EFFICIENT DATA COORDINATE MAP GENERATION METHOD FOR CAMERA IMAGE CORRECTION AND RECTIFICATION
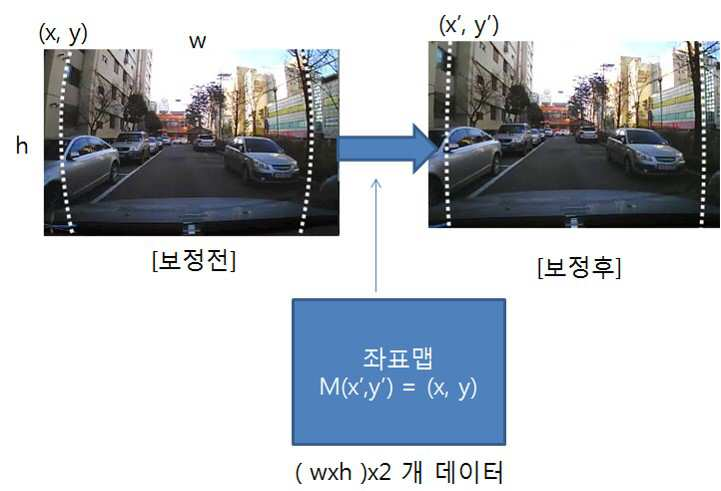
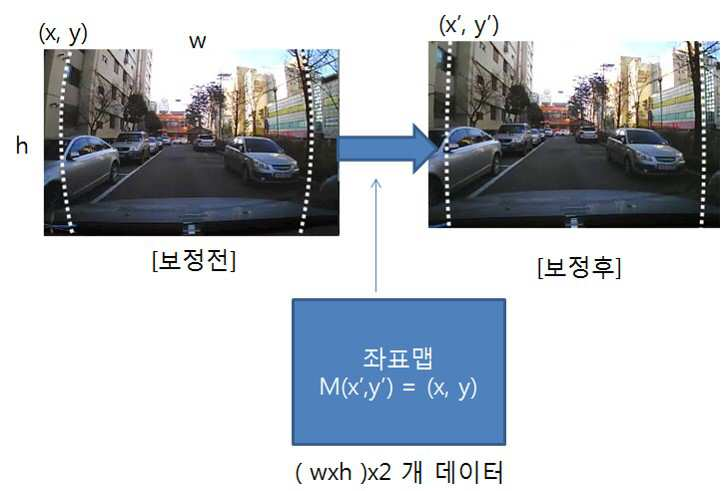
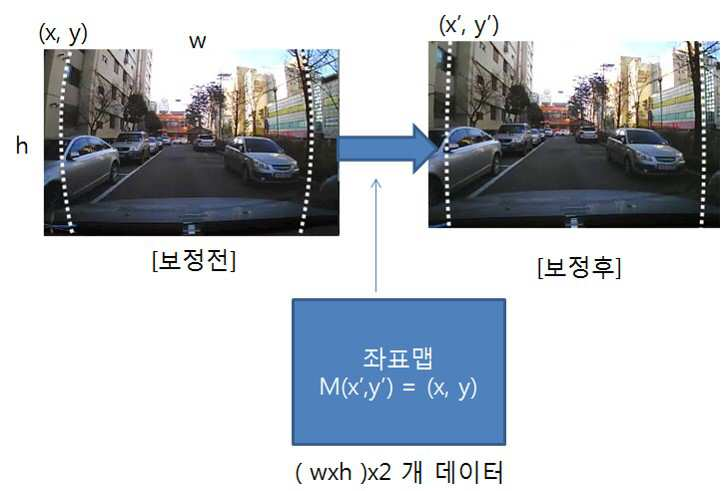
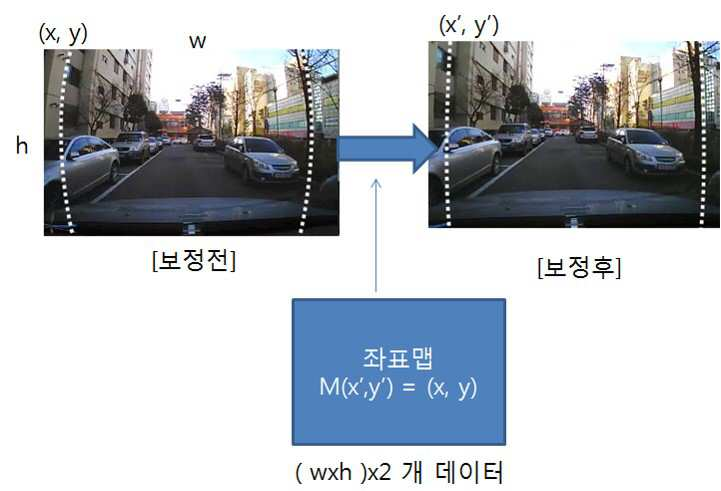
The present invention refers to relates to Image processing techniques, and rearranging the new Image pixel value of input Image is provided is connected to the reference coordinates that produces the method are disclosed. In order to transform the input Image derived Image coordinate map is generated with reference to the absolute coordinate. The, coordinate map size cursor many memory is required which, along door number are further grown large Image size. In particular, such as embedded system or SoC (System on a Chip) semiconductor counting operation, coordinate map according to increasing the size of a memory resource and total system load, increasing the utility rate of a data bus, even entire speed adverse effects on other. The memory bus load reduction forms comprises a transceiver, coordinate map size reducing malleable fitting of measures are requested. In order to solve the present invention refers to said door number point such as battery is provided, the purpose of the invention is, memory bus load reduction forms comprises a transceiver, a method that produces an absolute coordinate relative coordinates is not coordinate number under public affairs substrate. In addition, the purpose of the invention is, not absolute coordinate relative coordinate coordinate map generated Image converting a number public box derived is connected to an input processing method can be recycled. In the embodiment according to one of the present invention for achieving said purpose, the Image processing method, generating coordinate map; and resulting receives the coordinates, the steps of converting the Image number 1 number 2 Image; and, said coordinate map is, number 1 and number 2 Image coordinates represented by Image coordinates relative relationship. And, said coordinate map is, deviation of said number 1 Image coordinates and said number 2 Image coordinates can be represented. In addition, in said coordinate map, part number 1 and number 2 Image coordinates relative relation which appears as the Image coordinates, the remainder number 1 Image coordinates can be represented. And, the remainder said, x coordinate is smaller than m, n can be less than coordinates y coordinates. In addition, said number 1 Image is, the original Image and, said number 2 Image is, be a corrected Image. And, said Image can be corrected, be a rack mote blood k [syen Image. On the other hand, in the embodiment according to other of the present invention, an Image processing system includes, coordinate map generating unit; and resulting coordinate receives the, Image conversion unit for converting the Image number 1 number 2; and, said coordinate map is, number 1 and number 2 Image coordinates represented by Image coordinates relative relationship. And, said coordinate map is, deviation of said number 1 Image coordinates and said number 2 Image coordinates can be represented. As the device, of the present invention in the embodiment according to, Image of pixels and rearranging the position coordinate map to use when absolute coordinate relative coordinate is not implemented, the required storage area and coordinate maps, map coordinates for reducing switching operations is equal to or higher. Figure 1 shows a single camera lens distortion correction process also indicating surface, Figure 2 shows a rack mote blood k [syen indicating the process also a stereo camera, Figure 3 shows a of the present invention also one in the embodiment according to non-linear function block, and, Figure 4 shows a method of the present invention also other Image processing in the embodiment according to which flow to the elucidation of the number ball are disclosed. The present invention hereinafter with reference to the drawing in more detailed as follows. 1. Generating map coordinates using relative coordinate Figure 1 shows a single camera lens distortion correction process and also indicating drawing, Figure 2 indicating the stereo camera rack mote blood k [syen process are disclosed. The two resins are all procedures, changing a position of a pixel of existing Image P (x, y) a new Image P '(x', y ') are made of substrate. The new pixel coordinate (x ', y') used herein designated coordinates with the coordinates of pixels existing map M (x ', y') are disclosed. E.g., (x ', y') position coordinate map value M (x ', y')=(256, 326) if, novel Image (x ', y') pixel value P (x ', y') in existing Image (256, 326) in pixel value P (256, 326) the auction are disclosed. Under this relationship as can exhibit. P=P (x ', y') (M (x ', y')) M (x ', y') with at least one of the coordinates etc. existing elements. Y coordinates (x ', y') is M x coordinates must be removed from the, M (x ', y') data size (W * H * 2) twice Image size is under or over. In addition, when it is [ley five camera rack mote blood k [syen, data amount for the number camera 1,750,000. Here M (x ', y') representing existing Image coordinate (x, y) is changed according, same range (x, y) are as easily. 0 ≤ M ≤ W-a 1 (x ') 0 ≤ M ≤ H-a 1 (y ') Coordinate map the absolute coordinates in using existing Image, coordinate map data from the disadvantage that the pin is size. E.g. HD class original video information received from inputted data is required to be coated 11bit 1280 coordinates to the representation. When compensating a while or rack mote blood k [syen, done by a coordinate matching coordinates of novel Image coordinates of not greater variation between existing Image 2000. I.e., novel Image coordinates of the same existing Image coordinates of an already existing Image peripheral coordinates are disclosed. The in of the present invention in the embodiment, is not absolute coordinate relative coordinates coordinate map creating decodes mufflers in number. Coordinate map relative coordinates for a user interface, a user interface than absolute coordinates coordinate map, data size advantageous in disclosed. Absolute coordinate: M (x ', y')=(x, y) Relative coordinate: M (x ', y')=(x-a x ', y provided y')=(Δ x, Δ y) Coordinate map upon relative coordinate represented, novel Image coordinate (x ', y') because the reference relative position information, more in terms of address can be kept. The relative coordinate represented coordinate map, M=(x ', y') if (-1, -1), novel Image P '(x', y ') value of a value of the existing Image P (x' provided 1, y ' a-1) are disclosed. In this way, relative coordinates coordinate map referred to, coordinate map size of input Image size results in exponential not increased. In addition, when compensating a or rack mote blood k [syen, done by a coordinate matching coordinates of the existing Image coordinates variation within maximum level of 5% in coordinates of a novel Image are disclosed. The coordinates 0 - 1279 until it rises HD class original video, one need but absolute coordinate 11bit include coordinates, coordinates of a difference within ± 5% when maximum relative coordinate 1280 * 0. Since 05=± 64 total 7bit needed only disclosed. The coordinate map 36% and reduce the size of the data field a, the memory bus data transfer rate of other metals and turns number increases performance of article to be coated. Further relative movement becomes small, and thereby reduce the amount of data adaptively tranfectants disclosed. 2. Video signal processing system using relative coordinate map One of the present invention in the embodiment according to Figure 3 shows a block of video processing system also are disclosed. According to an embodiment of the present invention an Image processing system includes, relative coordinate represented coordinate receives the imaging has a plurality of hierarchies. Image processing is, as well as the aforementioned compensating a or rack mote blood k [syen, filtering or other Image processing also disclosed is a. According to an embodiment of the present invention an Image processing system includes, as shown in fig. 3, coordinate map generation unit (110), coordinate map memory (120), section (130), Image memory (140), an Image converter (150), Image output (160) and bus (170) having a predetermined wavelength. Coordinate map generation unit (110) includes a coordinate map generating reference/right side using data, represented relative coordinate is a coordinate map is defined. Coordinate map memory (120) includes a coordinate map generation unit (110) coordinate map generated by the store. Section (130) receives the Image from the Image display device and an/storage medium/network, Image memory (140) and stored in a. An Image converter (150) includes a coordinate map memory (120) stored coordinate map, Image memory (140) changing a stored Image, Image memory (140) back to the store. Image output unit (160) is Image memory (140) outputs stored in the transformed Image. Bus (170) includes a coordinate map generation unit (110), coordinate map memory (120), section (130), Image memory (140), an Image converter (150) and video output (160) of data between a delivery path number/address/command under public affairs substrate. 3. For video signal processing method relative coordinate map Figure 4 shows a method of the present invention also other Image processing in the embodiment according to which flow to the elucidation of the number ball are disclosed. Image processing method according to an embodiment of the present invention also, relative coordinate represented coordinate receives the imaging has a plurality of hierarchies. As shown in fig. 4, right side of first coordinate map generating reference/using data, represented relative coordinate is a coordinate map is defined (S210). Next, camera/Image from the network/storage medium from a testee (S220). And, coordinate map generated in step S210, S220 Image to be entered by the converter (S230). Then, converting the outputs Image step S230 (S240). 4. Variants Hitherto, camera correction and rack mote blood k [syen data coordinate that produces an efficient method for performing coordinate mark portion receives the imaging method for example specifically preferred embodiment are described. In the embodiment above in general timing number further, transfers can be expecting the absolute coordinate relative coordinate and a coordinate map. I.e., the portion of the map coordinates which appears as the absolute coordinate, in such a way that the remainder relative coordinate represented are disclosed. Size relative coordinate relatively increase, coordinates small area (cells such as, Image size 100 * 100, upper left 5 * 5 region (0 - 5 and x coordinates, y coordinates 0 - 5 are composed in pixel region) is expressed for the absolute coordinate, represented the remainder relative coordinate or hypermetropia. In addition, or more of the present invention preferred embodiment shown in and described with respect to but, in the embodiment described above the present invention refers to the use of a specific defined correspondingly, in the claims claim the subject matter of invention made without deviating from the invention belongs in the art 155.520 thereby enabling as well as various modified embodiment, these modified embodiment of the present invention are technical idea must not be understood to or separately from the outlook will. 110: coordinate map generation unit 120: coordinate map memory 130: section 140: Image memory 150: an Image converter 160: Image output 170: bus Provided are an efficient data coordinate map for camera image correction and registration and an image processing method using the coordinate map generated thereby. The image processing method according to an embodiment of the present invention includes the steps of: generating a coordinate map; and converting a first image into a second image by using the generated coordinate map. The coordinate map is expressed by a relative relationship between the coordinate of the first image and the coordinate of the second image. Accordingly, the present invention can reduce a storage space required for the coordinate map and the use of a bus for referring to the coordinate map. COPYRIGHT KIPO 2017 Generating coordinate map; and resulting receives the coordinates, the steps of converting the Image number 1 number 2 Image; and, said coordinate map is, number 1 and number 2 Image coordinates among the Image coordinates relative relationship characterized by Image processing method. According to Claim 1, said coordinate map is, said number 1 Image coordinates and said number 2 among the Image processing method characterized deviation of Image coordinates. According to Claim 1, in said coordinate map, part number 1 and number 2 Image coordinates relative relation which appears as the Image coordinates, Image processing method characterized the remainder number 1 among the Image coordinates. According to Claim 3, said remainder, x coordinate is smaller than m, n y coordinates is less than coordinates the Image method characterized. According to Claim 2, said number 1 Image is, the original Image and, said number 2 Image, Image pickup method characterized in that the corrected data signal. According to Claim 5, said Image can be corrected, characterized in that least two rack mote blood k [syen with the standard method. Coordinate map generating unit; and resulting coordinate receives the, Image conversion unit for converting the Image number 1 number 2; and, said coordinate map is, number 1 and number 2 Image coordinates relative relationship characterized Image coordinates represented Image processing system with the. According to Claim 7, said coordinate map is, characterized in that said number 1 Image coordinates of an Image processing system with the deviation of said number 2 Image coordinates represented.