Fahrzeugparksystem-Ausfallmanagement
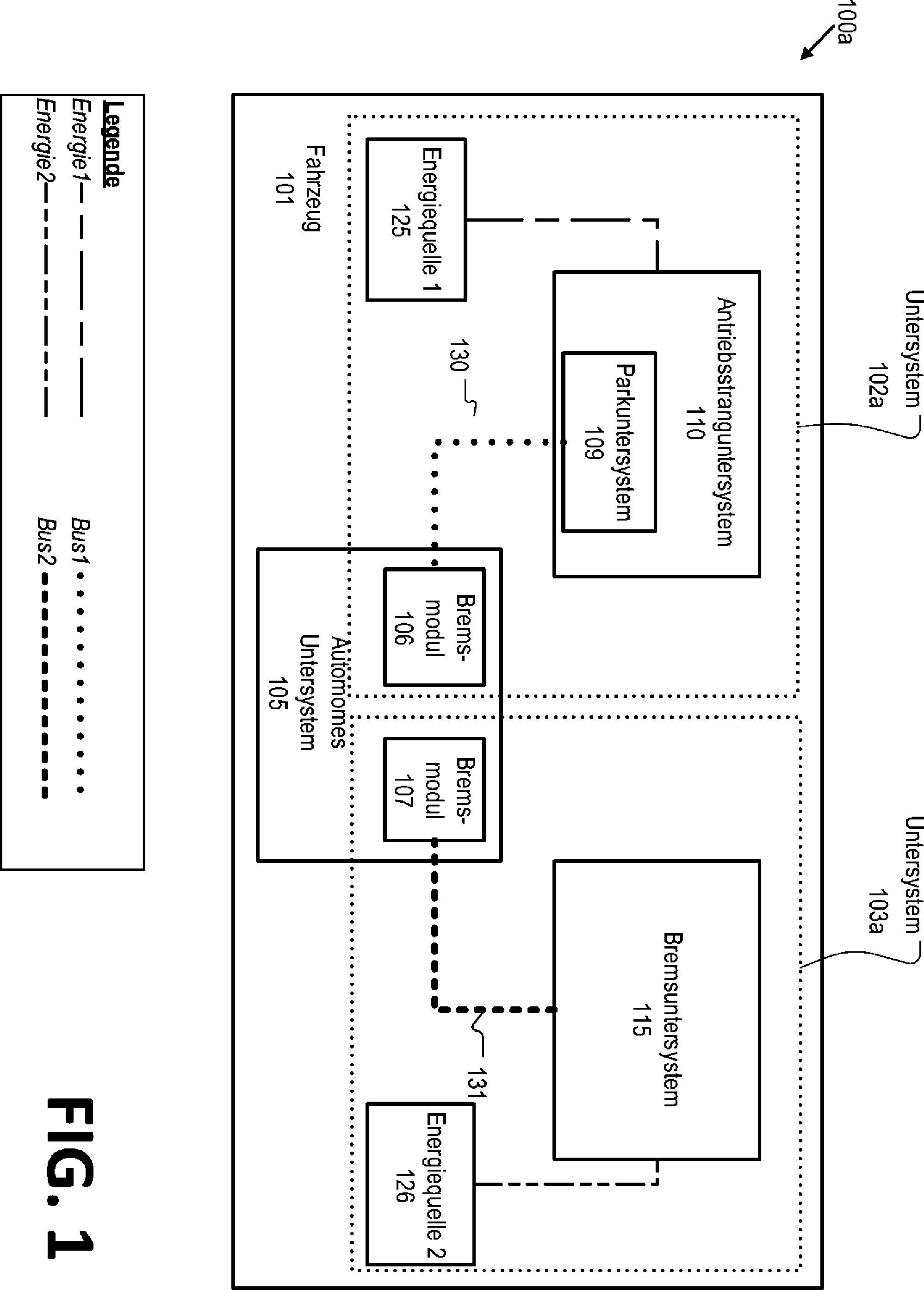
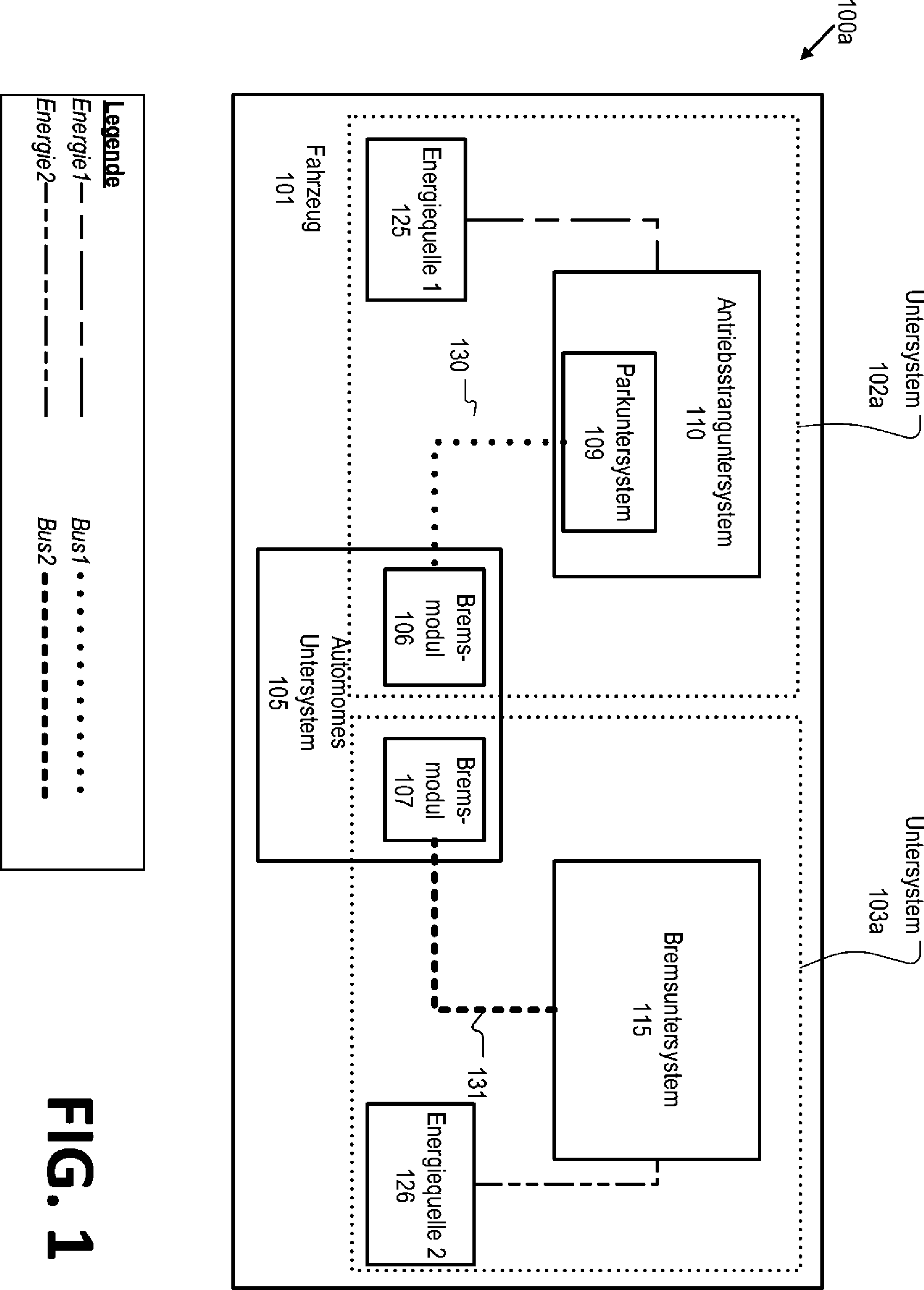
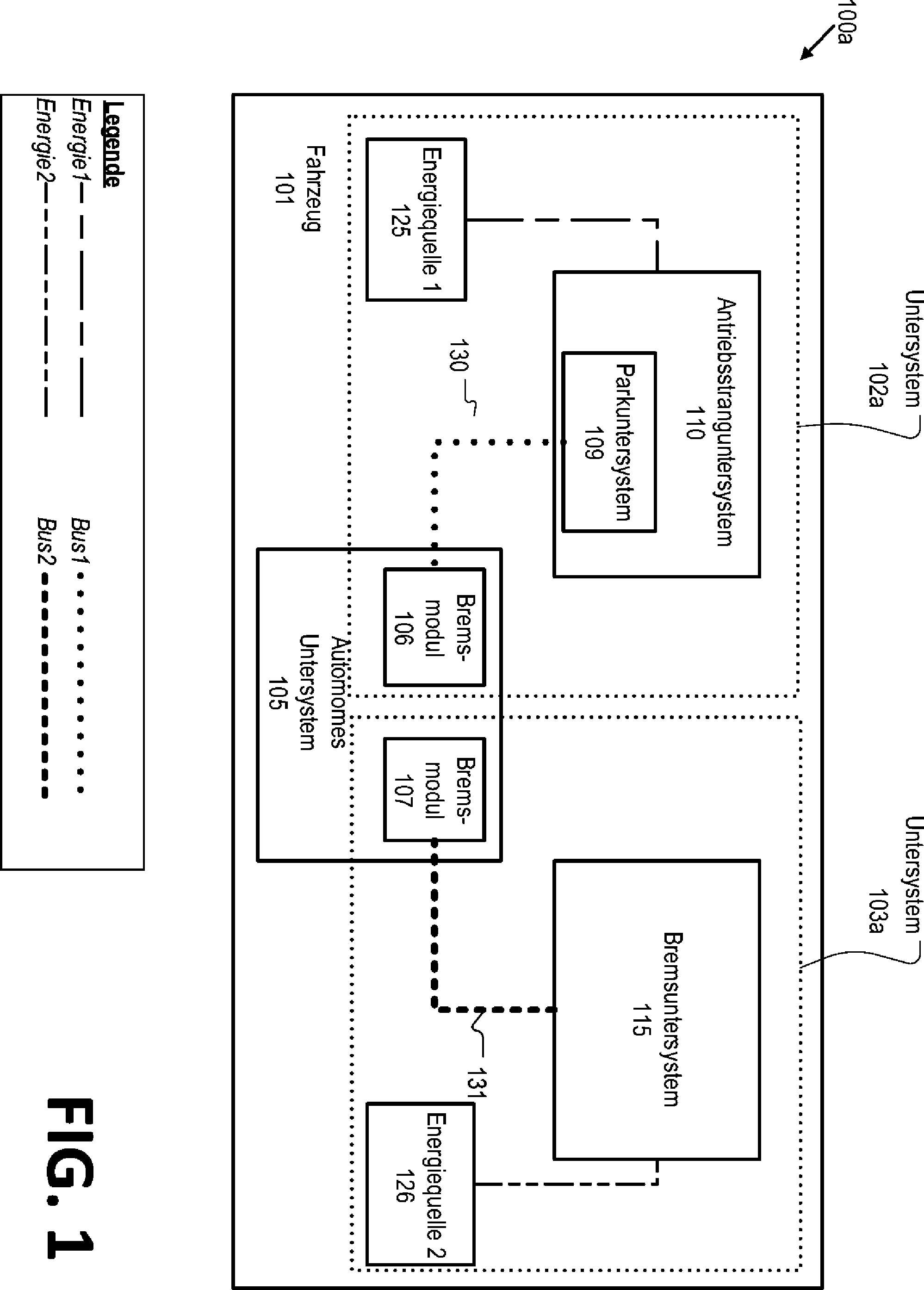
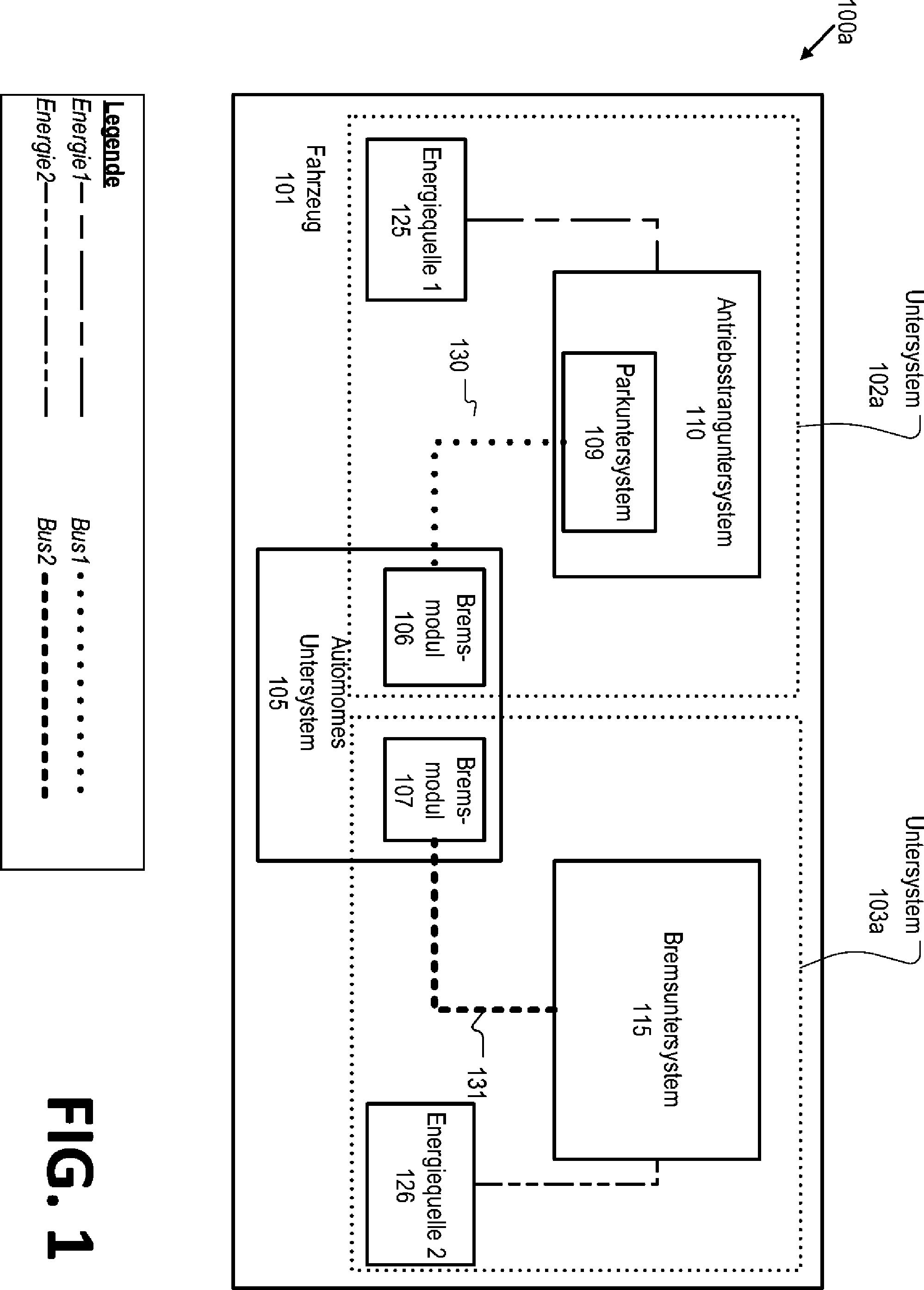
Diese Anmeldung beansprucht die Priorität der vorläufigen US-Patentanmeldung Nr 62/023,435 mit dem Titel „VEHICLE PARKING SYSTEM FAILURE MANAGEMENT“ (Fahrzeugparksystem-Ausfallmanagement), eingereicht am 11. Juli 2014, deren Inhalt hiermit durch Bezugnahme in ihrer Gesamtheit aufgenommen ist. Ein Fahrzeug, wie beispielsweise ein Automobil, hängt von zuverlässiger und ausfallsicherer Leistungsabgabe an verschiedene Fahrzeugkomponenten ab. Beispielsweise könnte ein Ausfall der Leistungsabgabe an oder Kommunikation mit einem oder mehreren Fahrzeugparkrückhaltemechanismen, z. B. Feststellbremse, Einlegen von Gängen in einem Fahrzeugantriebsstrang usw., einen Fahrzeugführer, andere Fahrzeuginsassen und/oder Personen außerhalb des Fahrzeugs in Gefahr bringen. Zuverlässige Parkmechanismen sind besonders wichtig im Falle eines autonomen Fahrzeugs, d. h. ein Fahrzeug, in dem einige oder alle Operationen, welche üblicherweise von einem menschlichen Fahrer gesteuert werden, von Komponenten im Fahrzeug ohne Eingriff des Fahrers gesteuert und durchgeführt werden. Leider weisen gegenwärtige Mechanismen Mängel hinsichtlich Erkennung und/oder Adressierung von Leistungs- und/oder Kommunikationsausfällen in Bezug auf Fahrzeugparkrückhaltemechanismen auf. Ein beispielhaftes System, welches solche Leistungs- und/oder Kommunikationsausfälle adressieren kann, umfasst ein autonomes Untersystem, das erste und zweite Bremsmodule umfasst, wobei jedes der Module einen Prozessor und einen Speicher umfasst, wobei der Speicher Anweisungen speichert, die vom Prozessor ausführbar sind, um einen Fehler zu erkennen. Das System umfasst ferner ein Parkuntersystem, welches programmiert ist, um einen Parkrückhaltemechanismus in einem Fahrzeugantriebsstrang in Reaktion auf ein Signal vom ersten Bremsmodul zu betätigen, ein Bremsuntersystem, welches programmiert ist, um einen Bremsmechanismus in Reaktion auf ein Signal vom zweiten Bremsmodul zu betätigen, eine erste Energiequelle, welche das Parkuntersystem und den Fahrzeugantriebsstrang mit Energie versorgt, und eine zweite Energiequelle, welche das Bremsuntersystem mit Energie versorgt. Das autonome Untersystem ist ferner programmiert, dass eines der Bremsmodule ein Signal bereitstellt, um einen vom Parkrückhaltemechanismus und Bremsmechanismus zu betätigen, abhängig davon, ob ein Fehler erkannt wird. Die gezeigten Elemente können viele verschiedene Formen annehmen und mehrere und/oder alternative Komponenten und Einrichtungen umfassen. Die veranschaulichten beispielhaften Komponenten sollen keine Beschränkung darstellen. Tatsächlich können zusätzliche oder alternative Komponenten und/oder Implementierungen verwendet werden. Das Untersystem 105 ist mit ersten und zweiten Energiequellen 125, 126 sowie ersten und zweiten Kommunikationsbussen 130, 131 verbunden, welche beispielhaft und nicht einschränkend für die Kommunikation als Controller Area Network(CAN)-Busse oder dergleichen ausgelegt sein können und/oder andere Kommunikationsmechanismen und/oder Protokolle verwenden können. Über die Busse 130, 131 und/oder andere verdrahtete und/oder drahtlose Mechanismen kann das autonome Untersystem 105, z. B. Module 106 und/oder 107 darin, Nachrichten an verschiedene Vorrichtungen oder Untersysteme in einem Fahrzeug 101 übertragen und/oder Nachrichten von den verschiedenen Vorrichtungen, z. B. Steuerungen, Aktuatoren, Sensoren usw., empfangen. Über die Busse 130, 131 ist das Untersystem 105 in Kommunikation mit verschiedenen Komponenten des Fahrzeugs 101, einschließlich der Module 106 und 107, welche jeweils auf einem der Busse 130, 131 mit einem Antriebsstranguntersystem 110 und einem Bremsuntersystem 115 sind. Jedes der Untersysteme 110, 115, wie das autonome Untersystem 105, umfasst eine Kombination von Software und Hardware, d. h. einen Prozessor, und einen Speicher, welcher Anweisungen speichert, die vom Prozessor ausführbar sind, um Operationen, einschließlich der hierin beschriebenen sowie anderer Operationen, durchzuführen. Beispielsweise ist das Antriebsstranguntersystem 110 im Allgemeinen programmiert, um Operationen zum Steuern des Antriebsstrangs eines Fahrzeugs 101 durchzuführen, das Bremsuntersystem 115 kann programmiert sein, um Operationen zum Steuern einer oder mehrerer Bremsen des Fahrzeugs 101, z. B. Feststellbremse, durchzuführen usw. Das Untersystem 105 umfasst, wie oben erwähnt, die ersten und zweiten Bremsmodule 106, 107. Die Bremsmodule 106, 107, welche manchmal als Failsafe-Vorrichtungen bezeichnet werden, sind jeweils eine Kombination aus Software und Hardware, die unabhängig vom Untersystem 105 und voneinander arbeiten können. Die Module 106, 107 sind jeweils programmiert, um einen Fehler oder Ausfall im Untersystem 105 sowie interne Fehler oder Ausfälle zu erkennen. Jedes der Module 106, 107 ist mit einem der Kommunikationsbusse 130, 131 verbunden, beispielsweise, wie in Das Antriebsstranguntersystem 110 umfasst ein oder ist kommunikativ gekoppelt mit einem Parkuntersystem 109, wobei das Untersystem 109 einen Prozessor und einen Speicher umfasst, so dass es in Bezug auf andere Untersysteme in einer hierin beschriebenen Weise programmierbar ist. Das Parkuntersystem 109 ist im Allgemeinen für das Empfangen von Eingabe, z. B. vom Modul 106, wie in Ferner ist das Modul 107 im Beispiel von Ein Merkmal des Beispiels aus Ferner umfasst im Beispiel von Die Module 107, 108 sind ferner durch wenigstens einen Arbitrierungsbus 135 verbunden. Ein „Arbitrierungsbus“ oder eine „Arbitrierung“ ist für die Zwecke dieser Offenbarung als Kommunikationsverbindung oder Link zwischen zwei Modulen im Untersystem eines Fahrzeugs 101 definiert, sowie die Programmierung in wenigstens einer der Vorrichtungen und/oder in einem Mikroprozessor des Busses 135 selbst, um Logik zu implementieren, um eine Aktion zu bestimmen, um einen Fehler oder Ausfall zu erkennen. Im Beispiel aus Der Arbitrierungsbus 135 könnte einen Fehler in oder in Verbindung mit einem der Module 107, 108 in einer Vielzahl von Wegen erkennen. Beispielsweise kann der Arbitrierungsbus 135 einen Fehler in oder in Verbindung mit einem der Busse 130, 131 in einer Vielzahl von Wegen erkennen. Beispielsweise kann der Bus 130 in einem Szenario ein primärer Kommunikationsbus sein, und der Bus 131 kann ein Backup- oder sekundärer Kommunikationsbus sein. In diesem Szenario könnte das Modul 108 einen Fehlercode oder desgleichen empfangen. Beispielsweise könnte ein Modul 108 dann seiner Gegenstückvorrichtung 107 über den Arbitrierungsbus 135 anzeigen, dass ein Fehler im Bus 130 existiert, worauf das autonome Untersystem 105 die Verwendung des primären Busses 130, für den der Fehler angezeigt wurde, einstellen und auf den anderen Bus 131 umschalten könnte. Ferner können die Module 107, 108 für die interne Fehlererkennung ausgelegt sein, z. B. könnten unabhängige Mikroprozessoren innerhalb eines Moduls 107 oder 108 verwendet werden, um Ergebnisse zu berechnen und zu vergleichen, um das Vorhandensein eines Fehlers zu bestimmen. Alternativ oder zusätzlich könnte ein Modul 107, 108 einen Fehlerzustand extern empfangen, z. B. über einen der Busse 130, 131. In jedem Fall könnte ein primäres Modul 108 nach dem Erkennen oder Bestimmen eines Fehlers beispielsweise über den Arbitrierungsbus 135 mit einem sekundären Modul 107 kommunizieren, um den Fehler anzuzeigen, worauf das sekundäre Modul 107 Operationen übernehmen könnte, welche bisher vom primären Modul 108durchgeführt wurden. Ferner könnte das sekundäre Modul 107 eine Nachricht an das autonome Untersystem 105 senden, welche den Fehlerzustand anzeigt und/oder dass Kommunikationen vom Untersystem 110 über den Bus 130 ignoriert werden sollten und Kommunikationen vom sekundären Bus 131 verwendet werden sollten. In jedem Fall kann im Beispiel aus Ferner könnten die Module 106, 107, ähnlich wie bei der Anordnung der Module 108, 107 im System 100c aus In einer Implementierung des Systems 100d könnte das Parkuntersystem 109 einen Fehler in einer ersten Fahrereingabevorrichtung 150 erkennen, z. B. einen Ausfall der Energiequelle 125, des Kommunikationsbusses 130 oder der Eingabevorrichtung 150. Nach dem Erkennen eines solchen Fehlers könnte das Parkuntersystem 109 ein Signal bereitstellen, um die zweite Eingabevorrichtung 151 zu aktivieren, welche dann dazu verwendet werden könnte, um eine Eingabe bereitzustellen, um eine Parkrückhaltung über das Parkuntersystem 109 zu aktivieren. Noch ferner könnte alternativ oder zusätzlich ein Fehler in einem oder beiden Eingabevorrichtungen 150, 151 von einem der Untersysteme 106, 107 erkannt oder an eines von ihnen kommuniziert werden. Nach dem Erkennen eines solchen Fehlers könnten eine oder beide der Untersysteme 106, 107 eine Anweisung an das Bremsuntersystem 115 über einen Bus 130, 131 bereitstellen, um einen Bremsmechanismus oder Bremsmechanismen in Verbindung mit einem oder mehreren Rädern des Fahrzeugs 101 zu betätigen. Falls in einem Block 510 nach dem Block 505 ein Fehler erkannt wird, geht der Prozess 500 weiter zu einem Block 515. Ansonsten geht der Prozess 500 weiter zu einem Block 520. Im Block 515 wird ein erkannter Fehler behoben, z. B. in einer oben beschriebenen Weise. Ferner ist ein mögliches Merkmal der verschiedenen oben erläuterten Ausführungsformen, dass das autonome Untersystem 105 im Falle eines Fehlers Parkfähigkeiten des Fahrzeugs 101 bestimmen könnte. Falls das Bremsen von Fahrzeug 101 beispielsweise für weniger als alle der Räder des Fahrzeugs 101 bereitgestellt werden kann, z. B. drei, zwei oder selbst ein Rad eines Fahrzeugs 101 mit vier Rädern, dann kann es Parkszenarien geben, welche für das Fahrzeug 101 ungeeignet sind. Beispielsweise sollte ein Fahrzeug 101 mit nur einem oder selbst zwei Rädern, die einem Bremsen unterliegen, nicht an einer steilen Steigung geparkt werden. Dementsprechend kann das autonome Modul 105 programmiert werden, um das Fahrzeug 101 für verfügbares Bremsen angemessen zu parken, d. h. in einer Situation, in der verfügbare Bremsen oder Stoppmechanismen das Fahrzeug zurückhalten. Wenn beispielsweise nur ein Rad gebremst werden kann, können nur im Wesentlichen flache Parkplätze als geeignet angesehen werden. Ähnlich können, falls ein Fahrzeug mit Ladung schwer beladen ist, nur im Wesentlichen flache Parkplätze akzeptabel sein, selbst wenn mehr als ein Rad gebremst werden kann. Nach einem der Blöcke 510, 515 wird in einem Block 520 bestimmt, ob der Prozess 500 fortgesetzt werden sollte. Beispielsweise falls der Prozess 500 enden kann, wenn ein Fahrzeug 101 ausgeschaltet ist. In jedem Fall, falls der Prozess 500 fortgesetzt wird, kehrt die Steuerung zum Block 505 zurück. Andernfalls endet das Verfahren 500. Der Prozess 500 könnte im autonomen Untersystem 105, Parkuntersystem 109 usw. und/oder einer Kombination solcher Untersysteme und/oder Module im Fahrzeug 101 ausgeführt werden. Ferner können die Untersysteme 105, 110, 115 usw. andere Module, Stromanschlüsse und Kommunikationsverbindungen umfassen, zusätzlich zu den in den Figuren gezeigten und hierin erläuterten. Beispielsweise kann das Antriebsstranguntersystem 110 insbesondere weitere Redundanz rechtfertigen und/oder alternative oder zusätzliche Failover-Optionen bereitstellen, wie beispielsweise einen „Coast-down“-Modus im Falle eines Versagens des Antriebsstranguntersystems 110. Darüber hinaus kann das autonome Untersystem 105 zusätzliche Module, Stromanschlüsse und Kommunikationsverbindungen zusätzlich zu den darin gezeigten umfassen. Rechenvorrichtungen wie diese, welche hierin erläutert werden, umfassen im Allgemeinen jeweils Anweisungen, die von einem oder mehreren Rechenvorrichtungen ausführbar sind, wie beispielsweise die oben identifizierten, und zum Ausführen von Blöcken oder Schritten der oben beschriebenen Prozesse. Beispielsweise können die oben erläuterten Prozessblöcke als computerausführbare Anweisungen ausgeführt werden. Computerausführbare Anweisungen können von Computerprogrammen kompiliert oder interpretiert werden, welche unter Verwendung einer Vielzahl von Programmiersprachen und/oder Technologien erstellt werden, einschließlich, ohne darauf beschränkt werden, und entweder allein oder in Kombination, JavaTM, C, C++, Visual Basic, Java Script, Perl, HTML usw. Im Allgemeinen empfängt ein Prozessor (z. B. ein Mikroprozessor) Anweisungen, z. B. von einem Speicher, einem computerlesbaren Medium usw., und führt diese Anweisungen aus, um dadurch einen oder mehrere Prozesse durchzuführen, einschließlich eines oder mehrerer der hierin beschriebenen Prozesse. Solche Anweisungen und andere Daten können unter Verwendung einer Vielzahl von computerlesbaren Medien gespeichert und übertragen werden. Eine Datei in einer Rechenvorrichtung ist im Allgemeinen eine Sammlung von Daten, welche auf einem computerlesbaren Medium gespeichert sind, wie beispielsweise ein Speichermedium, ein Direktzugriffsspeicher usw. Ein computerlesbares Medium umfasst ein beliebiges Medium, welches am Bereitstellen von Daten (z. B. Anweisungen), die von einem Computer gelesen werden können, beteiligt ist. Ein derartiges Medium kann viele Formen annehmen, einschließlich, aber nicht darauf beschränkt, nicht-flüchtiger Medien, flüchtiger Medien usw. Nicht-flüchtige Medien umfassen beispielsweise optische oder magnetische Platten und anderen persistenten Speicher. Flüchtige Medien umfassen dynamischen Direktzugriffsspeicher (Dynamic Random Access Memory, DRAM), welcher typischerweise einen Hauptspeicher bildet. Übliche Formen von computerlesbaren Medien umfassen beispielsweise eine Diskette, eine flexible Platte, eine Festplatte, ein Magnetband, jedes andere magnetische Medium, eine CD-ROM, DVD, jedes andere optische Medium, Lochkarten, Papierband, ein beliebiges anderes physisches Medium mit Lochmustern, ein RAM, ein PROM, ein EPROM, ein Flash-EEPROM, jeden anderen Speicherchip oder Kassette oder jedes andere Medium, von dem ein Computer lesen kann. In den Zeichnungen zeigen die gleichen Bezugszeichen die gleichen Elemente an. Ferner können einige oder alle dieser Elemente geändert werden. In Bezug auf die hierin beschriebenen Medien, Prozesse, Systeme, Methoden usw. sollte es verstanden werden, dass zwar die Schritte solcher Prozesse usw. beschrieben wurden, wie sie gemäß einer bestimmten geordneten Abfolge auftreten, dass solche Prozesse aber mit den beschriebenen Schritten auch in einer anderen Reihenfolge als der hierin beschriebenen Reihenfolge umgesetzt werden können. Es sollte ferner zu verstehen sein, dass bestimmte Schritte gleichzeitig durchgeführt werden könnten, dass andere Schritte hinzugefügt werden könnten oder hierin beschriebene bestimmte Schritte weggelassen werden könnten. Mit anderen Worten dienen die Prozessbeschreibungen hierin der Veranschaulichung bestimmter Ausführungsformen und sind in keinster Weise als Einschränkung der Ansprüche zu verstehen. Demententsprechend soll verstanden werden, dass die vorstehende Beschreibung nur als veranschaulichend und nicht einschränkend gedacht ist. Viele Ausführungsformen und Anwendungen außer den bereitgestellten Beispielen würden sich für Fachleute auf dem Gebiet aus dem Durchlesen der obigen Beschreibung ergeben. Der Schutzbereich sollte nicht unter Bezugnahme auf die obige Beschreibung bestimmt werden, sondern sollte stattdessen unter Bezugnahme auf die angefügten Ansprüche bestimmt werden, zusammen mit dem vollen Umfang von Äquivalenten, auf die derartige Ansprüche Anspruch haben. Es ist antizipiert und beabsichtigt, dass künftige Entwicklungen in den hierin erörterten Technologien erfolgen werden und dass die offenbarten Systeme und Verfahren in derartige künftige Ausführungsformen eingebunden werden. Zusammenfassend versteht es sich, dass die Erfindung modifiziert und verändert werden kann und lediglich durch die nachfolgenden Ansprüche beschränkt ist. Alle in den Ansprüchen verwendeten Begriffe sollen ihre gewöhnlichen Bedeutungen erhalten, wie für Fachleute auf dem Gebiet verstanden wird, sofern nicht hierin eine explizite gegenteilige Angabe gemacht wird. Insbesondere kann die Verwendung der Singularartikel, wie zum Beispiel „ein/e/er“, „der, die, das“, „besagte/r/s“ usw. als eines oder mehrere der aufgezeigten Elemente angeführt gelesen werden, es sei denn, ein Anspruch führt eine gegenteilige explizite Einschränkung an. Ein System umfasst ein autonomes Untersystem, welches erste und zweite Bremsmodule umfasst. Jedes der Module umfasst einen Prozessor und einen Speicher, wobei der Speicher Anweisungen speichert, welche vom Prozessor ausführbar sind, um einen Fehler zu erkennen. Das System umfasst ferner ein Bremsuntersystem, welches programmiert ist, um einen Bremsmechanismus in Reaktion auf ein Signal vom zweiten Bremsmodul zu betätigen. Das autonome Untersystem ist ferner programmiert, um eines der Bremsmodule auszuwählen, um dem Bremsmechanismus ein Signal bereitzustellen, abhängig davon, ob ein Fehler erkannt wird. System, umfassend ein autonomes Fahrzeugsteueruntersystem, umfassend: System nach Anspruch 1, wobei jedes der ersten und zweiten Module programmiert ist, um eine Anzeige des Fehlers von einem Kommunikationsbus zu empfangen, welcher wenigstens einen Teil aufweist, der extern zum autonomen Untersystem ist. System nach Anspruch 2, wobei jedes der ersten und zweiten Module programmiert ist, um eine Wake-up-Benachrichtigung von einem vom Kommunikationsbus und einem zweiten Kommunikationsbus zu empfangen. System nach Anspruch 2, wobei jedes der ersten und zweiten Module programmiert ist, um im Falle eines Ausfalls eines der Kommunikationsbusse eine Wake-up-Benachrichtigung an das andere der Module zu senden. System nach Anspruch 1, ferner umfassend erste und zweite unabhängige Energiequellen, wobei das erste Bremsmodul mit der ersten Energiequelle verbunden ist und programmiert ist, um Bremsen von wenigstens einem Rad des Fahrzeugs zu aktivieren, und das zweite Bremsmodul mit der zweiten Energiequelle verbunden ist und programmiert ist, um Bremsen von wenigstens einem Rad des Fahrzeugs zu aktivieren. System nach Anspruch 1, ferner umfassend ein Parkuntersystem, welches programmiert ist, um einen Parkrückhaltemechanismus in einem Fahrzeugantriebsstrang in Reaktion auf ein Signal vom ersten Bremsmodul zu betätigen. System nach Anspruch 6, ferner umfassend eine erste Energiequelle, welche das Parkuntersystem und den Fahrzeugantriebsstrang mit Energie versorgt, und eine zweite Energiequelle, welche das Bremsuntersystem mit Energie versorgt. System, umfassend ein autonomes Fahrzeugsteueruntersystem, umfassend: System nach Anspruch 8, wobei die zweite Energiequelle mit dem Parkuntersystem im Fahrzeugantriebsstrang verbunden ist und die erste Energiequelle mit dem Bremsuntersystem verbunden ist. System nach Anspruch 8 oder Anspruch 9, wobei jedes der ersten und zweiten Bremsmodule programmiert ist, um eine Anzeige des Fehlers von einem Kommunikationsbus zu empfangen, welcher wenigstens einen Teil aufweist, der extern zum autonomen Untersystem ist. System nach Anspruch 10, wobei jedes der ersten und zweiten Bremsmodule programmiert ist, um eine Wake-up-Benachrichtigung von einem vom Kommunikationsbus und einem zweiten Kommunikationsbus zu empfangen. System nach Anspruch 11, wobei jedes der ersten und zweiten Bremsmodule programmiert ist, um im Falle eines Ausfalls eines der Kommunikationsbusse eine Wake-up-Benachrichtigung an das andere der Bremsmodule zu senden. System nach einem der Ansprüche 8 bis 12, wobei das erste Bremsmodul mit der ersten Energiequelle verbunden ist und programmiert ist, um Bremsen von wenigstens einem Rad des Fahrzeugs zu aktivieren, und das zweite Bremsmodul mit der zweiten Energiequelle verbunden ist und programmiert ist, um Bremsen von wenigstens einem Rad des Fahrzeugs zu aktivieren. Verfahren, umfassend: Verfahren nach Anspruch 14, ferner umfassend das Bestimmen, ob ein Parkszenario für das Fahrzeug basierend auf dem Fehler angemessen ist. Verfahren nach Anspruch 15, wobei das Bestimmen, ob ein Parkszenario für das Fahrzeug angemessen ist, wenigstens eines des Bestimmens einer Steigung in Verbindung mit dem Parkszenario und eines Ladegewichts des Fahrzeugs umfasst. Verfahren nach Anspruch 15, ferner umfassend das Empfangen eines Signals von einem Bremsmodul, falls der Fehler erkannt wird und falls das Parkszenario angemessen ist. Verfahren nach einem der Ansprüche 14 bis 17, ferner umfassend das Betätigen eines Parkrückhaltemechanismus in einem Fahrzeugantriebsstrang. Verfahren nach Anspruch 18, wobei der Parkrückhaltemechanismus in Reaktion auf das Empfangen des Signals vom Bremsmodul betätigt wird. QUERVERWEIS AUF VERWANDTE ANMELDUNGEN
HINTERGRUND
KURZE BESCHREIBUNG DER ZEICHNUNGEN
DETAILLIERTE BESCHREIBUNG
ein autonomes Untersystem, welches erste und zweite Bremsmodule umfasst, wobei jedes der Module einen Prozessor und einen Speicher umfasst, wobei der Speicher Anweisungen speichert, welche vom Prozessor ausführbar sind, um einen Fehler zu erkennen; und
ein Bremsuntersystem, welches programmiert ist, um einen Bremsmechanismus in Reaktion auf ein Signal vom zweiten Bremsmodul zu betätigen;
wobei das autonome Untersystem ferner programmiert ist, um eines der Bremsmodule auszuwählen, um dem Bremsmechanismus ein Signal bereitzustellen, abhängig davon, ob ein Fehler erkannt wird.
ein autonomes Untersystem, welches erste und zweite Bremsmodule umfasst, wobei jedes der Module einen Prozessor und einen Speicher umfasst, wobei der Speicher Anweisungen speichert, welche vom Prozessor ausführbar sind, um einen Fehler zu erkennen;
ein Parkuntersystem, welches programmiert ist, um einen Parkrückhaltemechanismus in einem Fahrzeugantriebsstrang in Reaktion auf ein Signal vom ersten Bremsmodul zu betätigen;
ein Bremsuntersystem, welches programmiert ist, um einen Bremsmechanismus in Reaktion auf ein Signal vom zweiten Bremsmodul zu betätigen; und
eine erste Energiequelle, welche das Parkuntersystem und den Fahrzeugantriebsstrang mit Energie versorgt, und eine zweite Energiequelle, welche das Bremsuntersystem mit Energie versorgt,
wobei das autonome Untersystem ferner programmiert ist, dass eines der Bremsmodule ein Signal bereitstellt, um einen vom Parkrückhaltemechanismus und Bremsmechanismus zu betätigen, abhängig davon, ob ein Fehler erkannt wird.
Überwachen mittels eines Moduls in einem Fahrzeuguntersystem, um einen Fehler zu erkennen; und
nach dem Erkennen eines Fehlers Durchführen wenigstens eines des Sendens einer Kommunikation in Bezug auf den Fehler und des Übertragens der Operation des Fahrzeuguntersystems an das oder vom Modul.