WHEEL BEARING DEVICE WITH ATTACHED SENSOR
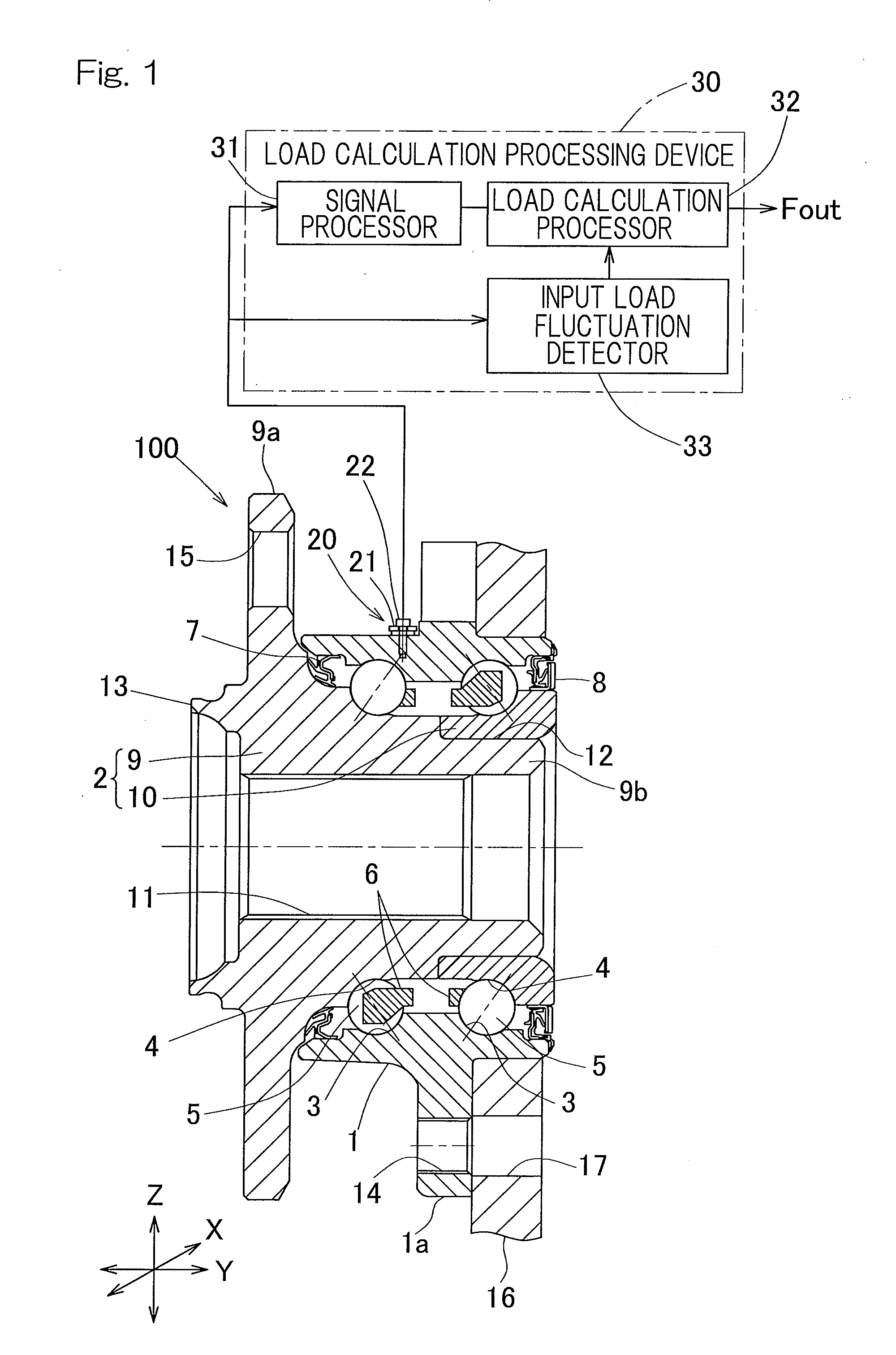
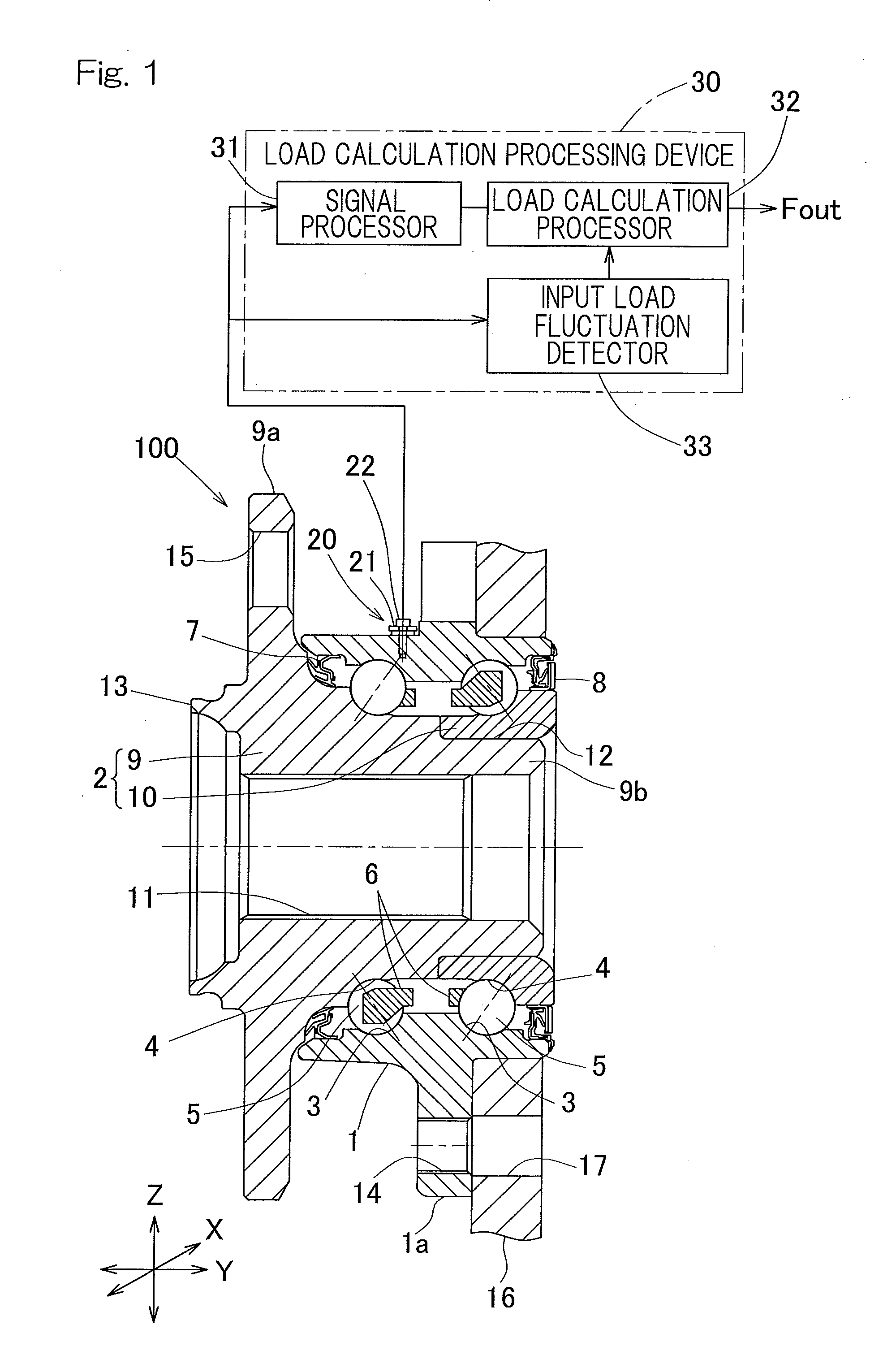
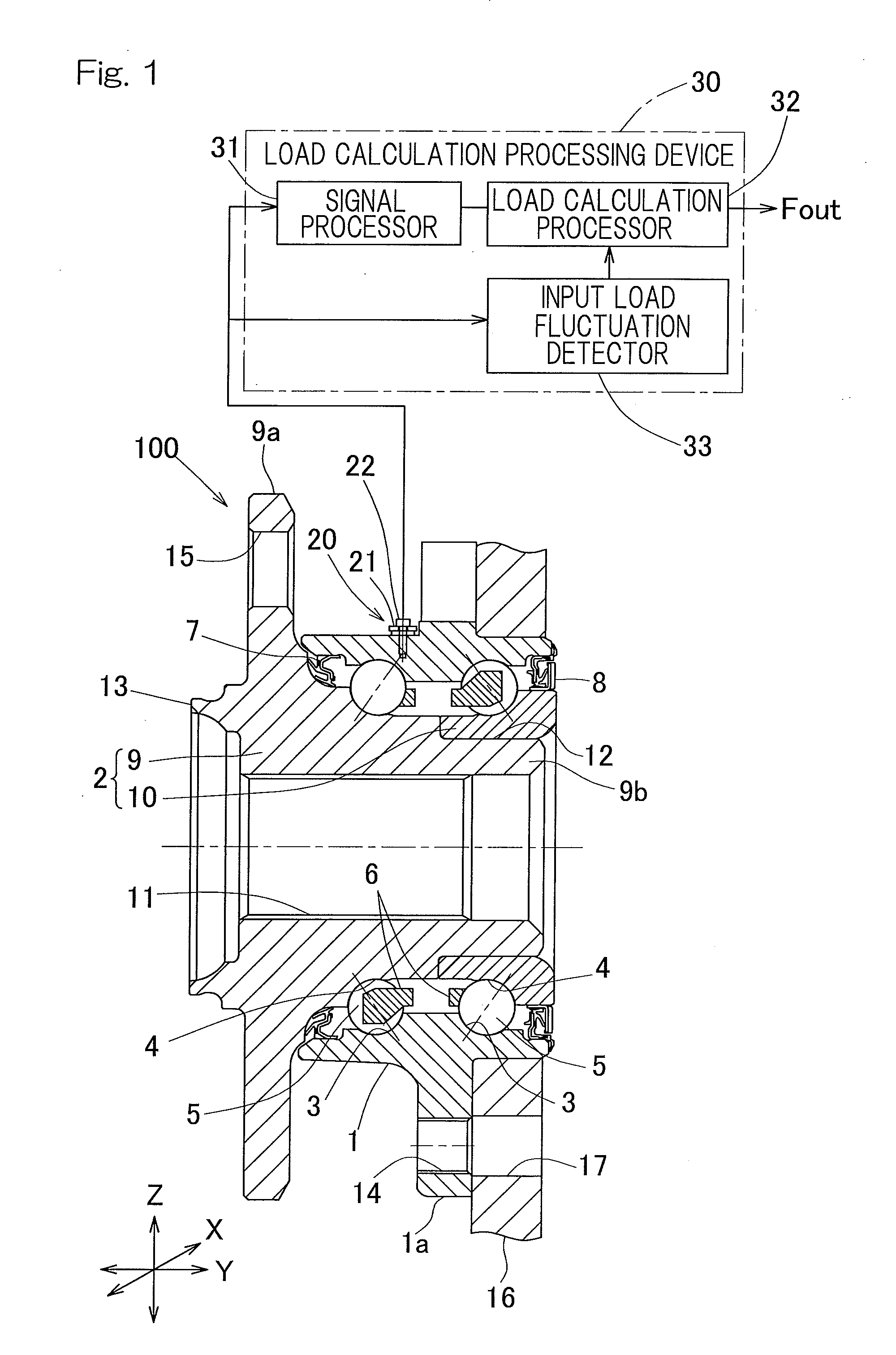
This application is a continuation application, under 35 U.S.C. §111(a), of international application No. PCT/JP2013/081695, filed Nov. 26, 2013, which claims Convention priority to Japanese patent application No. 2012-266847, filed Dec. 6, 2012, the entire disclosure of which is herein incorporated by reference as a part of this application. 1. Field of the Invention The present invention relates to a sensor-equipped wheel support bearing assembly including a load sensor for detecting a load acting on a bearing in a wheel. 2. Description of Related Art In order to determine a load acting on a wheel of an automotive vehicle, a sensor-equipped wheel support bearing assembly has been proposed, which includes a strain gauge affixed on an outer diameter surface of an outer ring of the bearing assembly to sense strain in the outer diameter surface of the outer ring, so that a load can be determined based on the detected strain (for example, Patent Document 1). However, in the technique disclosed in Patent Document 1, when determining a load acting on the wheel support bearing assembly, deformation of a stationary ring with respect to the load is inadequate and therefore the strain is also inadequate. Hence, the detection sensitivity may be unsatisfactory, and the load cannot be accurately determined. In order to solve the above problem, a sensor-equipped wheel support bearing assembly (for example, Patent Document 2) has been proposed. In the bearing assembly a sensor unit is mounted on an outer ring of a bearing. The sensor unit includes a strain generation member fixed by means of three contact fixing segments, and two strain sensors disposed on the strain generation member, and outputs strain signals. The wheel support bearing assembly performs a process of estimating and calculating an input load (a load input from a road surface to a wheel, i.e., an applied load) is performed by using, as outputs from the sensor units, a sum value of output signals from the two strain sensors (sensor pair), amplitude values thereof. Also, sensor-equipped wheel support bearing assemblies having the following configurations have been proposed (Patent Documents 3 and 4). A wheel support bearing in the sensor-equipped wheel support bearing assembly disclosed in Patent Document 3 includes: an outer member having an inner periphery formed with a plurality of rows of raceway surfaces; an inner member having an outer periphery formed with raceway surfaces facing the raceway surfaces of the outer member; and a plurality of rows of rolling elements interposed between the respective raceway surfaces in the outer member and the inner member. The bearing supports a wheel so that the wheel is rotatable relative to a vehicle body. On an outer diameter surface of a stationary member which is either the outer member or the inner member, at least one sensor unit pair including two sensor units is provided such that the two sensor units are disposed at positions having a phase difference of 180 degrees in the circumferential direction of the stationary member. Each sensor unit includes: a strain generation member having two or more contact fixing segments that are in contact with and fixed to the outer diameter surface of the stationary member; and a sensor that is mounted to the strain generation member to detect a strain occurring in the strain generation member. In this configuration, based on a difference between the output signals from the two sensor units of the sensor unit pair, a radial load estimator estimates a radial load acting radially on the wheel support bearing. Also, based on the sum of the output signals from the two sensor units of the sensor unit pair, an axial load estimator estimates an axial load acting axially on the wheel support bearing. Here, the two sensor units of the at least one sensor unit pair are disposed on upper and lower surface areas of the outer diameter surface of the stationary member, which correspond respectively to top and bottom positions relative to a tire contact surface. Based on the amplitudes of the output signals of the sensors of the sensor unit pair, an axial load direction determiner determines a direction of the axial load. If the contact fixing segments of the strain generation member of the sensor unit are disposed near the rolling surface of the stationary member of the wheel support bearing, a vibration or oscillation of approximately sinusoidal wave is induced in the sensor output signals in response to rotation of the wheel. The vibration is caused by a change in strain due to passage of the rolling elements. In the above configuration, an axial load is determined based on a difference of amplitude values (fluctuation components attributable to revolution of the rolling elements) between the output signals from the two sensor units disposed respectively at the top and bottom positions. Depending on whether the axial load is positive or negative, a load is calculated by using a load estimating parameter appropriate therefor. Thus, the load can be estimated with high sensitivity. In the sensor-equipped wheel support bearing assembly disclosed in Patent Document 4, three or more sensor units are provided on the outer diameter surface of the stationary member of the wheel support bearing disclosed in Patent Document 3, and a radial load acting radially on the wheel support bearing and an axial load acting axially on the wheel support bearing are estimated by load estimator, based on output signals from the three or more sensor units. Each of the sensor units includes: a strain generation member having two or more contact fixing segments that are in contact with and fixed to the outer diameter surface of the stationary member; and one or more sensors that are mounted to the strain generation member to detect a strain occurring in the strain generation member. Further, the output signal from each sensor unit is separated into a DC component and an AC component by output signal separating means. The load estimator estimates a load in each direction based on a linear function which is obtained by, with the amplitude values of the DC components (average value) and the AC components being variables, multiplying the variables by a correction coefficient determined for each estimated load in each direction. The sensor-equipped wheel support bearing assembly configured as described above is capable of estimating a radial load and an axial load with high sensitivity and high accuracy under any load condition. [Patent Document 1] JP Published Int'l Application No. 2003-530565 [Patent Document 2] JP Laid-open Patent Publication No. 2009-270711 [Patent Document 3] JP Laid-open Patent Publication No. 2010-43901 [Patent Document 4] JP Laid-open Patent Publication No. 2010-96565 In the sensor-equipped wheel support bearing assemblies as disclosed in Patent Documents 2 to 4 above, the load calculating process is performed on the sensor output signal that has been filtered by LPF (Low-Pass Filter) processing. Accordingly, the following problems might occur. Even if a fluctuation included in the input load is in high frequency, a high frequency component of the sensor output signal is cut off in accordance with a cutoff frequency of the LPF. This may cause a problem that the fluctuation component of the load input from the road surface does not appear in the estimated load value which is outputted. In the configuration of calculating the estimated load value by using the sensor output signal having filtered by the LPF processing, since the fluctuation component, in the high frequency band, of the sensor output signal is cut off, an error in the estimated load value outputted may occur, or an estimated load value having a characteristic different from the original characteristic may be output. In a system which uses the estimated load value outputted for vehicle control, if the estimated load value is not accurate, desired control may not be performed. The above problems are described in more detail hereinafter. In the load sensors of the sensor-equipped wheel support bearing assembly as disclosed in Patent Documents 2 to 4, as shown in However, if the fluctuation of a load input to a tire is in high frequency due to, for example, a fluctuation in the load caused by stick-slip phenomenon that is likely to occur when the tire starts to slip, or a fluctuation that occurs during traveling on a bumpy road surface, an input component in a high frequency band corresponding to the cutoff frequency of the LPF is removed from the sensor signal, and therefore, no fluctuation may appear in the output of the load calculation section. When the fluctuation component of the input load is in high frequency, if the load calculating process is performed by using the sensor signal having been filtered by the LPF processing, the estimated load value outputted may have a characteristic different from the original characteristic, or the estimation error may occur. If the load output is not accurate, the system using the load output for vehicle control cannot realize desired control. Accordingly, in the configuration of performing the load calculating process by using the sensor output signal having been filtered by the LPF processing, it is necessary to take a measure for estimating an accurate load value without depending on the frequency of fluctuation that occurs in the input load. An object of the present invention is to provide a sensor-equipped wheel support bearing assembly which is capable of estimating an accurate load value no matter which frequency the fluctuation that occurs in an input load belongs to. Hereinafter, for convenience of easy understanding, a description will be given with reference to the reference numerals in embodiments. A sensor-equipped wheel support bearing assembly according to the present invention includes: a wheel support bearing 100 for rotatably supporting a vehicle wheel relative to a vehicle body structure, the bearing including an outer member 1 having an inner periphery formed with a plurality of rows of raceway surfaces, an inner member 2 having an outer periphery formed with raceway surfaces that faces the respective raceway surfaces in the outer member, and a plurality of rows of rolling elements 5 interposed between the facing raceway surfaces of the respecting outer and inner members 1 and 2; a plurality of sensors 20 provided in the wheel support bearing 100 to detect a load acting on the wheel support bearing 100; a signal processor 31 configured to process an output signal from the plurality of sensors 20 to generate a signal vector; a load calculation processor 32 configured to calculate a load acting on the wheel, based on the signal vector; and an input load fluctuation detector 33 configured to calculate a fluctuation component of the input load which is included in the output signal from at least one of the plurality of sensors 20. The load calculation processor 32 calculates the load by applying a load calculation scheme that shifts in accordance with the fluctuation component detected by the input load fluctuation detector 33. According to this configuration, since the load calculation scheme shifts in accordance with the fluctuation component detected by the input load fluctuation detector 33, an accurate load value can be estimated without depending on the frequency of fluctuation that occurs in the input load. The load calculation processor 32 may calculate the load based on, out of the signal vector generated by the signal processor 31, a signal vector obtained without low-pass filtering the output signals from the sensors 20 with an LPF (Low Pass Filter) 35A, when the fluctuation component detected by the input load fluctuation detector 33 includes a high-frequency fluctuation component, and may calculate the load based on, out of the signal vector generated by the signal processor 31, a signal vector obtained by low-pass filtering the output signals from the sensors 20 with an LPF 35A, when the fluctuation component includes a low-frequency fluctuation component. Thus, response characteristics to the input load are improved. Whether the fluctuation component includes a high-frequency fluctuation component or a low-frequency fluctuation component is determined according to an appropriately decided criterion described later for each example. The high-frequency fluctuation component is, for example, a fluctuation component determined to mainly include frequencies higher than a given frequency value, and the low-frequency fluctuation component is, for example, a fluctuation component determined to mainly include frequencies lower than the given frequency value. When the load calculation processor 32 calculates the load based on the signal vector obtained by low-pass filtering the output signals from the sensors 20 with the LPF 35A, the signal processor 31 may specify the number of samplings of the filter processing using the LPF 35A to be performed on the output signals from the sensors 20, in accordance with the fluctuation component detected by the input load fluctuation detector 33, so that a cutoff frequency of the LPF 35A is set. In this configuration, since the cutoff frequency is set according to load fluctuations at that time, more accurate load estimation is realized. The load calculation processor 32 may calculate the load by combining a load value calculated based on, out of the signal vector generated by the signal processor 31, a signal vector obtained without low-pass filtering the output signals from the sensors 20 with the LPF 35A, and a load value calculated based on, out of the signal vector generated by the signal processor 31, a signal vector obtained by low-pass filtering the output signals from the sensors 20 with the LPF 35A, in accordance with the fluctuation component detected by the input load fluctuation detector 33. The noise component may be increased in the calculation result when only the signal vector not having been low-pass filtered is used. However, by combining this signal vector and the signal vector having been filtered, the effect of noise can be reduced. When an evaluation value E serving as criteria for determining whether the fluctuation component detected by the input load fluctuation detector 33 is in a higher-frequency which is higher than the given frequency or in a lower-frequency which is lower than the given frequency, is in a boundary area within a predetermined range of ±h (−h to +h) from a predetermined threshold C, the load calculation processor 32 may generate a calculation output Fout by combining a load value Foff calculated based on the signal vector obtained without low-pass filtering the output signals from the sensors 20 with the LPF 35A, and a load value Fon calculated based on the signal vector obtained by low-pass filtering the output signals from the sensors 20 with the LPF 35A, in accordance with proportions α and β expressed by the following equations: where x is an increment or incremental displacement of the evaluation value E from the threshold C, and α is a monotonically increasing function in which α=0 when x=−h, and α=1 when x=h. Preferably, the function f(x) is represented by the following equation: The at least one sensor 20 may include a sensor unit provided on an outer diameter surface of a stationary member which is either the outer member 1 or the inner member 2. The sensor unit 20 may include: a strain generation member 21 having three contact fixing segments 21 The input load fluctuation detector 33 may detect the fluctuation component, based on a difference Sadd_dif (Sadd_dif=Sadd−SaddA) between a sum Sadd of the output signals from the two strain detection elements, and a signal SaddA obtained by low-pass filtering the sum signal Sadd with the LPF 35A. According to this configuration, the calculation is facilitated, and the processing time is reduced. Alternatively, the input load fluctuation detector 33 may calculate the evaluation value E based on past data of a difference Sadd_dif (Sadd_dif=Sadd−SaddA) between a sum Sadd of the output signals from the two strain detection elements, and a signal SaddA obtained by low-pass filtering the sum signal Sadd with the LPF 35A. The calculated evaluation value E is outputted as a detection result of the input load fluctuation detector 33. The evaluation value E may be an RMS value (mean square deviation (also referred to as a root mean square value)) of the difference values Sadd_dif within a predetermined period of time. Alternatively, the evaluation value E may be a standard deviation of the difference values Sadd_dif within a predetermined period of time. Alternatively, the evaluation value E may be a maximum value of the difference values Sadd_dif within a predetermined period of time. Alternatively, the evaluation value E may be an integrated value of absolute values of the difference values Sadd_dif within a predetermined period of time. The input load fluctuation detector 33 may calculate the evaluation value E by calculating the difference values Sadd_dif for the plurality of sensor units 20, respectively, and selecting one of the difference values or combining some or all of the difference values. The calculated evaluation value E may be outputted as a detection result of the input load fluctuation detector 33. The input load fluctuation detector 33 may detect the fluctuation component, based on a signal obtained by high-pass filtering a sum signal Sadd of the output signals from the two strain detection elements with an HPF (High Pass Filter). Any combination of at least two constructions, disclosed in the appended claims and/or the specification and/or the accompanying drawings should be construed as included within the scope of the present invention. In particular, any combination of two or more of the appended claims should be equally construed as included within the scope of the present invention. In any event, the present invention will become more clearly understood from the following description of preferred embodiments thereof, when taken in conjunction with the accompanying drawings. However, the embodiments and the drawings are given only for the purpose of illustration and explanation, and are not to be taken as limiting the scope of the present invention in any way whatsoever, which scope is to be determined by the appended claims. In the accompanying drawings, like reference numerals are used to denote like parts throughout the several views, and: A sensor-equipped wheel support bearing assembly according to a first embodiment of the present invention will be described with reference to The bearing segment 100 in the sensor-equipped wheel support bearing assembly, as shown in a cross-sectional view of The outer member 1 serves as a stationary member, and is of one piece construction having, on an outer periphery, a flange 1 The inner member 2 serves as a rotational member, and includes: a hub unit 9 having a wheel mounting hub flange 9 The outer member 1 serving as the stationary member has an outer diameter surface provided with four sensor units 20 serving as load detection sensors. In this description, the sensor units 20 are disposed on an upper surface area, a lower surface area, a right surface area, and a left surface area which are located on the outer diameter surface of the outer member 1 so as to correspond to upper-lower positions and front-rear positions relative to a tire contact surface. Each of the sensor units 20 includes strain detection elements 22 connected to a load calculation processing device 30 shown in In this embodiment, the sensor units 20 having an exemplary structure as shown in The load detection sensor is not limited to one as shown in In order to calculate loads Fx, Fy, Fz in three directions, i.e., X, Y, Z directions perpendicular to each other, or moment loads in the respective directions, a configuration for calculation using at least three sets of sensor information (output signals from sensor units) is necessary. In other words, a load detection system unit is provided which generates signal vectors so as to be extracted by processing a plurality of sensor signals (signals from a plurality of sensor units) as necessary, and executes load estimating calculation with the use of the signal vectors, thereby to obtain an input load F (={Fx, Fy, Fz, . . . }). The X direction corresponds to the anteroposterior direction of the vehicle, the Y direction corresponds to the axial direction, and the Z direction corresponds to the vertical direction. The loads to be calculated by the load calculation processor 32 are the loads in the X, Y, Z directions at a road surface contact point of a wheel. In the load detection system unit having such a configuration, load estimating calculation can be performed by determining a calculation coefficient matrix M and an offset M0 in numerical analysis or an experiment so as to satisfy the following relational expression to the extent that a linear approximation holds: in which, when the signal vector obtained from each sensor signal (each of the sensor signals from the plurality of sensor units) is represented as S, the signal vector S represents an input. The signal processor 31 shown in S (S0, S1, S2, . . . ): output signals from the respective strain detection elements 22 of all the sensor units 20; Sadd=S0+S1: a sum of the output signals S0, S1 from the two strain detection elements 22A, 22B of any one sensor unit 20; SaddA=LPF(S0+S1)=LPF(Sadd): a value obtained by filtering, with an LPF, the Sadd; Save: a moving average value of S; and Srms: a root mean square value of S. As shown in As described above as the problem of the conventional technique, if the fluctuations of an input load is included in high frequency band, an input component in the high frequency band is not included in SaddA having been subjected to filter processing with an LPF in accordance with the cutoff frequency of the filter processing. As a result, if the load calculation processor 32 executes load estimating calculation using only SaddA as a signal vector, no fluctuation component appears in a calculated load value that is outputted. In this case, the response and following characteristics with respect to the actual load are degraded. In order to prevent this, the input load fluctuation detector 33 includes: an Sadd calculation processing section 34 configured to calculate a sum Sadd of the output signals S0, S1 from the two strain detection elements 22A, 22B of each sensor unit 20; an HPF processing section 35 configured to filter the calculated sum signal Sadd with an HPF (High Pass Filter); and a fluctuation detection section 36 configured to extract a fluctuation component Sadd_dif (=Sadd−SaddA) from Sadd having been high-pass filtered. Hereinafter, the functions of the Sadd calculation section 34, the HPF processing section 35, and the fluctuation detection section 36 will be described in detail. [Sadd Calculation Processing Section 34] When the contact fixing segments 21 [HPF Processing Section 35] When the load acting on the sensor unit 20 fluctuates, as shown in In order to extract only a fluctuation component in a high frequency band (for example, a frequency band higher than a given frequency), a fluctuation component of a low frequency (for example, a component of a frequency lower than the given frequency) may be cut off, and the signal Sadd_dif (=Sadd−SaddA) centered at approximately zero as shown in [Fluctuation Detection Section 36 and Load Fluctuation Component Information] The fluctuation detection section 36 detects a fluctuation in the signal Sadd_dif inputted thereto, and outputs, to a load estimation calculation section 37 ( Furthermore, the evaluation value E may be calculated by calculating sum signals Sadd_dif for the plurality of sensor units 20, and selecting one of them or combining some or all of them. In this case, since the number of the sensor units 20 used for the detection is increased, the fluctuation detection section 36 can appropriately deal with the fluctuation components corresponding to more load directions, thereby improving the reliability of the detection result. The load calculation processor 32 shown in According to the load fluctuation component information from the input load fluctuation detector 33, the signal processor 31 may specify the number of samplings of the LPF processing performed on the sensor signal used in the load estimation calculation section 37 of the load calculation processor 32 to change the cutoff frequency of the LPF. Accordingly, the load fluctuation frequency can be flexibly changed, and noise reduction due to the filter effect can be expected. In this embodiment, a processing result in which noise is suppressed although delay time is somewhat large (the load output Fon based on the signal vector having been filtered by LPF processing) and a processing result in which delay time is minimized although noise is large (the load output Foff based on the signal vector having not been filtered to the LPF processing) are combined at an appropriate ratio. Thus, it is possible to obtain the load signal at a desired response speed in accordance with the traveling state and/or the road surface state. The combination ratio or proportions may be changed in accordance with, for example, the amplitude or frequency of the detected fluctuation component. When the fluctuation of the input load is in high frequency, the ratio of the load output Foff based on the signal vector not having been filtered by LPF processing is increased so that the estimated load can easily follow the fluctuation component. Thus, even when the fluctuation of the input load is in high frequency, an estimated load with high followability can be output. For example, as shown in For example, in a graph of where α and β satisfy the relations of the equations (3) and (4), and represent the proportions of the load output Foff and Fon, respectively. For example, as shown in For example, as shown in a graph of Using such proportions, the load output Fout does not change sharply in the boundaries of combination area, and therefore, a smooth output can be achieved. Next, a specific configuration of each of sensor units 20 shown in As shown in In each sensor unit 20, the three contact fixing segments 21 As a position, in the axial direction, where the contact fixing segments 21 Alternatively, a groove (not shown) may be formed, in each of mid-portions between three portions to which the three contact fixing segments 21 As the strain detection element 22, various elements can be used. For example, the strain detection element 22 may be formed as a metal foil strain gauge. In this case, the strain detection element 22 is generally fixed to the strain generation member 21 by adhesive medium. Also, the strain detection element 22 may be formed, as a thick film resistor, on the strain generation member 21. In the structure shown in In the structure shown in The interval, in the circumferential direction, between the two strain detection elements 22A, 22B may be set to be {½+n (n: integer)} times the pitch P with which the rolling elements 5 are arranged, or to be approximate thereto. Since each sensor unit 20 is provided at a position, in the axial direction, around the outboard-side row of the raceway surface 3 in the outer member 1, output signals from the strain detection elements 22A, 22B are affected by the rolling element 5 that passes near a portion where the sensor unit 20 is mounted. Further, also when the bearing is at a stop, the output signals from the strain detection elements 22A, 22B are affected by the positions of the rolling elements 5. When the rolling element 5 passes by the position closest to the strain detection elements 22A, 22B in each sensor unit 20 (or when the rolling element 5 is positioned at the closest position), the output signals from the strain detection elements 22A, 22B indicate maximum values, and the output signals are reduced as the rolling element 5 moves away from the closest position (or when the rolling element is located at a position away from the position). When the bearing rotates, the rolling elements 5 sequentially pass near the portion where each sensor unit 20 is mounted, with a predetermined arrangement pitch P. Therefore, the output signals from the strain detection elements 22A, 22B have waveforms approximate to a sinusoidal wave that periodically varies in a cycle of the pitch P with which the rolling elements 5 are arranged. Effects obtained by the embodiment of the present invention will be systematically described below:
As described above, in the sensor-equipped wheel support bearing assembly having the above configuration, a plurality of sensor units 20 are provided as a sensor for detecting a load acting on the bearing 100, and an output signal from each sensor unit 20 is processed by the signal processor 31 to generate a signal vector, a load acting on a wheel is calculated based on the signal vector by the load calculation processor 32, and a fluctuation component of the input load included in the output signal from each sensor unit 20 is detected by the input load fluctuation detector 33. The load calculation processor 32 calculates the load by applying a load calculation scheme that shifts according to the fluctuation component detected by the input load fluctuation detector 33. Therefore, it is possible to estimate an accurate load value no matter which frequency the fluctuation that occurs in the input belongs to. When a load acts between a tire of a wheel and a road surface, a load is also applied to the outer member 1 serving as the stationary member of the wheel support bearing 100, to generate deformation. In the exemplary structure shown in In the present embodiment, the four sensor units 20 are provided, and the sensor units 20 are disposed on the upper surface area, the lower surface area, the right surface area, and the left surface area, which are located, on the outer diameter surface of the outer member 1, so as to correspond to upper-lower positions and left-right positions relative to a tire contact surface, such that the sensor units 20 are equally spaced from each other in the circumferential direction so as to be different in phase by 90 degrees. Therefore, it is possible to estimate the load Fz on the wheel support bearing 100 in the vertical diction, the load Fx thereon in the anteroposterior direction, and the load Fy thereon in the axial direction. In the present embodiment, the outer member 1 serves as a stationary member. Alternatively, the present invention may be applicable to a vehicle-wheel bearing in which the inner member servers as a stationary member. In this case, the sensor units 20 are mounted on a peripheral surface, in an inner circumference, of the inner member. Further, in the present embodiment, the present invention is applied to the wheel support bearing 100 of the third generation type. Alternatively, the present invention may also applicable to a vehicle-wheel bearing of the first or second generation type in which a bearing portion and a hub are separate components, or a vehicle-wheel bearing of the fourth generation type in which a portion of an inner member is formed by an outer ring of a constant velocity joint. Also, the sensor-equipped wheel support bearing assembly may be applicable to a vehicle-wheel bearing for a driven wheel. Also, the sensor-equipped wheel support bearing assembly may be applicable to tapered roller type vehicle-wheel bearings of each generation type. Although the present invention has been fully described in connection with the preferred embodiments thereof with reference to the accompanying drawings which are used only for the purpose of illustration, those skilled in the art will readily conceive numerous changes and modifications within the framework of obviousness upon the reading of the specification herein presented of the present invention. Accordingly, such changes and modifications are, unless they depart from the scope of the present invention as delivered from the claims annexed hereto, to be construed as included therein. A sensor-equipped wheel support bearing assembly capable of estimating an accurate load value without depending on the frequency of fluctuation that occurs in an input load, is provided. A vehicle-wheel bearing (100) is provided with a plurality of sensors (20) for detecting a load applied thereto. The vehicle-wheel bearing (100) is provided with a signal processor (31) for generating signal vectors from output signals of the sensors, a load calculation processor (32) for calculating a load acting on a wheel, based on the signal vectors, and an input load fluctuation detector (33) for detecting a fluctuation component of the input load which is included in the output signals of the sensors (20). The load calculation processor (32) calculates the load by applying a load calculation scheme that shifts in accordance with the fluctuation component detected by the input load fluctuation detector (33). 1. A sensor-equipped wheel support bearing assembly comprising:
a wheel support bearing for rotatably supporting a vehicle wheel relative to a vehicle body structure, the bearing including: an outer member having an inner periphery formed with a plurality of rows of raceway surfaces; an inner member having an outer periphery formed with raceway surfaces that faces the respective raceway surfaces in the outer member; and a plurality of rows of rolling elements interposed between the facing raceway surfaces of the respective outer and inner members; a plurality of sensors provided in the wheel support bearing to detect a load acting on the wheel support bearing; a signal processor configured to process an output signal from the plurality of sensors to generate a signal vector; a load calculation processor configured to calculate a load acting on the wheel, based on the signal vector; and an input load fluctuation detector configured to calculate a fluctuation component of the input load which is included in the output signal from at least one of the plurality of sensors, wherein the load calculation processor calculates the load by applying a load calculation scheme that shifts in accordance with the fluctuation component detected by the input load fluctuation detector. 2. The sensor-equipped wheel support bearing assembly as claimed in the load calculation processor calculates the load based on, out of the signal vector generated by the signal processor, a signal vector obtained without low-pass filtering the output signals from the sensors, when the fluctuation component detected by the input load fluctuation detector includes a high-frequency fluctuation component, and calculates the load based on, out of the signal vector generated by the signal processor, a signal vector obtained by low-pass filtering the output signals from the sensors, when the fluctuation component includes a low-frequency fluctuation component. 3. The sensor-equipped wheel support bearing assembly as claimed in when the load calculation processor calculates the load based on the signal vector obtained by low-pass filtering the output signals from the sensors, the signal processor specifies the number of samplings of the filter processing using a LPF to be performed on the output signals from the sensors, in accordance with the fluctuation component detected by the input load fluctuation detector, so that a cutoff frequency of the LPF is set. 4. The sensor-equipped wheel support bearing assembly as claimed in the load calculation processor calculates the load by combining a load value calculated based on, out of the signal vector generated by the signal processor, a signal vector obtained without low-pass filtering the output signals from the sensors, and a load value calculated based on, out of the signal vector generated by the signal processor, a signal vector obtained by low-pass filtering the output signals from the sensors, in accordance with the fluctuation component detected by the input load fluctuation detector. 5. The sensor-equipped wheel support bearing assembly as claimed in when an evaluation value E serving as criteria for determining whether the fluctuation component detected by the input load fluctuation detector includes a high-frequency fluctuation component or a low-frequency fluctuation component, is in a boundary area within a predetermined range of ±h (−h to +h) from a predetermined threshold C, the load calculation processor generates a calculation output Fout by combining a load value Foff calculated based on the signal vector obtained without low-pass filtering the output signals from the sensors, and a load value Fon calculated based on the signal vector obtained by low-pass filtering the output signals from the sensors, in accordance with proportions α and β expressed by the following equations:
where x is an increment of the evaluation value E from the threshold C, and α is a monotonically increasing function in which α=0 when x=−h, and α=1 when x=h. 6. The sensor-equipped wheel support bearing assembly as claimed in the function f(x) is represented by the following equation:
7. The sensor-equipped wheel support bearing assembly as claimed in the at least one sensor includes a sensor unit provided on an outer diameter surface of a stationary member which is either the outer member or the inner member, the sensor unit includes: a strain generation member having three contact fixing segments that are in contact with and fixed to the outer diameter surface of the stationary member; and two strain detection elements mounted to the strain generation member, and configured to detect a strain occurring in the strain generation member, the strain detection elements are provided between a first and a second contact fixing segments, of the strain generation member, adjacent to each other, and between the second and a third contact fixing segments thereof adjacent to each other, respectively, and an interval between the contact fixing segments adjacent to each other or an interval between the strain detection elements adjacent to each other is set to {n+½ (n: integer)} times a pitch with which the rolling elements are arranged. 8. The sensor-equipped wheel support bearing assembly as claimed in the input load fluctuation detector detects the fluctuation component, based on a difference Sadd_dif (Sadd_dif=Sadd−SaddA) between a sum Sadd of the output signals from the two strain detection elements, and a signal SaddA obtained by low-pass filtering the sum signal Sadd. 9. The sensor-equipped wheel support bearing assembly as claimed in the input load fluctuation detector calculates the evaluation value E based on past data of a difference Sadd_dif (Sadd_dif=Sadd−SaddA) between a sum Sadd of the output signals from the two strain detection elements, and a signal SaddA obtained by low-pass filtering the sum signal Sadd, and the calculated evaluation value E is outputted as a detection result of the input load fluctuation detector. 10. The sensor-equipped wheel support bearing assembly as claimed in the evaluation value E is an RMS value of the difference values Sadd_dif within a predetermined period of time. 11. The sensor-equipped wheel support bearing assembly as claimed in the evaluation value E is a standard deviation of the difference values Sadd_dif within a predetermined period of time. 12. The sensor-equipped wheel support bearing assembly as claimed in the evaluation value E is a maximum value of the difference values Sadd_dif within a predetermined period of time. 13. The sensor-equipped wheel support bearing assembly as claimed in the evaluation value E is an integrated value of absolute values of the difference values Sadd_dif within a predetermined period of time. 14. The sensor-equipped wheel support bearing assembly as claimed in the input load fluctuation detector calculates the evaluation value E by calculating the difference values Sadd_dif for the plurality of sensor units, respectively, and selecting one of the difference values or combining some or all of the difference values, and the calculated evaluation value E is outputted as a detection result of the input load fluctuation detector. 15. The sensor-equipped wheel support bearing assembly as claimed in the input load fluctuation detector detects the fluctuation component, based on a signal obtained by high-pass filtering a sum signal Sadd of the output signals from the two strain detection elements. CROSS REFERENCE TO THE RELATED APPLICATION
BACKGROUND OF THE INVENTION
PRIOR ART DOCUMENT
Patent Document
SUMMARY OF THE INVENTION
α=
β=1−α
α=BRIEF DESCRIPTION OF THE DRAWINGS
DESCRIPTION OF EMBODIMENTS
α=1/2
β=1−α (4)
α=cos2((
β=sin2((REFERENCE NUMERALS
α=
β=1−α
α=