Verfahren zur Röntgenbildkorrektur sowie zugehöriger Röntgen-CT-Scanner und Speicherträger
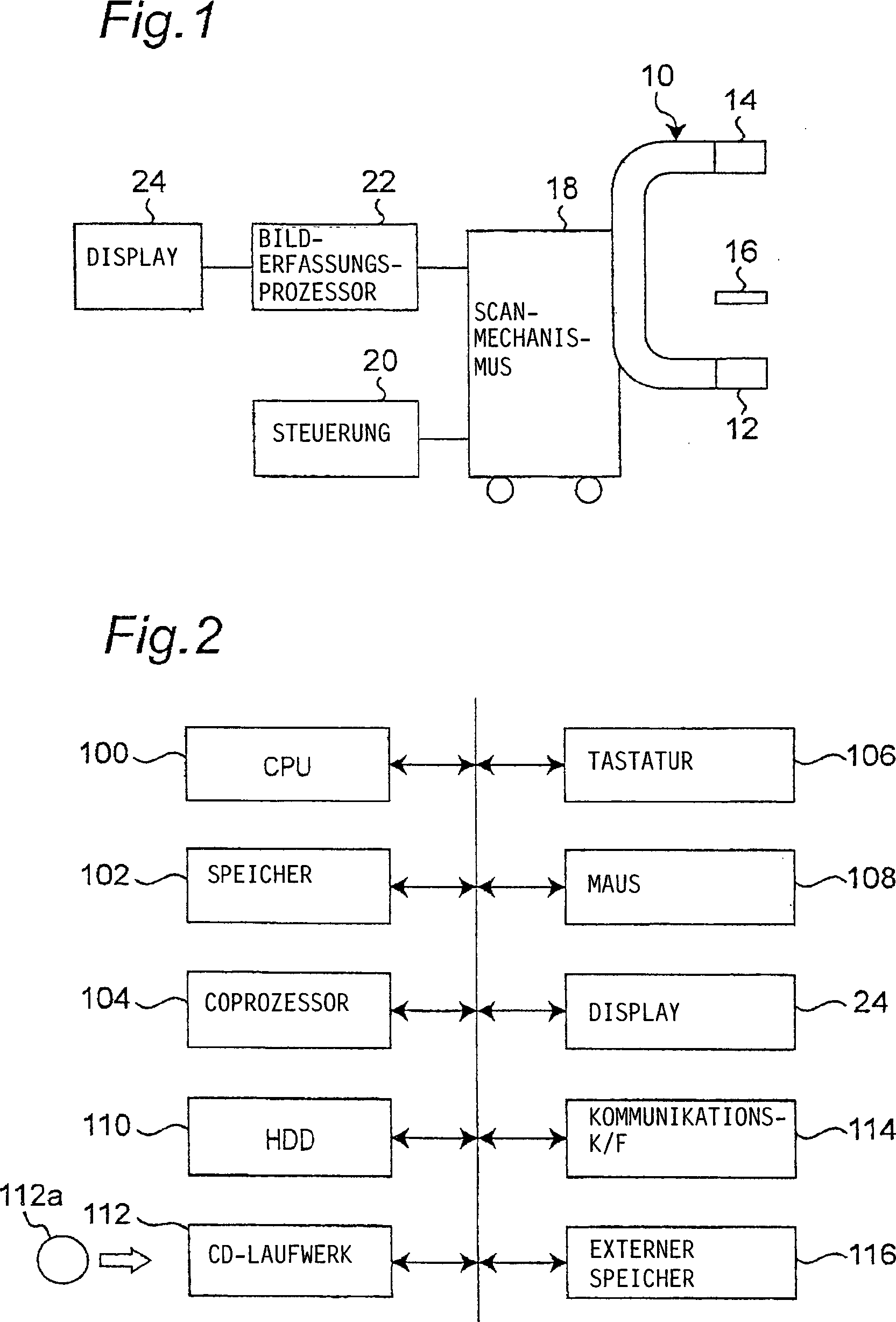
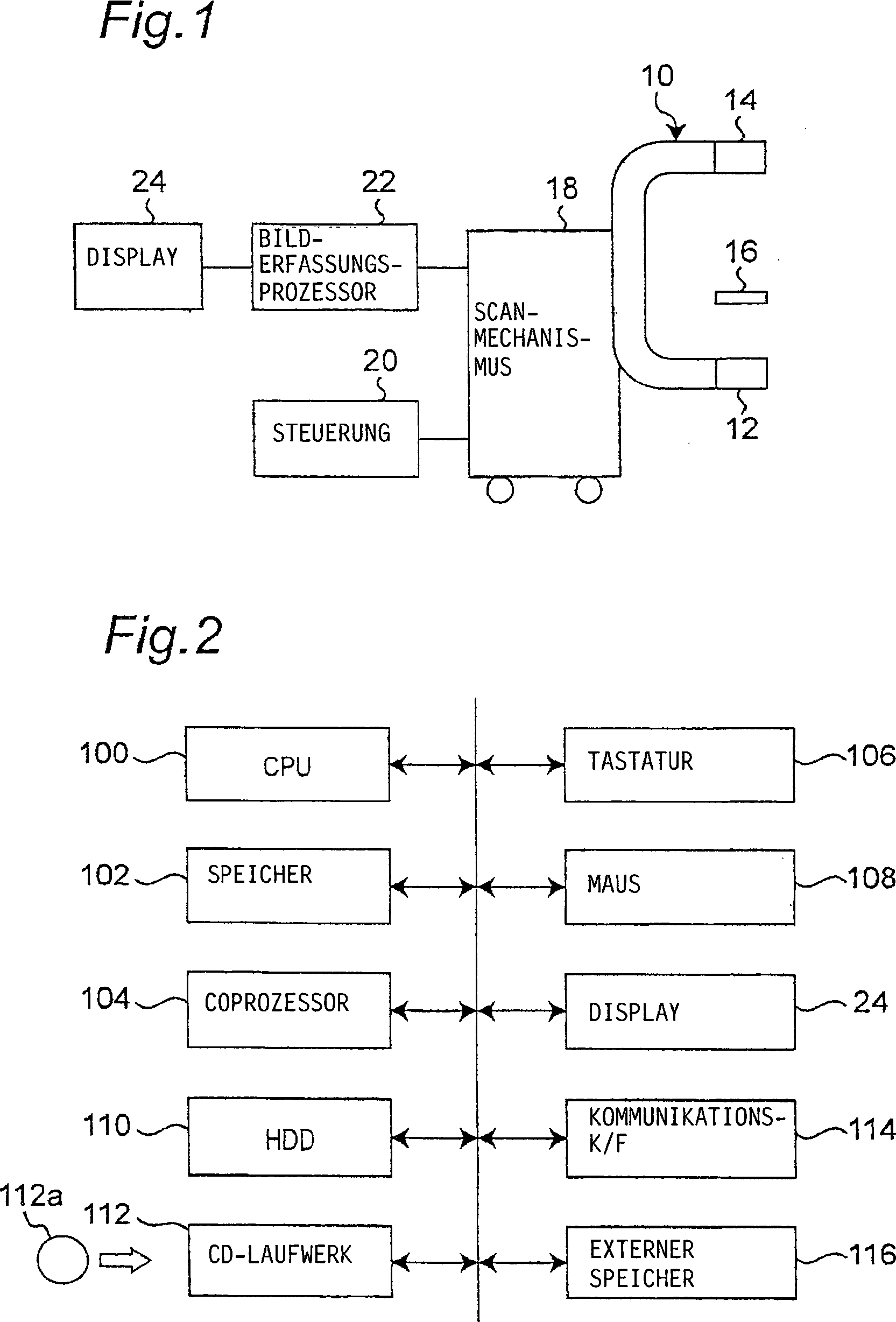
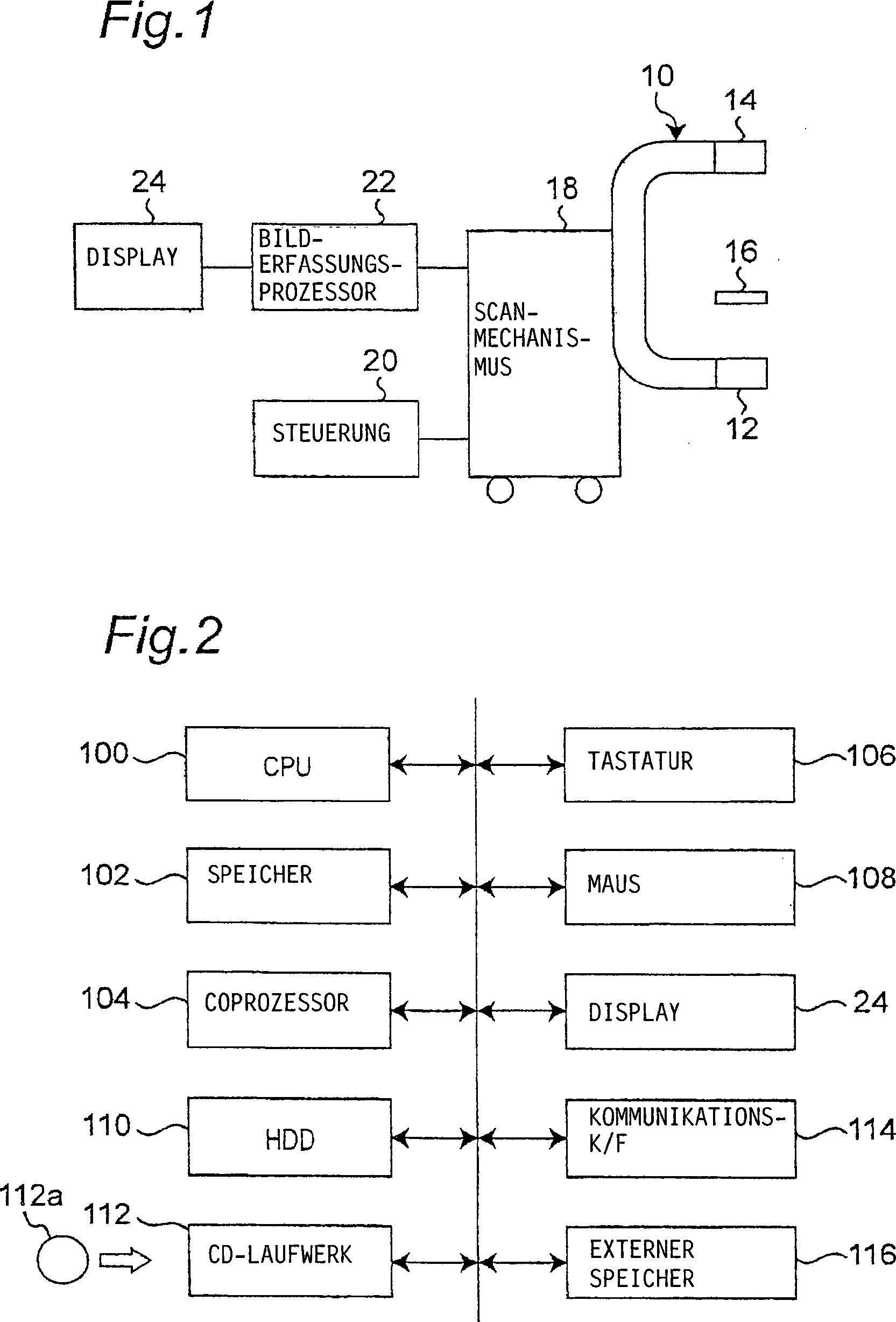
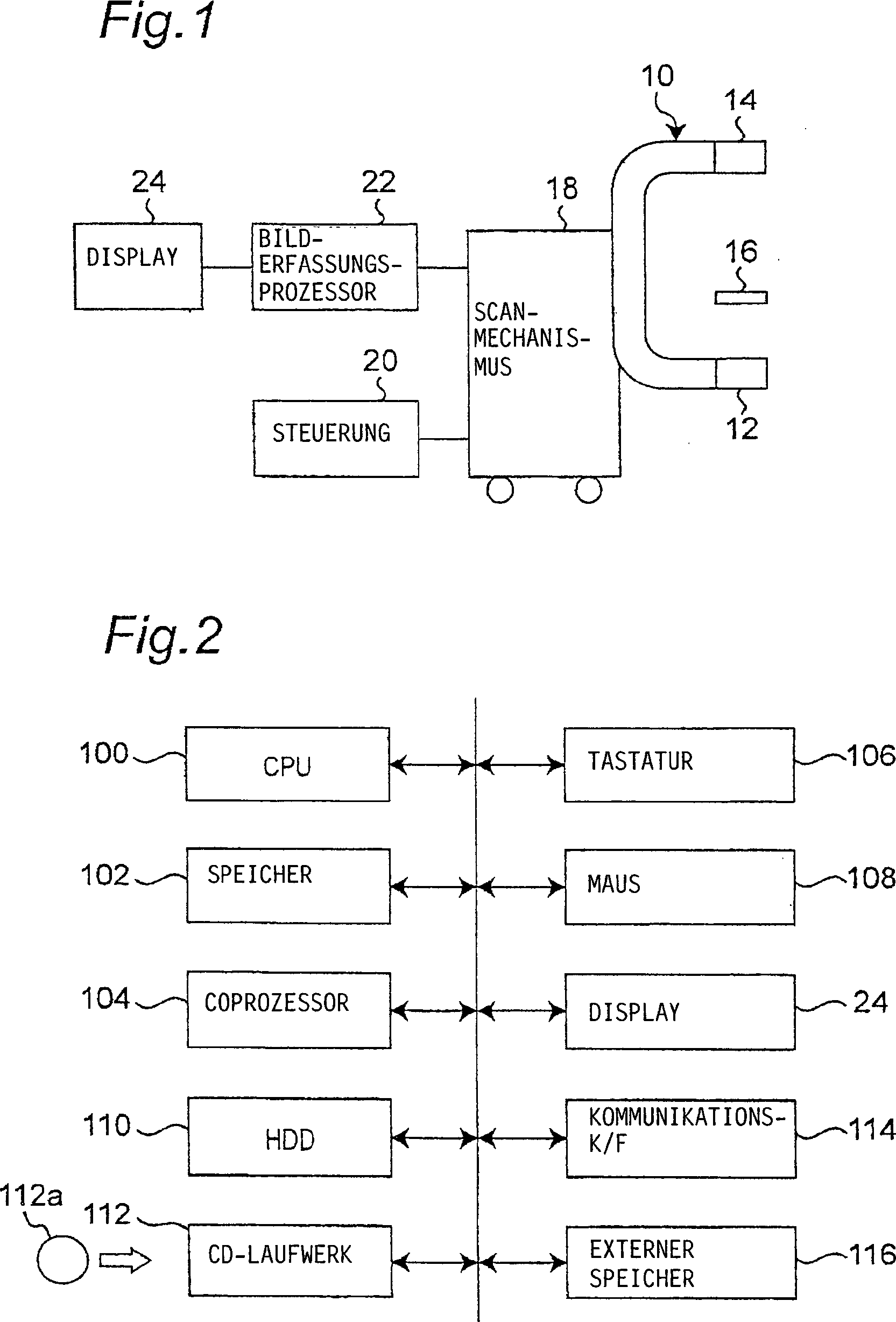
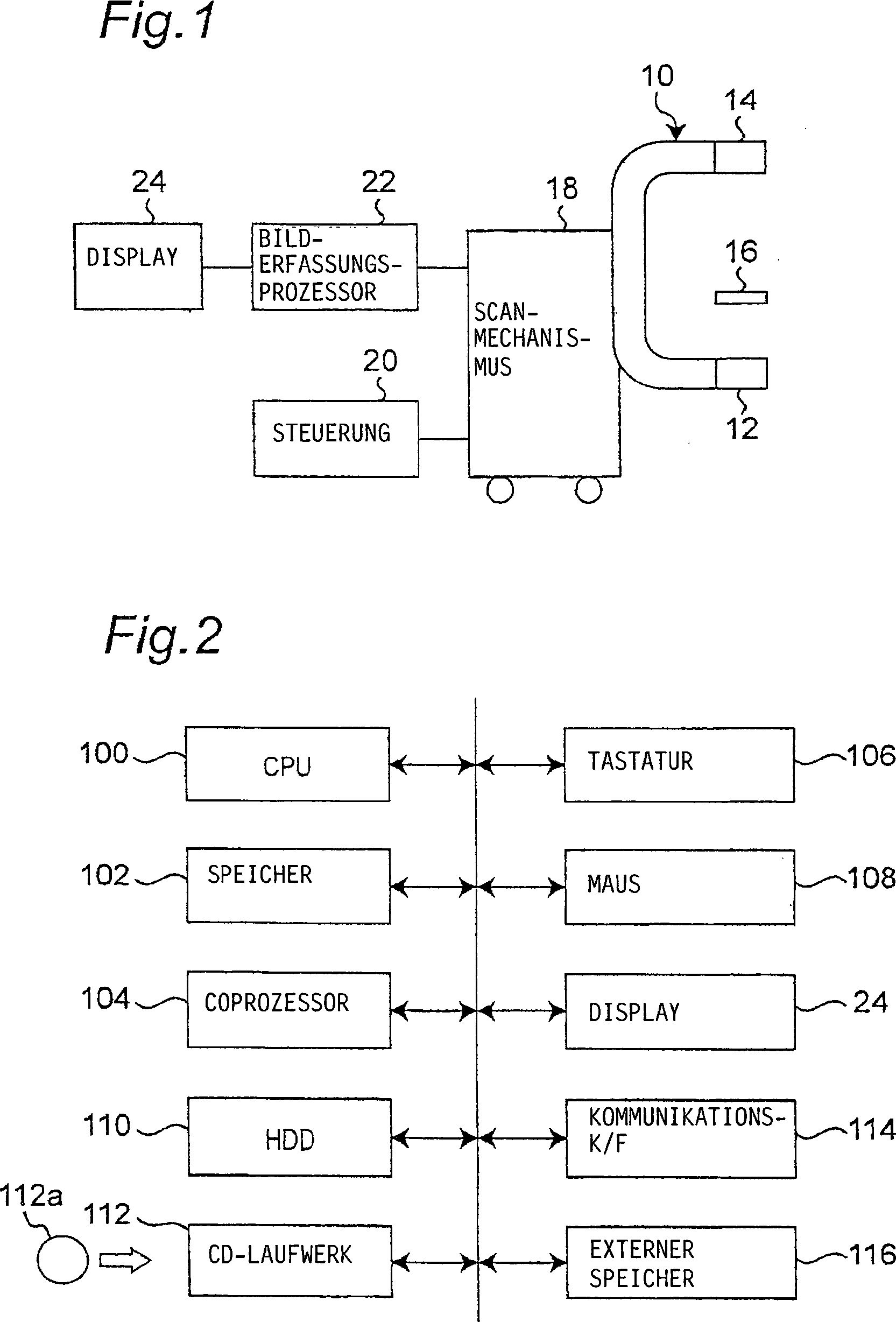
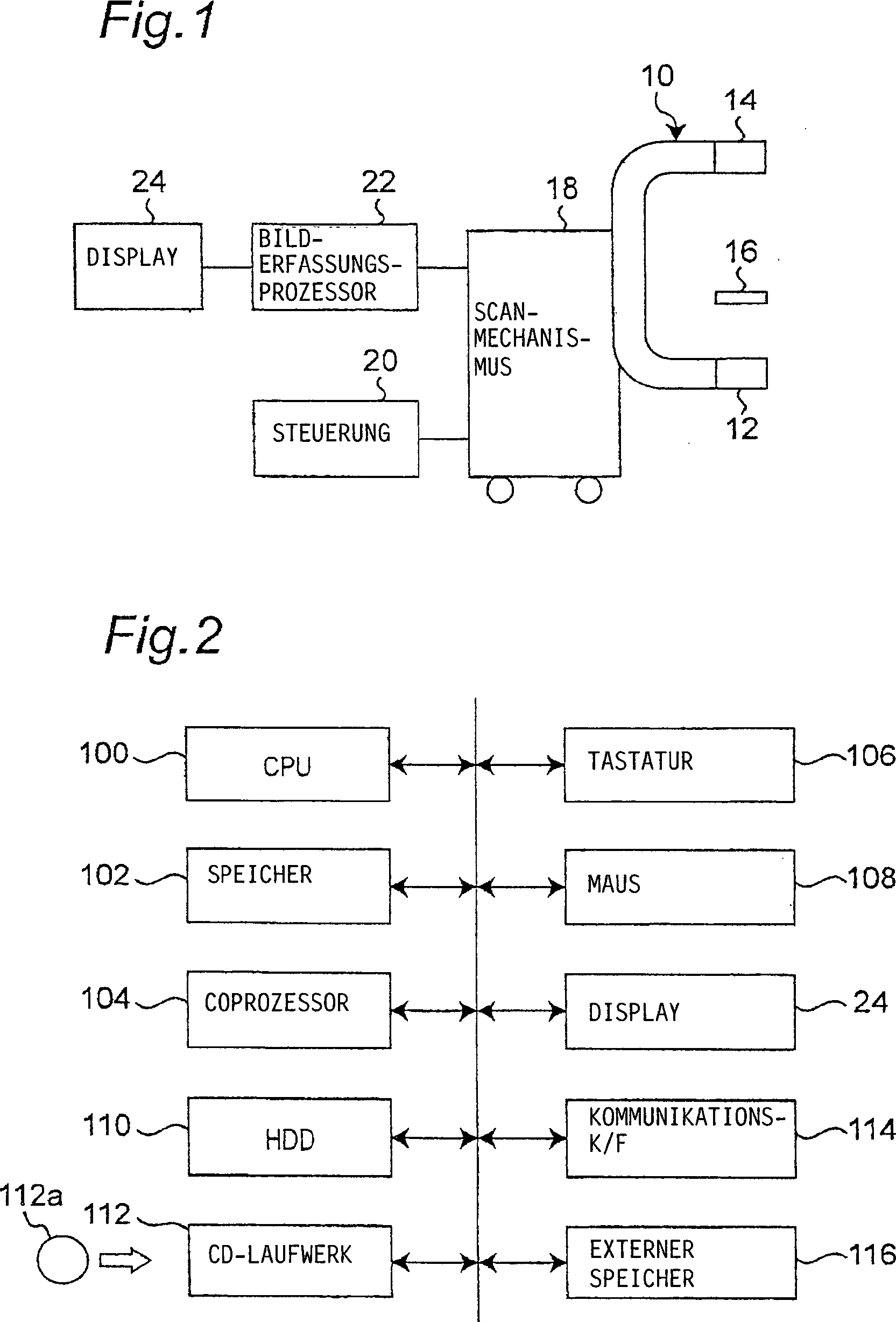
Die Erfindung betrifft ein Verfahren zur Korrektur eines CT-Röntgenbilds sowie einen zugehörigen Röntgen-CT-Scanner und einen computerlesbaren Speicherträger. Ein typischer Röntgen-CT(Computertomografie)-Scanner verfügt über einen Galgen bzw. einen Rahmen mit einer Röntgenstrahlungsquelle und einem Röntgenstrahlendetektor, die beide an einer rotierenden Komponente des Rahmens einander gegenüberstehend montiert sind. Eine zu untersuchende Person, die vertikal und horizontal verstellbar auf einem Bett liegt, wird zwischen der Röntgenstrahlenquelle und dem Röntgenstrahlendetektor positioniert. Während der Rahmen um die Person herum gedreht wird, wird durch die sich entlang einer Kreisbahn bewegende Röntgenstrahlenquelle ein kegelförmiges Röntgenstrahlenbündel erzeugt, um die Person zu bestrahlen, und diese durchstrahlende Röntgenstrahlen werden vom Röntgenstrahlendetektor empfangen. Im Fall eines Wendel-CT-Scanners wird mit der Röntgenbilderzeugung fortgefahren, während die Person auf dem Bett weiter bewegt wird. Die Erfassungsdaten werden einem Rechenvorgang unterzogen, um ein Tomografie-Röntgenbild der Person zu rekonstruieren, das dann auf einem Display angezeigt wird. Der Galgen bzw. Rahmen eines Röntgen-CT-Scanners kann über einen die Röntgenstrahlenquelle und den Röntgenstrahlendetektor haltenden C-Arm verfügen (siehe z. B. Ein Röntgen-CT-Scanner zu Dentalzwecken bestrahlt eine zu untersuchende Person lokal, um ein Tomografie-Röntgenbild zu einem örtlichen Gebiet oder Teil der Person zu erzeugen (siehe z. B. Bei den oben genannten Röntgen-CT-Scannern sind der Galgen und das Bett (oder der Stuhl) am Träger befestigt. Obwohl derartige große, an einem Träger befestigte Röntgen-CT-Scanner allgemein verwendet werden, wird für medizinische Zwecke und dergleichen ein tragbarer Röntgen-CT-Scanner benötigt. Es ist zu erwarten, dass ein tragbarer Röntgen-CT-Scanner einfacher und auf verschiedene andere Arten einsetzbar ist. Bei einem Röntgen-CT-Scanner zur Bilderzeugung für ein örtliches Gebiet besteht die Möglichkeit, denselben kompakt und tragbar auszubilden. Ein tragbarer Röntgen-CT-Scanner kann z. B. unter Verwendung eines C-Arm-Galgens mit horizontaler Rotationsachse realisiert werden. Jedoch sind viele Probleme zu lösen, um tatsächlich einen tragbaren Röntgen-CT-Scanner zu verwenden. Eines der Probleme ist die Korrektur eines Tomografiebilds aufgrund von Positionsverschiebungen der Röntgenstrahlenquelle und des Röntgenstrahlendetektors. Ein Bild muss durch Korrigieren der Bilddaten in Bezug auf die Positionsverschiebungen rekonstruiert werden. Für Röntgen-CT-Scanner wurden verschiedene Korrekturtechniken hinsichtlich einer Positionsverschiebung vorgeschlagen. Zum Beispiel wird beim in Ein in Ein in Die „Development and Evaluation of a MicroCT System for Small Animal Imaging” von Song, X. et al. (Nuclear Science Symposium Conference Record, Vol. 3, 2001, 1600–1604) befasst sich mit einem Röntgen-MicroCT-System mit hoher räumlicher Auflösung zur Erfassung von kleinen Tieren. Das System soll auch zum Einsatz für die Auswertung und Entwicklung von Rekonstruktionsalgorithmen dreidimensionaler Computertomographie dienen. Die Die Der Erfindung liegt die Aufgabe zugrunde, einen Rötgen-CT-Scanner unter Verwendung eines um eine nicht vertikale Achse drehbaren Rotationsarms, der eine Röntgenstrahlenquelle und einen Röntgenstrahlendetektor hält, zu schaffen, der Röntgenbilddaten mit hoher Genauigkeit erfassen kann. Ferner liegt ihr die Aufgabe zugrunde, ein Verfahren zum Korrigieren von CT-Röntgenbildern sowie einen computerlesbaren Datenträger, der ein Programm zum Ausführen eines derartigen Verfahrens speichert, zu schaffen. Diese Aufgaben sind durch das Verfahren gemäß dem beigefügten Anspruch 1, den Datenträger gemäß dem Anspruch 4 und den Röntgen-CT-Scanner gemäß dem Anspruch 5 gelöst. Ein Vorteil der Erfindung besteht darin, dass ein Röntgenbild mit einem Röntgen-CT-Scanner mit einem um eine nicht vertikale Achse gedrehten Rotationsarm korrekt erfasst werden kann. Ein anderer Vorteil der Erfindung besteht darin, dass Bilddaten einfach und schnell berechnet werden können. Diese und andere Aufgaben und Merkmale der Erfindung werden aus der folgenden detaillierten Beschreibung in Verbindung mit den bevorzugten Ausführungsformen der Erfindung unter Bezugnahme auf die beigefügten Zeichnungen deutlich werden. In den Zeichnungen kennzeichnen gleiche Bezugszeichen gleiche oder ähnliche Teile in allen Ansichten. Dabei zeigt die Ein Röntgenbild wird dadurch erhalten, dass nur ein örtlicher Bereich, von dem ein Bild zu erzeugen ist, oder ein zu untersuchender Teil der Person mit dem durch die Röntgenstrahlenquelle 12 erzeugten kegelförmigen Röntgenstrahlenbündel bestrahlt wird, während der Rotationsarm 10 mit der Röntgenstrahlenquelle 12 und dem Röntgenstrahlendetektor 14, die einander gegenüberstehen, um die Person gedreht wird. Die Rotationssteuerung des Rotationsarms 10 ist ähnlich wie bei einem bekannten Scanner, und sie wird hier nicht detailliert erläutert. Die Erfassungssignale vom zweidimensionalen Röntgenstrahlendetektor 14 werden über den Scanmechanismus 18 an einen Bilderfassungsprozessor 22 geliefert und dort in einem Speicher abgespeichert. Auf Grundlage der erfassten Daten wird ein Röntgenbild berechnet, und es werden dreidimensionale Röntgenstrahlen-Absorptionskoeffizienten im örtlichen Bereich berechnet, um ein Bild zu rekonstruieren. Das rekonstruierte Bild wird auf einem Display 24 angezeigt. Beim in der Die Im Bilderfassungsprozessor 22 ist ein Datenträger zum Speichern der Programme, z. B. die Festplatte, jedoch kann es sich um eine Diskette oder verschiedene Typen optischer Platten handeln, die in einem zugehörigen Laufwerk betrieben werden, wie einem Diskettenlaufwerk oder einem Laufwerk für optische Platten. Beim oben genannten Röntgen-CT-Scanner zeigte es sich durch Versuche, dass der Rotationsarm 10, wenn er um eine horizontale Rotationsachse (z) gedreht wird, eine Durchbiegebewegung nach unten ausführt, wie es schematisch in der Wenn die Rotationsachse vertikal verläuft, tritt keine Durchbiegebewegung nach unten auf. Demgemäß wird der Rotationsarm, selbst wenn er sich durchbiegt und verformt, während der Drehung um einen konstanten Wert in der vertikalen Richtung verformt, so dass kein Problem existiert. Dagegen ist es bei der oben genannten horizontalen CT erforderlich, das Ursprungsbild hinsichtlich der Durchbiegebewegung nach unten in der Richtung der Rotationsachse (z-Richtung) zu korrigieren. Vor der Korrektur des Bilds für die oben genannte Abweichung in der z-Achse ist es bevorzugt, dass Auslenkungen in den beiden anderen Richtungen orthogonal zur Rotationsachse (z-Achse) unter Verwendung des bekannten Prozesses korrigiert werden, wie er z. B. in Als Nächstes wird die Korrektur der Abweichung in der z-Richtung erläutert. Die Schwankung aufgrund der sogenannten ”Durchbiegung nach unten” wird durch Bilderzeugung für ein in der Die Im Idealzustand ist die zentrale Position der Kugel 32 relativ zum Rotationszentrum O durch die nachfolgend angegebene Gleichung (1) repräsentiert: wobei r der Radius (Abstand) des Orts der Kugel 32 in einer Richtung vertikal zur z-Achse (Rotationsachse) ist und Θ der Winkel der Kugel um die z-Achse ist. Zum Beispiel wird r als Radius einer Abweichung in einer Richtung vertikal zur z-Achse (Rotationsachse) erhalten. Die Die Differenz zwischen ZP (Gleichung (2)) und der tatsächlichen Position der Kugel 32 wird als Korrekturwert in der Richtung z verwendet. Wenn das Bild der Kugel 32 im Korrekturphantom 30 in der Richtung y betrachtet wird, wird ein Ort P erhalten, wie er in der Es wird davon ausgegangen, dass in der xz-Ebene zwei Begrenzungen hinsichtlich der Abweichung der Kugel 32 in der Richtung x existieren. Der Abstand r (oder der Radius r) der Kugel 32 von der z-Achse, der auch die Bedeutung der Abweichungsweite r der Kugel 32 hat, wird auf Grundlage einer Weite 2R der Abweichung im zweidimensionalen Bild erhalten, wodurch das Ausmaß der Bewegung in der Richtung x für den Ort P der Kugel 32, wie in der Da z. B. der Abstand r dem Radius r eines in der Beim oben genannten Beispiel wird, wenn der Rotationsarm 10 eine vollständige Umdrehung ausführt, der Maximalwert der Weite 2R der Abweichung gemessen, und der Abstand r wird auf Grundlage der Hälfte dieses Werts bestimmt. Jedoch muss der Rotationsarm 10 nicht notwendigerweise um 360° gedreht werden, sondern er kann um mehr oder weniger als 360° gedreht werden. Wenn z. B. der Rotationsarm 10 um genau 180° ausgehend von einer der zwei Grenzen der Abweichung verdreht wird, wird der Abstand r auf Grundlage der Orte, ohne dass die Weite 2R der Abweichung gemessen wird, zur Hälfte der Weite 2R bestimmt. Ferner kann die mittlere Position der Kugel 32 auf der z-Achse im zweidimensionalen Bild allgemein als Mittelwert von z-Koordinaten an den zwei Grenzen in der Richtung x bestimmt werden (siehe die Alternativ kann R unter Verwendung des Verfahrens der Summe der kleinsten Fehlerquadrate erhalten werden. Der Winkel θ der Position der Kugel 32 kann berechnet werden, wenn die Rahmennummern der Bilder sowohl am linken als auch am rechten Ende aufgefunden sind. Der rechte Punkt wird auf 0° gesetzt, und der linke Punkt wird auf 180° gesetzt. Wenn über 360° (oder 2π) N Bilder erhalten werden, unterscheiden sich die Rahmen um den Winkel 2π/N. Demgemäß wird der Winkel für den Rahmen Null wie folgt erhalten. Es ist zu berücksichtigen, dass die durch die Beziehungen (6) und (7) berechneten Werte um 2π voneinander verschieden sein können. Der Winkel des Rahmens m wird wie folgt ausgedrückt: Wie oben erläutert, wird die Position der Kugel auf Grundlage der zweidimensionalen Bildaufnahmeebene bestimmt. Als Nächstes wird die Differenz zwischen ZP und der aktuellen Bildaufnahmeposition für die Kugel 32 bestimmt und auf einen Korrekturwert in der Richtung z eingestellt. Dann wird für den Rotationswinkel und den Korrekturwert für die Abweichung in der Richtung z eine Korrekturtabelle erstellt. Wenn Bilddaten erfasst werden, wird die Position unter Verwendung der Korrekturtabelle korrigiert. Die Als Nächstes wird die Abweichungsweite 2R des erhaltenen Orts P (Radius r1, r2) für jede der Kugeln 32 in seitlicher Richtung (Richtungen vertikal zur z-Achse) im zweidimensionalen Bild erhalten (Schritt S14). (Die Indizes 1 und 2 repräsentieren die eine und die andere der zwei Kugeln.) Als Nächstes wird der Mittelwert Zb1, Zb2 der Abweichung des Orts in der vertikalen Richtung (Richtung Z) im zweidimensionalten Bild erhalten (Schritt S16). Als Nächstes wird der ideale Ort der Kugel 32 unter Verwendung der unten angegebenen Gleichung (2) berechnet: Vorstehend ist ein Röntgen-CT-Scanner mit einem Rotationsarm mit einer horizontalen Rotationsachse erläutert. Jedoch kann eine Positionsabweichung in der vertikalen Richtung in ähnlicher Weise auch bei einem Röntgen-CT-Scanner, wie er in der Die Verfahren zum Korrigieren eines Röntgenbilds in einem Röntgen-CT-Scanner mit einem Rotationsarm (10) und einem Scanmechanismus (18), wobei der Rotationsarm (10) über eine ein kegelförmiges Röntgenstrahlenbündel erzeugende Röntgenstrahlenquelle (12) und einen dieser gegenüberstehenden zweidimensionalen Röntgenstrahlendetektor (14) verfügt, wobei der Scanmechanismus (18) den Rotationsarm (10) auf einer nicht vertikalen Rotationsachse (z) hält und verdreht und wobei zweidimensionale Röntgenbilddaten vom Röntgenstrahlendetektor (14) erfasst und verarbeitet werden, während der Scanmechanismus (18) den Rotationsarm (10) verdreht, mit den folgenden Schritten: – Platzieren eines Korrekturphantoms (30) zwischen der Röntgenstrahlenquelle (12) und dem zweidimensionalen Röntgenstrahlendetektor (14), wobei das Korrekturphantom (30), in das ein Röntgenstrahlen absorbierendes Objekt (32) eingebettet ist, aus einem Röntgenstrahlen durchlassenden Material besteht, und wobei das Objekt (32) in dem Korrekturphantom (30) um die Rotationsachse (z) herum oder im Wesentlichen auf dieser gelegen ist; – Erfassen der zweidimensionalen Bilddaten des Objekts (32) durch Erzeugen von Röntgenstrahlen durch die Röntgenstrahlenquelle (12) sowie Empfangen der das Objekt (32) durchstrahlenden Röntgenstrahlen durch den Röntgenstrahlendetektor (14), während der Rotationsarm (10) gedreht wird, wobei sich die Bilddaten in der Richtung der Rotationsachse (z) des Rotationsarms (10) und in einer anderen Richtung orthogonal zur Rotationsachse (z) erstrecken; – Bestimmen des Orts (P) des Objekts (32) in den zweidimensionalen Bilddaten; – Abschätzen eines idealen Orts Z des Objekts (32) in der Richtung der Rotationsachse (z) auf Grundlage des bestimmten Orts (P) in den zweidimensionalen Bilddaten; und – Bestimmen der Differenz zwischen dem abgeschätzten idealen Ort ZP und der entsprechenden tatsächlichen Position des in den zweidimensionalen Bilddaten bestimmten Orts (P) in der Richtung der Rotationsachse (z), und ... Verfahren zum Korrigieren eines Röntgenbilds in einem Röntgen-CT-Scanner mit einem Rotationsarm (10) und einem Scanmechanismus (18), wobei der Rotationsarm (10) über eine ein kegelförmiges Röntgenstrahlenbündel erzeugende Röntgenstrahlenquelle (12) und einen dieser gegenüberstehenden zweidimensionalen Röntgenstrahlendetektor (14) verfügt, wobei der Scanmechanismus (18) den Rotationsarm (10) auf einer nicht vertikalen Rotationsachse (z) hält und verdreht und wobei zweidimensionale Röntgenbilddaten vom Röntgenstrahlendetektor (14) erfasst und verarbeitet werden, während der Scanmechanismus (18) den Rotationsarm (10) verdreht, mit den folgenden Schritten: Verfahren nach Anspruch 1, gekennzeichnet durch den Schritt des Erzeugens einer Tabelle zum Korrelieren des Rotationswinkels θ des Rotationsarms (10) mit der Differenz. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass eine horizontal verlaufende Rotationsachse (z) verwendet wird. Computerlesbarer Speicherträger für einen Röntgen-CT-Scanner mit einem Rotationsarm (10) und einem Scanmechanismus (18), wobei der Rotationsarm (10) über eine ein kegelförmiges Röntgenstrahlenbündel erzeugende Röntgenstrahlenquelle (12) und einen dieser gegenüberstehenden zweidimensionalen Röntgenstrahlendetektor (14) verfügt, wobei der Scanmechanismus (18) den Rotationsarm (10) auf einer nicht vertikalen Rotationsachse (z) hält und verdreht und wobei zweidimensionale Röntgenbilddaten vom Röntgenstrahlendetektor (14) erfasst und verarbeitet werden, während der Scanmechanismus (18) den Rotationsarm (10) verdreht, wobei dieser Speicherträger ein Programm umfasst, dass dazu eingerichtet ist, bei Ablauf des Programms die Verfahrensschritte des Verfahrens nach einem der Ansprüche 1 bis 3 auszuführen. Röntgen-CT-Scanner mit:
r = 2R·(1/2)·
= –(Anzahl der rechten Punkte)·2π/N (6)
= –(Anzahl der linken Punkte)·2π/N + π (7)
= (Winkel des Rahmens Null) + m·2π/N (8)
– Platzieren eines Korrekturphantoms (30) zwischen der Röntgenstrahlenquelle (12) und dem zweidimensionalen Röntgenstrahlendetektor (14), wobei das Korrekturphantom (30), in das ein Röntgenstrahlen absorbierendes Objekt (32) eingebettet ist, aus einem Röntgenstrahlen durchlassenden Material besteht, und wobei das Objekt (32) in dem Korrekturphantom (30) um die Rotationsachse (z) herum oder im Wesentlichen auf dieser gelegen ist;
– Erfassen der zweidimensionalen Bilddaten des Objekts (32) durch Erzeugen von Röntgenstrahlen durch die Röntgenstrahlenquelle (12) sowie Empfangen der das Objekt (32) durchstrahlenden Röntgenstrahlen durch den Röntgenstrahlendetektor (14), während der Rotationsarm (10) gedreht wird, wobei sich die Bilddaten in der Richtung der Rotationsachse (z) des Rotationsarms (10) und in einer anderen Richtung orthogonal zur Rotationsachse (z) erstrecken;
– Bestimmen des Orts (P) des Objekts (32) in den zweidimensionalen Bilddaten;
– Abschätzen eines idealen Orts Z des Objekts (32) in der Richtung der Rotationsachse (z) auf Grundlage des bestimmten Orts (P) in den zweidimensionalen Bilddaten; und
– Bestimmen der Differenz zwischen dem abgeschätzten idealen Ort ZP und der entsprechenden tatsächlichen Position des in den zweidimensionalen Bilddaten bestimmten Orts (P) in der Richtung der Rotationsachse (z), und
– Rekonstruieren eines Röntgen-CT-Bildes des Objekts (32) basierend auf den zweidimensionalen Bilddaten des Objekts (32), wobei eine Position des Röntgen-CT-Bildes in Richtung der Rotationsachse (z) basierend auf der bestimmten Differenz korrigiert wird; wobei
der Schritt des Abschätzens des idealen Orts ZP die folgenden Unterschritte beinhaltet:
– Bestimmen einer Weite (2R) einer Abweichung in einer Richtung orthogonal zur Rotationsachse (z) für den bestimmten Ort (P) des Objekts (32) in einer Überlagerung der zweidimensionalen Bilddaten;
– Bestimmen des Abstands r des Objekts (32) von der Rotationsachse (z) auf Grundlage der bestimmten Weite (2R) der Abweichung;
– Bestimmen der mittleren Position (Zb1, Zb2) in der Richtung der Rotationsachse (z) des bestimmten Orts (P) in der Überlagerung der zweidimensionalen Bilddaten;
– Setzen der bestimmten mittleren Position (Zb1, Zb2) als Wert ZB;
– Bestimmen des Rotationswinkels θ des Rotationsarms (10) auf Grundlage des in der Überlagerung der zweidimensionalen Bilddaten bestimmten Orts (P); und
– Berechnen des idealen Orts ZP in Richtung der Rotationsachse (z) gemäß der folgenden Beziehung:
– einem Rotationsarm (10) mit einer ein kegelförmiges Röntgenstrahlenbündel erzeugenden Röntgenstrahlenquelle (12) und einem dieser gegenüberstehenden zweidimensionalen Röntgenstrahlendetektor (14);
– einem Scanmechanismus (18) zum Halten und Drehen des Rotationsarms (10), wobei der Rotationsarm (10) über eine nicht vertikale Rotationsachse (z) verfügt;
– einer Speichervorrichtung (102) zum Speichern einer Korrekturtabelle für einen Rotationswinkel θ des Rotationsarms (10) und eine Positionsabweichung in der Richtung der Rotationsachse (z), wobei die Korrekturtabelle aufgrund von Bilddaten eines Objekts (32) festgelegt wurde, das zwischen der Röntgenstrahlenquelle (12) und dem Röntgenstrahlendetektor (14) um die Rotationsachse (z) herum oder im Wesentlichen auf dieser gelegen ist;
– einer Erfassungsvorrichtung (22) zum Erfassen von Bilddaten vom Röntgenstrahlendetektor (14), während der Rotationsarm (10) durch den Scanmechanismus (18) gedreht wird, und zum Korrigieren der Position in der Richtung der Rotationsachse (z) unter Verwendung der in der Speichervorrichtung (102) gespeicherten Korrekturtabelle; und
– einem Display (24), das ein Bild anzeigt, das aus den von der Bilderfassungsvorrichtung erfassten Bilddaten rekonstruiert wurde; wobei
der Röntgen-CT-Scanner dazu eingerichtet ist, das Verfahren gemäß einem der Ansprüche 1 bis 3 auszuführen.
CPC - классификация
AA6A61A61BA61B6A61B6/A61B6/0A61B6/02A61B6/027A61B6/03A61B6/032A61B6/4A61B6/40A61B6/408A61B6/4085A61B6/44A61B6/444A61B6/4441A61B6/46A61B6/463A61B6/5A61B6/58A61B6/583IPC - классификация
AA6A61A61BA61B6A61B6/A61B6/0A61B6/00A61B6/03GG0G01G01NG01N2G01N23G01N23/G01N23/0G01N23/06Цитирование НПИ
SILVER, M.D. [et al]: Determination and correction of the wobble of a C-arm gantry. In: Medical Imaging 2000: Image Processing. Proceedings of SPIE Vol. 3979 (2000). 1459 – 1468.Song, X. [u.a.]: Development and Evaluation of a MicroCT System for Small Animal Imaging. Nuclear Science Symposium Conference Record, Vol. 3 (2001), 1600-1604