Steuerungssystem für einen Optikachsenwinkel eines Frontlichts
Ein Steuerungssystem 1 für einen Winkel (Theta) einer optischen Achse (Optikachsenwinkel) eines Frontlichts eines Fahrzeugs umfasst ein Frontlicht (10), einen Höhensensor (19) zur Erfassung der Höhe des Fahrzeugs, sowie eine Betätigungseinrichtung (11) zum Ändern des Optikachsenwinkels (Theta) des Frontlichts auf der Basis eines Ausgangswerts des Höhensensors. Das System umfasst ebenfalls eine elektronische Steuerungseinheit ECU (20), die eine abnormale Änderung des Ausgangswerts des Höhensensors ermittelt, und die die Betätigungseinrichtung ansteuert zum unveränderten Aufrechterhalten des Optikachsenwinkels (Theta) des Frontlichts ungeachtet des Ausgangswerts des Höhensensors, wenn eine abnormale Änderung ermittelt wird.
[0001] Die vorliegende Erfindung betrifft ein Steuerungssystem eines Winkels einer optischenAchse eines Frontlichts für Fahrzeuge, sowie ein zugehöriges Verfahren, wobei die Steuerungdes Winkels der optischen Achse des Frontlichts in Verbindung mit der Ausgabe eines Höhensensorserfolgt.
[0002] Bei einem bekannten adaptiven Frontlichtsystem (AFS) bzw. Frontscheinwerfersystem erfolgtdie Änderung der radialen Lichtrichtung (Winkel der optischen Achse, Optikachsenwinkel) derFrontlichter (Scheinwerfer) eines Fahrzeugs derart, dass ein Frontbereich vor dem Fahrzeug,den ein Fahrer überschauen möchte, ausgeleuchtet wird. Dieses System umfasst zwei Steuerungen.Die eine besteht aus einer Niveauausgleichssteuerung zum Ändern des Optikachsenwinkels des Frontlichtsin vertikaler Richtung (Auf- und Abwärtsrichtung), und die andere besteht in einer Schwenkungssteuerungzum Ändern des Optikachsenwinkels eines Frontlichts in horizontaler Richtung (Richtungen nachden Seiten bzw. Links- und Rechtsrichtung).
[0003] Bei der Niveauausgleichssteuerung gemäß der Offenbarung in der Druckschrift JP 2005-350014 A wird beispielsweise ein Neigungswinkel zur Angabe der Neigung eines Fahrzeugs auf derBasis einer Differenz zwischen den Fahrzeughöhen eines vorderen Teils und eines hinteren Teilsberechnet, und es wird ein Optikachsenwinkel des Frontlichts auf der Basis des berechneten Neigungswinkelsund der gleichen verändert, um einer Differenz der Fahrzeughöhen entgegen zu wirken. Ist beispielsweiseentsprechend der Lage des Fahrzeugs die vordere Höhe niedriger als die hintere Höhe, dann wirdder Optikachsenwinkel relativ zu dem Erdboden bzw. der Strassenoberfläche vergrößert, sodass dieoptische Achse mehr nach oben bewegt wird. Durch diese Schwenkungssteuerung erfolgt durch dasFrontlicht (Scheinwerfer) immer eine Ausleuchtung eines vorderen Bereichs, der in einem vorbestimmtenAbstand zu dem Fahrzeug liegt, wobei andere entgegenkommende Fahrzeuge nicht geblendet werden.
[0004] Hierbei werden Höhensensoren verwendet zur Erfassung der vorderen und hinteren Höhendes Fahrzeugs. Falls ein Ausgangswert wie eine Ausgangsspannung des Höhensensors einen vorbestimmtenSchwellenwert überschreitet, der zur Sensorausfallerfassung eingestellt ist, dann wird bestimmt,dass der Höhensensor einen Fehler aufweist bzw. fehlerhaft arbeitet. In dem bekannten Systemist jedoch eine Zeitdauer erforderlich zur Bestimmung des Fehlers des Höhensensors. Auch wenndaher der vordere Höhensensor abgeschaltet wird und sein Ausgangswert unmittelbar abfällt, wird ausbestimmten Gründen die vordere Höhe als vermindert bzw. abgesenkt ermittelt, und es wird daraufhinder Winkel der optischen Achse vergrößert. Diese Vergrößerung des Winkels der optischen Achseist geeignet, entgegen kommende Fahrzeuge zu blenden.
[0005] Der vorliegenden Erfindung liegt daher die Aufgabe zugrunde, ein Steuerungssystem füreinen Optikachsenwinkel (d. h. den Winkel einer optischen Achse) eines Frontlichts und ein zugehöriges Verfahrenzur Steuerung derart auszugestalten, das im Falle eines Fehlers eines Höhensensors die Steuerungdes Winkels der optischen Achse des Frontlichts unterdrückt wird.
[0006] Gemäß einem Aspekt der vorliegenden Erfindung umfasst ein Steuerungssystem einer optischenAchse eines Frontlichts eines Fahrzeugs ein Frontlicht, einen Höhensensor zur Erfassung derHöhe des Fahrzeugs, und eine Betätigungseinrichtung zum Ändern des Optikachsenwinkels des Frontlichtsauf der Basis eines Ausgangswerts des Höhensensors. Das System umfasst ferner eine elektronischeSteuerungseinheit ECU zur Erfassung einer abnormalen Änderung des Ausgabewerts des Höhensensors, undzur Unterdrückung eines Winkeländerungsvorgangs der Betätigungseinrichtung, wenn die abnormaleÄnderung ermittelt wird. Die Unterdrückung kann darin bestehen, das der Optikachsenwinkel desFrontlichts unverändert aufrechterhalten wird, ungeachtet des Ausgangswerts des Höhensensors.
[0007] Erfindungsgemäß wird diese Aufgabe durch ein Steuerungssystem für einen Optikachsenwinkeleines Frontlichts eines Fahrzeugs sowie durch ein Steuerungsverfahren für einen Optikachsenwinkeleines Frontlichts eines Fahrzeugs gemäß den zugehörigen Patentansprüchen gelöst.
[0008] Weitere Ausgestaltungen der vorliegenden Erfindung sind in den Unteransprüchen angegeben.
[0009] Die vorstehenden und weiteren Aufgabenmerkmale und Vorteile der vorliegenden Erfindungwerden aus der nachfolgenden detaillierten Beschreibung der zugehörigen Ausführungsbeispieleverständlich, die in Verbindung mit den zugehörigen Figuren erfolgt.
[0010] Es zeigen:
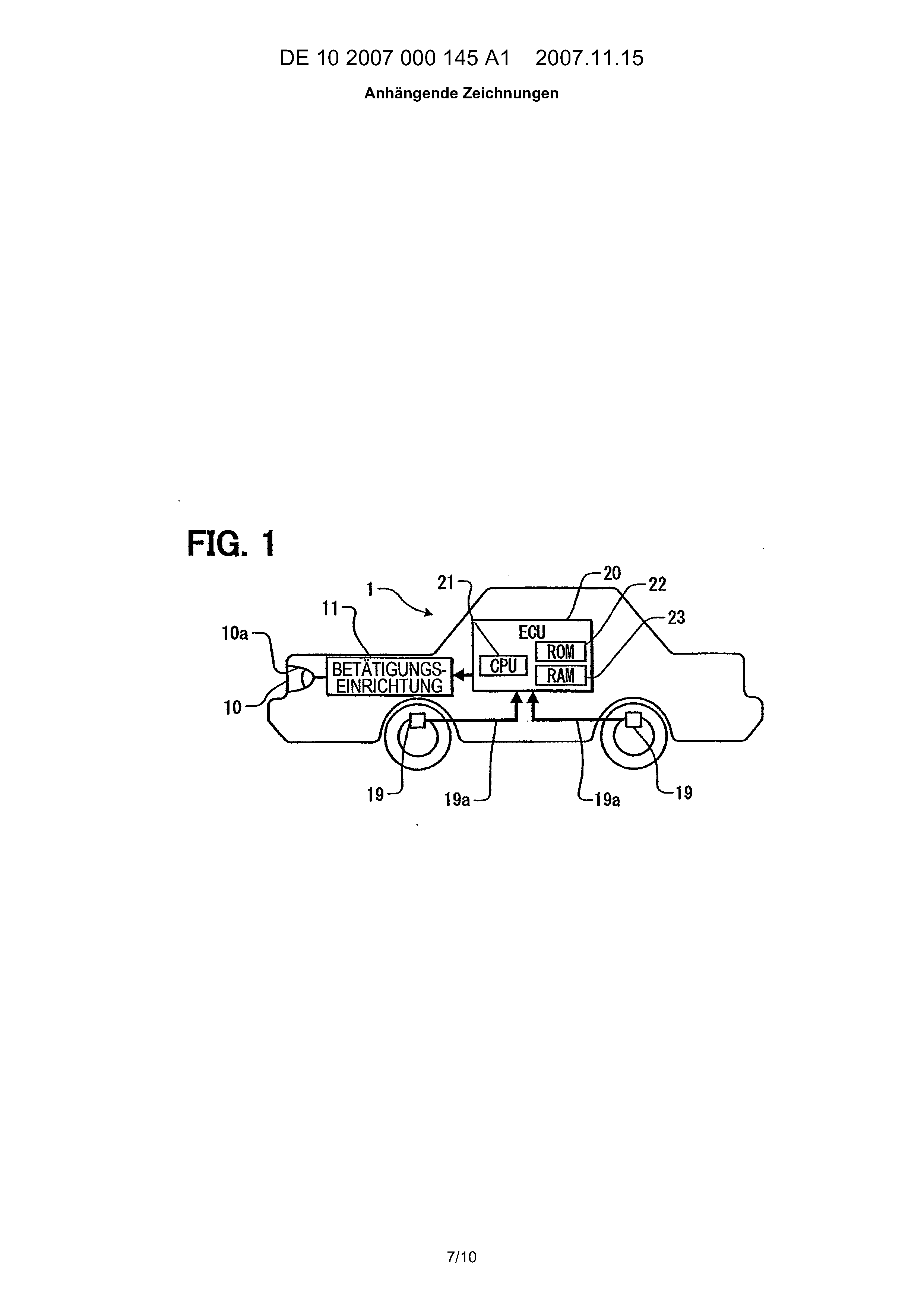
[0011] Fig. 1 eine schematische Darstellung zur Veranschaulichung eines Steuerungssystems einesOptikachsenwinkels eines Frontlichts gemäß einem Ausführungsbeispiel der vorliegenden Erfindung,
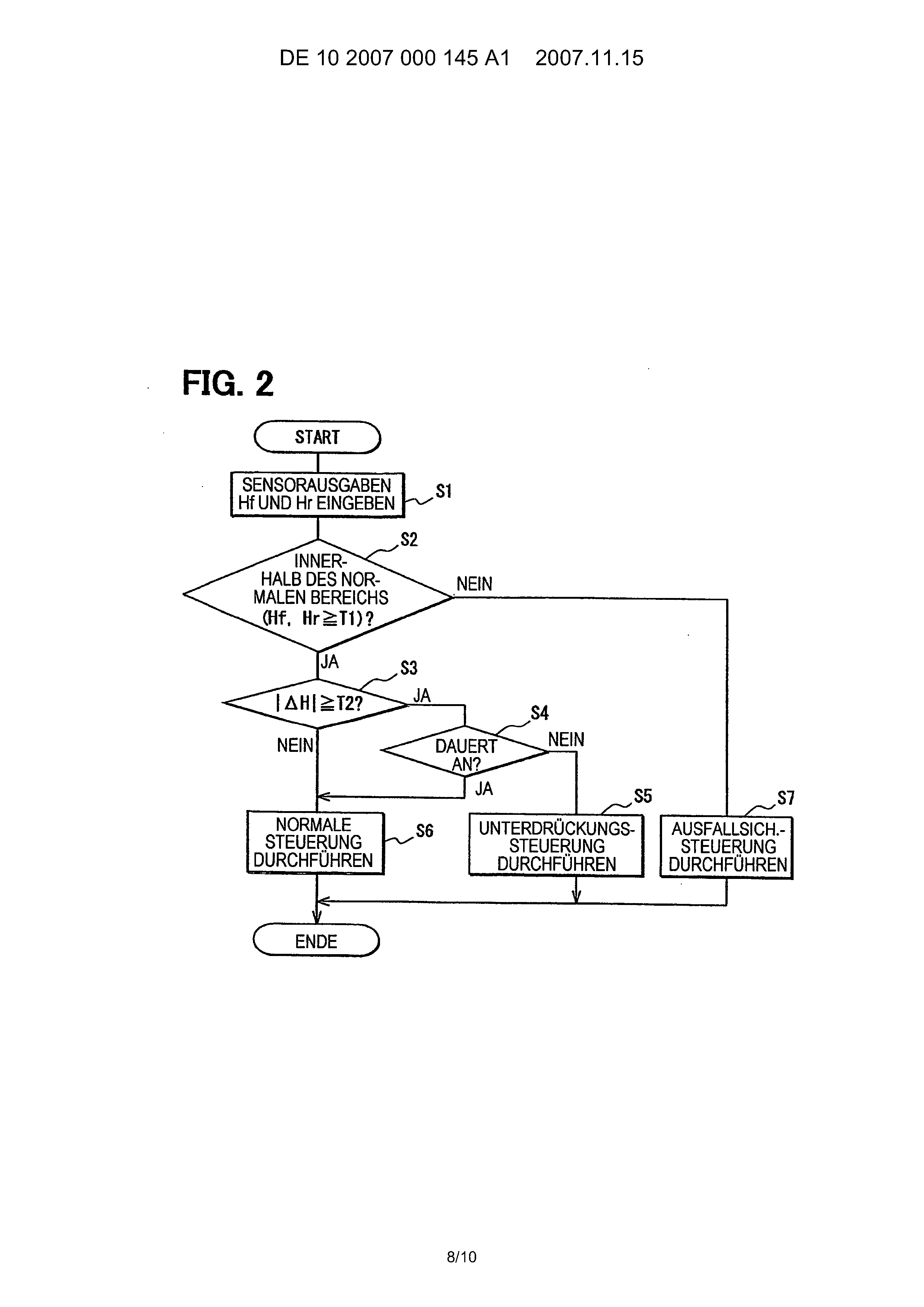
[0012] Fig. 2 ein Ablaufdiagram zur Veranschaulichung einer gemäß dem in Fig. 1 dargestellten Ausführungsbeispiel durchgeführten Steuerungdes Optikachsenwinkels des Frontlichts,
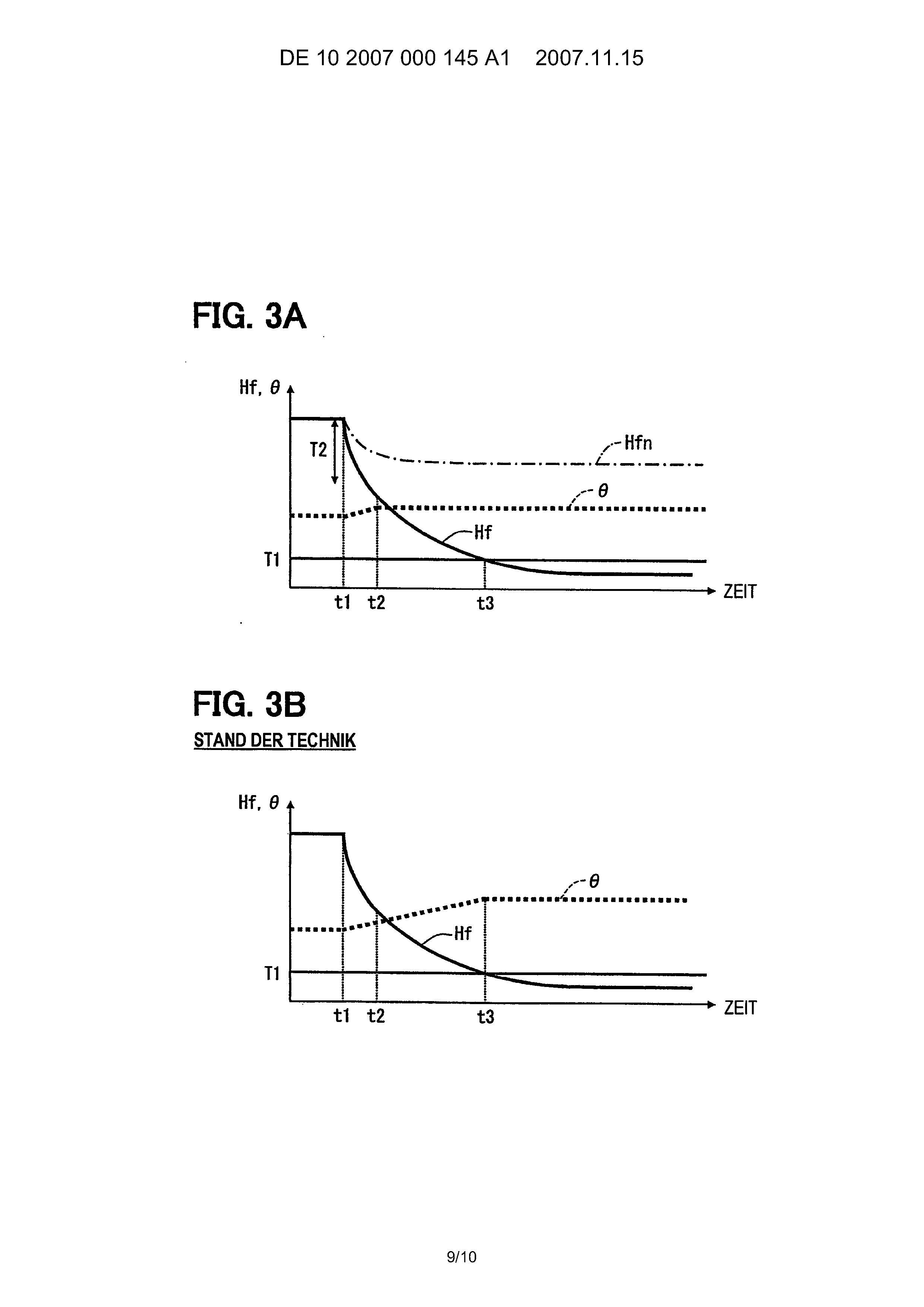
[0013] Fig. 3A und Fig. 3B Zeitdiagrame zur Veran-schaulichung der Steuerungsvorgänge des Optikachsenwinkels des Frontlichts, die jeweils gemäßdem in Fig. 1 gezeigtem Ausführungsbeispiel und in einem System gemäß dem Stand der Technikdurchgeführt werden, und
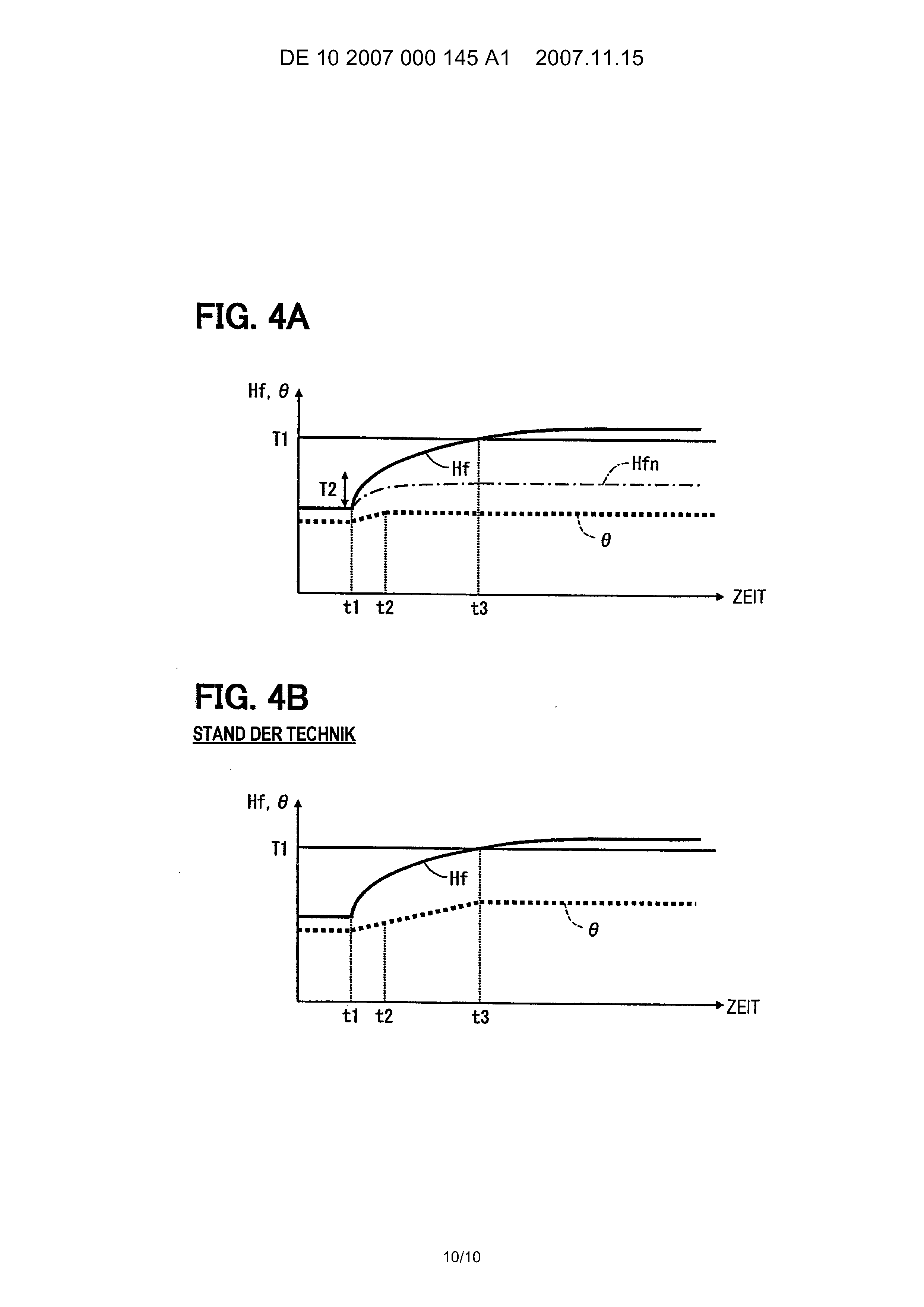
[0014] Fig. 4A und Fig. 4B Zeitdiagrame zur Veranschaulichung von Steuerungsvorgängen des Optikachsenwinkels desFrontlichts, die jeweils gemäß einem weiteren Ausführungsbeispiel der vorliegenden Erfindungund einem System gemäß dem Stand der Technik durchgeführt werden.
[0015] Gemäß der Darstellung in Fig. 1 umfasst ein Steuerungssystem eins eines Optikachsenwinkels(Winkel der optischen Achse) eines Frontlichts ein Frontlicht 10, eine Niveauausgleichs-Betätigungseinrichtung11, Höhensensoren 19 und eine elektronische Steuerungseinheit ECU 20.
[0016] Das Frontlicht 10 umfasst eine Licht-Reflektionsplatte (bzw. Reflektionsplatte) 10a undist an beiden linken und rechten Seiten eines vorderen Endes eines Fahrzeugs angeordnet. DieBetätigungseinrichtung 11 umfasst einen Elektromotor und eine (nicht gezeigte) Motoransteuerungsschaltung, wodurcheine Änderung des Winkels der Reflexionsplatte 10a bewirkt und dadurch eine Änderung des Winkelsder optischen Achse des Frontlichts 10 durchgeführt wird. Die Höhensensoren 19 sind in einemVorderachsenbereich der vorderen Räder und einem Hinterachsenbereich der hinteren Räder desFahrzeugs angeordnet und bilden bzw. erzeugen Ausgangsspannungen, die mit der Höhe des vorderenAchsenbereichs und des hinteren Achsenbereichs des Fahrzeugs veränderlich sind und die vorderenFahrzeughöhen Hf und die hinteren Fahrzeughöhen Hr bezeichnen. Der Höhensensor kann in der Weiseausgelegt sein, dass er das Ausdehnen (Expansion) oder das Zusammenziehen (Kontraktion) einesFahrgestells bzw. einer Radaufhängung des Fahrzeugs erfasst.
[0017] In diesem Ausführungsbeispiel wird ein Neigungswinkel des Fahrzeugs gegenüber der Bodenoberflächegemäß tan-1 {(Hf - Hr)/Wb} ausgedrückt, wobei Wb ein Radstand (Achsstand) des Fahrzeugszwischen der Vorderachse und der Hinterachse des Fahrzeugs bezeichnet.
[0018] Die elektronische Steuerungseinheit ECU 20 umfasst eine Zentralverarbeitungseinheit (CPU)21 zum Verarbeiten unterschiedlicher arithmetischer und logischer Operationen, eine SpeichereinrichtungROM 22 zum Speichern von Steuerungsprogrammen, eine Speichereinrichtung RAM 23 zum Speichernunterschiedlicher Daten, und andere zugehörige Teile. Die elektronische Steuerungseinheit ECUist mit den Höhensensoren 19 über Signalleitungen 19a verbunden, wobei die elektronische SteuerungseinheitECU 20 die Ausgangsspannungen der Höhensensoren 19 empfängt.
[0019] Die elektronische Steuerungseinheit 20, und insbesondere die Zentraleinheit CPU 21 berechneteinen Neigungswinkel (Front-Heck-Neigung) des Fahrzeugs, und berechnet einen Optikachsenwinkel(Winkel der optischen Achse) auf der Basis der vorderen und hinteren Höhen Hf und Hr, die durchdie Sensorausgangsspannungen angegeben sind, und berechnet einen Steuerungswert des Optikachsenwinkels, umauf diese Weise den Optikachsenwinkel des Frontlichts 10 mittels der Betätigungseinrichtung11 zu steuern. Bei der normalen (fehlerfreien) Optikachsensteuerung vergrößert oder vermindertjeweils die elektronische Steuerungseinheit ECU 20 den Optikachsenwinkel relativ zu dem Bodenbzw. der Erdoberfläche, wenn die vordere Höhe Hf niedriger oder höher als die hintere Höhe Hrwird. Daher wird das Frontlicht 10 (d. h. werden die Scheinwerfer) in der Weise gesteuert, dassein Frontbereich bis zu einem vorbestimmten Abstand vor dem Fahrzeug ausgeleuchtet wird, unddass entgegenkommende Fahrzeuge oder der gleichen nicht geblendet werden.
[0020] Die elektronische Steuerungseinheit ECU 20 und insbesondere die Zentraleinheit CPU 21sind in der Weise angeordnet, dass sie den Steuerungsvorgang für den Optikachsenwinkel gemäßder Darstellung in Fig. 2 alle vorbestimmten Intervalle durchführen.
[0021] Die Zentraleinheit CPU 21 gibt zuerst in einem Schritt S1 die Ausgangswerte Hf und Hrder Ausgangsspannung der Höhensensoren 19 nach einer Analog/Digital-Wandlung ein. Die AusgangswerteHf und Hr entsprechen normalerweise jeweils der vorderen Höhe und der hinteren Höhe des Fahrzeugs, solangedie Höhensensoren 19 normal, d.h. fehlerfrei arbeiten. Die Zentraleinheit CPU 21 überprüft sodann inSchritt S2, ob die Sensorausgangswerte Hf und Hr innerhalb eines vorbestimmten normalen Bereichsliegen. Ist beispielsweise der Höhensensor 19 mit der elektronischen Steuerungseinheit ECU 20über die Leitung 19a in der Weise verbunden, dass der Ausgangswert vermindert wird, wenn derHöhensensor 19 abgeschaltet oder die Signalleitung 19a unterbrochen wird, dann kann der Höhensensor19 als normal bestimmt werden, wenn der Ausgangswert gleich oder größer als ein vorbestimmterSchwellenwert T1 ist. Liegt der Ausgangswert in dem normalen Bereich, dann berechnet die ZentraleinheitCPU 21 ferner gemäß Schritt S3 eine Zeitänderung |H| der Höhe, d.h. ein Absolutwert einer Änderung zwischendem gegenwärtigen Eingabewert und dem vorherigen Eingabewert, und vergleicht diese Zeitänderung miteinem vorbestimmten Schwellenwert T2. Diese Zeitänderungsberechnung und der Vergleich kann für jedender Ausgangswerte des vorderen Höhensensors und des hinteren Hö-hensensors (Fronthöhensensor, Heckhöhensensor) durchgeführt werden.
[0022] Ist die Zeitänderung |H| kleiner als der Schwellenwert T2 und ist er damit normal, dannführt die Zentraleinheit CPU 21 eine normale Optikachsenwinkelsteuerung gemäß Schritt S6 inVerbindung mit einem Neigungswinkel durch, der als eine Differenz zwischen den AusgangswertenHf und Hr zur Angabe der vorderen Höhe und der hinteren Höhe berechnet wurde. Bei dieser normalenSteuerung wird der Optikachsenwinkel (Winkel der optischen Achse) innerhalb eines vorbestimmtenWinkelbereichs (beispielsweise von +/- 3°) in der vertikalen Richtung geändert. Ist die Zeitänderung |H|gleich oder größer als der Schwellenwert T2 und damit abnormal, dann überprüft die ZentraleinheitCPU 21 gemäß Schritt S4, ob die Zeitänderung |H| weiter andauernd größer als der SchwellenwertT2 für länger als eine vorbestimmte Zeitdauer ist, d.h. ob mehr als eine vorbestimmte Zeitdauerabgelaufen ist, nachdem die Zeitänderung |H| zum ersten Mal größer als der vorbestimmte SchwellenwertT2 wurde.
[0023] Liegt dies nicht länger als die vorbestimmte Zeit vor, d.h. befindet man sich unmittelbar nacheiner großen Zeitänderung, dann führt die Zentraleinheit CPU 21 gemäß Schritt S5 eine Unterdrückungssteuerung durch,bei der die Betätigungseinrichtung 11 angetrieben bzw. angesteuert wird zur Aufrechterhaltungdes Optikachsenwinkels unverändert gegenüber dem Optikachsenwinkel, der erhalten wird, wenndie Zeitänderung |H| zum ersten Mal größer als der Schwellenwert T2 wurde. Dies bedeutet, dassder gegenwärtige Optikachsenwinkel aufrechterhalten wird, ungeachtet etwaiger Änderungen indem Neigungswinkel und der gleichen. Diese Unterdrückungssteuerung gemäß Schritt S5 wird lediglichwährend der vorbestimmten Zeit durchgeführt, nachdem die Zeitänderung größer als der SchwellenwertT2 wird.
[0024] Dauert die Zeitänderung |H| mit einem Wert größer als der Schwellenwert T2 für länger alsdie vorbestimmte Zeitdauer an, während die Sensorausgabe innerhalb des normalen Bereichs liegt,dann wird angenommen, dass der Höhensensor 19 und die Signalleitung 19a in normaler Weise (fehlerfrei)arbeiten. In diesem Fall schaltet die Zentraleinheit CPU 21 ihre Steuerung von der Unterdrückungssteuerung (SchrittS5) zur normalen Steuerung (Schritt S6) um.
[0025] Liegt die Sensorausgabe (Ausgangssignal des Sensors) nicht innerhalb des normalen Bereichs,d.h. ist die Höhe Hf oder Hr kleiner als der Schwellenwert T1, dann liegt bei dem Höhensensor19 oder der Signalleitung 19a ein Fehler wie beispielsweise eine Unterbrechung vor. Daher führt dieZentraleinheit CPU 21 eine Ausfallsicherungssteuerung gemäß Schritt S7 nachfolgend zu SchrittS2 durch. Bei dieser Ausfallsicherungssteuerung kann die Zentraleinheit CPU 21 die Betätigungseinrichtung11 bezüglich eines vorbestimmten Winkels (von beispielsweise +/- 0°) relativ zu dem Boden ansteuern oderden Optikachsenwinkel unverändert belassen. Die Ausfallsicherungssteuerung kann um eine bestimmte Zeitdauerverzögert werden.
[0026] Der Betrieb des vorstehend angegebenen Ausführungsbeispiels ist in Fig. 3A im Vergleichzu einem Beispiel gemäß dem Stand der Technik in Fig. 3B gezeigt, wobei keine Unterdrückungssteuerung durchgeführt wird.
[0027] In den Fig. 3A und Fig. 3B wird angenommen, dass die Signalleitung 19a des Höhensensors19, der die vordere Höhe Hf ermittelt, zu dem Zeitpunkt T1 unterbrochen ist und somit die vordereHöhe Hf gemäß der Darstellung mittels durchgezogener Linien erheblich absinkt. Gemäß der Darstellung inFig. 3B ist der Optikachsenwinkel mittels einer gestrichelten Linie dargestellt und wird kontinuierlichvergrößert, da der Ausgangswert Hf, der in die elektronische Steuerungseinheit ECU 20 eingegebenwird, sich in dem System gemäß dem Stand der Technik vermindert. Diese kontinuierliche Vergrößerungkann zu einer Blendung entgegen kommender Fahrzeuge führen. Der Optikachsenwinkel wird alsdie Ausfallsicherungssteuerung von dem Zeitpunkt T3 unverändert aufrechterhalten, nachdem derAusgangswert Hf kleiner als der Schwellenwert T1 wird.
[0028] In der gleichen Situation, dass die Signalleitung 19a unterbrochen ist, wird gemäß demAusführungsbeispiel der Ausgangswert Hf mit einer größeren Geschwindigkeit als eine normaleVerminderung Hfn vermindert, wie es mittels einer strichpunktierten Linie in Fig. 3A angegeben ist.Im Ergebnis wird der Optikachsenwinkel , der mittels gestrichelter Linien bezeichnet ist, beginnensich zu vergrößern. Diese Vergrößerung wird jedoch beendet und es erfolgt eine unveränderteAufrechterhaltung nach dem Zeitpunkt t2, wenn die Zeitänderung |H| des Ausgangswerts Hf größerals der Schwellenwert T2 wird. Fällt der Ausgangswert Hf weiter unter den Schwellenwert T1,dann wird die Ausfallsicherungssteuerung zu dem Zeitpunkt t3 durchgeführt durch Aufrechterhaltendes Optikachsenwinkels in unveränderter Weise, oder durch Steuern des selben auf einen vorbestimmtenWinkel. Dabei ist zu beachten, das in dem Fall der Unterbrechung der Signalleitung 19a des Höhensensors19 zur Erfassung der hinteren Höhe Hr der Optikachsenwinkel im Sinne einer Verminderung gesteuertwird. Es wird jedoch die Verminderung unterdrückt und auf die gleiche Weise beschränkt, wie esvorstehend beschrieben wurde.
[0029] Im Gegensatz zu dem vorliegenden und vorstehend angegebenen Ausführungsbeispiel könnendie Höhensensoren 19 und die Signalleitungen 19a in der Weise aufgebaut sein, dass der Ausgangswert des Höhensensors 19 ansteigt, wenn die zugehörigeSignalleitung 19a unterbrochen ist. In diesem Fall wird entsprechend dem System gemäß dem Standder Technik und gemäß der Darstellung in Fig. 4B der Optikachsenwinkel kontinuierlich bis zudem Zeitpunkt t3 ansteigend bzw. vergrößert. Durch die Unterdrückungssteuerung gemäß der Darstellung inFig. 4A wird der Optikachsenwinkel lediglich nach dem Punkt t1 leicht angehoben und nach demZeitpunkt t2 unverändert aufrechterhalten, wobei zu dieser Zeit die Zeitänderung |H| den SchwellenwertT2 erreicht.
[0030] Die vorstehend angegebenen Ausführungsbeispiele können weiter auf unterschiedliche Weiseabgewandelt werden, die innerhalb des Bereichs der zugehörigen Patentansprüche liegen.
[0031] Somit umfasst ein Steuerungssystem 1 für einen Winkel einer optischen Achse (Optikachsenwinkel)eines Frontlichts eines Fahrzeugs ein Frontlicht 10, einen Höhensensor 19 zur Erfassung derHöhe des Fahrzeugs, sowie eine Betätigungseinrichtung 11 zum Ändern des Optikachsenwinkels des Frontlichts auf der Basis eines Ausgangswerts des Höhensensors. Das System umfasst ebenfallseine elektronische Steuerungseinheit ECU 20, die eine abnormale Änderung des Ausgangswerts desHöhensensors ermittelt, und die die Betätigungseinrichtung ansteuert zum unveränderten Aufrechterhaltendes Optikachsenwinkels des Frontlichts ungeachtet des Ausgangswerts des Höhensensors, wenneine abnormale Änderung ermittelt wird.
1. Steuerungssystem für einen Optikachsenwinkel eines Frontlichts eines Fahrzeugs, mit einemFrontlicht (10), einem Höhensensor (19) zur Erfassung einer Höhe des Fahrzeugs, und einer Betätigungseinrichtung (11)zum Ändern eines Optikachsenwinkels des Frontlichts auf der Basis eines Ausgangswerts des Höhensensors, wobeiwird das Steuerungssystem des Optikachsenwinkels des Frontlichts umfasst: eine Abnormaländerungserfassungseinrichtung (21,S3, S4) zur Erfassung einer abnormalen Änderung des Ausgangswerts des Höhensensors, und eineSteuerungseinrichtung (21, S5 bis S7) zum Unterdrücken eines Winkeländerungsvorgangs der Betätigungseinrichtung, wenneine abnormale Änderung ermittelt wird.
2. Steuerungssystem für einen Optikachsenwinkel eines Frontlichts nach Anspruch 1, wobeidie Steuerungseinrichtung (21, S5 bis S7) den Optikachsenwinkel des Frontlichts unverändertaufrecht erhält ungeachtet des Ausgangswerts des Höhensensors bei der Unterdrückung des Winkeländerungsvorgangs.
3. Steuerungssystem für einen Optikachsenwinkel eines Frontlichts nach Anspruch 2, wobeidie Abnormaländerungserfassungseinrichtung (21, S3, S4) eine Zeitänderung der Ausgangswertedes Höhensensors in einem vorbestimmten Intervall mit einem vorbestimmten Schwellenwert vergleichtund die abnormale Änderung erfasst, wenn die Zeitänderung größer als der vorbestimmte Schwellenwertist.
4. Steuerungssystem für einen Optikachsenwinkel eines Frontlichts nach einem der Ansprüche 1bis 3, wobei die Steuerungseinrichtung (21, S5 bis S7) den Winkeländerungsvorgang der Betätigungseinrichtung während einervorbestimmten Periode nach dem Erfassen der abnormalen Änderung unterdrückt, und sodann einennormalen Winkeländerungsvorgang der Betätigungseinrichtung nach der vorbestimmten Periode erlaubt,wenn der Ausgangswert des Höhensensors innerhalb eines normalen Bereichs liegt.
5. Steuerungssystem für einen Optikachsenwinkel eines Frontlichts nach einem der Ansprüche 1bis 4, ferner mit: einer Fehlererfassungseinrichtung (21, S2) zur Erfassung eines Fehlers desHöhensensors, wenn der Ausgangswert des Höhensensors außerhalb eines vorbestimmten normalenBereichs liegt, wobei die Steuerungseinrichtung (21, S5 bis S7) die Betätigungseinrichtung während einesvorbestimmten Ausfallsicherungsvorgangs ansteuert, wenn der Fehler ermittelt wird.
6. Steuerungsverfahren für einen Optikachsenwinkel eines Frontlichts eines Fahrzeugs, miteinem Frontlicht (10), einem Höhensensor (19) zur Erfassung einer Höhe des Fahrzeugs, und einer Betätigungseinrichtung (11)zur Änderung eines Optikachsenwinkels des Frontlichts auf der Basis eines Ausgangswerts desHöhensensors, wobei das Steuerungsverfahren des Optikachsenwinkels des Frontlichts die Schritteumfasst: Erfassen (S3) einer abnormalen Änderung des Ausgangswerts des Höhensensors, und Ansteuern(S5) der Betätigungseinrichtung zum unveränderten Aufrechterhalten des Optikachsewinkels desFrontlichts ungeachtet des Ausgangswerts des Höhensensors, wenn die abnormale Änderung ermitteltwird.
7. Steuerungsverfahren für einen Optikachsenwinkel eines Frontlichts gemäß Anspruch 6, wobeidas Erfassen (S3, S4) einen Vergleich einer Zeitänderung des Ausgangswerts des Höhensensors ineinem vorbestimmten Intervall mit einem vorbestimmten Schwellenwert durchführt, und die abnormaleÄnderung erfasst, wenn die Zeitänderung größer als der vorbestimmte Schwellenwert ist.
8. Steuerungsverfahren für einen Optikachsenwinkel eines Frontlichts nach Anspruch 6 oder7, ferner mit dem Schritt: Fortsetzten (S5 bis S7) des An-steuerns der Betätigungseinrichtung zum Aufrechterhalten des Optikachsenwinkels in unveränderterForm während einer vorbestimmten Periode, nach dem die abnormale Änderung ermittelt wurde, undAnsteuern (S6) der Betätigungseinrichtung zur Durchführung eines normalen Winkeländerungsvorgangs derBetätigungseinrichtung nach der vorbestimmten Periode, wenn der Ausgangswert des Höhensensors innerhalbeines normalen Bereichs liegt.
9. Steuerungsverfahren für einen Optikachsenwinkel eines Frontlichts nach einem der Ansprüche 6bis 8, ferner mit den Schritten: Erfassen (S2) eines Fehlers des Höhensensors, wenn der Ausgangswertdes Höhensensors außerhalb eines vorbestimmten normalen Bereichs liegt, und Ansteuern (S7) derBetätigungseinrichtung zur Durchführung eines vorbestimmten Ausfallsicherungsvorgangs, der unterschiedlich istzur unveränderten Aufrechterhaltung des Optikachsenwinkels, wenn der Fehler ermittelt wird.