DISPLAY DEVICE INCLUDING PIN, DISPLAY SYSTEM USING PIN, AND DISPLAY METHOD OF SAME
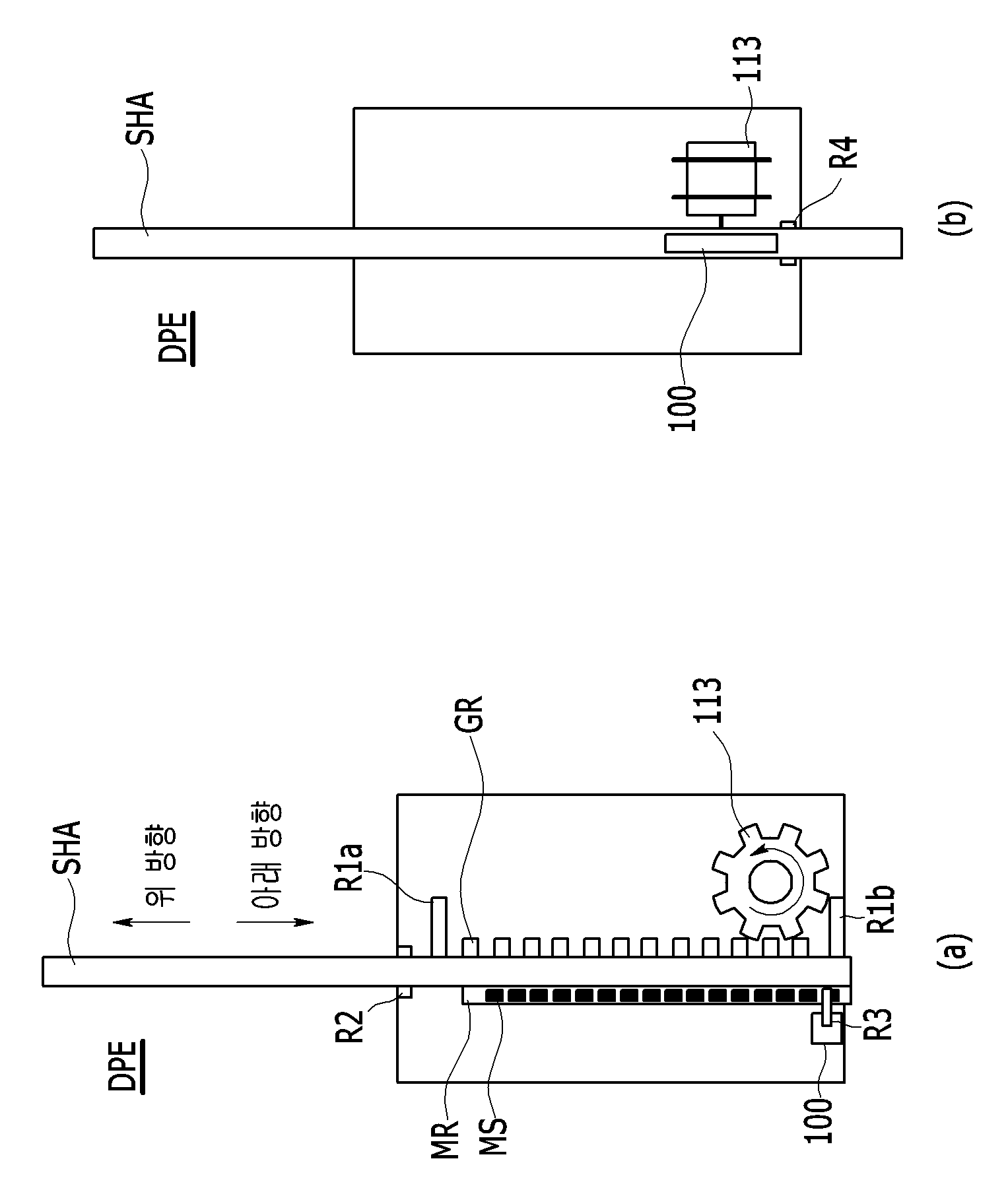
본 발명은 핀을 포함하는 디스플레이 소자, 핀을 사용하는 디스플레이 시스템, 그리고 이의 디스플레이 방법에 관한 것이다. 핀(pin)을 이용해 영상을 표현하는 기존의 디스플레이 장치에서는, 핀이 수동적으로 움직인다. 즉, 기존의 디스플레이 장치에서는 핀이 수동 방식으로 움직인다. 사용자에 의해 임의로 입력된 영상을 소정 포맷의 영상으로 변환하고 상기 변환된 영상을 표현하기 위하여 핀을 자동적으로 이동시키는 디스플레이 장치가 필요하다. 본 발명이 해결하고자 하는 과제는, 자동적으로 움직이는 핀을 이용해 입력 영상을 표현하는 디스플레이 장치 및 방법을 제공하는 것이다. 본 발명의 실시예에 따르면, 디스플레이 소자가 제공된다. 상기 디스플레이소자는, 기준점으로부터 핀 포인트까지의 거리를 나타내는 핀 깊이를 가지는 막대 형태의 제1 핀; 상기 제1 핀을 상기 기준점을 향하는 제1 방향 및 상기 제1 방향의 반대인 제2 방향 중 적어도 하나의 방향으로 이동시키는 모터; 및 영상의 영역들 중 제1 영역의 흑백 레벨에 대응하는 제1 핀 깊이를 상기 제1 핀이 가지도록, 상기 모터의 구동을 제어하는 컨트롤러를 포함한다. 상기 디스플레이 소자는, 소정의 간격을 가지는 복수의 마킹 스팟(marking spot)을 포함하며 상기 제1 핀과 함께 이동하는 마킹 영역; 및 상기 마킹 영역이 이동하는 경우에, 상기 복수의 마킹 스팟 중 기준 영역을 통과하는 마킹 스팟을 감지하는 센서를 더 포함할 수 있다. 상기 컨트롤러는 상기 감지된 마킹 스팟의 개수가 상기 제1 핀 깊이에 대응하는 경우에, 상기 모터의 구동을 멈출 수 있다. 상기 마킹 영역에 포함되는 마킹 스팟의 개수는, 상기 제1 핀이 가질 수 있는 핀 깊이의 범위를 나타내는 깊이 범위에 기초해 조정될 수 있다. 상기 디스플레이 소자는, 상기 모터의 회전 수를 감지하는 센서를 더 포함할 수 있다. 상기 컨트롤러는 상기 감지된 회전 수가 상기 제1 핀 깊이에 대응하는 경우에, 상기 모터의 구동을 멈출 수 있다. 상기 컨트롤러는, 입력 받은 속도에 기초해 상기 모터의 속도를 조정할 수 있다. 상기 제1 핀은, 소정의 형태를 가지는 머리 장식 부재(member)의 삽입 공간에 삽입될 수 있다. 상기 모터는, DC(direct current) 모터, AC(alternating current) 모터, 서보(servo) 모터, 스테퍼(stepper) 모터, 및 기어드(geared) 모터 중 하나일 수 있다. 상기 컨트롤러는, USB(universal serial bus) 및 네트워크 중 적어도 하나를 통해 외부 장치로부터 상기 제1 핀 깊이를 위한 제1 깊이 데이터를 수신할 수 있다. 상기 외부 장치는, 상기 영상을 흑백 영상으로 변환하고, 상기 흑백 영상을 흑백 레벨화하여 흑백 레벨 데이터를 생성하고, 상기 흑백 레벨 데이터를 이용해 상기 제1 깊이 데이터를 포함하는 복수의 깊이 데이터를 생성할 수 있다. 상기 제1 핀은 복수의 핀이 행렬 구조로 배치되는 핀 어레이에 포함될 수 있다. 상기 외부 장치는, 상기 핀 어레이에 포함되는 핀의 개수에 기초해 상기 흑백 영상을 복수의 분할 영역으로 나누고, 상기 복수의 분할 영역 별로 상기 흑백 레벨 데이터를 생성하고, 상기 복수의 분할 영역 별 흑백 레벨 데이터를 이용해 상기 복수의 깊이 데이터를 생성할 수 있다. 상기 제1 핀은 복수의 핀이 행렬 구조로 배치되는 핀 어레이에 포함될 수 있다. 상기 외부 장치는, 상기 복수의 핀의 위치에 기초해 상기 복수의 깊이 데이터를 상기 복수의 핀 각각에 매칭할 수 있다. 또한 본 발명의 다른 실시예에 따르면, 디스플레이 시스템이 제공된다. 상기 디스플레이 시스템은, 복수의 제1 핀을 포함하는 제1 핀 어레이; 상기 복수의 제1 핀의 이동을 위한 복수의 제1 모터를 포함하는 제1 모터 어레이; 상기 제1 모터 어레이의 구동을 위한 복수의 제1 모터 드라이버를 포함하는 제1 드라이버 보드; 및 영상의 영역들 중 상기 복수의 제1 핀을 위한 복수의 제1 영역의 흑백 레벨에 대응하는 복수의 제1 핀 깊이를 상기 복수의 제1 핀이 가지도록, 상기 제1 드라이버 보드를 제어하는 제1 제어 보드를 포함한다. 상기 제1 드라이버 보드는, 보드 커넥터를 통해 상기 제1 제어 보드와 연결되거나 분리될 수 있다. 상기 디스플레이 시스템은, 복수의 제2 핀의 이동을 위한 복수의 제2 모터를 포함하는 제2 모터 어레이; 상기 제2 모터 어레이의 구동을 위한 복수의 제2 모터 드라이버를 포함하는 제2 드라이버 보드; 및 상기 영상의 영역들 중 상기 복수의 제2 핀을 위한 복수의 제2 영역의 흑백 레벨에 대응하는 복수의 제2 핀 깊이를 상기 복수의 제2 핀이 가지도록, 상기 제2 드라이버 보드를 제어하는 제2 제어 보드를 더 포함할 수 있다. 상기 복수의 제2 영역은 상기 복수의 제1 영역과 다를 수 있다. 상기 제1 제어 보드는, UART(universal asynchronous receiver/transmitter), USB(universal serial bus), 및 무선 네트워크 중 적어도 하나를 통해 통신하는 외부 장치에 의해 제어될 수 있다. 상기 복수의 제1 모터는, 다이폴 샤프트(dipole shaft)와 듀얼 샤프트(dual shaft) 중 적어도 하나를 가질 수 있다. 상기 복수의 제1 영역은 흑백으로 변환되고, 상기 흑백 변환된 복수의 제1 영역의 흑백 레벨 데이터에 기초해 상기 복수의 제1 핀 깊이를 위한 복수의 제1 깊이 데이터가 생성될 수 있다. 상기 제1 제어 보드는, 상기 복수의 제1 깊이 데이터에 기초해 상기 복수의 제1 모터 드라이버를 제어할 수 있다. 상기 디스플레이 시스템은, 상기 복수의 제1 모터의 회전 수를 감지하는 센서를 더 포함할 수 있다. 상기 복수의 제1 모터 드라이버는, 상기 복수의 제1 모터 각각의 회전 수가 상기 복수의 제1 핀 깊이 각각에 대응하는 경우에, 상기 복수의 제1 모터 각각의 구동을 멈출 수 있다. 상기 디스플레이 시스템은, 제1 마킹 영역이 상기 복수의 제1 핀 중 하나와 함께 이동하는 경우에, 상기 제1 마킹 영역에 포함된 복수의 마킹 스팟 중 기준 영역을 통과하는 마킹 스팟을 감지하는 센서를 더 포함할 수 있다. 상기 복수의 제1 모터 드라이버 중 하나는, 상기 감지된 마킹 스팟의 개수가 상기 복수의 제1 핀 깊이 중 상기 제1 마킹 영역과 함께 이동하는 제1 핀을 위한 제1 핀 깊이에 대응하는 경우에, 상기 복수의 제1 모터 중 상기 제1 마킹 영역과 함께 이동하는 제1 핀을 위한 제1 모터의 구동을 멈출 수 있다. 상기 제1 핀 어레이는 복수의 핀 어레이에 포함될 수 있다. 상기 영상은 상기 복수의 핀 어레이에 포함되는 핀의 전체 개수에 기초해 복수의 분할 영역으로 분할될 수 있다. 상기 복수의 분할 영역은 상기 복수의 제1 영역을 일부로써 포함할 수 있다. 또한 본 발명의 또 다른 실시예에 따르면, 디스플레이 시스템이 영상을 디스플레이하는 방법이 제공된다. 상기 디스플레이 시스템의 디스플레이 방법은, 상기 영상의 흑백 레벨에 대응하는 깊이 데이터를 수신하는 단계; 상기 깊이 데이터에 기초해 핀을 모터를 통해 이동시키는 단계; 및 상기 깊이 데이터에 대응하는 핀 깊이를 상기 핀이 가지는 경우에, 상기 모터의 구동을 멈추는 단계를 포함한다. 상기 핀의 핀 깊이는 기준점으로부터 상기 핀의 핀 포인트까지의 거리를 나타낼 수 있다. 본 발명의 실시예에 따르면, 새로운 디스플레이 소자를 통해 입체감 있는 3차원(3D) 영상(또는 3차원 화면)을 구성(또는 표현)할 수 있고, 이를 통해 다양한 디스플레이를 제공할 수 있다. 또한 본 발명의 실시예에 따르면, 새로운 디스플레이 소자에 기반한 다양한 연출을 통해 새로운 미디어를 제공할 수 있고, 이를 통해 광고 및 임팩트 있는 느낌을 제공할 수 있다. 도 1은 본 발명의 실시예에 따른, 핀 포인트를 이용하는 디스플레이 소자의 단면을 나타내는 도면이다. 도 2는 본 발명의 실시예에 따른, 디스플레이 소자의 핀 깊이(depth)에 대응하는 마킹(marking) 스팟(spot)의 구조를 나타내는 도면이다. 도 3은 본 발명의 실시예에 따른, 디스플레이 소자의 핀 움직임을 나타내는 도면이다. 도 4는 본 발명의 실시예에 따른, 입력된 깊이 값에 따라 핀을 이동시키는 복수의 디스플레이 소자를 나타내는 도면이다. 도 5는 본 발명의 실시예에 따른, 디스플레이 소자가 마킹 스팟을 체크하는 방법을 나타내는 도면이다. 도 6은 본 발명의 실시예에 따른, 직렬로 배치된 복수의 디스플레이 소자를 나타내는 도면이다. 도 7은 본 발명의 실시예에 따른, 디스플레이 소자의 핀에 적용될 수 있는 다양한 형태의 핀 머리 장식 부재를 나타내는 도면이다. 도 8은 본 발명의 실시예에 따른, 디스플레이 소자의 핀에 구 형태의 핀 머리 장식 부재를 적용하는 방법을 나타내는 도면이다. 도 9는 본 발명의 실시예에 따른, 디스플레이 소자의 구성과 디스플레이 소자를 운영하는 운영 장치를 나타내는 도면이다. 도 10은 본 발명의 실시예에 따른, 디스플레이 소자와 운영 장치를 포함하는 디스플레이 시스템을 나타내는 도면이다. 도 11은 본 발명의 실시예에 따른, 이미지 처리부의 구성을 나타내는 도면이다. 도 12는 본 발명의 실시예에 따른, 디스플레이 소자를 통해 영상이 디스플레이되는 화면을 나타내는 도면이다. 도 13은 본 발명의 실시예에 따른, 디스플레이 소자를 통해 음각 및 양각을 표현하는 방법을 나타내는 도면이다. 도 14는 본 발명의 실시예에 따른, 빛 세기를 조절하여 영상을 표현하는 방법을 나타내는 도면이다. 도 15는 본 발명의 실시예에 따른, 모터 드라이버 어레이를 제어하는 메인 컨트롤 보드를 나타내는 도면이다. 도 16은 본 발명의 실시예에 따른, 메인 컨트롤 보드, 드라이버 보드, 및 모터 어레이를 포함하는 디스플레이 시스템을 나타내는 도면이다. 도 17은 본 발명의 실시예에 따른, 드라이버 보드를 나타내는 도면이다. 도 18은 본 발명의 실시예에 따른, 복수의 모터 어레이를 제어하는 디스플레이 시스템을 나타내는 도면이다. 아래에서는 첨부한 도면을 참고로 하여 본 발명의 실시예에 대하여 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명한다. 그러나 본 발명은 여러 가지 상이한 형태로 구현될 수 있으며 여기에서 설명하는 실시예에 한정되지 않는다. 그리고 도면에서 본 발명을 명확하게 설명하기 위해서 설명과 관계없는 부분은 생략하였으며, 명세서 전체를 통하여 유사한 부분에 대해서는 유사한 도면 부호를 붙였다. 명세서 전체에서, 어떤 부분이 다른 부분과 '연결'되어 있다고 할 때, 이는 '직접적으로 연결'되어 있는 경우뿐만 아니라, 그 중간에 다른 소자를 사이에 두고 '전기적으로 연결'되어 있는 경우도 포함한다. 명세서 및 청구범위 전체에서, 어떤 부분이 어떤 구성 요소를 '포함'한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성 요소를 더 포함할 수 있는 것을 의미한다. 한편, 본 명세서에서, 'A 또는 B'는, 'A', 'B', 또는 'A와 B 모두'를 포함할 수 있다. 1. 핀 포인트를 이용한 디스플레이 소자 핀 포인트를 이용한 디스플레이 소자(또는 디스플레이 장치)는 모터(motor)를 포함한다. 본 발명의 실시예에 따른 디스플레이 시스템은 센서를 이용해 모터를 제어하여, 3차원(3D) 입체 영상을 구현(또는 표현)할 수 있다. 디스플레이 소자에 포함되는 핀은 모터와 센서를 통해 나오거나 들어갈 수 있고, 이를 통해 핀 깊이를 가질 수 있다. 핀 깊이는 핀이 디스플레이 소자의 몸통으로부터 소정 방향으로 나온 길이, 디스플레이 소자의 외부에 노출된 핀의 길이를 나타낼 수 있다. 또는 핀 깊이는, 디스플레이 소자의 외부에 노출되는 핀의 최대 길이를 기준으로, 핀이 디스플레이 소자의 몸통 방향으로 들어간 정도를 나타낼 수 있다. 즉, 핀의 핀 깊이는 기준점(예, 최대로 나온 핀의 끝)으로부터 핀의 핀 포인트까지의 거리를 나타낸다. 핀 깊이를 가지는 핀을 통해, 3차원(3D) 입체감이 표현될 수 있다. 디스플레이 소자에 포함되는 핀은 막대 형태를 가지거나 샤프트(shaft) 형태를 가질 수 있다. 핀 포인트는 핀의 머리 부분(끝 부분)을 나타낸다. 디스플레이 소자는 센서를 이용해 모터 구동을 제어할 수 있다. 디스플레이 소자는 핀을 깊이 형태로 구동하여, 핀을 앞뒤 방향으로 이동시킬 수 있다. 핀 깊이를 가지는 다수의 핀의 핀 포인트를 이용해, 입체감을 가지는 영상이 표현될 수 있다. 깊이 정보를 가지는 많은 핀이 인지되고, 이러한 핀들을 통해, 입체감 및 평면감을 가지는 영상이 표현될 수 있다. 디스플레이 시스템은 입력된 영상을 흑백 영상으로 변환하고, 흑백 영상의 깊이 별로 디스플레이 소자의 핀을 앞뒤로 움직인다. 디스플레이 시스템은 앞뒤로 나오는 핀의 길이를 이용해 영상을 표현한다. 디스플레이 소자는 모터 구동 방식을 이용할 수 있다. 구체적으로, 모터 구동 방식은 센서(예, 적외선 센서)를 통해 마킹 스팟을 인식하여 핀 깊이를 처리할 수 있다. 또는 모터 구동 방식은 모터의 회전 수를 이용해 핀 깊이를 처리할 수 있다. 모터는 이미지 처리를 통해 획득된 깊이를 핀이 가지도록 하기 위하여 핀을 움직인다. 디스플레이 소자는 센서를 이용해, 모터가 상기 획득된 깊이에 대응하는 값만큼 구동하는지를 체크할 수 있다. 예를 들어, 디스플레이 소자는 적외선 센서를 이용해 마킹 스팟을 감지하여, 모터가 원하는 값만큼 구동하는지를 체크할 수 있다. 다른 예를 들어, 디스플레이 소자는 센서(예, 모터에 연결된 센서)를 이용해 모터의 회전 수를 감지하여, 모터가 원하는 값만큼 구동하는지를 체크할 수 있다. 이하에서는 모터의 회전 수를 감지하는 센서를, '모터 회전 센서'라 한다. 디스플레이 시스템은 복수의 디스플레이 소자의 핀을 이동시켜, 입체감을 가지는 화면을 구성할 수 있다. 깊이를 가지는 핀의 핀 포인트는 입체적인 3차원(3D) 효과를 제공한다. 이미지 처리부는 입력 영상의 RGB(red-green-blue) 패턴을 흑백 음영 처리하고, 흑백 음영 처리된 영상에 흑백 단계(gray step)를 적용하여 깊이 값을 가지는 데이터를 생성한다. 센서는 깊이 값을 가지는 데이터에 기초해 마킹 스팟의 개수 또는 모터의 회전 수를 체크할 수 있고, 이를 통해 핀 길이(또는 핀 깊이)가 판단될 수 있다. RGB 컬러의 영상은 흑백 음영(gray scale) 영상으로 변환되고, 흑백 음영 영상에 흑백 단계(gray step)(또는 깊이 범위)가 적용되어 각 픽셀(pixel)의 깊이 정보(또는 깊이 데이터)가 생성될 수 있다. 이러한 깊이 정보(또는 깊이 데이터)에 기초에, 핀의 길이(또는 핀 깊이), 모터 회전 수, 및 마킹 스팟의 개수가 체크될 수 있다. 픽셀의 깊이 정보는 핀의 핀 깊이에 대응할 수 있다. 모터 구동의 제어와 관련된 정보는 운용 장치 또는 저장 장치에 기 저장(또는 등록)될 수 있다. 디스플레이 소자의 핀은 운용 장치 또는 저장 장치에 기 등록된 정보에 기초해, 앞뒤 방향으로 움직인다. 하나의 영상의 표현이 완료되면, 해당 영상에 대한 표현 정보가 저장될 수 있다. 저장된 표현 정보는, 다른 영상의 표현 시에 사용될 수 있고, 깊이 정보(또는 깊이 데이터)의 보정값으로써 사용될 수 있다. 디스플레이 소자의 핀의 핀 포인트는 점(dot) 형태의 화면을 구성할 수 있다. 이하에서는, 상술한 새로운 디스플레이 소자를 이용해 3차원(3D) 입체감을 가지는 화면을 구성(또는 표현)하는 방법에 대해서 설명한다. 구체적으로, 핀 깊이 값을 영상의 레벨(예, 흑백 레벨)에 자동으로 매핑하고, 매핑된 핀 깊이를 핀이 가지도록 핀의 이동을 모터와 센서를 이용해 제어하는 방법에 대해서 설명한다. 도 1은 본 발명의 실시예에 따른, 핀 포인트를 이용하는 디스플레이 소자의 단면을 나타내는 도면이다. 도 1에서, (a)는 디스플레이 소자(DPE)의 좌측 단면도를 나타내고, (b)는 디스플레이 소자(DPE)의 정면 단면도를 나타낸다. 디스플레이 소자(DPE)는 핀(SHA), 적외선 센서(100), 및 모터(113)를 포함할 수 있다. 핀(SHA)은 막대 형태 또는 샤프트 형태일 수 있다. 핀(SHA)의 일부는 디스플레이 소자(DPE) 내에 포함되며, 핀(SHA)은 위 아래 방향으로 이동한다. 모터(113)는 핀(SHA)을 위 아래 방향으로 이동시킨다. 모터(113)는 기어(GR)를 통해 핀(SHA)과 연결될 수 있다. 적외선 센서(100)는 마킹 스팟(MS)을 감지한다. 적외선 센서(100)는 고정된 위치에 배치될 수 있다. 여기서, 다수의 마킹 스팟(MS)은 마킹 영역(MR)에 위치한다. 마킹 영역(MR)은 핀(SHA)이 움직이는 경우에 핀(SHA)과 함께 핀(SHA)의 이동 방향으로 움직인다. 적외선 센서(100)는 기준 영역(R3)을 통과하는 마킹 스팟(MS)을 감지할 수 있다. 예를 들어, 핀(SHA)이 아래 방향으로 이동하는 경우에, 마킹 영역(MR)도 아래 방향으로 이동하는데, 적외선 센서(100)는 아래 방향으로 기준 영역(R3)을 통과하는 마킹 스팟(MS)을 감지할 수 있다. 감지된 마킹 스팟(MS)의 개수는 핀(SHA)의 깊이에 해당하므로, 핀(SHA)이 원하는 값만큼 이동하였는지가 확인될 수 있다. 즉, 감지된 마킹 스팟(MS)의 개수에 기초해 핀(SHA)의 깊이가 판단될 수 있다. 한편, 적외선 센서(100)는 모터(113)의 회전 수를 감지하는 센서로 대체될 수도 있다. 모터(113)의 회전 수를 감지하는 센서를 통해, 핀(SHA)이 원하는 값만큼 이동하였는지가 확인될 수 있다. 모터(113)의 회전 수는 핀(SHA)의 깊이에 해당하므로, 핀(SHA)이 원하는 값만큼 이동하였는지가 확인될 수 있다. 이하에서는 설명의 편의를 위해서, 디스플레이 소자(DPE)가 적외선 센서(100)를 포함하는 경우를 예로 들어, 본 발명의 실시예를 설명한다. 후술하는 방법은 디스플레이 소자(DPE)가 모터(113)의 회전 수를 감지하는 센서를 포함하는 경우에도 유사하게 적용될 수 있다. 영역(R1a, R1b)은 시작점과 끝점을 알기 위한 영역을 나타내고, 영역(R2)은 핀(SHA)이 특정 구간 이상 이동할 수 없도록 막기 위한 스톱퍼(stopper)를 나타내고, 영역(R4)은 핀(SHA)을 고정하기 위한 고정용 틀을 나타낸다. 도 2는 본 발명의 실시예에 따른, 디스플레이 소자의 핀 깊이(depth)에 대응하는 마킹 스팟의 구조를 나타내는 도면이다. 마킹 영역(MR)에 위치하는 마킹 스팟(MS)의 개수는 깊이 범위에 따라 조정될 수 있다. 여기서, 깊이 범위는 핀(SHA)이 가질 수 있는 깊이 값의 범위를 나타내며, 조절될 수 있다. 예를 들어, 깊이 범위가 큰 경우에, 도 2에서 (a)에 예시된 바와 같이, 많은 마킹 스팟(MS)이 좁은 간격으로 마킹 영역(MR)에 위치할 수 있다. 다른 예를 들어, 깊이 범위가 작은 경우에, 도 2에서 (b)에 예시된 바와 같이, 상대적으로 적은 마킹 스팟(MS)이 넓은 간격으로 마킹 영역(MR)에 위치할 수 있다. 디스플레이 소자(DPE)는 모터(113)를 통해 핀(SHA)을 이동시키고, 입력된 깊이 값에 대응하는 개수만큼 마킹 스팟(MS)이 기준 영역(R3)을 통과하는지를 적외선 센서(100)를 통해 감지하고, 입력 깊이 값에 대응하는 개수만큼의 마킹 스팟(MS)이 기준 영역(R3)을 통과하는 경우에, 모터(113)의 구동을 멈춘다. 이를 통해, 핀(SHA)은 입력된 깊이 값에 해당하는 핀 깊이를 가진다. 디스플레이 소자(DPE)는 입력 깊이 값에 따라 핀(SHA)을 모터(113)를 통해 앞 뒤 방향(또는 위 아래 방향)으로 이동시킬 수 있고, 마킹 스팟(MS)의 감지 개수 또는 모터(113)의 회전 수에 따라 핀(SHA)의 깊이(또는 외부로 노출되는 핀(SHA)의 길이)를 조절할 수 있다. 도 3은 본 발명의 실시예에 따른, 디스플레이 소자의 핀 움직임을 나타내는 도면이다. 도 3은 디스플레이 소자(DPE)의 정면 단면도를 나타낸다. 도 3에 예시된 바와 같이, 디스플레이 소자(DPE)는 모터(113)를 통해 핀(SHA)을 앞 뒤 방향(위 아래 방향)으로 이동시킨다. 도 4는 본 발명의 실시예에 따른, 입력된 깊이 값에 따라 핀을 이동시키는 복수의 디스플레이 소자를 나타내는 도면이다. 도 4는 직렬로 배치된 3개의 디스플레이 소자(DPEa, DPEb, DPEc)의 정면 단면도를 나타낸다. 각 디스플레이 소자(DPEa, DPEb, DPEc)는 입력된 깊이 값에 기초해 모터(113a, 113b, 113c)를 구동시켜 핀(SHAa, SHAb, SHAc)을 이동시키고, 핀(SHAa, SHAb, SHAc)과 함께 움직이는 마킹 스팟(MS)을 적외선 센서(100a, 100b, 100c)를 통해 감지하고, 감지된 마킹 스팟(MS)의 개수가 입력된 깊이 값에 대응하는지를 판단한다. 각 디스플레이 소자(DPEa, DPEb, DPEc)는 모토(113a~113c)의 속도 제어를 통해, 입력 깊이 값에 대응하는 마킹 스팟(MS)의 개수만큼 핀(SHAa~SHAc)을 빠르게 이동시킬 수 있다. 예를 들어, 디스플레이 소자(DPEa)가 깊이 값 1을 입력 받은 경우에, 입력 깊이 값 1에 기초해 핀(SHAa)을 이동시킨다. 이를 통해, 핀(SHAa)은 입력 깊이 값 1에 해당하는 핀 깊이를 가질 수 있다. 다른 예를 들어, 디스플레이 소자(DPEb)가 깊이 값 3을 입력 받은 경우에, 입력 깊이 값 3에 기초해 핀(SHAb)을 이동시킨다. 이를 통해, 핀(SHAb)은 입력 깊이 값 3에 해당하는 핀 깊이를 가질 수 있다. 또 다른 예를 들어, 디스플레이 소자(DPEc)가 깊이 값 9을 입력 받은 경우에, 입력 깊이 값 9에 기초해 핀(SHAc)을 이동시킨다. 이를 통해, 핀(SHAc)은 입력 깊이 값 9에 해당하는 핀 깊이를 가질 수 있다. 도 4에는 모터(113a~113c)의 속도 또는 핀(SHAa~SHAc)의 이동 속도가 10인 경우가 예시되어 있다. 결국, 도 4에 예시된 바와 같이, 핀(SHAc)의 깊이가 가장 크고, 핀(SHAa)의 깊이가 가장 작다. 도 4에 예시된 바와 같이, 핀(SHA)이 디스플레이 소자(DPE)의 몸통 방향으로 들어갈수록, 핀(SHA)은 더 큰 핀 깊이를 가진다. 도 5는 본 발명의 실시예에 따른, 디스플레이 소자가 마킹 스팟을 체크하는 방법을 나타내는 도면이다. 도 5에서, (a)는 핀(SHA)이 이동하기 전을 나타내고 (b)는 핀(SHA)이 이동한 후를 나타낸다. 도 5에는 10개의 마킹 스팟(MS)이 마킹 영역(MR)에 포함되는 경우가 예시되어 있다. 디스플레이 소자(DPE)가 깊이 값 3을 입력 받은 경우에, 핀(SHA)을 아래 방향으로 이동시킨다. 핀(SHA)이 이동하면, 마킹 영역(MR)의 마킹 스팟(MS)도 함께 이동한다. 이 때, 적외선 센서(100)는 기준 영역(R3)을 통과하는 마킹 스팟(MS)을 감지한다. 디스플레이 소자(DPE)는 감지된 마킹 스팟(MS)의 개수가 입력 깊이 값 3에 해당하는지를 판단한다. 디스플레이 소자(DPE)는 감지된 마킹 스팟(MS)의 개수가 입력 깊이 값 3에 해당하는 경우에, 핀(SHA)의 이동을 멈춘다. 결국, 핀(SHA)은 입력 깊이 값 3에 해당하는 핀 깊이를 가진다. 도 6은 본 발명의 실시예에 따른, 직렬로 배치된 복수의 디스플레이 소자를 나타내는 도면이다. 도 6에 예시된 바와 같이, 다수의 디스플레이 소자(DPEa, DPEb, DPEc, DPEd)가 직렬로 배치될 수 있다. 각 디스플레이 소자(DPEa~DPEd)는 핀(SHAa, SHAb, SHAc, SHAd)을 포함한다. 한편, 다수의 디스플레이 소자(DPEa~DPEd)는 도 6과는 다른 패턴으로 배치될 수도 있다. 핀 깊이를 가지는 핀(SHAa~SHAd)의 핀 포인트를 통해, 입체감 있는 영상이 표현될 수 있다. 도 7은 본 발명의 실시예에 따른, 디스플레이 소자의 핀에 적용될 수 있는 다양한 형태의 핀 머리 장식 부재(member)를 나타내는 도면이다. 핀(SHA)에 다양한 형태의 핀 머리 장식 부재가 적용될 수 있다. 이를 통해, 다양한 연출이 가능하다. 도 7에서 (a)는 일반 형태의 핀(SHA)의 정면 단면도를 나타낸다. 일반 형태의 핀(SHA)에는 추가적인 핀 머리 장식 부재가 적용되지 않는다. 도 7에서 (b)는 핀 머리 장식 부재(HE1)를 포함하는 핀(SHA)의 정면 단면도를 나타낸다. 핀 머리 장식 부재(HE1)는 구 형태 또는 타원 형태를 가질 수 있다. 도 7에서 (c)는 핀 머리 장식 부재(HE2)를 포함하는 핀(SHA)의 정면 단면도를 나타낸다. 핀 머리 장식 부재(HE2)는 구 형태 또는 타원 형태를 가질 수 있으며, 조명(예, LED(light emitting diode) 조명)을 포함할 수 있다.핀(SHA)은 핀 머리 장식 부재(HE1, HE2)에 삽입될 수 있다. 한편, 핀 머리 장식 부재(HE1, HE2)의 교체는 가능하다. 한편, 핀 머리 장식 부재(HE1, HE2)는 터치 센서, 인체 인식 센서, 또는 입력 센서 등을 포함할 수 있다. 핀(SHA)에 적용되는 핀 머리 장식 부재를 통해, 확장성을 가지는 화면이 구성될 수 있다. 도 8은 본 발명의 실시예에 따른, 디스플레이 소자의 핀에 구 형태의 핀 머리 장식 부재를 적용하는 방법을 나타내는 도면이다. 구체적으로, 도 8은 핀 머리 장식 부재(HE)와 핀(SHA)의 단면을 나타내는 도면이다. 핀 머리 장식 부재(HE)는 구 형태를 가질 수 있다. 핀 머리 장식 부재(HE)는 핀(SHA)의 삽입을 위한 공간을 가진다. 핀(SHA)은 핀 머리 장식 부재(HE)에 삽입될 수 있다. 도 9는 본 발명의 실시예에 따른, 디스플레이 소자의 구성과 디스플레이 소자를 운영하는 운영 장치를 나타내는 도면이다. 디스플레이 소자(DPE)는 적외선 센서(100), 컨트롤 모듈(110), 모터(113), 전원부(120), 및 IO(input output) 컨트롤러(117)를 포함한다. 적외선 센서(100)는 상술한 바와 같이, 마킹 스팟(MS)을 감지한다. 컨트롤 모듈(110)은 적외선 센서(100)의 감지 및 모터(113)의 구동을 제어한다. 구체적으로, 컨트롤 모듈(110)은 센서 로직부(111), 모터 컨트롤러(112), 로직 처리부(114), 데이터 처리부(115), 및 입출력부(116)을 포함할 수 있다. 센서 로직부(111)는 적외선 센서(100)에 의해 감지된 마킹 스팟(MS)을 카운트한다. 예를 들어, 핀(SHA)이 모터(113)에 의해 아래 방향으로 이동하는 경우에, 마킹 영역(MR)의 마킹 스팟(MS)도 아래 방향으로 이동하는데, 적외선 센서(100)는 아래 방향으로 이동하는 마킹 스팟(MS)을 감지하고, 센서 로직부(111)는 감지된 마킹 스팟(MS)의 개수를 카운트한다. 최종적으로 카운트된 마킹 스팟(MS)의 개수는 핀(SHA)의 깊이에 해당하므로, 핀(SHA)이 원하는 값만큼 이동하였는지가 확인될 수 있다. 모터 컨트롤러(112)는 모터(113)를 제어한다. 구체적으로, 모터 컨트롤러(112)는 모터(113)의 방향(정방향, 역방향)과 속도를 제어할 수 있다. 디스플레이 시스템은 모터(113)의 속도 제어를 통해, 동영상을 표현할 수도 있다. 모터(113)는 DC(direct current) 모터, AC(alternating current) 모터, 서보(servo) 모터, 스테퍼(stepper) 모터, 또는 기어드(geared) 모터 등일 수 있다. 로직 처리부(114)는 로직에 따른 다양한 입력 값에 기초해 적외선 센서(100)와 모터(113)를 제어한다. 로직 처리부(114)는 모터 컨트롤러(112)와 센서 로직부(111)를 통합적으로 제어한다. 로직 처리부(114)는 카운트된 마킹 스팟(MS)의 개수에 따라 모터 구동 명령을 모터 컨트롤러(112)에게 전송한다. 예를 들어, 로직 처리부(114)는 카운트된 마킹 스팟(MS)의 개수가 목표 값에 해당하는 경우에, 모터(113)의 구동을 멈출 것을 모터 컨트롤러(112)에게 명령할 수 있다. 데이터 처리부(115)는 입출력부(116)로부터 전달 받은 데이터를 로직 처리부(114)를 위한 실행 가능한 데이터로 변환한다. 입출력부(116)는 IO 컨트롤러(117)를 통해 데이터를 입력 받거나 데이터를 출력한다. 구체적으로 입출력부(116)는 운영 장치(130)로 하여금 USB(universal serial bus)를 통해 디스플레이 소자(DPE)를 제어할 수 있도록 하는 인터페이스를 지원할 수 있다. 입출력부(116)는 무선 네트워크(예, 와이파이, BLE(bluetooth low energy) 등)를 사용할 수 있는 확장성을 지원한다. IO 컨트롤러(117)는 운영 장치(130)로부터 전달 받은 데이터를 제어할 수 있는 인터페이스 장치(또는 인터페이스 모듈)이다. 컨트롤 모듈(110)의 로직은, IO 컨트롤러(117)를 통해 컨트롤 모듈(110)과 통신(예, USB 통신, 유무선 네트워크 통신 등)하는 운영 장치(130)에 의해 제어, 실행, 또는 업데이트될 수 있다. 전원부(120)는 전원(예, AC 전원, 내장 배터리, 또는 USB 전원 등)을 공급 받아, 디스플레이 소자(DPE)의 각 구성(예, 컨트롤 모듈(110) 등)에 전원을 공급한다. 한편, 전원부(120)는 디스플레이 소자(DPE)와 다른 외부 장치에 포함될 수도 있다. 운영 장치(130)는 디스플레이 소자(DPE)를 운영한다. 운영 장치(130)는 컨트롤 모듈(110)에 대한 로직을 처리할 수 있다. 구체적으로, 운영 장치(130)는 IO 컨트롤러(117)를 통해, 디스플레이 소자(DPE)의 컨트롤 모듈(110)과 유선 또는 무선으로 통신할 수 있다. 운영 장치(130)는 컨트롤 모듈(110)을 실행하거나 업데이트할 수 있다. 운영 장치(130)는 PC(personal computer)일 수 있다. 운영 장치(130)는 컨트롤러(131), 업로드 모듈(132), 외부 연동 모듈(133), 및 이미지 처리부(140)을 포함할 수 있다. 컨트롤러(131)는 컨트롤 모듈(110) 별 매칭 데이터(또는 디스플레이 소자(DPE) 별 매칭 데이터, 모터(113) 별 매칭 데이터, 핀(SHA) 별 매칭 데이터)를 생성한다. 여기서, 컨트롤 모듈(110) 별 매칭 데이터는, 디스플레이 소자(DPE) 또는 컨트롤 모듈(110)의 위치 값(좌표 값)과 컨트롤 모듈(110)에 의해 제어되는 핀(SHA)의 깊이 값을 포함할 수 있다. 운영 장치(130)에 의해 생성된 깊이 데이터가 디스플레이 소자(DPE)에 전달되면, 디스플레이 소자(DPE)는 전달받은 깊이 데이터를 마킹 스팟(MS)의 개수에 매칭할 수 있다. 운영 장치(130)에 의해 생성된 깊이 데이터는 핀(SHA) 별 다차원 배열에 매칭될 수 있다.만약 디스플레이 소자(DPE)의 컨트롤 모듈(110)이 하나의 모터(113)만을 제어한다면(즉, 컨트롤 모듈(110)과 모터(113)가 1:1 관계라면), 컨트롤러(131)는 모터(113) 별 매칭 데이터을 생성할 수 있다. 여기서, 모터(113) 별 매칭 데이터는 모터(113)(또는 핀(SHA))의 위치 값과 모터(113)에 연결된 핀(SHA)의 깊이 값을 포함할 수 있다. 한편, 하나의 컨트롤 모듈(110)에 의해 다수의 모터(113)가 제어될 수도 있는데(즉, 컨트롤 모듈(110)과 모터(113)가 1:N 관계), 이에 대해서는 도 15 내지 도 18을 참고하여 자세히 설명한다. 컨트롤러(131)는 컨트롤 프로그램을 포함할 수 있다. 업로드 모듈(132)은 컨트롤 모듈(110)이 사용할 수 있도록 로직 처리된 데이터(예, 로직 처리된 매칭 데이터)를 IO 컨트롤러(117)를 통해 컨트롤 모듈(110)에 전송한다. 외부 연동 모듈(133)은 외부 연계를 위한 API(application programming interface) 연동을 지원한다. 이미지 처리부(140)는 입력 영상을 흑백 영상으로 변환하고, 흑백 영상을 레벨화하여 깊이를 나타내는 데이터를 생성한다. 구체적으로, 이미지 처리부(140)는 흑백 영상의 픽셀 별 깊이 데이터(또는 영역 별 깊이 데이터)를 생성할 수 있다. 또는 이미지 처리부(140)는 흑백 영상을 소정 개수(예, 전체 모터(113)의 개수)의 분할 영상(또는 분할 구간, 분할 영역)으로 나누고, 분할 영상 별 깊이 데이터를 생성할 수 있다. 예를 들어, 디스플레이 시스템에 포함된 전체 모터(113)의 개수가 1200개(=40x30)인 경우에, 이미지 처리부(140)는 흑백 영상을 1200개(=40x30)개의 분할 영상으로 나누고, 분할 영상 별 깊이 데이터를 생성할 수 있다. 여기서, 1200개의 분할 영상 각각은 1200개의 모터(113) 각각에 대응할 수 있다. 한편, 이미지 처리부(140)는 입력 영상을 흑백 영상으로 변환하기 전에, 입력 영상을 소정 개수의 분할 영상으로 나눌 수도 있다. 이미지 처리부(140)에 의해 생성되는 깊이 데이터는 핀(SHA)의 핀 깊이를 직접적으로 나타내는 데이터이거나 핀(SHA)의 핀 깊이를 간접적으로 나타내는 데이터일 수 있다. 이미지 처리부(140)는 컨트롤 모듈(110), 적외선 센서(100), 및 모터(113)를 제어 또는 동작시키기 위한 데이터를 생성할 수 있다. 컨트롤러(131)는 이미지 처리부(140)에 의해 생성된 데이터를 이용해, 디스플레이 소자(DPE) 별 매칭 데이터(또는 컨트롤 모듈(110) 별 매칭 데이터, 모터(113) 별 매칭 데이터)를 생성할 수 있다. 이미지 처리부(140)에 대해서는 도 11을 참고하여 자세히 설명한다. 도 10은 본 발명의 실시예에 따른, 디스플레이 소자와 운영 장치를 포함하는 디스플레이 시스템을 나타내는 도면이다. 다수의 디스플레이 소자(DPE)가 설치된다. 예를 들어, 다수의 디스플레이 소자(DPE)는 어레이 형태(MxN)로 배치될 수 있다. 각 디스플레이 소자(DPE)는 핀(SHA)과 핀(SHA)의 이동을 위한 모터(113)를 포함한다. 운영 장치(130)는 디스플레이 소자(DPE) 또는 디스플레이 소자(DPE)의 컨트롤 모듈(110)에 대한 로직을 처리한다. 도 11은 본 발명의 실시예에 따른, 이미지 처리부의 구성을 나타내는 도면이다. 이미지 처리부(140)는 입력 영상을 흑백 영상으로 변환하고, 흑백 영상을 흑백 레벨화하여 흑백 레벨 데이터를 생성하고, 흑백 레벨 데이터를 이용해 모터(113) 별 핀 깊이 값을 생성할 수 있다. 구체적으로 이미지 처리부(140)는 이미지 로딩부(141), 흑백 변환부(142), 흑백 레벨 변환부(143), 깊이 변환부(144), 및 매칭 처리부(145)를 포함할 수 있다. 이미지 로딩부(141)는 입력 영상을 로딩하여 분석한다. 흑백 변환부(142)는 이미지 처리부(141)로부터 전달 받은 영상을 흑백 영상으로 변환한다. 흑백 레벨 변환부(143)는 흑백 영상으로부터 RGB 색을 추출하고, 추출된 RGB 색을 설정된 깊이 범위(예, 1~10)에 따라 흑백 레벨(gray scale)로 변환한다. 예를 들어, 디스플레이 시스템에 포함된 전체 모터(113)의 개수가 1200개(=400x300)인 경우에, 흑백 영상은 1200개(=40x30)개의 분할 영상으로 나누어질 수 있고, 흑백 레벨 변환부(143)는 각 분할 영상으로부터 RGB 색을 추출하고, 추출된 RGB 색 각각을 흑백 레벨로 변환할 수 있다. 깊이 변환부(144)는 흑백 레벨 변환부(143)로부터 전달 받은 흑백 레벨 값을 깊이 정보(예, 핀 깊이 값)로 변환한다. 예를 들어, 깊이 변환부(144)는 각 분할 영상의 흑백 레벨 값을 핀 깊이 값으로 변환할 수 있다. 매칭 처리부(145)는 깊이 변환부(144)로부터 전달 받은 핀 깊이 값 각각을 디스플레이 소자(DPE) 각각에 매칭한다. 구체적으로 매칭 처리부(145)는 핀 깊이 값을 각 컨트롤 모듈(110)의 위치(또는 각 핀(SHA)의 위치), 적외선 센서(100), 및 모터(113)의 속도 등을 매칭할 수 있다. 예를 들어, 매칭 처리부(145)는 각 분할 영상의 핀 깊이 값을 각 분할 영상에 대응하는 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA))에 매칭할 수 있다. 매칭 처리부(145)는 각 핀(SHA)의 위치에 기초해, 핀 깊이 값을 핀(SHA)에 각각 매칭할 수 있다. 매칭 처리부(145)는 위치 매칭부(146) 및 깊이 매칭부(147)를 포함할 수 있다. 위치 매칭부(146)는 각 컨트롤 모듈(110)의 위치 값을 각 컨트롤 모듈(110)에 매칭한다. 예를 들어, 디스플레이 소자(DPE)가 MxN 행렬로 배치된 경우에, 위치 매칭부(146)는 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA)) 각각에 위치 좌표 (m, n)를 매칭할 수 있다. 위치 매칭부(146)는 각 분할 영상을 각 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA))에 매칭할 수 있다. 깊이 매칭부(147)는 각 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA)) 별로 핀 깊이 값 그리고 모터(113)의 속도와 방향을 결정하여, 각 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA))에 매칭한다. 예를 들어, 깊이 매칭부(147)는 각 분할 영상의 핀 깊이 값을 각 분할 영상에 대응하는 디스플레이 소자(DPE)(또는 컨트롤 모듈(110), 모터(113), 핀(SHA))에 매칭할 수 있다. 모터(113)의 속도와 방향은 모터(113) 별로 설정될 수 있다. 도 12는 본 발명의 실시예에 따른, 디스플레이 소자를 통해 영상이 디스플레이되는 화면을 나타내는 도면이다. 다수의 디스플레이 소자(DPE)가 행렬 구조로 배치될 수 있다. 즉, 도 12에 예시된 바와 같이, 다수의 디스플레이 소자(DPE)의 핀(SHA)이 행렬 구조로 배치되는 핀 어레이는, 화면을 구성할 수 있다. 이미지 처리부(140)는 'KK' 문자를 포함하는 영상이 입력된 경우에, 입력 영상을 흑백 영상으로 변환하고, 흑백 영상을 디스플레이 소자(DPE)의 개수(또는 핀(SHA)의 개수)의 분할 영상(분할 구간)으로 나누고, 각 분할 영상의 흑백 레벨 값을 핀 깊이 값으로 변환하고, 각 분할 영상의 핀 깊이 값을 각 분할 영상에 대응하는 디스플레이 소자(DPE)(또는 핀(SHA))에 매칭할 수 있다. 각 디스플레이 소자(DPE)의 컨트롤 모듈(110)은 운영 장치(130)로부터 전달 받은 핀 깊이 값에 기초해, 모터(113)를 통해 핀(SHA)을 이동시킨다. 예를 들어, 각 디스플레이 소자(DPE)는 전달 받은 핀 깊이 값에 해당하는 개수의 마킹 스팟(MS)이 카운트될 때까지 핀(SHA)을 이동시킬 수 있다. 결국, 각 디스플레이 소자(DPE)의 핀(SHA)은 입력 깊이 값에 대응하는 핀 깊이를 가진다. 한편, 디스플레이 소자(DPE)가 핀 깊이 값과 함께 위치 좌표 값을 수신하는 경우에, 디스플레이 소자(DPE)는 수신된 위치 좌표 값을 이용해 수신된 핀 깊이 값 중 자신을 위한 핀 깊이 값을 판단하여 사용할 수 있다. 도 12에 예시된 바와 같이, 핀 깊이를 가지는 핀(SHA)을 통해, 'KK' 문자가 입체감 있게 표현될 수 있다. 도 13은 본 발명의 실시예에 따른, 디스플레이 소자를 통해 음각 및 양각을 표현하는 방법을 나타내는 도면이다. 다수의 디스플레이 소자(DPE)가 행렬 구조로 배치될 수 있다. 즉, 다수의 디스플레이 소자(DPE)의 핀(SHA)이 행렬 구조로 배치되어, 화면을 구성할 수 있다. 도 13에서, (a)는 음각으로 'K' 문자를 표현하는 방법을 나타내고, (b)는 양각으로 'K' 문자를 표현하는 방법을 나타낸다. 도 13의 (a)에서, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 큰 핀 깊이 값을 가진다. 즉, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 많이 안으로 들어간다. 도 13의 (b)에서, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 작은 핀 깊이 값을 가진다. 즉, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 많이 밖으로 나온다. 도 14는 본 발명의 실시예에 따른, 빛 세기를 조절하여 영상을 표현하는 방법을 나타내는 도면이다. 다수의 디스플레이 소자(DPE)가 행렬 구조로 배치될 수 있다. 즉, 다수의 디스플레이 소자(DPE)의 핀(SHA)이 행렬 구조로 배치되어, 화면을 구성할 수 있다. 디스플레이 시스템은 핀(SHA)의 핀 깊이 대신에 핀(SHA)의 조명 세기를 조절하여, 영상을 표현할 수도 있다. 이 경우에, 핀(SHA)의 핀 머리는 조명(예, LED 조명)을 포함한다. 도 14에 예시된 바와 같이, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 큰 조명 세기 값을 가질 수 있다. 또는 이와 반대로, 'K' 문자에 대응하는 다수의 핀(SHA)은 나머지 핀(SHA)들 보다 더 작은 조명 세기 값을 가질 수 있다. 디스플레이 시스템은 다수의 핀(SHA)의 조명 세기를 다양하게 조절함으로써, 입체감을 가지는 다양한 영상을 표현할 수 있다. 2. 모터 드라이버 어레이 지금까지 하나의 디스플레이 소자(DPE)의 컨트롤 모듈(110)이 하나의 모터(113) 또는 하나의 핀(SHA)을 제어하는 경우를 예로 들어, 본 발명의 실시예를 설명하였다. 이하에서는, 다수의 모터(113)가 행렬 구조로 배치된 모터 어레이를 하나의 컨트롤 보드를 통해 제어하는 방법 및 장치를, 도 15 내지 도 18을 참고하여 설명한다. 도 15는 본 발명의 실시예에 따른, 모터 드라이버 어레이를 제어하는 메인 컨트롤 보드를 나타내는 도면이다. 메인 컨트롤 보드(200)는 모터 드라이버 어레이를 제어한다. 여기서, 모터 드라이버 어레이는 행렬 구조로 배치된 다수의 모터 드라이버를 포함할 수 있다. 모터 드라이버 어레이에 대해서는 도 16 내지 도 18을 참고하여 자세히 설명한다. 구체적으로 메인 컨트롤 보드(200)는 J-TAG 부(201), 리셋부(202), 다운로드부(203), DC Jack 부(204), LDO 부(205), 파워 스위치부(206), UART 트랜시버(207), UART(208), USB 장치(209), 저장 장치(210), SPI 부(211, 212), 이더넷 PHY 부(213), RJ45 커넥터(214), 및 프로세서(215)를 포함할 수 있다. 프로세서(215)는 메인 컨트롤 보드(200)와 드라이버 보드 각각의 인터페이스 통신, 모터(113) 구동, 및 핀(SHA) 구동의 감지 등을 제어한다. 드라이버 보드는 모드 드라이버 어레이가 배치된 보드이다. 프로세서(215)는 Cortex M4 계열의 32 bit 마이크로 프로세서일 수 있다. 저장 장치(210)는 보조 메모리 장치이다. 저장 장치(210)는 3차원(3D) 핀 화면으로 구현하고자 하는 영상, 그리고 영상에 대한 ADC(analog to digital converter) 값을 저장할 수 있다. 저장 장치(210)는 NAND 플래시 메모리일 수 있다. 이더넷 PHY 부(213)는 RJ45 커넥터(214)를 통한 TCP/IP(transfer control protocol/internet protocol) 기반의 통신을 위하여, 프로세서(215)와의 물리적 데이터 통신을 수행하는 하드웨어 칩셋이다. 입니다. LDO(low drop out) 부(205)는 메인 컨트롤 보드(200)의 전원 공급을 수행하는 칩셋이다. LDO 부(205)는 DC Jack 부(204)를 통해 5V를 공급받고, 이를 3.3V로 변환하여 메인 컨트롤 보드(200)의 각 구성(예, 프로세서(215), 저장 장치(210) 등)에 안정적인 전원을 공급한다. LDO 부(205)는 전원의 리플(ripple) 등이 적어, 전원을 안정적으로 공급할 수 있다. UART(universal asynchronous receiver/transmitter) 트랜시버(207)는, 프로세서(215)와 외부 인터페이스 간의 송수신 시리얼 통신이 왜곡 없이 이루어지도록 하기 위하여, 송수신 간의 신호를 증폭하는 기능을 수행한다.UART(208)는 UART 커넥터이다. J-TAG 부(201)는 시스템의 디버깅 및 다운로드를 위한 인터페이스이다. USB 장치(209)는 USB 통신을 수행하며, 외부 인터페이스와의 통신을 위한 보조 인터페이스이다. SPI(serial peripheral interface) 부(211, 212)는, 시스템 간에 마스터와 슬레이브를 설정하여, 상위단과 하위단의 데이터를 송수신하는 인터페이스이다. SPI 통신에 있어서, 마스터와 슬레이브는 상위단과 하위단으로 구분될 수 있다. 예를 들어, SPI 부(212)는 마스터 SPI로 설정되고 SPI 부(211)는 슬레이브 SPI로 설정될 수 있다. 리셋부(202)는 메인 컨트롤 보드(200)의 리셋을 수행한다. 다운로드부(203)는 다운로드 기능을 수행한다. 구체적으로, 다운로드부(203)는 ST 마이크로일렉트로닉스(Microelectronics) 계열(예, Intel, Qualcomm 등) CPU 다운로드를 수행할 수 있다. 파워 스위치부(206)는 메인 컨트롤 보드(200)의 전원을 온/오프하는 기능을 수행한다. 한편, 운영 장치(130)는 영상 처리 결과 데이터와 영상 명암을 나타내는 ADC 값을 RJ45 커넥터(214)를 통해, 메인 컨트롤 보드(200)에 전송할 수 있다. 운영 장치(130)로부터 전달 받은 데이터는 저장 장치(210)에 저장될 수 있고, 필요(상황)에 따라 저장 장치(210)로부터 해당 데이터는 읽어져 모터(113) 구동 시 사용될 수 있다. 도 16은 본 발명의 실시예에 따른, 메인 컨트롤 보드, 드라이버 보드, 및 모터 어레이를 포함하는 디스플레이 시스템을 나타내는 도면이다. 디스플레이 시스템(1000)은 메인 컨트롤 보드(200), 드라이버 보드(300), 파워 공급 장치(400), 및 모터 어레이(500)을 포함한다. 메인 컨트롤 보드(200)는 드라이버 보드(300)를 제어한다. 드라이버 보드(300)는 다수의 모터 드라이버(310)를 포함한다. 다수의 모터 드라이버(310)는 행렬 구조로 배치되어, 모터 드라이버 어레이를 구성할 수 있다. 각 모터 드라이버(310)는 제어 신호를 이용해, 자신에 대응하는 모터(113)를 구동시킬 수 있다. 모터 드라이버(310)는 도 9의 모터 컨트롤러(112)와 동일 또는 유사한 기능을 수행할 수 있다. 한편, 드라이버 보드(300)는 모터 드라이버(310)를 제어하는 컨트롤 모듈(110)을 포함할 수 있다. 예를 들어, 드라이버 보드(300)는 다수의 모터 드라이버(310) 각각을 제어하는 다수의 컨트롤 모듈(110)을 포함할 수 있다. 드라이버 보드(300)에 포함되는 컨트롤 모듈(110)은 도 9의 컨트롤 모듈(110)과 동일 또는 유사한 기능을 수행할 수 있다. 파워 공급 장치(400)는 드라이버 보드(300)에 파워를 공급한다. 파워 공급 장치(400)는 SMPS(switching mode power supply) 장치일 수 있다. 모터 어레이(500)는 행렬 구조로 배치되는 다수의 모터(113)를 포함한다. 각 모터(113)는 적어도 하나의 핀(SHA)을 이동시킨다. 모터 어레이(500)의 각 모터(113)는 드라이버 보드(300)의 각 모터 드라이버(310)에 의해 구동될 수 있다. 모터 드라이버(310)와 모터(113)는 일대일 관계이거나 일대다 관계일 수 있다. 예를 들어, 모터 드라이버(310)와 모터(113) 간의 관계가 일대일 관계인 경우에, 드라이버 보드(300)는 모터 어레이(500)에 포함된 모터(113)의 개수와 동일한 개수의 모터 드라이버(310)를 포함할 수 있다. 디스플레이 시스템(1000)은 운영 장치(130)에 의해 제어, 실행, 또는 업데이트될 수 있다. 예를 들어, 디스플레이 시스템(1000)은 운영 장치(130)로부터 데이터(예, 깊이 데이터)를 수신할 수 있다. 도 17은 본 발명의 실시예에 따른, 드라이버 보드를 나타내는 도면이다. 드라이버 보드(300)는 다수의 모터 드라이버(310a1~310a7, 310b1~310b7, 310c1~310c7, 310d1~310d7, 310e1~310e7), 보드 커넥터(320a, 320b), 로드 SW 부(330a, 330b, 330c, 330d, 330e), SW 부(340), DC IN 부(350), 및 DC/DC 부(360)를 포함할 수 있다. 도 17에는, 드라이버 보드(300)가 5x7 개의 모터 드라이버(310a1~310e7)를 포함하는 경우가 예시되어 있다. 각 모터 드라이버(310a1~310e7)는 자신에 해당하는 모터(113)를 구동시킨다. 드라이버 보드(300)는 보드 커넥터(320a, 320b)를 통해, 메인 컨트롤 보드(200)와 연결될 수 있다. 드라이버 보드(300)는 메인 컨트롤 보드(200)와 분리될 수 있다. 향후에 모터(113)의 사이즈가 변경되거나 모터(113)의 구동 전압 및 구동 전류가 변경되는 경우에, 이러한 변경에 맞는 드라이버 보드(300)가 설계되어 메인 컨트롤 보드(200)에 연결될 수 있다. 로드 SW 부(330a, 330b, 330c, 330d, 330e)는 전원을 분기하는 기능을 수행한다. SW 부(340)는 메인 전원을 온/오프하는 기능을 수행한다. DC IN 부(350)는 외부 SMPS 장치(예, 400)로부터 메인 전원을 공급받는 기능을 수행한다. DC/DC 부(360)는 메인 전원에 대한 다운 컨버팅(down converting)을 수행한다. 도 18은 본 발명의 실시예에 따른, 복수의 모터 어레이를 제어하는 디스플레이 시스템을 나타내는 도면이다. 디스플레이 시스템(1000)은 다수의 모터 어레이(500a, 500b, 500c, 500d), 다수의 드라이버 보드(300a, 300b, 300c, 300d), 및 다수의 메인 컨트롤 보드(200a, 200b, 200c, 200d)를 포함할 수 있다. 다수의 모터 어레이(500a~500d)는 행렬 구조로 배치될 수 있다. 즉, 다수의 모터 어레이(500a~500d)에 의해 움직이는 다수의 핀(SHA)은 행렬 구조로 배치될 수 있다. 모터 어레이(500a~500d) 각각은 핀 어레이 각각에 대응한다. 핀 어레이 각각은 다수의 핀(SHA)을 포함한다. 다수의 핀 어레이의 조합에 의해, 화면이 구성될 수 있다. 입력 영상(또는 입력 영상으로부터 변환된 흑백 영상)은 소정의 개수에 기초해 복수의 분할 영상으로 나뉠 수 있고, 복수의 분할 영상 별 깊이 데이터가 생성될 수 있다. 여기서 소정의 개수는, 다수의 핀 어레이에 포함되는 핀(SHA)의 전체 개수, 또는 다수의 모터 어레이(500a~500d)에 포함되는 모터(113)의 전체 개수일 수 있다. 하나의 모터 어레이(500a~500d), 하나의 드라이버 보드(300a~300d), 하나의 메인 컨트롤 보드(200a~200d)는 하나의 조합을 이룬다. 예를 들어, 메인 컨트롤 보드(200a)는 드라이버 보드(300a)를 제어하고, 드라이버 보드(300a)는 메인 컨트롤 보드(200a)의 제어에 기초해 모터 어레이(500a)를 구동시킨다. 예를 들어, 입력 영상의 영역들 중 모터 어레이(500a)를 위한 다수의 제1 영역은 흑백으로 변환되고, 흑백 변환된 다수의 제1 영역의 흑백 레벨 데이터에 기초해 다수의 깊이 데이터가 생성될 수 있다. 메인 컨트롤 보드(200a)는 상기 다수의 깊이 데이터에 기초해 드라이버 보드(300a)를 제어할 수 있다. 즉, 메인 컨트롤 보드(200a)는 다수의 제1 영역의 흑백 레벨에 대응하는 다수의 핀 깊이를 모터 어레이(500a)를 위한 핀 어레이가 가지도록, 드라이버 보드(300a)를 제어할 수 있다. 도 18에 예시된 바와 같이, 디스플레이 시스템(1000)은 다수의 드라이버 보드(300a~300d)를 이용해, 다양한 핀 디스플레이 화면을 구성할 수 있다. 지금까지 본 발명의 실시예에 따른, 핀(SHA)을 이용한 디스플레이 소자(DPE)와 디스플레이 시스템(1000)에 대해서 설명하였다. 다수의 모터(113)를 포함하는 모터 어레이(500)가 설치될 수 있다. 메인 컨트롤 보드(200)와 모터 드라이버 보드(300)는 분리될 수 있다. 이를 통해, 모터 드라이버 보드(300)에 다양한 사이즈 및 다양한 종류의 모터(113)가 적용될 수 있다. 디스플레이 시스템(1000)은 UART, USB 확장 포트, 또는 무선 인터페이스(예, 와이파이, 블루투스, 지그비, LoRA(long range), LTE(long term evolution) 등)를 이용한 제어가 가능하도록, 설계될 수 있다. 예를 들어, 디스플레이 시스템(1000)은 UART, USB, 및 무선 네트워크 중 적어도 하나를 통해 통신하는 운영 장치(130)에 의해 제어, 실행, 또는 업데이트될 수 있다. 모터(113)는 듀얼 샤프트(dual shaft)와 다이폴 샤프트(dipole shaft)를 이용할 수(가질 수) 있는 구조로, 설계될 수 있다. 다이폴 샤프트 모터(113)는 단방향 축을 가진 모터이다. 듀얼 샤프트 모터(113)는 양방향 축을 가진 모터이며, 샤프트 축을 기준으로 구동할 수 있다. 디스플레이 시스템(1000)에서 적외선 센서(100) 또는 모터 회전 센서는 모터(113)의 구동을 감지하여, 핀(SHA)의 위치 제어를 위한 오차 범위를 최소화할 수 있다. 모터(113)는 제어 신호에 기초해, 정량만큼 정확하게 구동될 수 있다. 적외선 센서(100) 또는 모터 회전 센서는 모터 어레이(500), 드라이버 보드(300), 또는 컨트롤 보드(200)에 포함될 수 있다. 예를 들어, 모터 어레이(500)에 의해 움직이는 다수의 핀(SHA) 중 제1 핀(SHA)이 이동하는 경우에, 제1 핀(SHA)을 위한 마킹 영역(MR)의 마킹 스팟(MS)도 함께 이동한다. 이 때, 적외선 센서(100)는 기준 영역(R3)을 통과하는 마킹 스팟(MS)을 감지한다. 제1 핀(SHA)을 위한 모터 드라이버(310)는 감지된 마킹 스팟(MS)의 개수가 제1 핀(SHA)을 위한 입력 깊이 값에 해당하는 경우에, 제1 핀(SHA)을 위한 모터(113)의 구동을 멈춘다. 다른 예를 들어, 모터 어레이(500)에 의해 움직이는 다수의 핀(SHA) 중 제1 핀(SHA)이 이동하는 경우에, 모터 회전 센서는 제1 핀(SHA)을 위한 모터(113)의 회전 수를 감지한다. 제1 핀(SHA)을 위한 모터 드라이버(310)는 감지된 회전 수가 제1 핀(SHA)을 위한 입력 깊이 값에 해당하는 경우에, 제1 핀(SHA)을 위한 모터(113)의 구동을 멈춘다. 디스플레이 시스템(1000)은 SPI 통신을 수행하는 단품 간 마스터 SPI와 슬레이브 SPI가 MISO(master input slave output), MOSI(master output slave input) 제어에 의해 초기화 및 동기화될 수 있도록, 설계될 수 있다. 예를 들어, 전체 메인 컨트롤 보드들(200)과 전체 드라이버 보드들(300)은 초기화 및 동기화될 수 있다. 이하에서는 본 발명의 실시예에 따른 디스플레이 시스템이 영상을 디스플레이하는 방법에 대해서 설명한다. 디스플레이 시스템은 입력 영상의 흑백 레벨에 대응하는 깊이 데이터를 수신한다. 예를 들어, 디스플레이 시스템은 UART, USB, 및 무선 네트워크 중 적어도 하나를 통해 깊이 데이터를 운영 장치(130)로부터 수신할 수 있다. 여기서, 입력 영상은 디스플레이 시스템에 포함되는 핀(SHA)의 전체 개수에 기초해 다수의 분할 영역으로 분할될 수 있고, 깊이 데이터는 다수의 분할 영역 별 흑백 레벨에 대응할 수 있다. 디스플레이 시스템은 깊이 데이터에 기초해 핀(SHA)을 모터(113)를 통해 이동시킨다. 디스플레이 시스템은 깊이 데이터에 대응하는 핀 깊이를 핀(SHA)이 가지는 경우에, 모터(113)의 구동을 멈춘다. 예를 들어, 디스플레이 시스템은 핀(SHA)과 함께 이동하는 마킹 영역(MR)에 포함된 복수의 마킹 스팟(MS) 중 기준 영역(R3)을 통과하는 마킹 스팟(MS)을 감지하고, 감지된 마킹 스팟의 개수가 깊이 데이터에 대응하는 경우에, 모터(113)의 구동을 멈출 수 있다. 다른 예를 들어, 디스플레이 시스템은 모터(113)의 회전 수를 감지하고, 감지된 회전 수가 깊이 데이터에 대응하는 경우에, 모터(113)의 구동을 멈출 수 있다. 한편, 본 발명의 실시예는 지금까지 설명한 장치 및/또는 방법을 통해서만 구현되는 것은 아니며, 본 발명의 실시예의 구성에 대응하는 기능을 실현하는 프로그램 또는 그 프로그램이 기록된 기록 매체를 통해 구현될 수도 있으며, 이러한 구현은 상술한 실시예의 기재로부터 본 발명이 속하는 기술 분야의 당업자라면 쉽게 구현할 수 있는 것이다. 이상에서 본 발명의 실시예에 대하여 상세하게 설명하였지만 본 발명의 권리범위는 이에 한정되는 것은 아니고 다음의 청구범위에서 정의하고 있는 본 발명의 기본 개념을 이용한 당업자의 여러 변형 및 개량 형태 또한 본 발명의 권리범위에 속하는 것이다. A display device is provided. The display device comprises: a rod-shaped first pin having a pin depth representing the distance from a reference point to a pin point; a motor for moving the first pin in at least one direction from among a first direction towards the reference point and a second direction that is the opposite to the first direction; and a controller for controlling the driving of the motor such that the first pin has a first pin depth corresponding to the black and white level of a first region from among regions of an image. 기준점으로부터 핀 포인트까지의 거리를 나타내는 핀 깊이를 가지는 막대 형태의 제1 핀; 상기 제1 핀을 상기 기준점을 향하는 제1 방향 및 상기 제1 방향의 반대인 제2 방향 중 적어도 하나의 방향으로 이동시키는 모터; 및 영상의 영역들 중 제1 영역의 흑백 레벨에 대응하는 제1 핀 깊이를 상기 제1 핀이 가지도록, 상기 모터의 구동을 제어하는 컨트롤러 를 포함하는 디스플레이 소자. 제1항에 있어서, 소정의 간격을 가지는 복수의 마킹 스팟(marking spot)을 포함하며 상기 제1 핀과 함께 이동하는 마킹 영역; 및 상기 마킹 영역이 이동하는 경우에, 상기 복수의 마킹 스팟 중 기준 영역을 통과하는 마킹 스팟을 감지하는 센서를 더 포함하고, 상기 컨트롤러는 상기 감지된 마킹 스팟의 개수가 상기 제1 핀 깊이에 대응하는 경우에, 상기 모터의 구동을 멈추는 디스플레이 소자. 제2항에 있어서, 상기 마킹 영역에 포함되는 마킹 스팟의 개수는, 상기 제1 핀이 가질 수 있는 핀 깊이의 범위를 나타내는 깊이 범위에 기초해 조정되는 디스플레이 소자. 제1항에 있어서, 상기 모터의 회전 수를 감지하는 센서를 더 포함하고, 상기 컨트롤러는 상기 감지된 회전 수가 상기 제1 핀 깊이에 대응하는 경우에, 상기 모터의 구동을 멈추는 디스플레이 소자. 제1항에 있어서, 상기 컨트롤러는, 입력 받은 속도에 기초해 상기 모터의 속도를 조정하는 디스플레이 소자. 제1항에 있어서, 상기 제1 핀은, 소정의 형태를 가지는 머리 장식 부재(member)의 삽입 공간에 삽입되는 디스플레이 소자. 제1항에 있어서, 상기 모터는, DC(direct current) 모터, AC(alternating current) 모터, 서보(servo) 모터, 스테퍼(stepper) 모터, 및 기어드(geared) 모터 중 하나인 디스플레이 소자. 제1항에 있어서, 상기 컨트롤러는, USB(universal serial bus) 및 네트워크 중 적어도 하나를 통해 외부 장치로부터 상기 제1 핀 깊이를 위한 제1 깊이 데이터를 수신하는 디스플레이 소자. 제8항에 있어서, 상기 외부 장치는, 상기 영상을 흑백 영상으로 변환하고, 상기 흑백 영상을 흑백 레벨화하여 흑백 레벨 데이터를 생성하고, 상기 흑백 레벨 데이터를 이용해 상기 제1 깊이 데이터를 포함하는 복수의 깊이 데이터를 생성하는 디스플레이 소자. 제9항에 있어서, 상기 제1 핀은 복수의 핀이 행렬 구조로 배치되는 핀 어레이에 포함되고, 상기 외부 장치는, 상기 핀 어레이에 포함되는 핀의 개수에 기초해 상기 흑백 영상을 복수의 분할 영역으로 나누고, 상기 복수의 분할 영역 별로 상기 흑백 레벨 데이터를 생성하고, 상기 복수의 분할 영역 별 흑백 레벨 데이터를 이용해 상기 복수의 깊이 데이터를 생성하는 디스플레이 소자. 제9항에 있어서, 상기 제1 핀은 복수의 핀이 행렬 구조로 배치되는 핀 어레이에 포함되고, 상기 외부 장치는, 상기 복수의 핀의 위치에 기초해 상기 복수의 깊이 데이터를 상기 복수의 핀 각각에 매칭하는 디스플레이 소자. 복수의 제1 핀을 포함하는 제1 핀 어레이; 상기 복수의 제1 핀의 이동을 위한 복수의 제1 모터를 포함하는 제1 모터 어레이; 상기 제1 모터 어레이의 구동을 위한 복수의 제1 모터 드라이버를 포함하는 제1 드라이버 보드; 및 영상의 영역들 중 상기 복수의 제1 핀을 위한 복수의 제1 영역의 흑백 레벨에 대응하는 복수의 제1 핀 깊이를 상기 복수의 제1 핀이 가지도록, 상기 제1 드라이버 보드를 제어하는 제1 제어 보드 를 포함하는 디스플레이 시스템. 제12항에 있어서, 상기 제1 드라이버 보드는, 보드 커넥터를 통해 상기 제1 제어 보드와 연결되거나 분리되는 디스플레이 시스템. 제12항에 있어서, 복수의 제2 핀의 이동을 위한 복수의 제2 모터를 포함하는 제2 모터 어레이; 상기 제2 모터 어레이의 구동을 위한 복수의 제2 모터 드라이버를 포함하는 제2 드라이버 보드; 및 상기 영상의 영역들 중 상기 복수의 제2 핀을 위한 복수의 제2 영역의 흑백 레벨에 대응하는 복수의 제2 핀 깊이를 상기 복수의 제2 핀이 가지도록, 상기 제2 드라이버 보드를 제어하는 제2 제어 보드를 더 포함하고, 상기 복수의 제2 영역은 상기 복수의 제1 영역과 다른 디스플레이 시스템. 제12항에 있어서, 상기 제1 제어 보드는, UART(universal asynchronous receiver/transmitter), USB(universal serial bus), 및 무선 네트워크 중 적어도 하나를 통해 통신하는 외부 장치에 의해 제어되는 디스플레이 시스템. 제12항에 있어서, 상기 복수의 제1 모터는, 다이폴 샤프트(dipole shaft)와 듀얼 샤프트(dual shaft) 중 적어도 하나를 가지는 디스플레이 시스템. 제12항에 있어서, 상기 복수의 제1 영역은 흑백으로 변환되고, 상기 흑백 변환된 복수의 제1 영역의 흑백 레벨 데이터에 기초해 상기 복수의 제1 핀 깊이를 위한 복수의 제1 깊이 데이터가 생성되고, 상기 제1 제어 보드는, 상기 복수의 제1 깊이 데이터에 기초해 상기 복수의 제1 모터 드라이버를 제어하는 디스플레이 시스템. 제12항에 있어서, 상기 복수의 제1 모터의 회전 수를 감지하는 센서를 더 포함하고, 상기 복수의 제1 모터 드라이버는, 상기 복수의 제1 모터 각각의 회전 수가 상기 복수의 제1 핀 깊이 각각에 대응하는 경우에, 상기 복수의 제1 모터 각각의 구동을 멈추는 디스플레이 시스템. 제12항에 있어서, 제1 마킹 영역이 상기 복수의 제1 핀 중 하나와 함께 이동하는 경우에, 상기 제1 마킹 영역에 포함된 복수의 마킹 스팟 중 기준 영역을 통과하는 마킹 스팟을 감지하는 센서를 더 포함하고, 상기 복수의 제1 모터 드라이버 중 하나는, 상기 감지된 마킹 스팟의 개수가 상기 복수의 제1 핀 깊이 중 상기 제1 마킹 영역과 함께 이동하는 제1 핀을 위한 제1 핀 깊이에 대응하는 경우에, 상기 복수의 제1 모터 중 상기 제1 마킹 영역과 함께 이동하는 제1 핀을 위한 제1 모터의 구동을 멈추는 디스플레이 시스템. 제12항에 있어서, 상기 제1 핀 어레이는 복수의 핀 어레이에 포함되고, 상기 영상은 상기 복수의 핀 어레이에 포함되는 핀의 전체 개수에 기초해 복수의 분할 영역으로 분할되고, 상기 복수의 분할 영역은 상기 복수의 제1 영역을 일부로써 포함하는 디스플레이 시스템. 디스플레이 시스템이 영상을 디스플레이하는 방법으로서, 상기 영상의 흑백 레벨에 대응하는 깊이 데이터를 수신하는 단계; 상기 깊이 데이터에 기초해 핀을 모터를 통해 이동시키는 단계; 및 상기 깊이 데이터에 대응하는 핀 깊이를 상기 핀이 가지는 경우에, 상기 모터의 구동을 멈추는 단계를 포함하며, 상기 핀의 핀 깊이는 기준점으로부터 상기 핀의 핀 포인트까지의 거리를 나타내는 디스플레이 시스템의 디스플레이 방법. 제21항에 있어서, 상기 모터의 구동을 멈추는 단계는, 상기 핀과 함께 이동하는 마킹 영역에 포함되는 복수의 마킹 스팟 중 기준 영역을 통과하는 마킹 스팟을 감지하는 단계; 및 상기 감지된 마킹 스팟의 개수가 상기 깊이 데이터에 대응하는 경우에, 상기 모터의 구동을 멈추는 단계를 포함하는 디스플레이 시스템의 디스플레이 방법. 제21항에 있어서, 상기 모터의 구동을 멈추는 단계는, 상기 모터의 회전 수를 감지하는 단계; 및 상기 감지된 회전 수가 상기 깊이 데이터에 대응하는 경우에, 상기 모터의 구동을 멈추는 단계를 포함하는 디스플레이 시스템의 디스플레이 방법. 제21항에 있어서, 상기 영상은 상기 디스플레이 시스템에 포함되는 핀의 전체 개수에 기초해 다수의 분할 영역으로 분할되고, 상기 깊이 데이터는 상기 다수의 분할 영역 별 흑백 레벨에 대응하는 디스플레이 시스템의 디스플레이 방법. 제21항에 있어서, 상기 깊이 데이터를 수신하는 단계는, UART(universal asynchronous receiver/transmitter), USB(universal serial bus), 및 무선 네트워크 중 적어도 하나를 통해 상기 깊이 데이터를 수신하는 단계를 포함하는 디스플레이 시스템의 디스플레이 방법.