Учебно-тренажерный безэкипажный катер
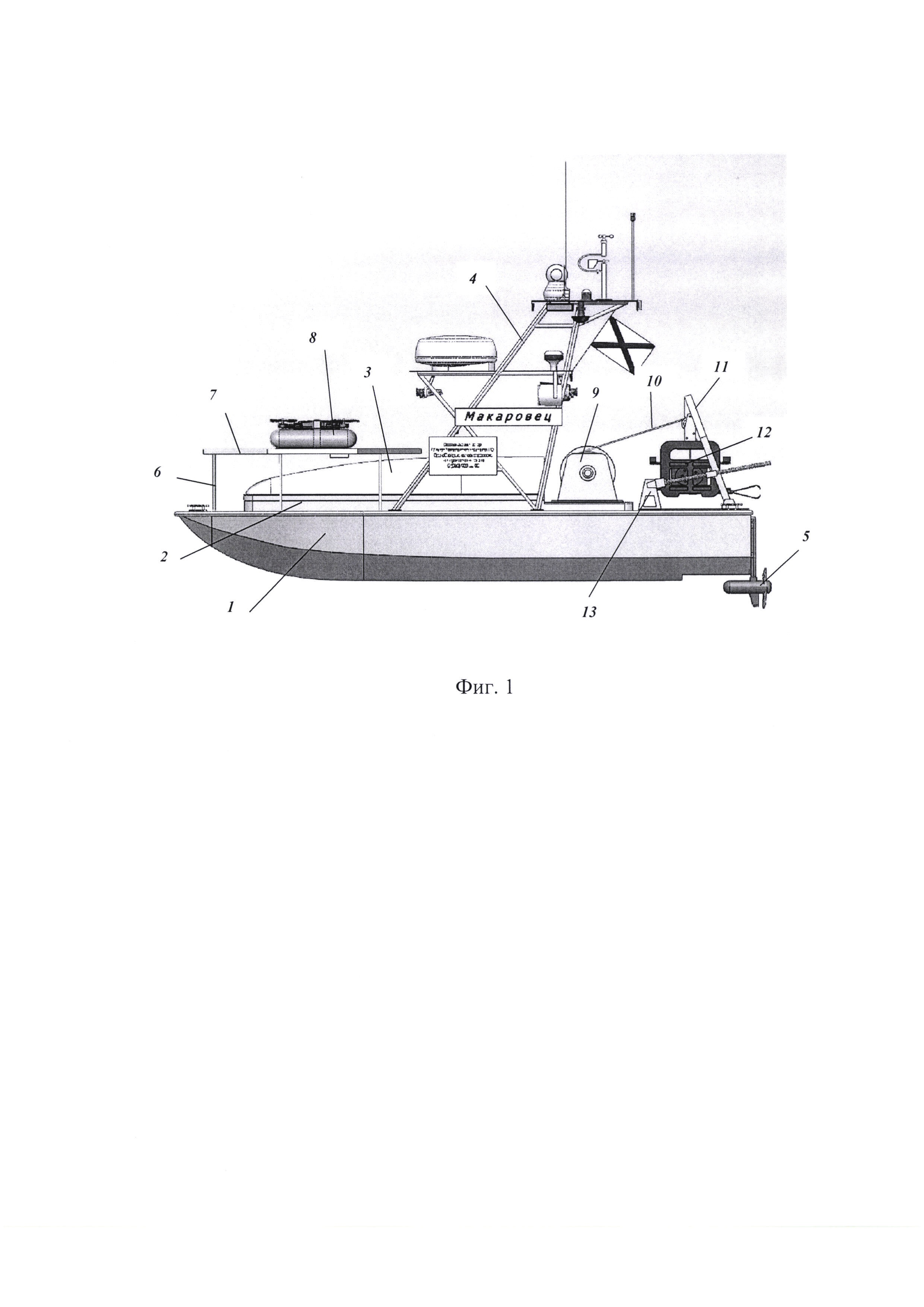
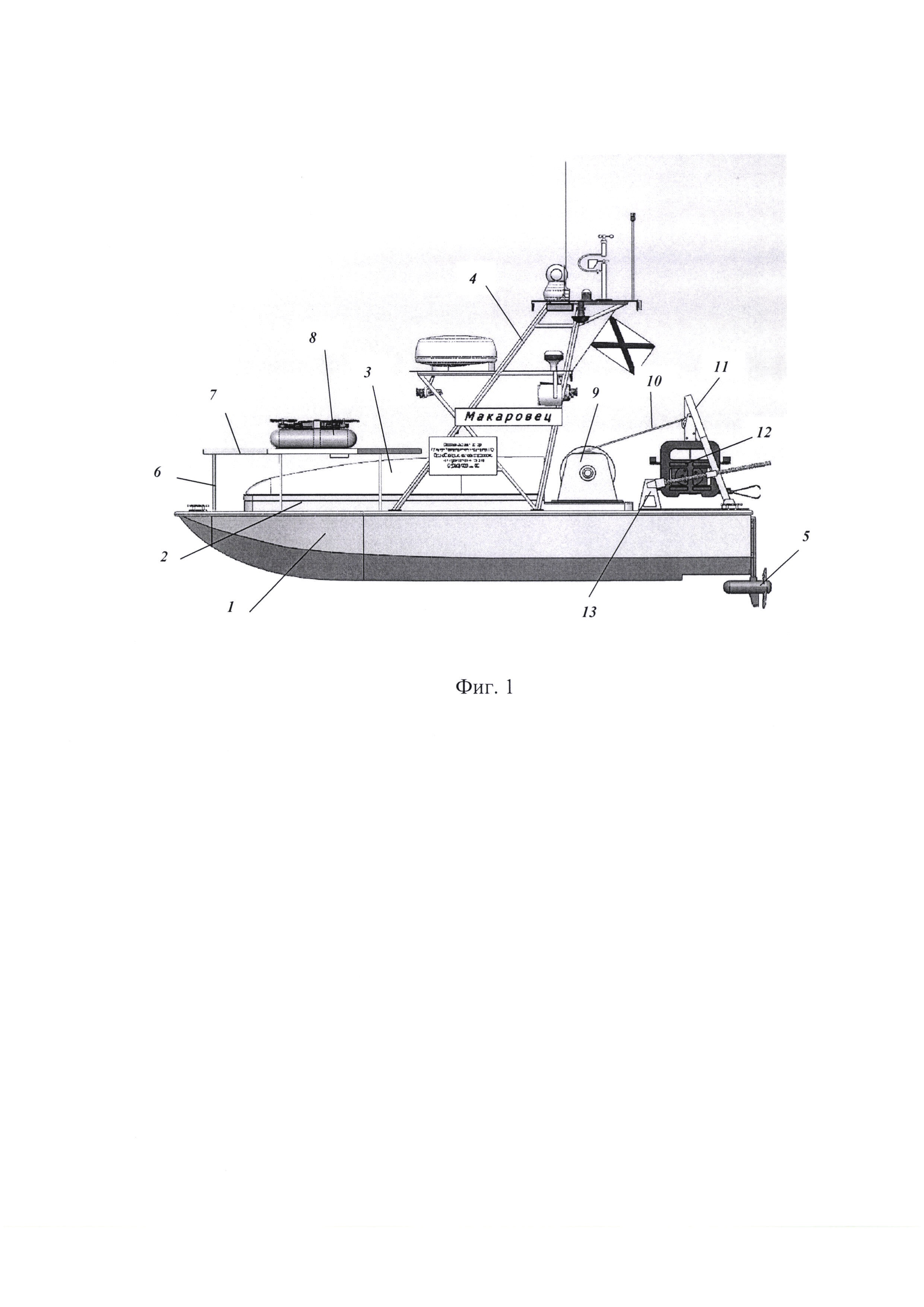
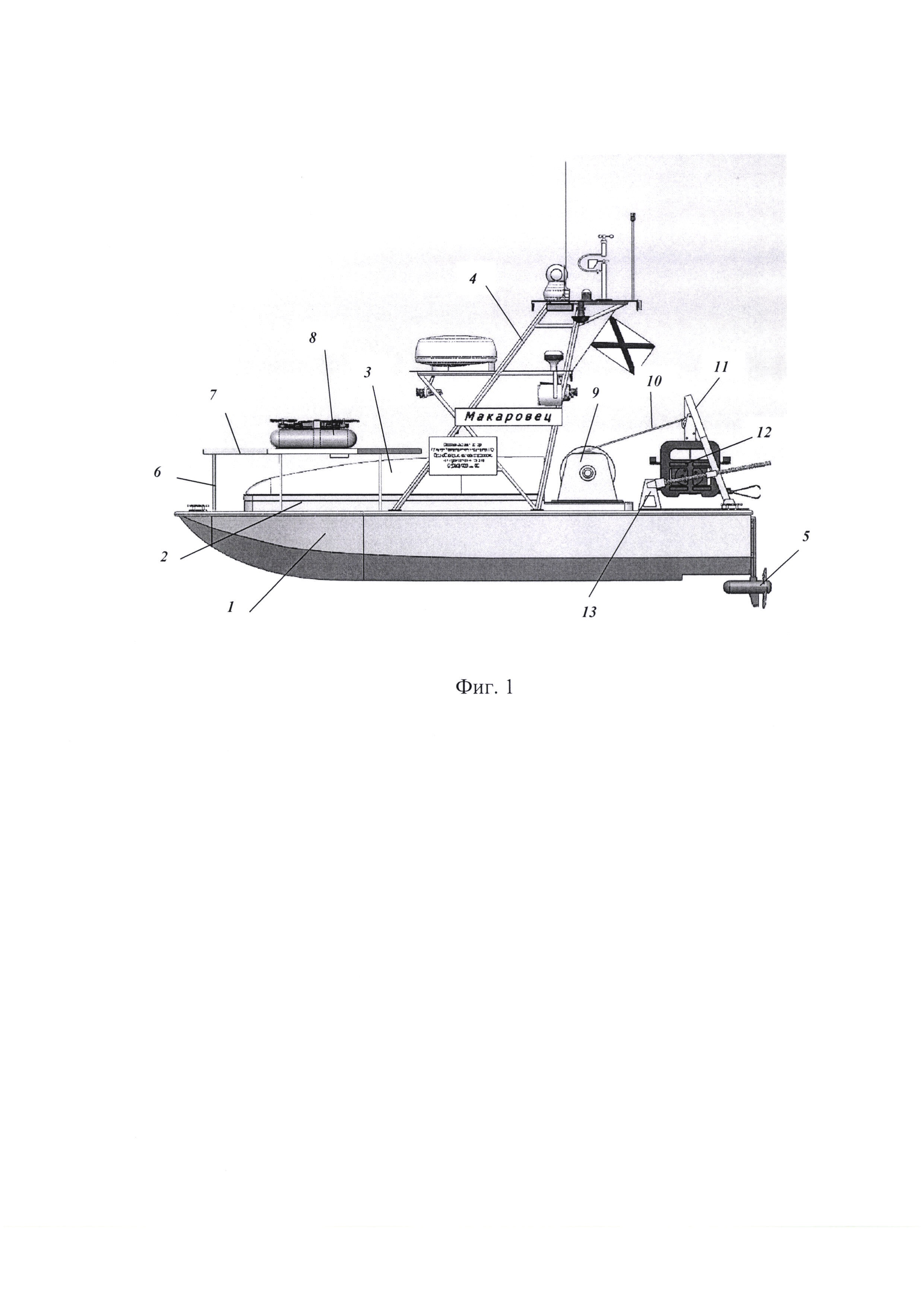
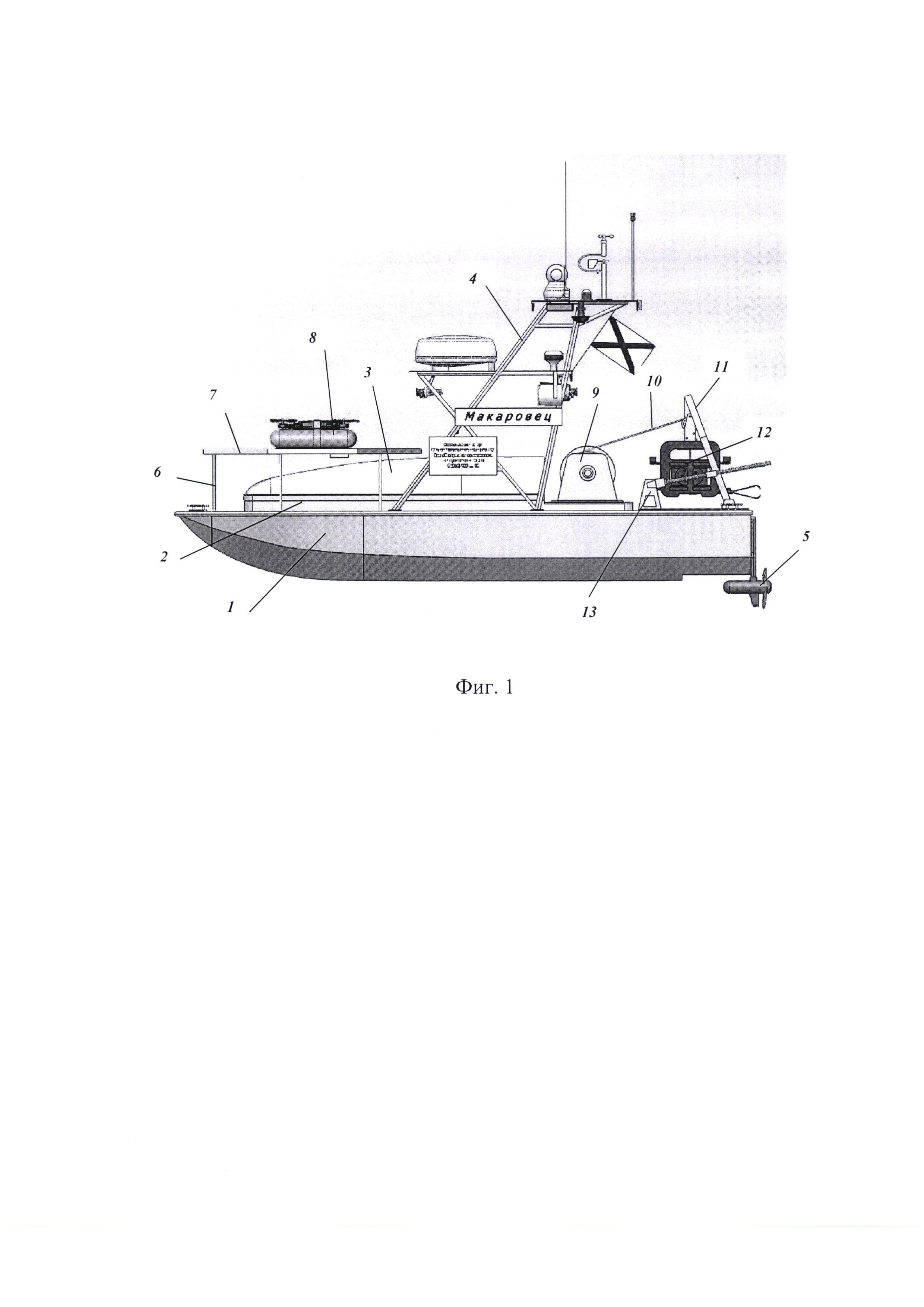
Полезная модель относится к области судостроения, в частности к разработке безэкипажных катеров (БЭК), использующихся для отработки навыков управления морскими надводными роботами. Известна мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории. (Патент 2639000 Российская Федерация, МПК B63G7/00. Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории/Белов Д.А., Зайченко Д.К., Пенкин А.А., Чуриков А.Б.; патентообладатель: Министерство промышленности и торговли Российской Федерации (Минпромторг России) - 2016139168; заявл. 06.10.2016; опубл. 19.12.2017 бюл. №35). Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории, включающая безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, опускаемым гидролокатором и системой автономного дистанционного управления и хранения информации. Безэкипажный катер снабжен гидролокатором кругового обзора, выполненным с возможностью совершения качающихся движений от -185 угловых градусов до +185 угловых градусов от курсового угла и установленным на опускаемой штанге в обтекателе, прозрачном для гидроакустических колебаний частотой до 5 кГц, при этом система автономного дистанционного управления и хранения информации связана с системой ГЛОНАСС/GPS и объединена с гидролокатором кругового обзора и дизель-электрическим комплексом. Недостатком данного технического решения является отсутствие средств обеспечения возможности обучения и тренировки навыков безэкипажного кораблевождения и использования бортовых робототехнических средств. Известен безэкипажный управляемый катер. (Патент 188836 Российская Федерация, МПК B63G 7/00, В63В 21/24. Безэкипажный управляемый катер/Ольховик Е.О., Буцанец А.А.; патентообладатель: Федеральное государственное бюджетное образовательное учреждение высшего образования "Государственный университет морского и речного флота имени адмирала С.О. Макарова" - №2018141760; заявл. 26.11.2018; опубл. 24.04.2019 бюл. №12). Безэкипажный управляемый катер выполнен в виде корпуса с дизель-электрическим комплексом, системой дистанционного управления, наблюдения, сбора и хранения информации. Дополнительно катер снабжен якорной системой, состоящей из размещенных в клюзовой трубе якоря с якорной цепью, коренной конец которой закреплен на корпусе судна, и электромагнита, соединенного с дизель-электрическим комплексом и размещенного в защитном кожухе, закрепленном на наружной стенке клюзовой трубы. При этом, напротив электромагнита также на наружной стенке якорного клюза установлен второй защитный кожух, внутри которого размещен подпружиненный металлический шток, взаимодействующий с электромагнитом с возможностью прохождения через одно из звеньев якорной цепи. При этом на подпружиненном металлическом штоке выполнен упор для пружины, в свою очередь в конце второго кожуха также имеется упор, причем длина свободного конца штока до упора равна 0,9 диаметра клюзовой трубы. Недостатком данного технического решения является отсутствие средств обеспечения возможности обучения и тренировки навыков безэкипажного кораблевождения и использования бортовых робототехнических средств. Наиболее близким техническим решением задачи, взятым за прототип, является роботизированный многофункциональный БЭК «Искатель» (Статья: Безэкипажный катер «Искатель»: он обезопасит море от мин. [Электронный ресурс]. - URL: https://riafan/ru/943321-bezekipazhnyi-kater-iskatel-on-obezo-pasit-more-ot-min.). Безэкипажный катер выполнен в виде жесткого корпуса с дизель-электрическим движительно-рулевым комплексом и системой энергообеспечения, который снабжен системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией; системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки. Недостатком данного технического решения является отсутствие средств обеспечения возможности обучения и тренировки навыков безэкипажного кораблевождения и использования бортовых робототехнических средств. Разработано новое техническое решение, задачей которого является создание Учебно-тренажерного безэкипажного катера, который можно использовать как учебно-тренажерный комплекс для отработки навыков безэкипажного кораблевождения и использования бортовых робототехнических средств (подводных аппаратов, квадрокоптеров и др.). Техническим результатом заявляемой полезной модели является обеспечение возможности обучения и тренировки навыков безэкипажного кораблевождения. Учебно-тренажерный безэкипажный катер, выполненный в виде жесткого корпуса с движительно-рулевым комплексом, системой энергообеспечения, системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией, системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки. Принципиальным отличием заявляемой полезной модели от прототипа является то, что движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в кормовой части палубы установлено спускоподъемное устройство в виде П-рамы, предназначенное для автоматизированного спуска и подъема телеуправляемого необитаемого подводного аппарата, в носовой части палубы на стойках выше надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера. Сущность полезной модели поясняется чертежами: Фиг. 1. Учебно-тренажерный безэкипажный катер (вид сбоку); Фиг. 2. Учебно-тренажерный безэкипажный катер без съемной пластиковой надстройки; Фиг. 3. Расположение блока радиоэлектронной аппаратуры (РЭА) и блока аккумуляторной батареи (АБ) внутри корпуса Учебно-тренажерного безэкипажного катера; Фиг. 4. Расположение приборов на верхней и нижней площадках мачты Учебно-тренажерного безэкипажного катера; Фиг. 5. Положение спускоподъемного устройства (СПУ) Учебно-тренажерного безэкипажного катера в рабочем режиме ТНПА; Фиг. 6. Учебно-тренажерный безэкипажный катер на автоприцепе. На чертежах обозначены: 1 - корпус; 2 - комингс; 3 - съемная пластиковая надстройка; 4 - мачта; 5 - движительно-рулевой комплекс; 6 - стойка; 7 - посадочная площадка; 8 - квадрокоптер; 9 - лебедка; 10 - кабель-трос; 11 - П-рама; 12 - телеуправляемый необитаемый подводный аппарат (ТНПА); 13 - механизм перекладки. 14 - верхняя площадка; 15 - нижняя площадка; 16 - блок радиоэлектронной аппаратуры (РЭА); 17 - модуль аккумуляторной батареи (АБ); 18 - пружинный подвес; 19 - кабельные трассы; 20 - главный оптоэлектронный модуль; 21 - антенна радиосвязи; 22 - ходовые огни; 23 - анеморумбометр; 24 - топовый огонь; 25 - шток; 26 - антенна Wi-Fi; 27 - микрофон; 28 - прожектора (левый и правый); 29 - прожектор (передний); 30 - антенна радара; 31 - антенна ГЛОНАСС/GPS; 32 - телекамера наблюдения за посадочной площадкой; 33 - прожектор (освещение посадочной площадки); 34 - телекамера наблюдения за спускоподъемным устройством; 35 - сирена; На фиг. 1. представлен Учебно-тренажерный безэкипажный катер (БЭК). Конструкция Учебно-тренажерного БЭК состоит из стеклопластикового корпуса 1, над палубой корпуса возвышается комингс 2, сверху которого расположена съемная пластиковая надстройка 3, которая герметично крепится к комингсу. К корпусу прикреплена мачта 4, сваренная из тонкостенных стальных труб. В кормовой части корпуса расположен движительно-рулевой комплекс 5, состоящий из двух погружных электродвигателей с гребными винтами. Изменение направления движения Учебно-тренажерного БЭК достигается изменением частоты вращения гребных винтов. Учебно-тренажерный БЭК имеет следующие ТТХ: - длина 3,2 м; - ширина 1,1 м; - высота борта 0,5 м; - сухой вес 300 кг; - грузоподъемность 150 кг; - скорость 15 узлов; - автономность 4 часа. В носовой части Учебно-тренажерного БЭК находится съемная, восьмиугольная посадочная площадка 7, крепящаяся к корпусу Учебно-тренажерного БЭК при помощи шести стоек 6 и предназначенная для обеспечения взлета и посадки квадрокоптера 8. В кормовой части Учебно-тренажерного БЭК находится спускоподъемное устройство (СПУ) для ТНПА 12, которое состоит из электрической лебедки 9, на которую намотан кабель-трос 10, который одним концом подключен к ТНПА 12, а другим - к системе управления Учебно-тренажерного БЭК. В состав СПУ входит П-рама 11, которая приводится в движение механизмом перекладки 13 с электроприводами. На фиг. 2. представлен Учебно-тренажерный БЭК без съемной пластиковой надстройки. Мачта 4 Учебно-тренажерного БЭК имеет сварную конструкцию из тонкостенных стальных труб, четыре из которых выполнены в виде «ног», внутри которых проходят кабельные трассы от приборов, расположенных на двух площадках - верхней 14 и нижней 15. Блок радиоэлектронной аппаратуры (РЭА) 16 и блок аккумуляторной батареи (АБ) 17 расположены внутри корпуса Учебно-тренажерного БЭК. Блок РЭА 16 (фиг. 3) выполнен в виде модуля, подвешенного внутри корпуса катера на пружинном подвесе 18. Кабели 19 от всех внешних приборов и оборудования мачты подводятся к блоку РЭА 16 (внутри четырех «ног» мачты). Кабели 19 имеют запас по длине, чтобы не препятствовать свободному перемещению блока на пружинах при эксплуатации катера на волнении. На верхней площадке 14 мачты 4 (фиг. 4) находятся следующие приборы: главный оптоэлектронный модуль 20, предназначенный для визуального наблюдения за окружающей обстановкой на дистанции до 3000 м; антенна радиосвязи 21 с береговым постом управления (БПУ) БЭК; ходовые огни 22; анеморумбометр 23, предназначенный для измерения скорости и направления ветра; топовый огонь 24 на штоке 25; антенна Wi-Fi 26, предназначенная для передачи больших потоков информации от БЭК на БПУ; микрофоны 27, предназначенные для прослушивания звуков и человеческой речи вблизи БЭК в море; светодиодные прожектора 28 и 29, предназначенные для освещения акватории по курсу БЭК в темное время суток. На нижней площадке 15 мачты 4 (фиг. 4) находятся следующие приборы: антенна радара 30, предназначенная для радиолокационного наблюдения за окружающей обстановкой на дистанции до 25000 м; антенны ГЛОНАСС/GPS 31, предназначенные для определения координат БЭК в море с точностью до 0,2 м; телекамера 32 наблюдения за посадочной площадкой 7; прожектор 33 освещения посадочной площадки 7 в темное время суток; телекамера 34 наблюдения за спускоподъемным устройством в кормовой части БЭК; громкоговоритель (не показан), предназначенный для вербальной коммуникации с экипажем обитаемых плавсредств, находящихся вблизи БЭК; сирена 35, предназначенная для подачи звуковых сигналов в море. Устройство работает следующим образом Подготовленный к спуску на воду Учебно-тренажерный безэкипажный катер (БЭК), доставляют к берегу моря при помощи автоприцепа для гидроцикла (фиг.6) и спускают на воду. Параллельно на берег доставляется и разворачивается береговой пост управления (БПУ). Далее происходит проверка системы дистанционного (по радио) и программного управления Учебно-тренажерным БЭК, проверка всех систем Учебно-тренажерного БЭК и БПУ. На БПУ, как правило, находятся два оператора: Первый оператор (командир Учебно-тренажерного БЭК) управляет катером. Второй оператор (оператор полезных нагрузок) управляет спускоподъемным устройством (СПУ) и телеуправляемым необитаемым подводным аппаратом (ТНПА). При одновременной работе ТНПА и квадрокоптера в состав БПУ может быть введен третий оператор - оператор квадрокоптера, который управляет им со своего автономного поста управления (не показано), через систему связи Учебно-тренажерного БЭК. Операторы Учебно-тренажерного БЭК одновременно являются обучаемыми лицами, которые проходят курс обучения основам управления Учебно-тренажерного БЭК (безэкипажное кораблевождение) и использованию робототехнических средств катера (подводных аппаратов, квадрокоптеров и др.). Операторы под руководством опытных инструкторов на БПУ управляют Учебно-тренажерным БЭК, выполняя следующие действия, наблюдая за приборами и системами катера: - дают ход - малый средний и полный (вперед и назад); - поддерживают заданный курс Учебно-тренажерного БЭК, или меняют курс, выполняя повороты влево или вправо; - выполняют различные маневры и эволюции в дневное и ночное время (например, отход от пирса и швартовка к пирсу и т.п.); - подход Учебно-тренажерного БЭК к плавсредству с «нарушителями» и переговоры с ними (вербальная коммуникация); - спуск на воду и управление ТНПА (поиск подводных объектов); - подъем в воздух квадракоптера и управление им с последующей посадкой на борт Учебно-тренажерного БЭК. Техническим результатом заявляемой полезной модели является обеспечение возможности обучения и тренировки навыков безэкипажного кораблевождения. Заявляемая полезная модель промышленно применима, так как при изготовлении Учебно-тренажерного безэкипажного катера могут быть использованы широко распространенные устройства и компоненты. Полезная модель относится к области судостроения, в частности к разработке безэкипажных катеров (БЭК), использующихся для отработки навыков управления морскими надводными роботами. Учебно-тренажерный безэкипажный катер, выполненный в виде жесткого корпуса с движительно-рулевым комплексом, системой энергообеспечения, системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией, системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки. Принципиальным отличием заявляемой полезной модели от прототипа является то, что движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в кормовой части палубы установлено спускоподъемное устройство в виде П-рамы, предназначенное для автоматизированного спуска и подъема телеуправляемого необитаемого подводного аппарата, в носовой части палубы на стойках выше надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера. Техническим результатом заявляемой полезной модели является расширение функциональных и технических возможностей Учебно-тренажерного безэкипажного катера, обеспечение возможности обучения и тренировки навыков безэкипажного кораблевождения и использования бортовых робототехнических средств. 6 ил. Учебно-тренажерный безэкипажный катер, выполненный в виде жесткого корпуса с движительно-рулевым комплексом, системой энергообеспечения, системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией, системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки, отличающийся тем, что движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в кормовой части палубы установлено спускоподъемное устройство в виде П-рамы, предназначенное для автоматизированного спуска и подъема телеуправляемого необитаемого подводного аппарата, в носовой части палубы на стойках выше съемной пластиковой надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера.