ORDER PICKING METHOD AND DEVICE, AND STORAGE MEDIUM
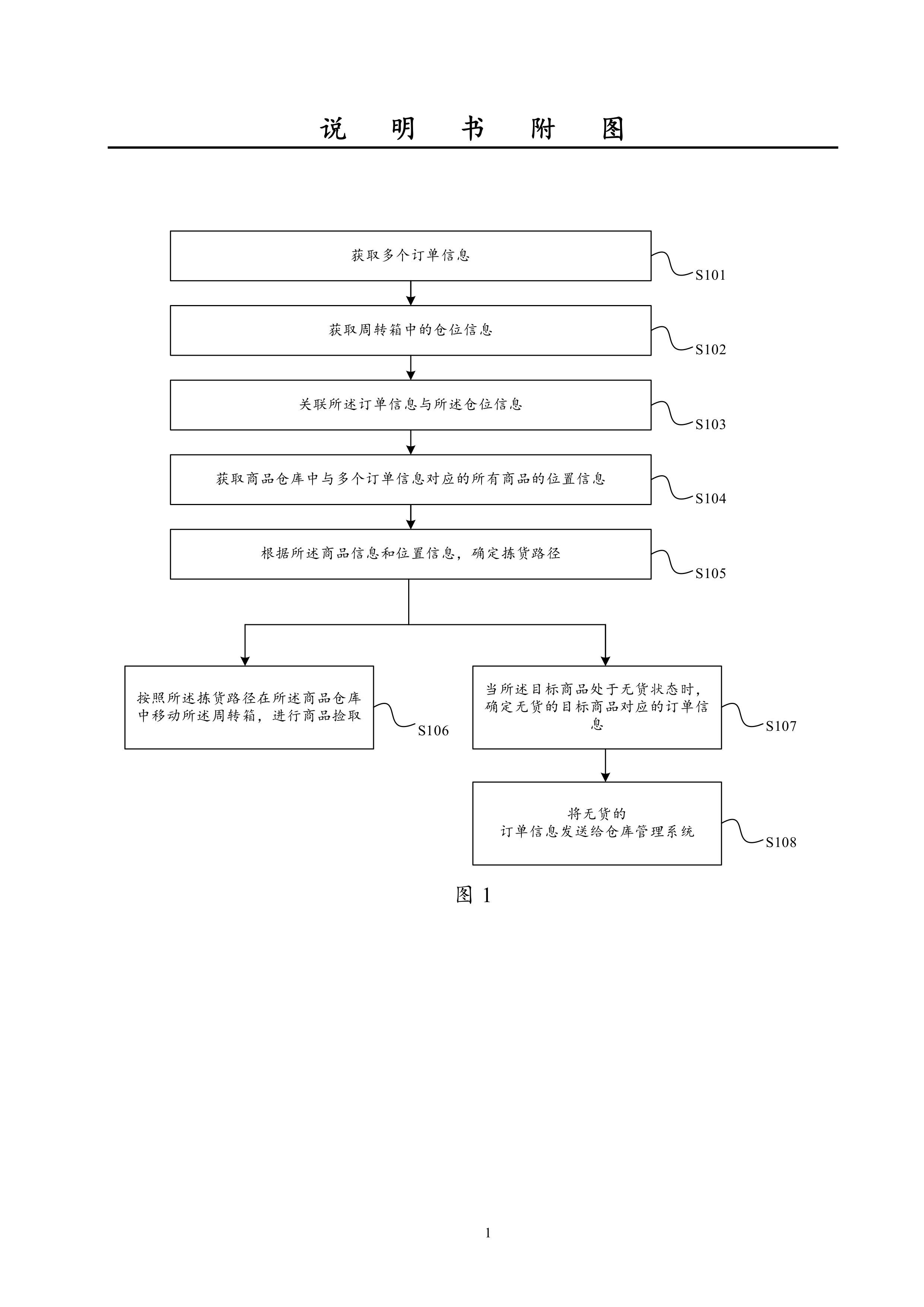
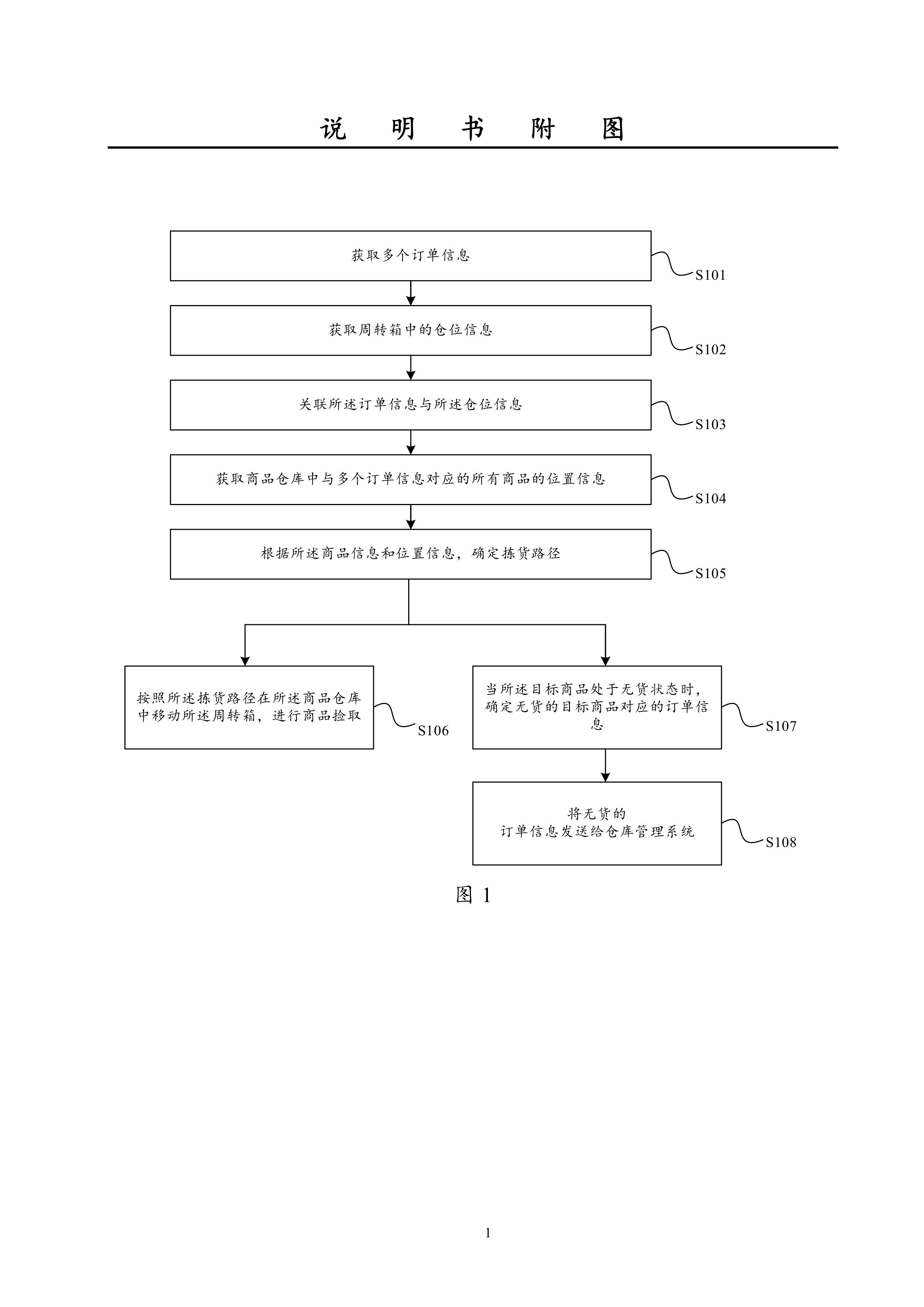
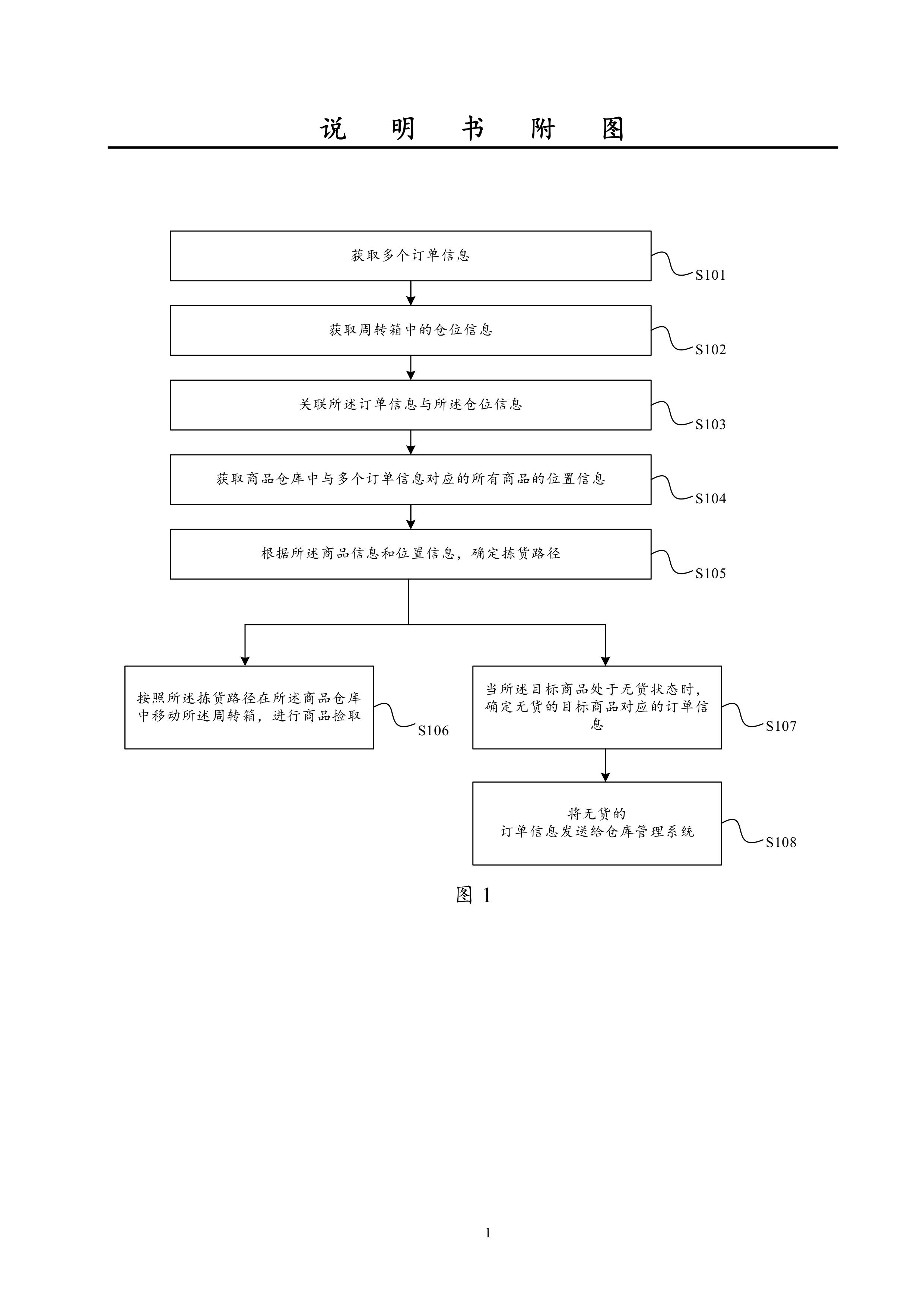
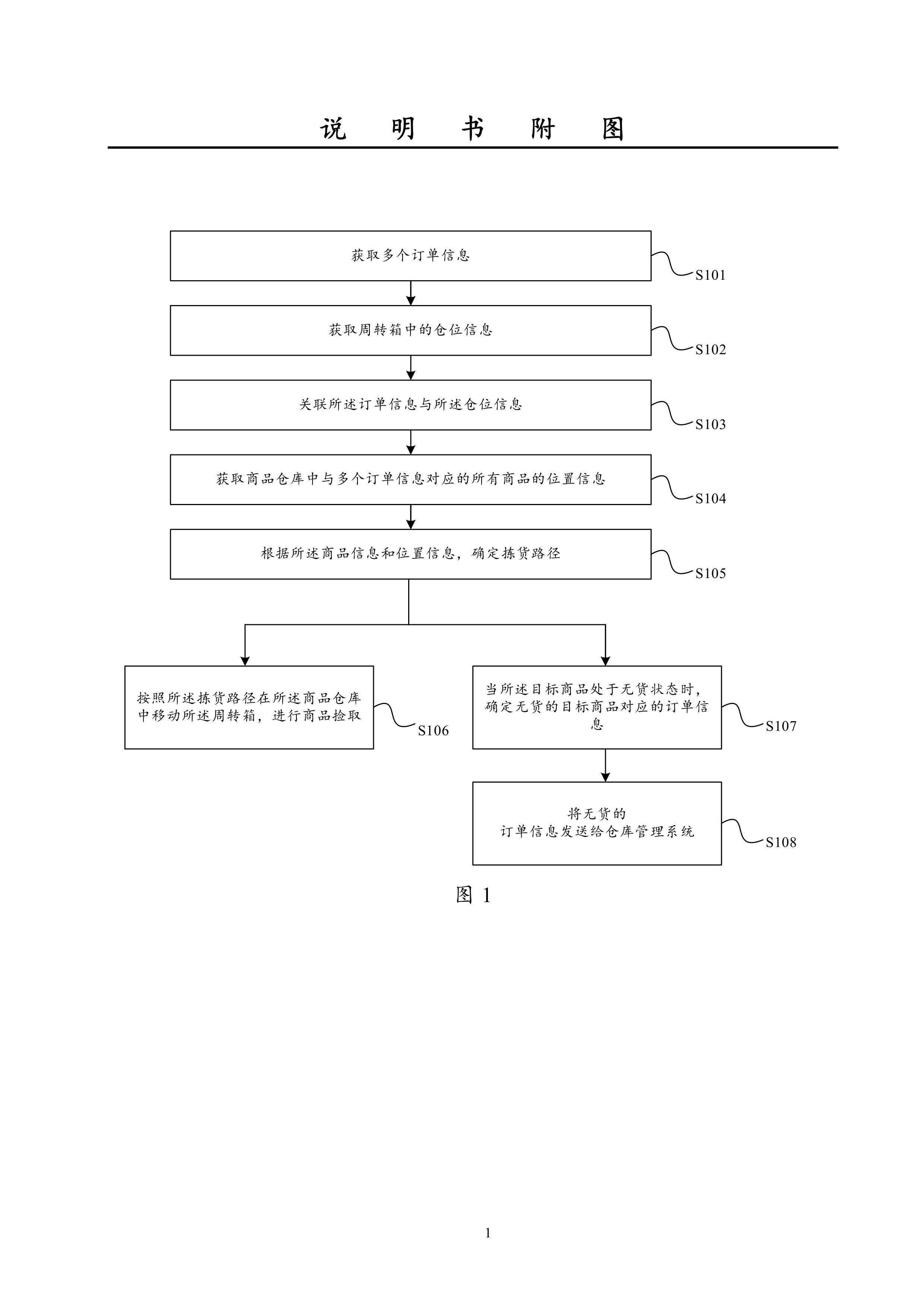
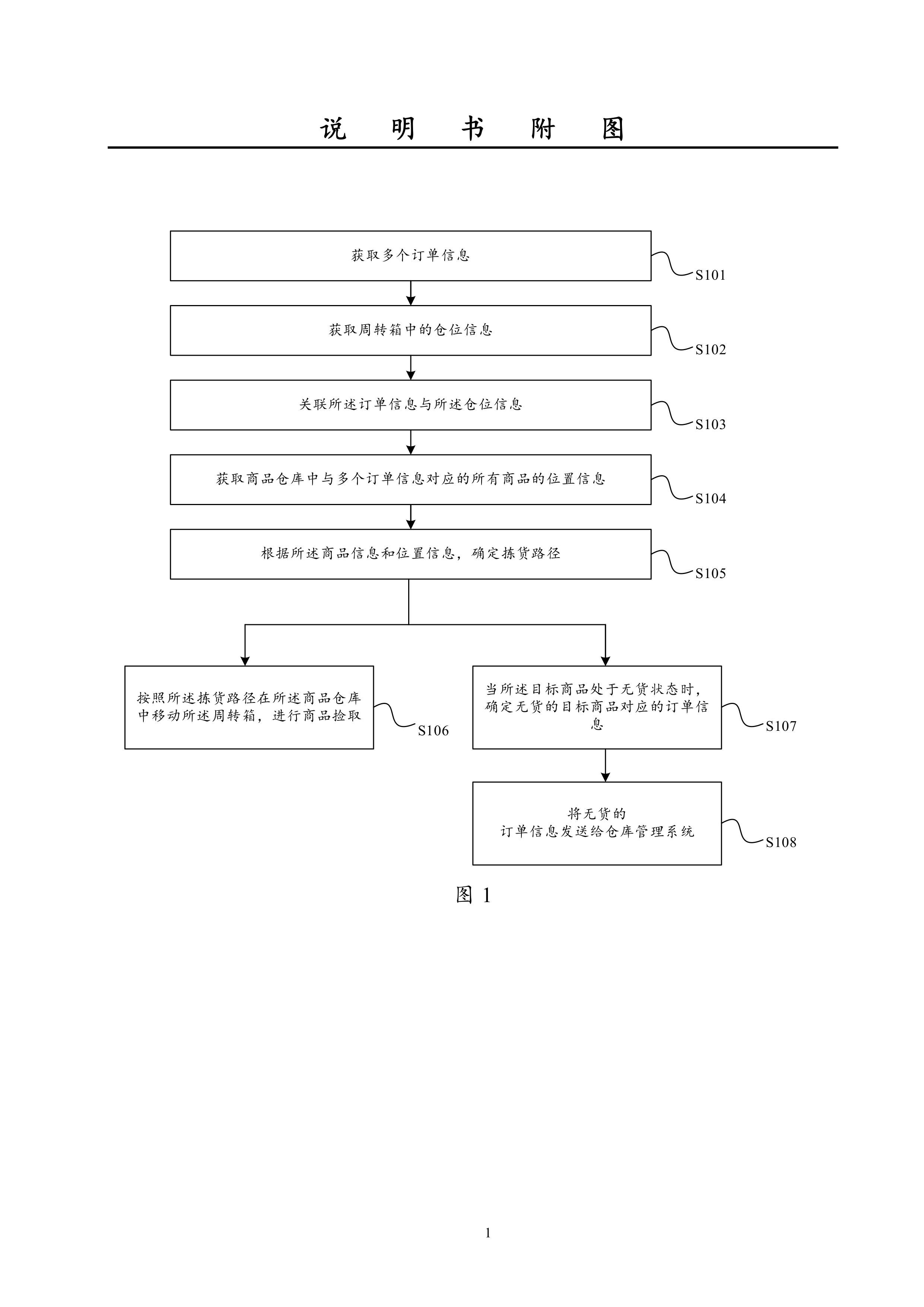
本发明实施例涉及智能拣货领域,尤其涉及一种拣货方法、设备及存储介质。 随着互联网和移动终端的极大普及,消费者更加习惯随时随地高频率的消费方式。由此对于传统电商来说,仓储的高效运转对于满足消费者日益增长的需求以及激烈竞争下良好的用户体验至关重要。电商仓储需要面对的挑战是每个订单的商品种类更少且订单数量暴增,在订单数量暴增的同时,多个订单之间往往存在相同的商品,高效地处理数量暴增的订单成为亟需解决的问题。 现有方案中,通常由仓库管理系统将多件订单按照一定规则合并为一大件拣选任务,并将此任务交给拣货员;单个拣货员在收到一大件拣选任务后,在单次往返中完成任务并交给后端的分货员;分货员需要将一大件拣选任务按照仓库管理系统分为合并前的多件订单,之后由打包员打包发货。 然而,现有方案中,存在拣货员往复拣货,且订单的合并和拆分,降低了拣选效率,整个流程任务加重,增加人力成本,效率低下。 鉴于此,为解决上述技术问题或部分技术问题,本发明实施例提供了一种拣货方法、设备及存储介质。 第一方面,本发明实施例提供一种拣货方法,包括: 获取至少订单信息,每个所述订单信息包括至少一件商品信息; 获取周转箱中的仓位信息,所述周转箱中设置有多个仓位; 关联所述订单信息与所述仓位信息,所述订单信息与仓位信息一一对应; 获取商品仓库中与多个订单信息对应的所有商品的位置信息; 根据所述商品信息和位置信息,确定拣货路径; 按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取。 第二方面,本发明实施例提供一种拣货设备,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的拣货程序,以实现上述第一方面任一项所述的拣货方法。 第三方面,本发明实施例提供一种计算机存储介质,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现上述第一方面任一项所述的拣货方法。 本发明实施例提供的拣货方案,通过获取多个订单信息以及获取周转箱仓位信息,将订单信息于仓位信息进行一一关联,每个仓位可用于盛放每个订单对应的所有商品,减少了将多个订单组合、拣货完成后再分拣的麻烦,节省人力,提升效率。 此外,通过获取商品仓库中与多个订单信息对应的所有商品的位置信息,根据目标商品信息和位置信息,确定拣货路径,采用机器人代替人工拣货,拣货员只需在货物架旁边等待机器人携带周转箱到来,再根据显示的待捡商品的商品信息和位置信息捡取商品,并放入对应的周转箱的仓位以完成商品捡取,进一步节省时间和人力,提升效率。 图1为本发明实施例提供的一种拣货方法的流程示意图; 图2为本发明实施例涉及的一种周转箱的结构示意图; 图3为本发明实施例涉及的目标商品位于商品仓库的位置信息示意图; 图4为本发明实施例提供的一种进行商品捡取方法的流程示意图; 图5为本发明实施例涉及的一种显示界面的显示信息示意图; 图6为本发明实施例涉及的另一种显示界面的显示信息示意图; 图7为本发明实施例提供的一种拣货装置的结构示意图; 图8为本发明实施例提供的一种拣货设备的硬件结构示意图。 为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。 为便于对本发明实施例的理解,下面将结合附图以具体实施例做进一步的解释说明,实施例并不构成对本发明实施例的限定。 图1为本发明实施例提供的一种拣货方法的流程示意图,如图1所示,该方法具体包括: S101、获取多个订单信息。 本发明实施例提供的拣货方案,可应用于物流领域(如根据订单从仓库中拣货发货),还可以应用于药房按照处方取药发药等领域;拣货方案可采用机器人执行,还可以采用其它具有处理器功能的设备代替机器人执行,本实施例中,以机器人为执行主体来进行介绍。 机器人从仓库管理系统中获取多个订单信息,每个订单信息包括至少一件商品信息,如现获取到4个订单信息(A、B、C、D),其中,订单A中包括商品e和f,订单B中包括商品e,订单C中包括商品e和h,订单D中包括商品f、g和h。 S102、获取周转箱中的仓位信息。 在本实施例中,周转箱内设置有多个仓位,每个仓位上可以设置仓位信息,周转箱可以是,但不限于:矩阵式容器,该矩阵器容器内被分割为多个仓位,每个仓位上设置的仓位信息可以是,但不限于:二维码标识、编号标识、颜色标识或图形标识。 参照图2,示出了本发明实施例涉及的一种周转箱的结构示意图,如图2所示,该周转箱被均匀分割为4个区域,每个单独的区域形成仓位,在每个仓位底部设置有仓位信息,或者在每个仓位的侧边面设置仓位信息。 需要说明的,周转箱的尺寸大小和仓位的数量,可根据实际需求进行设定,如设置8个、16个仓位等,对此,本实施例不作具体限定。 在本发明实施的一可选方案中,仓位信息可以采用上述四种标识中的一种或多种,如设置二维码标识和编号标识共同组成仓位信息。 如在图2形成的仓位中,将四个仓位进行标号,仓位一、仓位二、仓位三和仓位四,将二维码1和数字“一”组合成仓位1的仓位信息、将二维码2和数字“二”组合成仓位2的仓位信息、将二维码3和数字“三”组合成仓位3的仓位信息,以及将二维码4和数字“四”组合成仓位1的仓位信息。 除上述组合外,还可以采用其它形式的组合生成组成仓位信息,具体可根据实际需求进行设定,对此,本实施例不作具体限定。 在本实施例中,除仓位信息外,还可以在周转箱上设置周转箱的周转箱标识,并将每个周转箱内的所有仓位信息和周转箱标识进行存储,当获取到其中任意一个信息时,即可获取整个周转箱的信息。 在本实施例涉及的机器人上可以设置有扫码器,采用扫码的方式获取周转箱的仓位信息,此步骤也可以理解为:机器人挂载周转箱,将周转箱与机器人绑定,具体可采用如下步骤: 机器人通过扫码器扫取周转箱内多个仓位信息中的任意一个,即可获取周转箱的所有信息,如周转箱包括几个仓位、每个仓位对应的仓位信息等。 S103、关联所述订单信息与所述仓位信息。 机器人将订单信息与仓位信息进行关联,如,现有4个订单信息(A、B、C、D),可选取如图2所示的含有四个仓位的周转箱,具体关联的步骤可以是: 将订单信息A与仓位一关联(即扫取仓位一的仓位信息可获得订单信息A),将订单信息B与仓位二关联(即扫取仓位二的仓位信息可获得订单信息B),将订单信息C与仓位三关联(即扫取仓位三的仓位信息可获得订单信息C),将订单信息D与仓位四关联(即扫取仓位四的仓位信息可获得订单信息D)。 除上述关联关系外,还可以采用其它方式进行关联,如随机关联,将订单信息A与仓位四关联等,对此,本实施例不作具体限定。 在本发明实施的一可选方案中,当订单的数量大于所述周转箱的仓位数量时,按照预设顺序从多个订单信息中选取与所述仓位数量一致的订单信息与所述仓位信息关联,其中,预设顺序可以是:时间顺序、用户优先级顺序等。 如,现在有10订单需要拣货,但周转箱的仓位最多为8个,因此,可以按照订单的生成时间的顺序对10订单进行排序,选取生成时间最早的8个订单与周转箱的8个仓位进行关联。 在本发明实施的一可选方案中,还可以设置多种不同仓位数量的周转箱,如4个仓位的周转箱、8个仓位的周转箱、10个仓位的周转箱和16个仓位的周转箱等,设置不同仓位周转箱的目的在于可根据订单的数量选取合适的周转箱,提高订单分配的效率。 S104、获取商品仓库中与多个订单信息对应的所有商品的位置信息。 机器人通过仓库管理系统查询商品仓库中与多个订单信息对应的所有商品的位置信息,在此步骤执行前,机器人可将已关联的订单中商品的种类进行确定。 如,4个订单信息(A、B、C、D)中,共包含4种商品e、f、g和h,以及四个订单中,商品e共需求3件、商品f共需求2件、商品g共需求1件,以及商品h共需求2件。 机器人通过仓库管理系统查询商品e、f、g和h的位置信息。 其中,位置信息至少包括以下之一:商品名称、商品的存储位置或商品的数量。 如,商品名称:e,位于J区1排货架001,商品剩余量50件。 S105、根据所述商品信息和位置信息,确定拣货路径。 机器人通过仓库管理系统查找与多个订单信息对应的每个商品标识对应的仓库坐标;将每个商品标识对应的仓库坐标按照预设路径方式进行串联,得到所述拣货路径。 如图3所示,可以根据商品的远近关系规划拣货路径,商品e、f、g和h的拣货路径可以是:f-e-g-h,即机器人先到达商品f的拣货区域,再到达商品e的拣货区域,再到达商品g的拣货区域,最后到达商品h的拣货区域,通过出口到达打包区域。 S106、按照所述拣货路径在所述商品仓库中移动所述周转箱,完成商品捡取。 机器人携带周转箱根据拣货路径,到达待捡商品的指定位置,其中,机器人与周转箱的关系可以存在多种情况,如机器人上设置用于放置周转箱以及固定周转箱的部件,通过该部件可实现周转箱挂载于机器人上,或者在周转箱的底部设置车轮,机器人与周转箱采用缆绳连接,由机器人拖动周转箱的移动等,对此,本实施例不作具体限定。 在本本实施例中,完成目标商品捡取的由拣货员配合机器人完成,或者由机器人单独完成,参照图4,具体包括: S1061、控制所述周转箱在所述拣货路径中不同仓库坐标之间移动。在本发明实施的一可选方案中,待机器人移动至待捡取目标商品指定位置时,可向拣货员发出提示信息,该提示信息可以用于提示拣货员,来该位置拣货。 其中,待捡取目标商品的指定位置可以是目标商品所在货架的位置,也可以是目标商品的位置等。提示信息可以是多种形式,如采用蜂鸣器鸣笛、语音播报或者灯光闪烁的形式。 S1062、在所述周转箱移动至任意一个仓库坐标时,显示与所述仓库坐标相一致的商品标识、商品数量和货架坐标。 在机器人的显示界面对订单信息对应的目标商品信息和位置信息进行显示,其中,显示界面可以是机器人固有的显示面板或者终端设备的显示面板(该终端设备与机器人建立通信连接,以实现终端设备与机器人的交互)。 其中,显示的信息可以是:商品标识、商品数量和货架坐标等。 S1063、获取接收到的商品的商品标识。 S1064展示所述商品标识与所述周转箱中仓位信息的对应关系,以使拣货员根据所述仓位信息将所述商品放置于对应仓位。 进一步地,如图5所示,机器人的显示界面除可以显示:商品的名称、位置、数量外,还可以显示商品的图片(商品的图片可以采用背景显示的形式显示于显示界面上)以及提示拣货员将商品放入仓位的信息。显示目标商品的图片以及提示拣货员将商品放入仓位的信息可以通过拣货员将拣取商品的商品标识(如,条形码)放置于机器人的扫码器前进行扫码操作,进而在如图5所示的仓位信息处显示每个仓位需放入该仓位商品的数量。 例如,现机器人移动至商品e的拣货位置,此时,四个订单信息中有三个订单包含有商品e,且商品e的数量为3件,这时,可以在机器人的显示界面显示商品e的名称为:安卓手机,商品的位置为J-1-001(表示商品所属的货架信息),商品e的数量为3件,需要放入仓位一:1件、仓位二:1件、仓位三:1件(对应为订单信息A、B和C均包括1件商品e)。 S1065、接收拣货员对目标商品捡取完成的操作,移动至下一处,执行下一目标商品的捡取。 在拣货员将目标商品放置于对应仓位后,可通过显示界面上的触发完成按钮,以通知机器人已完成当前目标商品的捡取操作,机器人查询下一待捡目标商品的位置的路径信息,移动至下一处,执行下一目标商品的捡取。 在本发明实施的一可选方案中,除拣货员辅助机器人进行拣货操作外,机器人还可以单独执行拣货操作,具体包括:根据目标商品信息、位置信息和仓位信息将所述目标商品放置于对应仓位。 S107、当所述目标商品处于无货状态时,确定无货的目标商品对应的订单信息。 S108、将无货的订单信息发送给仓库管理系统。 如图6所示,当商品仓库中的目标商品出现无货状态时,拣货员通过显示界面上的触发无货按钮,即可将该件目标商品属于无货状态,机器人确定包含该件目标商品的订单信息,并取消上述订单信息的拣货,并将订单信息发送给仓库管理系统,以使通知送货员对缺货的目标商品进行送货,在送货完成后,在执行上述订单的拣货任务。 本发明实施例提供的拣货方案,通过获取多个订单信息以及获取周转箱仓位信息,将订单信息于仓位信息进行一一关联,每个仓位可用于盛放每个订单对应的所有商品,减少了将多个订单组合、拣货完成后再分拣的麻烦,节省人力,提升效率。 获取商品仓库中与多个订单信息对应的所有商品的位置信息,根据目标商品信息和位置信息,确定拣货路径,采用机器人代替人工拣货,拣货员只需在货物架旁边等待机器人携带周转箱到来,再根据显示的待捡商品的商品信息和位置信息捡取商品,并放入对应的周转箱的仓位以完成商品捡取,相对于现有拣货方案,节省时间和人力,提升效率。 图7为本发明实施例提供的一种拣货装置的结构示意图,如图7所示,该装置具体包括: 获取模块701,用于获取多个订单信息,每个所述订单信息包括至少一件商品信息; 所述获取模块701,还用于于获取周转箱中的仓位信息,所述周转箱中设置有多个仓位; 关联模块702,用于关联所述订单信息与所述仓位信息,所述订单信息与仓位信息一一对应; 所述获取模块701,还用于获取商品仓库中与多个订单信息对应的所有商品的位置信息; 确定模块703,用于根据所述商品信息和位置信息,确定拣货路径; 控制模块704,用于按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取。 可选地,所述商品信息包括:商品标识,所述位置信息包括:仓库坐标;所述确定模块703,具体用于查找与多个订单信息对应的每个商品标识对应的仓库坐标;将每个商品标识对应的仓库坐标按照预设路径方式进行串联,得到所述拣货路径。 可选地,所述商品信息包括:商品数量,所述位置信息还包括:货架坐标; 所述控制模块704,具体用于控制所述周转箱在所述拣货路径中不同仓库坐标之间移动; 所述装置还包括,显示模块705,用于在所述周转箱移动至任意一个仓库坐标时,显示与所述仓库坐标相一致的商品标识、商品数量和货架坐标;获取接收到的商品的商品标识;展示所述商品标识与所述周转箱中仓位信息的对应关系,以使拣货员根据所述仓位信息将所述商品放置于对应仓位。 所述控制模块,还用于将接收到的商品放置于周转箱中与所述商品标识对应的仓位中。 可选地,所述确定模块703,用于当所述目标商品处于无货状态时,确定无货的目标商品对应的订单信息; 所述装置,还包括:发送模块706,用于将缺货的订单信息发送给仓库管理系统。 可选地,所述关联模块702,具体用于当订单的数量大于所述周转箱的仓位数量时,按照预设顺序从多个订单信息中选取与所述仓位数量一致的订单信息与所述仓位信息关联。 可选地,所述仓位信息至少包括以下之一:二维码标识、编号标识、颜色标识或图形标识。 本实施例提供的拣货设备可以是如图7中所示的拣货装置,可执行如图1中拣货方法中的所有步骤,进而实现图1所示拣货方法的技术效果,具体请参照图1相关描述,为简洁描述,在此不作赘述。 图8本发明实施例提供的一种拣货设备的硬件结构示意图,如图8所示,该拣货设备具体包括: 处理器810、存储器820、收发器830和显示面板840。 处理器810可以是中央处理器(central
processing unit, CPU),或者CPU和硬件芯片的组合。上述硬件芯片可以是专用集成电路(application-specific integrated circuit,ASIC),可编程逻辑器件(programmable
logic device,PLD)或其组合。上述PLD可以是复杂可编程逻辑器件(complex programmable logic device,CPLD),现场可编程门阵列(field-programmable
gate array,FPGA),通用阵列逻辑(generic array logic, GAL)或其任意组合。 存储器820用于存储各种应用,操作系统和数据。存储器820可以将存储的数据传输给处理器810。存储器820可以包括易失性存储器,非易失性动态随机存取内存(nonvolatile random access memory,NVRAM)、相变化随机存取内存(phase change RAM,PRAM)、磁阻式随机存取内存(magetoresistive RAM,MRAM)等,例如至少一个磁盘存储器件、电子可擦除可编程只读存储器(electrically erasable programmable
read-only memory,EEPROM)、闪存器件,例如反或闪存(flash memory, NOR)或是反及闪存(flash memory,
NAND)、半导体器件,例如固态硬盘(solid state disk,SSD)等。存储器820还可以包括上述种类的存储器的组合。 收发器830,用于发送和/或接收数据,收发器830可以是天线等。 显示面板840,用于显示和/接收数据,显示面板840可以是显示屏等。 所述各器件的工作过程如下: 处理器810,用于获取多个订单信息,每个所述订单信息包括至少一件商品信息; 处理器810,还用于获取周转箱中的仓位信息,所述周转箱中设置有多个仓位; 处理器810,还用于关联所述订单信息与所述仓位信息,所述订单信息与仓位信息一一对应; 处理器810,还用于获取商品仓库中与多个订单信息对应的所有商品的位置信息; 处理器810,还用于根据所述商品信息和位置信息,确定拣货路径; 处理器810,还用于按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取。 可选地,所述商品信息包括:商品标识,所述位置信息包括:仓库坐标;处理器810,具体用于查找与多个订单信息对应的每个商品标识对应的仓库坐标;将每个商品标识对应的仓库坐标按照预设路径方式进行串联,得到所述拣货路径。 可选地,所述商品信息包括:商品数量,所述位置信息还包括:货架坐标;处理器810,具体用于控制所述周转箱在所述拣货路径中不同仓库坐标之间移动; 显示面板840,用于在所述周转箱移动至任意一个仓库坐标时,显示与所述仓库坐标相一致的商品标识、商品数量和货架坐标;获取接收到的商品的商品标识;展示所述商品标识与所述周转箱中仓位信息的对应关系,以使拣货员根据所述仓位信息将所述商品放置于对应仓位。 可选地,处理器810,还用于将接收到的商品放置于周转箱中与所述商品标识对应的仓位中。 可选地,处理器810,用于当所述目标商品处于无货状态时,确定无货的目标商品对应的订单信息; 收发器830,用于将缺货的订单信息发送给仓库管理系统。 可选地,处理器810,具体用于当订单的数量大于所述周转箱的仓位数量时,按照预设顺序从多个订单信息中选取与所述仓位数量一致的订单信息与所述仓位信息关联。 可选地,处理器810,还用于配置 所述仓位信息至少包括以下之一: 二维码标识、编号标识、颜色标识或图形标识。 本实施例提供的机器人可以是如图8中所示的拣货设备,可执行如图1中拣货方法中的所有步骤,进而实现图1所示拣货方法的技术效果,具体请参照图1相关描述,为简洁描述,在此不作赘述。 结合本文中所公开的实施例描述的方法或算法的步骤可以用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(RAM)、内存、只读存储器(ROM)、电可编程ROM、电可擦除可编程ROM、寄存器、硬盘、可移动磁盘、CD-ROM、或技术领域内所公知的任意其它形式的存储介质中。 以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。 本发明实施例提供的拣货方法、设备和存储介质,通过获取多个订单信息以及获取周转箱仓位信息,将订单信息于仓位信息进行一一关联,每个仓位可用于盛放每个订单对应的所有商品,减少了将多个订单组合、拣货完成后再分拣的麻烦,节省人力,提升效率。此外,通过获取商品仓库中与多个订单信息对应的所有商品的位置信息,根据目标商品信息和位置信息,确定拣货路径,采用机器人代替人工拣货,拣货员只需在货物架旁边等待机器人携带周转箱到来,再根据显示的待捡商品的商品信息和位置信息捡取商品,并放入对应的周转箱的仓位以完成商品捡取,进一步节省时间和人力,提升效率。因此,具有工业实用性。 The embodiments of the present invention relate to an order picking method and device, and a storage medium. The method comprises: acquiring at least one piece of order information (S101); acquiring information of storage bins in a circulation box, wherein multiple storage bins are arranged in the circulation box (S102); associating the order information with the information of storage bins, wherein the order information is in one-to-one correspondence with the information of storage bins (S103); acquiring position information of all commodities, corresponding to multiple pieces of order information, in a commodity warehouse (S104); determining an order picking path according to commodity information and the position information (S105); and moving the circulation box in the commodity warehouse according to the order picking path in order to complete commodity picking (S106). A robot is used as a replacement for manual order picking, and an order picker only needs to wait, beside a commodity shelf, for the robot to bring a circulation box, wherein same then picks up commodities according to the displayed commodity information and position information of the commodities to be picked, and places the commodities into a corresponding storage bin of the circulation box to complete commodity picking. Compared with the existing order picking scheme, the present application saves on time and labor, and improves the efficiency thereof. 一种拣货方法,所述方法包括: 获取至少一个订单信息,每个所述订单信息包括至少一件商品信息; 获取周转箱中的仓位信息,所述周转箱中设置有多个仓位; 关联所述订单信息与所述仓位信息,所述订单信息与仓位信息一一对应; 获取商品仓库中与所述订单信息对应的所有商品的位置信息; 根据所述商品信息和位置信息确定拣货路径; 按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取。 根据权利要求1所述的方法,其中,所述商品信息包括商品标识,所述位置信息包括仓库坐标;所述根据所述商品信息和位置信息确定拣货路径,包括: 查找与所述订单信息对应的每个商品标识对应的仓库坐标; 将每个商品标识对应的仓库坐标按照预设路径方式进行串联,得到所述拣货路径。 根据权利要求2所述的方法,其中,所述商品信息还包括商品数量,所述位置信息还包括货架坐标; 所述按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取,包括: 控制所述周转箱在所述拣货路径中不同仓库坐标之间移动; 在所述周转箱移动至任意一个仓库坐标时,显示与所述仓库坐标相一致的商品标识、商品数量和货架坐标; 获取接收到的商品的商品标识; 展示所述商品标识与所述周转箱中仓位信息的对应关系,以使拣货员根据所述仓位信息将所述商品放置于对应仓位。 根据权利要求3所述的方法,其中,所述方法,还包括: 在所述周转箱移动至任意一个仓库坐标时,发出提示信息。 根据权利要求2或4所述的方法,其中,所述按照所述拣货路径在所述商品仓库中移动所述周转箱,进行商品捡取,还包括: 将接收到的商品放置于周转箱中与所述商品标识对应的仓位中。 根据权利要求1所述的方法,其中,所述方法,还包括: 当所述目标商品处于无货状态时,确定无货的目标商品对应的订单信息; 将无货的订单信息发送给仓库管理系统。 根据权利要求1所述的方法,其中,所述方法,还包括: 当订单的数量大于所述周转箱的仓位数量时,按照预设顺序从多个订单信息中选取与所述仓位数量一致的订单信息与所述仓位信息关联。 根据权利要求1所述的方法,其中,所述仓位信息至少包括以下之一: 二维码标识、编号标识、颜色标识或图形标识。 一种拣货设备,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的拣货程序,以实现权利要求1~8中任一项所述的拣货方法。 一种计算机存储介质,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现权利要求1~8中任一项所述的拣货方法。技术领域
背景技术
技术问题
技术解决方案
有益效果
附图说明
本发明的实施方式
工业实用性