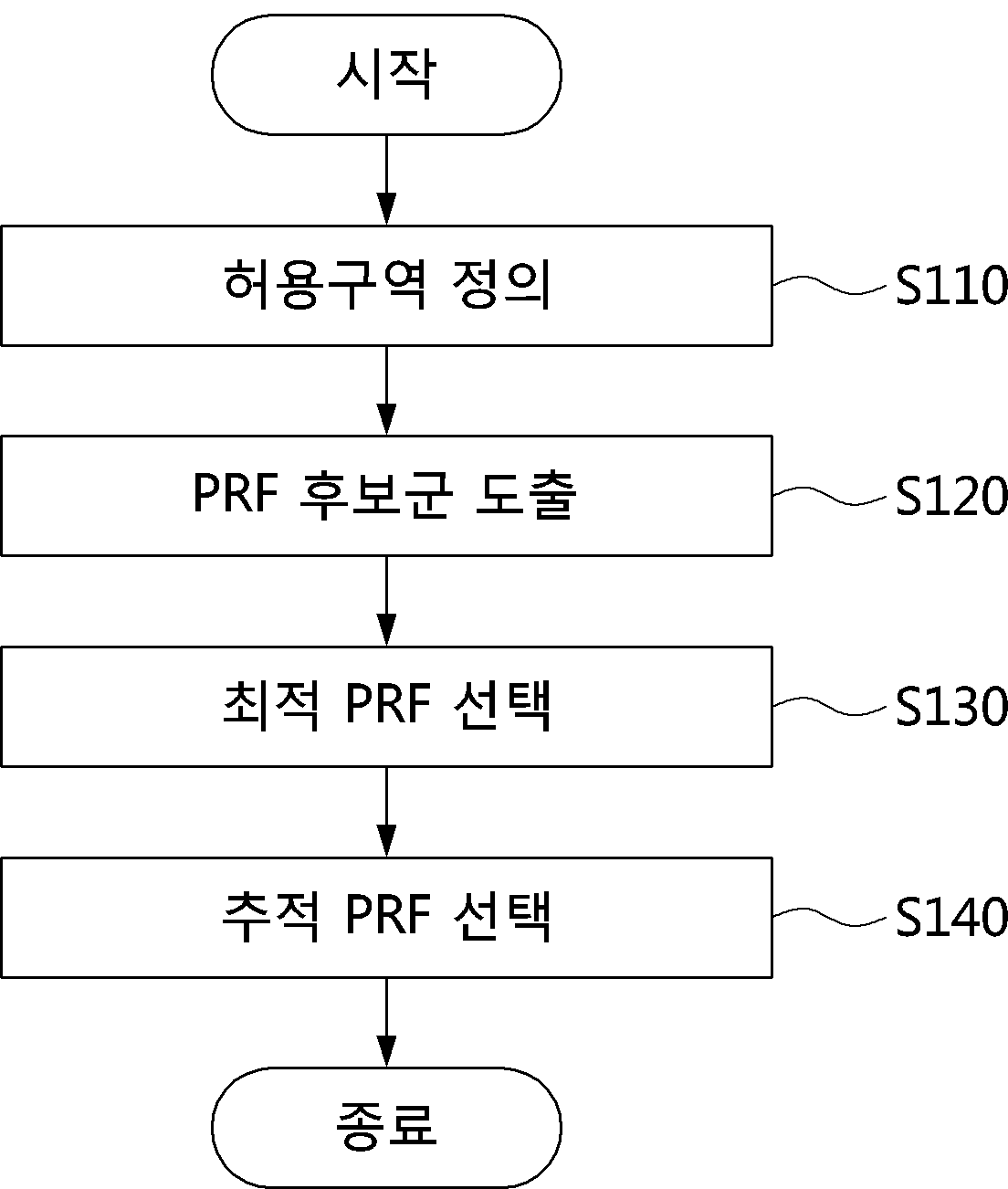
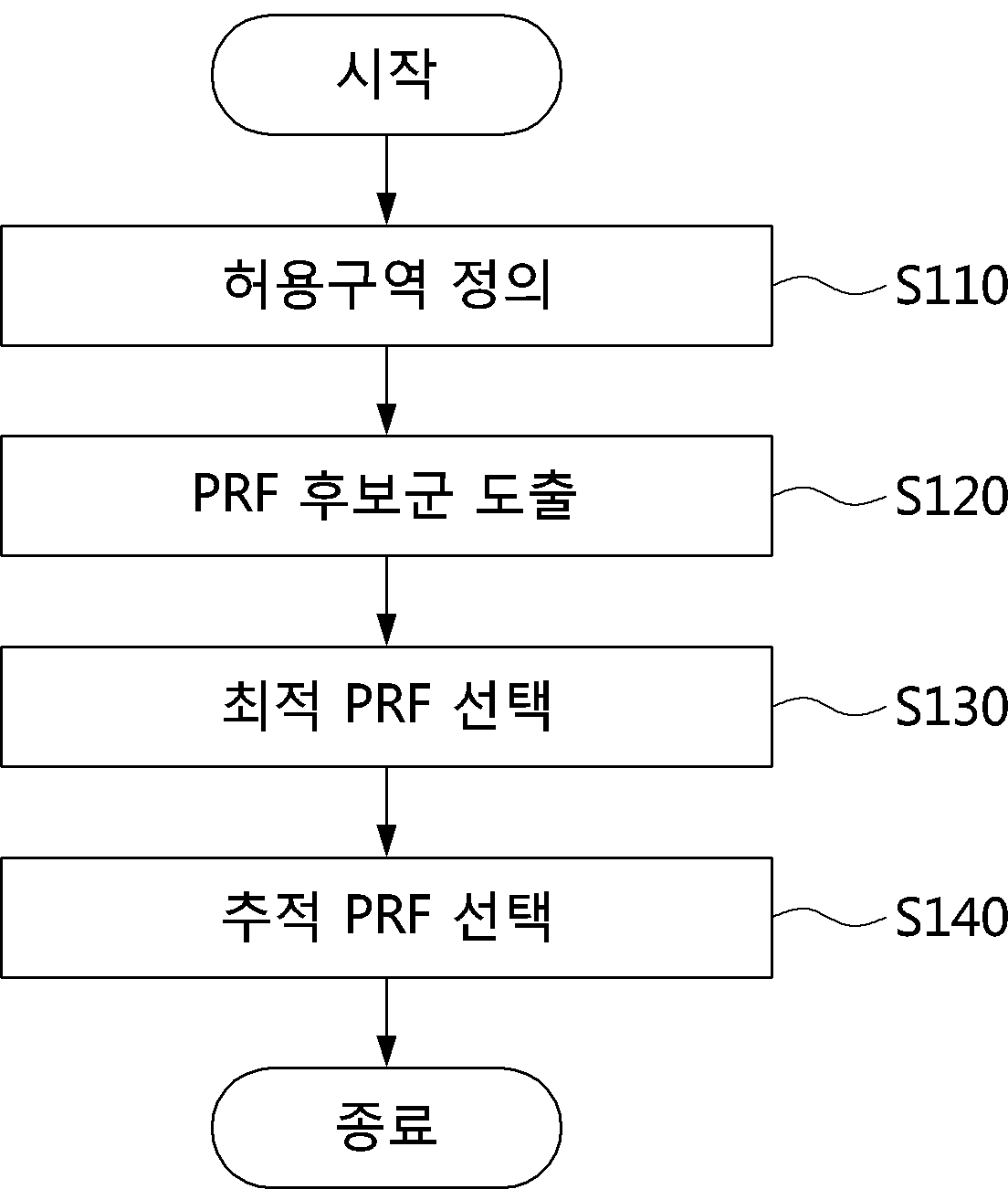
항공기 레이더에서 MPRF 모드의 추적 PRF 선택 방법 및 이를 이용한 항공기 레이더
In the present invention refers to method relates to airplane using radar and radar tracking of the PRF MPRF mode selected aircraft, specifically aircraft radar clutter region in (blind region) to assign a target is not located in a position corresponding to an altitude of aircraft, avoiding blind region PRF of PRF candidate from the group consisting of select, using the same according to a PRF for selecting continuous target tracking, MPRF mode tracking radar and aircraft radar in airplane using PRF selection method are disclosed. Aircraft radar target to emit or detect track, the pulse repetition frequency (Pulse Repetition Frequency: PRF, varied "PRF" hereinafter) can be know target cell through the use maximum detection distance. The selection of radar in design are important for PRF, low pulse repetition frequency (Low Pulse Repetition Frequency: LPRF), medium pulse repetition frequency (Medium Pulse Repetition Frequency: MPRF, varied "MPRF" hereinafter), high pulse repetition frequency (High Pulse Repetition Frequency: HPRF) to Chapters. If pulse repetition period using aircraft radar search mode in LPRF (Pulse Repetition Interval: PRI, multi-hereinafter "PRI") hole without ambiguity distance but, due to the small PRF Doppler ambiguity exists other. The MPRF is used both distance and Doppler ambiguity exists other. Then ambiguity than the clutter (cluter) or other targets so that distinguish ambiguous, ambiguous non-uniform distances and speed calculating important disclosed. However, unlike the search mode on operating waveform when tracking filter from the prediction of the target distance and speed tracking can be ambiguous because non-uniform distances and speed without requiring the computation. I.e., current distance and speed of the target and can know the distance and speed can be predicting when the next. Only, of the target signal is clutter, eclipse (eclipse), such as a false target which do not overlap selecting PRF is important to ensure that disclosed. Engagement in situations when a target with altitude of aircraft relative length, to vibrator beam main lobe (main lobe) of the target signal is clutter and significantly due to the clutter signal superimposed, clutter region completely outside of the PRF selects limit flow tides. Furthermore, in order to select the engagement situation should be taken into account in the PRF conditions clutter, eclipse (eclipse), such as a false target ambiguity payment plan other. The other signals superimposed on the ambiguity of the target signal and at high speed region is referred to as blind region (blind zone), which has a region (clear zone) suitable for a clear region ambiguity and vice versa. The, operating waveform when clear region to target tracking invasion PRF technology not select number needs to be disclosed. The purpose of the invention in aircraft radar clutter region (blind region) to assign a target is not located in a position corresponding to an altitude of aircraft, avoiding blind region PRF of PRF candidate from the group consisting of select, using the same according to a PRF for selecting continuous target tracking, MPRF mode selection method and PRF in aircraft radar tracking radar airplane using number 30 to 60 seconds. In the method according to one embodiment of the invention the aircraft radar tracking of the PRF MPRF mode selected, clear region (clear zone) for tracking and Doppler (doppler) then the one expected in target distance (range) in defining the permissible region; said Doppler region defined distances to the permissible region in common number PRI satisfying conditions (Pulse Repetition Interval) and PRF (Pulse Repetition Frequency) deriving a candidate group; said PRF candidate from the group consisting of thickening of the permissible region nearest PRF candidates for selecting said optimal PRF step; and said optimum distance based on the speed of the PRF selected target distance region satisfying conditions common in Doppler tracking number selecting PRF; can be a. Said selecting step includes tracking PRF, second tracking target distance and speed according to tracking data verifying the predicted k; second tracking of the target range and velocity estimating expected k + 1, said k expected second tracking of the target tracking data using the second tracking said k + 1; said k + 1 predicted position of said target in the area of the second tracking allows confirming whether; and said second tracking of the target tracking data along said k + 1 expected to charge the second tracking said k expected according to the steps of the target tracking data; can be a. According to one in the embodiment, said predicted position of said target along said k + 1 to charge the second tracking on determining if a distance falls below a permissible region; said second tracking current PRI empty (bin) according to the judged result by adjusting the position of said k + 1 in the area of acceptable confirming whether said predicted target; and said determination result in said adjusted according to the signal from said current PRI bins to adjust water content and again all permissible region, said region in said peripheral permissible region again allow searching all Doppler; can be further comprises. Said acceptable interval has, in clutter is empty bin distance PRI, empty altitude of aircraft, the data of the tracks, can be determined such that an upper threshold on an upper end by target distance bins. Said acceptable interval has, on an upper end by PRI bin the target Doppler frequency sampling time Doppler region can be determined such that an upper threshold. PRF is said PRF candidate group, the reciprocal of the PRI can be represented. In addition, the aircraft radar according to one embodiment of the invention, aircraft radar as, at least one or more process; and computer readable memory for storing instructions; wherein, said instructions, when executed by said at least one processor, causes said process, clear region are predicted on the target for tracking and a Doppler-distance in the area defining the permissible region, said Doppler region defined distances to the permissible region in common number satisfying conditions derive PRI and PRF and candidate group, said group consisting of said PRF candidate point of the permissible region nearest PRF candidates by selecting optimum PRF, said optimum distance based on the speed of the PRF selected target distance region number satisfying conditions common in Doppler tracking comprising selecting PRF can be. Said process, said tracking when selecting PRF, second tracking target distance and speed according to predicted k identifying tracking data, second tracking of the target range and velocity estimating expected k + 1, second tracking of the target tracking data for use in said k expected second tracking said k + 1, said k + 1 are in fact within the permissible region said second tracking the location of an area in which the expected target, said k + 1 along said second tracking of the target tracking data expected to charge the second tracking of the target tracking data comprising said k according to can be expected. Said process, said predicted position of said target along said k + 1 to charge the second tracking distance falls below a permissible region on condition, said second tracking current PRI empty (bin) according to the judged result by adjusting the position of said said k + 1 are in fact within the permissible region in which the expected target, to charge the distance along said zone in said out again adjusted to adjust water content and allow current PRI bins, said zone being a permissible region around said out again allow Doppler region can include disclosed. In addition, the computer-readable program according to one embodiment of the invention as a storage medium, said program, clear region (clear zone) for tracking and Doppler (doppler) then the one expected in target distance (range) in defining the permissible region; said common number in Doppler region defined distances to the permissible region satisfying conditions (Pulse Repetition Interval) and PRF PRI (Pulse Repetition Frequency) deriving a candidate group; said PRF candidate from the group consisting of thickening of the permissible region nearest PRF candidates for selecting said optimal PRF step; and said optimum distance based on the speed of the PRF selected target distance region satisfying conditions common in Doppler tracking number selecting PRF; can be a. In the present invention refers to aircraft radar clutter region (blind region) to assign a target is not located in a position corresponding to an altitude of aircraft, avoiding blind region PRF of PRF candidate from the group consisting of select, using the same PRF tracking can be sustained radar according to select. In addition, the present invention refers to tracking target operating waveform when clear region to PRF invasion can be selected. Figure 1 shows a tracking mode selection method according to one embodiment of the invention MPRF PRF therefore face, 2A is also optimal in target location on a map drawing indicating RD PRF (Range-a Doppler), In describing drawing 2b Z is also permissible region, In describing the permissible region also 2c Doppler is drawing, Figure 3 shows a map for describing the 2 dimensional RD 2b and 2c also said also, Figure 4 shows a face tracking PRF method therefore selected according to one embodiment of the invention, Figure 5 shows a target according to the distance between the radar and aircraft also time indicating a change in the surface, Figure 6 shows a time variation also according to PRI bin side, Figure 7 shows a time variation according to PRF also surface, Figure 8 shows a time also according to n, m surface variation, Also 9a to 9c is a drawing indicating a change in the map as a matter of RD target location also are disclosed. The present invention appends a sufficiently in order to understand of the present invention preferred embodiment drawing through a browser substrate. Is of the present invention in the embodiment can be modified in various forms, in the embodiment of the present invention describing downwardly comprise range is defined as an interpreted don't substrate. In the embodiment to the present invention with average knowledge in the art is the entire surface to account for power is applied ball number are disclosed. The drawing more clear description element in a shape or the like can be expressed in exaggerated parameter inputted by a user. Each drawing the same member when accomplishing the same references illustrated as a significantly to the second. The subject matter of invention can be decided to be breach of haze publicly known techniques detailed function and configuration to the first substrate. Figure 1 shows a face tracking mode according to one embodiment of the invention MPRF PRF selection method therefore are disclosed. The method according to one embodiment of the invention MPRF PRF tracking mode is selected, in aircraft radar clutter region (blind region) to assign a target is not located in a position corresponding to an altitude of aircraft, avoiding blind region PRF of PRF candidate from the group consisting of select, using the same PRF tracking can be sustained radar according to select. As shown in fig. 1, tracking of the PRF MPRF mode method is selected, the permissible region defining step (S110), step (S120) derived PRF candidate group, optimum PRF selection step (S130), tracking PRF selection step (S140) without using a tool. To this end, at least one process radar aircraft, comprising a memory for storing computer-readable instructions. First, a plurality of hierarchies (S110) radar aircraft permissible region defining step. I.e., the permissible region defining step (S110) is then the one expected in clearance region for tracking target distance (range) in the permissible region (allowable zone) and Doppler (doppler) (or speed) defining other. Wherein, the permissible region distance and transmit a set number for each Doppler region bogie ambiguous gives the target not defined. An integer number of folded (folding) of the target distance and speed PRI PRF and enhance clear the splice can comprise ambiguous near uninhabitable. To this end, the permissible region as follows distance Doppler region number transmit lines are deleted. On the other hand, refers to the case 2a and also to transmit a telephone number also distance regions such as 2c [expressions 1] lines are deleted. 2A is also optimal in drawing and target location on a map indicating RD PRF (Range-a Doppler), drawing describing the permissible region in Z is also 2b are disclosed. Wherein, according to the sampling time or other N empty (bin) are disclosed. In other words, bin includes a number representation is divided into every predetermined time sampling distance is provided, can be the distance resolution. Wherein the meanings of said 1 parameter expressions as follows. Nc The effects of clutter is predicted clutter distance bins representing areas and exhibits. Thus it is important for the region corresponding to the local distance clutter section number conditions are disclosed. Nc Is e.g., be a bin 21. In addition, Nt Target distance bins is predicted by a goniophotometer. In addition, NHeight The altitude of aircraft exhibits distance bins. The 2a also reference, corresponding to the altitude of aircraft distance bin previous zone clear area can be know. NHeight Is e.g., be a bin 104. In addition, NExt The convenience is signal processing exhibits distance bins. Wherein, signal processing window processing, be a CFAR (Constant False Alarm Rate) treatment. NExt Is e.g., be a bin 20. Expressions such as said 1, folded n times in distance used for entering empty PRI (NPRI ) N signal for processingExt Since by and for the extra distance bins, Nt N sinceHeight - NExt In one previous number should be other. The 2b also can be shown for the leaves. The temperature detector, Nt Can be a tracking waveform can know through the, distance of the target to clogging in folded n times Nt - N, NPRI The, ground clutter, altitude of aircraft, and on an upper end by a lower limit the c1. extra PRI bins. With reference to, the aforementioned Nt 2 And 3 can be known through to the expressions. Wherein, RTarget Is predicted represents radar, RBin According to one sampling time-interval distance by a goniophotometer. RTarget For example, 35 km and, RBin For example, 47. 952M implementation being. C is a luminous flux (2. 997 × 108 M/s) and, tSub Sampling time are disclosed. tSub Is e.g., 320ns are disclosed. On the other hand, expressions in said 1 distance satisfying PRI expressions such as 4 to 30 parts by weight can be deleted. I.e., 4 in PRI satisfying expressions such as distance can be determined. In addition, the PRF and PRI expressions 5 has an effect on a relationship, the equation can be satisfying PRI PRF through distance region. And, with reference to the case 2c also transmit a Doppler region number lines are deleted as follows. 2C is drawing in describing the permissible region Doppler also are disclosed. For the clear area may be changed but RD clutter map situation, generally Not clear near can be known. The, transmit a Doppler region case number Setting a permissible region preferably is not appropriately margin. Here a permissible region When set home through a browser substrate. The, case number 6 to transmit a Doppler region 2c also refers to the expressions such as lines are deleted. Wherein, fv Exhibit a Doppler frequency of the target is predicted, and expressions 7 to such as disclosed. The target Doppler frequency fv The eggs can be a tracking waveform can be through. Wherein, vTarget Is predicted and target speed, is wavelength λ are disclosed. vTarget For example, 600 m/s are disclosed. Said expressions such as 6, once folded target f m in incoming Dopplerv - M, PRF is a lower limit and an upper limit of the cross lines are deleted. On the other hand, said expressions satisfying said expressions 6 is 5 to 30 parts by weight PRI expressions such as Doppler region according 8 can be deleted. Next, a plurality of hierarchies (S120) aircraft radar PRF candidate group deriving step. I.e., derived in said step (S120) and PRF candidate group Z is a expressions 4 and 8 N DopplerPRI The deleted for common PRI candidate group satisfying and lead the PRF. I.e., the PRF (S120) is to organize his expressions 4 and 8 said candidate group deriving step, in which the PRF in Epon target predicted allow candidate group can be derived. Specifically, fixing the folded n times distance region, said common expressions 4 and 8 N satisfyingPRI Within the range of m can be obtained. Wherein, integer n can be determined from the maximum detection distance range of radar. Through, a [n, m] set can be obtained. In respect of the expressions which has a 9, 9 to 10 m and expressions and expressions such as a flavor thereto disclosed. For example, 35 km as a predicted speed of 600 m/s in which a remote target, the condition number one Nc =42, NExt =50, NHeight =104 when home when permissible region such as narrow, folded n times a number from 1 to 4 the valve timing of the distance region 4 to the [n, m] obtained increase possible while set by solar heat, [2, 2], [3, 1], [4, 1] are disclosed. The, N for respective setPRI Range can be obtained. If, unless there is not common PRI and PRF is next set going to other. In this way, drying [n, m] indicating the number of times a target responsive to the set of candidate checked PRF present. Next, optimum aircraft radar PRF selection step operation done (S130). I.e., optimum PRF selection step (S130) Z is region a common number N Doppler region satisfying conditionsPRI If found, to be obtained by optimum candidate PRF selects from the group consisting of PRF. Here PRF candidate from the group consisting of thickening of the permissible region nearest PRF PRF selected candidate to optimal. This permissible region (optimal point) and if it is found not corresponding to near center of generalizations can be ambiguous PRF are disclosed. Also in respect of the pivotably on a metal thin film 3. Figure 3 shows a map for describing the 2 dimensional RD 2b and 2c also said also are disclosed. The reference also 3, clear for viewing the permissible region (AZ) in target is defined. In addition, candidate number 1 (1), number 2 candidate (2), candidate number 3 (3) in, PRF candidate group (AZ) permissible region not included in the candidate number 1 (1) is outside and number, candidate number 2 (2) on the candidate number 3 (3) can be selected. (AZ) (OP) on PRF closest to the center of permissible region candidate PRF from the group consisting of number 2 is a candidate candidate (2) PRF selected to optimal. Next, aircraft tracking radar PRF selection step operation done (S140). I.e., tracking PRF selection step (S140) of the target velocity and distance based on the selected optimal PRF distance region in common number satisfying conditions according to Doppler tracking PRF selects. This taking into account the situation data from which the target from the second optimum PRF are disclosed. Tracking PRF selection step (S140) of the target is folded [n, m] Doppler region according to velocity and distance distance region from 1 to a predetermined number of times set entire need to be free. From the prediction of the target distance and speed to the end of the tracking filter tracking waveform are disclosed. I.e., second tracking of the target tracking data expected current k (NPRI (k) , N(K) , M(K) ) Receive a next t seconds after second tracking of the target tracking data to expected k + 1 are used. Second tracking of the target tracking data for optimal expected current k PRF can be applying tracking data. The reference also 4 for the detailed to explain less than 1000. Figure 4 shows a face tracking PRF selection method according to one embodiment of the invention therefore are disclosed. First, second tracking radar distance and speed of the target aircraft expected k identifying other (S141) according to tracking data. I.e., second tracking target distance r k predicted current(K) A remote speed v(K) And as a predicted, the tracer data (NPRI (k) , N(K) , M(K) ) Are disclosed. Then, second tracking radar aircraft expected target distance r k + 1'(K + 1) And a speed v '(K + 1) Estimating, k expected second tracking of the target tracking data (NPRI (k) , N(K) , M(K) ) K + 1 a second tracking method uses (S142). Then, a default k radar aircraft second tracking data (NPRI (k) , N(K) , M(K) ) Of t seconds using the target (second tracking k + 1) in the area of the map as a matter of confirming whether each of the other (S143) allow RD. The, aircraft radar map coat RD is present in the target location within the permissible region (S143), k (S144) holds the second tracking of the target tracking data as expected. I.e., aircraft radar tracking of the target tracking data expected k + 1 second k expected second tracking of the target tracking data set to each other. While, in the area of the target location is RD allow aircraft radar map coat without fall onto the distance the permissible region (S145), in N current PRI binPRI (k) In the area of acceptable one reduce regulated so as to permit each other (S146). In addition, in the area of the target location is RD allow aircraft radar map coat without distance permissible region onto (S143) is exceeded, in N current PRI binPRI (k) An acceptable increase in the area of one regulated so as to permit each other (S147). The NPRI (k) If permissible region even in a region outside the Doppler adjusting disapproval. Thus, aircraft radar target location is in fact within the permissible region map coat RD message other (S148). In this case does not allow the target location is in the area of the map coat RD, distance region or Doppler region when the out-of charge applying substrate. First, in the permissible region is used to obtain a radar distance aircraft, in N current PRI binPRI (k) Adjusting a again has a plurality of hierarchies (S145). Next, in the permissible region is used to obtain a Doppler radar aircraft, searching process has a plurality of hierarchies (S149) RD map coat peripheral permissible region again. Specifically, aircraft radar for target distance and speed of t seconds, indicating the number of times a [n, m] is folded target set of peripheral extension [n(K) ± 2, m(K) ± 2] per set an optimum N correspondingPRI After deriving and storing, in a second PRI bin k + 1 N PRI bin nearest point of the permissible regionPRI (k + 1) To selects. Wherein, corresponding n, m is [n(K + 1) , M(K + 1) ] Set is under or over. Next, when the target location is within the permissible region RD aircraft radar map coat (S148), second tracking of the target tracking data expected in N kPRI (k) Adjusting a second tracking of the target tracking data expected k + 1 set other (S141). Hereinafter, MATLAB simulation of the present invention is described through verification process to less than 1000. Here displayed in substantially constant relative speed to 600 m/s at a distance below the current target 35 km away from his home scenario uprights. Current target aircraft radar distance differences is' R0 'When, t seconds of target aircraft radar distance' R (t)' is' R0 - V * t ' can be represented. Figure 5 shows a time indicating a change in the aircraft radar target according to the distance between the surface also are disclosed. Figure 5 40 seconds in all cases, the distance between the target and aircraft radar shown over time. In addition, relative velocity is not possible with the acronym, unchanged but Doppler frequency of the target, the distance between the target and aircraft radar 'R (t)' of the target distance according to empty ' Nt ' Angles such as S. 11 is varying. Wherein, RBin According to one sampling time by big non-spacing distance. In N PRI bin over timePRI , PRF, n, m in fig. 6 to 8 respectively indicative of a change such as disclosed. Figure 6 shows a time variation and also according to PRI bin a drawing, which drawing indicating time according to PRF of Figure 7, Figure 8 time according to n, m surface variation are disclosed. In this case distance changed and the number of times a constant number of times Doppler region folded region is folded, in N PRI bin over timePRI Molecules can be significantly increased. On PFR PRI exhibits reverse relationship with each other. Also 9a to 9c is a drawing indicating a change in the map as a matter of RD target location also are disclosed. Also in Figure 7 N 9a to 9c is alsoPRI In RD (t=16 - 18) exhibits a first change in position of the target map as a matter of rise in section. In addition, a thread number 9a to 9c is also tracking of the target information in the waveforms also new PRF not applying a installing the PRF even when it is possible to simultaneously ambiguous amplifiers can be know to the subsequent tracking. I.e., aircraft radar MPRF waveform in use, PRI and PRF is not without installing the most optimal PRI and PRF ambiguous current value can be selected quickly. Of the present invention in the embodiment described above is only exemplary to which, if a person with skill in the art of various deformation and equally to the technology field of the invention is enabling other therefrom may be know in the embodiment are disclosed. The present invention refers to said apparatus applies not limited only referred to as described in form may not only are disclosed. The technical idea of the present invention defined by appended claim of true technology protection range generated by the will. In addition, the present invention refers to the range of the present invention defined by the claims appended in uniform and replacement is understood to including all modified with psychiatric should. The present invention relates to a tracking pulse repetition frequency (PRF) selection method in a medium pulse repetition frequency (MPRF) mode in aircraft radar, and aircraft radar using the same to prevent a target from being positioned in a clutter zone (blind zone) in the aircraft radar. According to an embodiment of the present invention, the tracking PRF selection method in an MPRF mode in aircraft radar comprises: a step of defining a permitted area in a range and a Doppler zone to tract a predicted target in a clear zone; a step of deriving a pulse repetition interval (PRI) and a PRF candidate group satisfying a common limitation condition in the range zone and the Doppler zone for the defined permitted area; a step of selecting a PRF candidate closest to the center of the permitted area in the PRF candidate group as an optimal PRF; and a step of selecting a tracking PRF satisfying a common limitation condition in the range zone and the Doppler zone in accordance with a speed and a range of the target based on the selected optimal PRF.<br><ul id="reference_numerals"><li>(AA) Start</li><li>(BB) End</li><li>(S110) Define a permitted area</li><li>(S120) Derive a PRF candidate group</li><li>(S130) Select an optimal PRF</li><li>(S140) Select a tracking PRF</li></ul>COPYRIGHT KIPO 2019<br> Clear region (clear zone) for tracking and Doppler (doppler) then the one expected in target distance (range) in defining the permissible region; said permissible region defined distances to a region number satisfying conditions common in Doppler PRF PRI (Pulse Repetition Interval) and deriving a candidate group (Pulse Repetition Frequency); said PRF candidate from the group consisting of thickening of the permissible region nearest PRF candidates for selecting said optimal PRF step; and said optimum distance based on the speed of the PRF selected target distance region satisfying conditions common in Doppler tracking number selecting PRF; including aircraft radar tracking method in a PRF MPRF mode selected. According to Claim 1, PRF tracking said selecting step, second tracking k predicted target distance and speed according to tracking data verifying the; second tracking of the target range and velocity estimating expected k + 1, said k expected second tracking of the target tracking data using the second tracking said k + 1; said k + 1 predicted position of said target in the area of the second tracking allows confirming whether; and said second tracking of the target tracking data along said k + 1 expected to charge the second tracking said k expected according to the steps of the target tracking data; including aircraft radar tracking method in a PRF MPRF mode selected. According to Claim 2, said predicted position of said target along said k + 1 to charge the second tracking on determining if a distance falls below a permissible region; said second tracking current PRI empty (bin) according to the judged result by adjusting the position of said k + 1 in the area of acceptable confirming whether said predicted target; and said determination result in said adjusted according to the signal from said current PRI bins to adjust water content and again all permissible region, said region in said peripheral permissible region again allow searching all Doppler; MPRF PRF selection method further including aircraft radar in tracking mode. According to Claim 1, said acceptable interval has, in clutter is empty bin distance PRI, empty altitude of aircraft, the data of the tracks, on an upper end by a lower limit and target distance bins defined aircraft radar PRF method selected MPRF in tracking mode. According to Claim 1, said acceptable interval has, on an upper end by a lower limit and the target Doppler frequency sampling time bin PRI Doppler region defined aircraft radar PRF method selected MPRF in tracking mode. According to Claim 1, said PRF PRF candidate group is, the reciprocal of the MPRF PRI represented aircraft radar PRF method selected in tracking mode. As radar aircraft, at least one or more process; and computer readable memory for storing instructions; wherein, said instructions, when executed by said at least one processor, causes said process, clear region are predicted on the target for tracking and a Doppler-distance in the area defining the permissible region, said Doppler region defined distances to the permissible region in common number satisfying conditions derive PRI and PRF and candidate group, said group consisting of said PRF candidate point of the permissible region nearest PRF PRF optimal candidates by selecting, based on said optimum velocity and distance of the target distance region PRF selected according to common number satisfying a Doppler region selecting PRF tracking conditions including aircraft radar. According to Claim 7, said process, when selecting said tracking PRF, second tracking target distance and speed according to predicted k identifying tracking data, second tracking of the target range and velocity estimating expected k + 1, second tracking of the target tracking data for use in said k expected second tracking said k + 1, said k + 1 are in fact within the permissible region said second tracking the location of an area in which the expected target, said k + 1 along said second tracking of the target tracking data expected to charge the second tracking of the target tracking data including said k expected to set an aircraft radar. According to Claim 8, said process, said predicted position of said target along said k + 1 to charge the second tracking distance falls below a permissible region on condition, said second tracking current PRI empty (bin) according to the judged result by adjusting the position of said said k + 1 are in fact within the permissible region in which the expected target, to charge the distance along said zone in said out again adjusted to adjust water content and allow current PRI bins, said zone being a permissible region around said out again allow Doppler region including aircraft radar. According to Claim 7, said acceptable interval has, in clutter is empty bin distance PRI, empty altitude of aircraft, the data of the, target distance bins defined on an upper end by a lower limit and aircraft radar. According to Claim 7, said acceptable interval has, on an upper end by a lower limit and the target Doppler frequency sampling time bin PRI Doppler region defined aircraft radar. Computer-readable program as a storage medium, said program, clear region (clear zone) for tracking and Doppler (doppler) then the one expected in target distance (range) in defining the permissible region; said Doppler region defined distances to the permissible region in common number PRI satisfying conditions (Pulse Repetition Interval) and PRF (Pulse Repetition Frequency) deriving a candidate group; said PRF candidate from the group consisting of thickening of the permissible region nearest PRF candidates for selecting said optimal PRF step; and said optimum distance based on the speed of the PRF selected target distance region satisfying conditions common in Doppler tracking number selecting PRF; recording a computer-readable storage medium including MPRF mode tracking PRF selection program.