DRIVING GUIDANCE SYSTEM OF MAGNETIC SELF-DRIVING VEHICLE
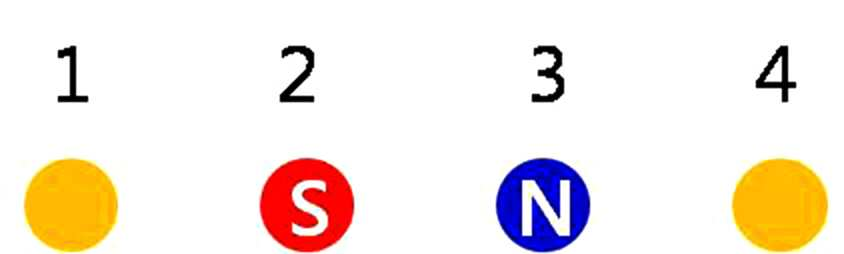
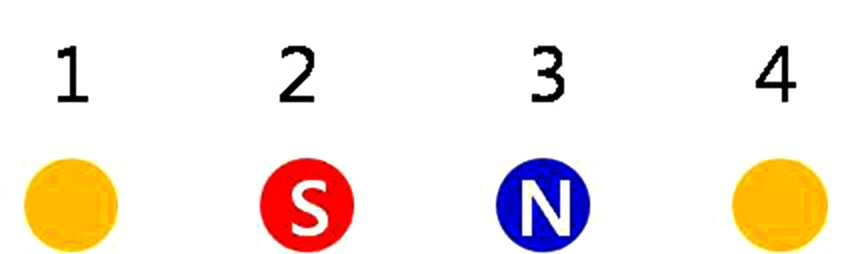
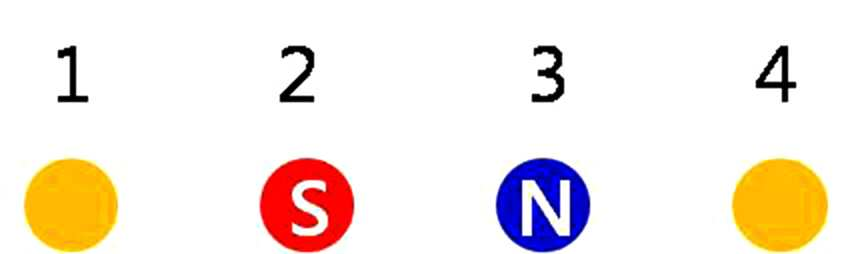
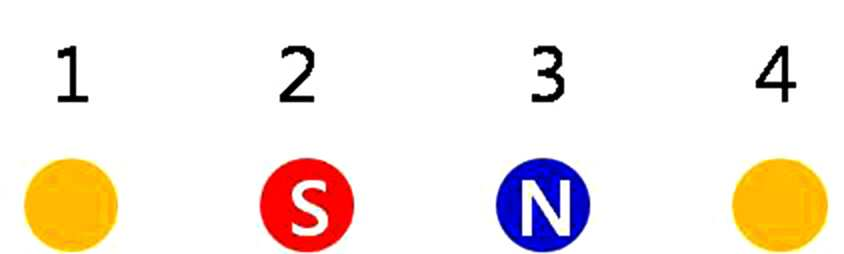
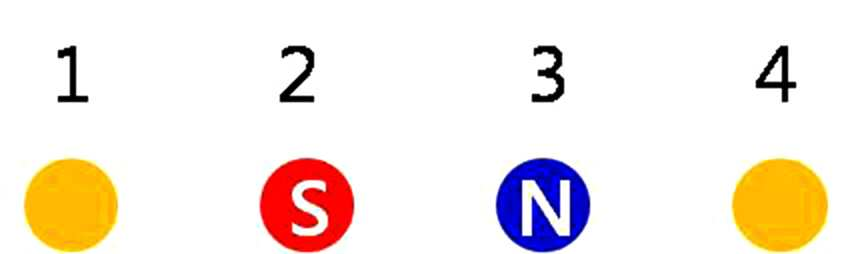
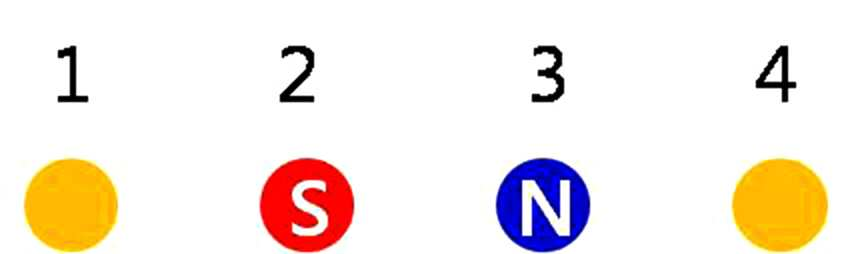
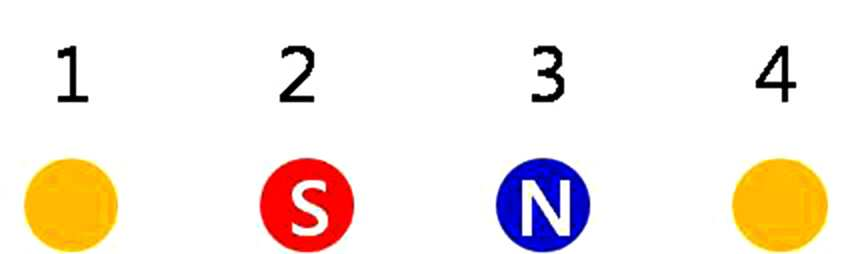
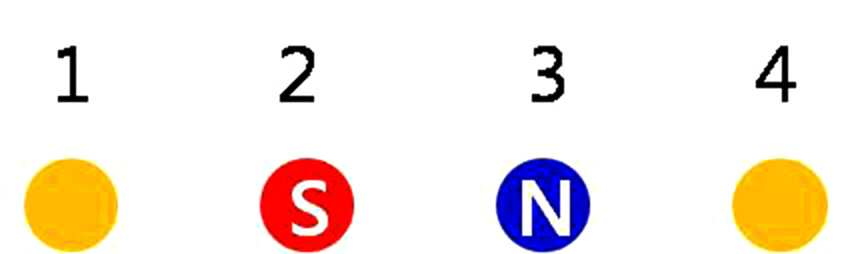
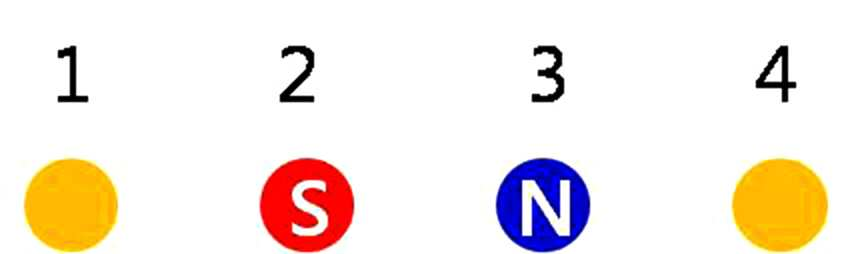
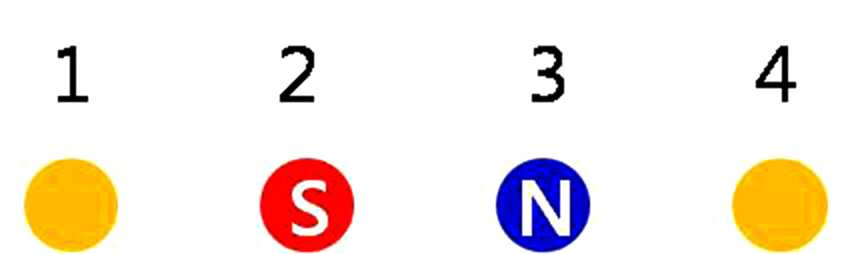
The present invention refers to magnetic field based unmanned end of traveling guide system relates to, in particular, for obtaining a magnetic field road by traveling to a guiding system are disclosed. Recently, techniques have improved safety due to and driver's convenience of number of vehicle technology electronic number supplies various functionalities can be added to a vehicle and neat, among operational range without driver driving unit automatically recognize an unmanned vehicle running on the road condition than the aluminum etc. studies. Generally magnetic field based unmanned vehicle running on the shaft by the skill level of the plate to allow a vehicle driver controls the direction of travel can be correlated with and increase the stability. Further, due to driver does not drunk driving, driver can be such as to reduce the risk of violent operation 310. However, in this case, door-to decide whether to actively determine active in situations where there is a lack active traffic can be traffic information by the pin is that it door number point determination. In order to solve said prior art door number point such as, in the embodiment of the present invention is unmanned vehicle running on one communicating information broadcast receiver number under public affairsunder public affairs at both sides guide number. According to one aspect of the present invention to solve for and number as above, magnetic field based wireless vehicle running on ball number traveling guide system is encoded. For puncturing said magnetic field based wireless vehicle running on the road traveling guide system that is created perforations, said perforations to be inserted information generating member, and said inserting member in order to lock the impact said information generating member generating road information created with having a predetermined wavelength. The, said perforations, and the lower end of the burr hole number 1 created by excavating a predetermined depth road burr hole said number 1 can be created comprising a predetermined depth drilling burr hole number 2. , the burr hole said number 2, burr hole with a width narrower than said number 1 can be drilled in a disclosed. , the burr hole said number 2, said number 1 to have constant diameter burr hole center axis can be drilled in a disclosed. The, said information generating member, can be inserted into the burr hole said number 1. The, said information generating member, can be magnets or RFID. The, said fixing member, said information generating member can be piercing. The, said fixing member can be inserted into said information generating members in burr hole said number 2. The, said road information generation section generates, can contain at least two. The, said road information generation section generates, receives road information, received information can be transmitted. The, said road information is, displayed as code can be transmitted. , the traveling guide system said, four said generator generates the road information can be. The, said four road information generation section generates, number 1 and number 4 road information generation section generates said information generating member consisting of a RFID, number 2 and number 3 road information generation section generates said information generating member can be comprised of a magnet. The, said number 1 and number 4 road information generation unit is installed on the range, range can be installed between said number 2 and number 3 road information generation unit. The, road information generation section generates said number 2 and number 3, the different poles facing toward the burr hole to said number 2 can be. The, said road information generation section generates, said road can be spaced at a distance from the branch point. In the embodiment according to one of the present invention traveling guide system is installed in between running unmanned vehicle running on magnetic field based unmanned vehicle running and equal to or less. Further, in the embodiment according to one embodiment of the present invention between the unmanned vehicle running on magnetic field based unmanned running vehicle traveling guide system capable of transmitting information to equal to or less than. In the embodiment of the present invention Figure 1 shows a traveling guide system also by one step of indicating information generation section are disclosed. In the embodiment according to Figure 2 shows a magnetic field based unmanned vehicle running on one of the present invention also traveling guide system in transmitting road information indicating one example of code are disclosed. Figure 3 shows a traveling guide system of the present invention also one in the embodiment according to magnetic field that indicates an order in order based unmanned vehicle running on roadway are disclosed. Also in the embodiment according to Figure 4 shows a magnetic field of the present invention for a traveling guide system to install based unmanned vehicle running on one) side view road perforation, b) information generating device for puncturing a axial side view, c) information generating device of plane view, d) traveling guide system of plane view, and e) side of the traveling guide system are disclosed. Figure 5 shows a traveling guide system of the present invention also one in the embodiment according to magnetic field based unmanned vehicle running on a traveling magnetic field based unmanned vehicle running on indicating the roadway are disclosed. Figure 6 shows a of the present invention also one in the embodiment according to a) magnetic field based unmanned vehicle running on the traveling guide system is installed in a magnetic field based traveling route b) magnetic field based unmanned vehicle running on indicating the traveling guide system is installed in a magnetic field based traveling path are disclosed. Hereinafter, with reference to a drawing of the present invention in the embodiment for the present invention in the preface is provided to the person with skill in the art for detailed embodiment is hereinafter to 2000. The present invention refers to several different taught herein can be embodied in the form of a in the embodiment is not limited to. In the present invention is described that is independent portion drawing unambiguously account for dispensed when the, same or similar component are identical in area to specification reference code is configured to receive. Figure 1 shows a traveling guide system of the present invention indicating one in the embodiment according to magnetic field based unmanned vehicle running also are disclosed. The reference also 1, in the embodiment according to magnetic field based unmanned vehicle running on one of the present invention traveling guide system (100) is RFID (110) and a magnet (130) consists of including. Magnetic field based unmanned running vehicle traveling guide system (100) during which a vehicle travels unmanned traveling magnetic field is based, at least one of presence information to a route number under public affairs substrate. The ball number which branch road road information is, confluence point, branch end, end confluence point, single road starting point, the branch point, be a traffic condition information necessary for driving. RFID (110) includes a traveling guide system (100) both terminals force is removed. RFID (110) can be is desired information, receives information from outside the device identification information can be generated. The, RFID (110) is desirably running magnetic field based unmanned vehicle running and information can receive and disclosed. Magnet (130) is traveling guide system (100) capacity amount of RFID (110) between the force is removed. Magnet (130) underground toward one pole, facing toward the other pole can be ground. Magnet (130) facing the ground polarity information using a number under public affairs substrate. The, magnet (130) capable of changing the polarity can be designed. On the other hand, in the embodiment of the present invention in one magnetic field based unmanned running vehicle traveling guide system (100) is RFID (110) and a magnet (130) having two described but, not limited to the, it is magnetic field based unmanned running vehicle traveling guide system (100) is RFID (110) agent (130) comprising at least one can be. In the embodiment according to Figure 2 shows a magnetic field based unmanned vehicle running on one of the present invention also traveling guide system in transmitting road information indicating one example of code are disclosed. Magnetic field based unmanned running vehicle traveling guide system (100) is preferably displayed as a route code transmission and other. The, in the embodiment of the present invention one least two RFID (110) and two magnets (130) can be transmitted using road information. RFID (110) and a magnet (130) can be represented by code for each displayed as 0 and 1. The simplest method as RFID (110) is represented by 0 and transmit signal number 1, number 2 transmit signal 1 can be represented. Magnet (130) toward the ground when the S pole can be represented 0, N pole toward the ground when 1 can be represented. Two RFID (110) and two magnets (130) of the present invention consisting of one in the embodiment according to magnetic field based unmanned running vehicle traveling guide system (100) can be constructed of road information code 16 may have. In one example, number 1 RFID signal is transmitted is number 1, number 1 and number 2 magnet pole and S pole facing the ground, is number 2 number 2 RFID transmit signal, magnetic field based unmanned running vehicle traveling guide system (100) and has a road information code is displayed as can be presented as a code 0001. This is also shown in command to In 2, determines that a road is present running road can be obtained. In another example, the number 1 and number 2 RFID number 1 signal is transmitted, the magnet is S pole number 1, number 2 when N pole magnets, magnetic field based unmanned running vehicle traveling guide system (100) and has a road information code is displayed as can be shown as a code 0100. This is also shown in command to Stop 2, magnetic field based unmanned vehicle running can be stopping. On the other hand, magnetic field based unmanned running vehicle traveling guide system (100) is RFID (110) agent (130) when the fails, transmitting error code displayed as can be. In one example, magnet (130) is the event of a failure, RFID (110) without sending code is displayed as, a route including an emergency code by sending out magnet (130) and road information request continues to be failure of informing. On the contrary RFID (110) the target value, magnet (130) is a route through the user's settings including an emergency code by sending out RFID (110) continues to be road information and failure of notification request. Figure 3 shows a traveling guide system of the present invention also one in the embodiment according to magnetic field based unmanned vehicle running on roadway and that indicates an order in order, one in the embodiment according to Figure 4 of the present invention traveling guide system for mounting a magnetic field based unmanned vehicle running on a) road perforation side view, b) information generating device for puncturing a axial side view, c) information generating device of plane view, d) plane view of traveling guide system, and e) side of the traveling guide system are disclosed. The reference also 3, magnetic field based unmanned running vehicle traveling guide system (100) are provided on the order road (300) is, creating a burr hole punched road (S310), (S320) information generating device into the burr hole, inserting the connection member (S330) without using a tool. First, road is defined (step S310) burr hole punched. The, such as the burr hole number 1 and number 2 4a also burr hole produced can be burr hole comprising. Number 1 number 2 burr hole and burr hole are either cylindrically share, wider than a burr hole is engaged with the burr hole number 2 number 1 are disclosed. Further, burr hole is deeper than can be engaged with the burr hole number 1 number 2. Next, a (step S320) is inserted into a burr hole information generating device. The 4b also reference, the enter information generating device are the same size drilling burr hole number 1. The, width of size information generating device, be a width and height. Since burr hole number 1 is inserted information generating device and similar to external impact and prevent shaking can be combined with the burr hole number 1. The, information generating device of the present invention is one in the embodiment according to magnetic field based unmanned vehicle running on RFID be a traveling guide system in and a magnet. Also, information generating device also includes a burr hole number 2 as shown in 4c by a uniform diameter equal to ST can be present. Finally, a fastening member is inserted into a (step S330). The reference also 4d, securing members inserted into the burr hole number 1 device generating information to more firmly fixed are associated with them. Securing members 4e also formed as information generating device shown in the axis of the burr hole and connected to the number 2 by combining information generating device can be rigidly fixed on the road. The, securing members preferably screw can be using. Figure 5 shows a traveling guide system of the present invention also one in the embodiment according to magnetic field based unmanned vehicle running on a traveling magnetic field based unmanned vehicle running on indicating the roadway are disclosed. In the embodiment according to magnetic field based unmanned vehicle running on one of the present invention traveling guide system (100) of the traveling information need position force is removed. The, traveling information need be a position which the one example of a branch point. The reference also 5, in which a vehicle travels based unmanned traveling magnetic field, the magnetic field is a branch point appearing in the unmanned vehicle running on road or road driving and road based exiting as present two selection. The, in order to exit road speed and deceleration needs disclosed. However, if not needed without being decelerated to exit road travel since the speed of the fluid not exiting back to be unmanned vehicle running on road based magnetic field magnetic field based unmanned vehicle running speed can control signal. As a result, the distance between the contact protrusion running vehicle can be accident. The, branch bifurcation appearing before appearing at a location spaced apart by a distance from a branch point that when obtaining road information, deceleration can be completed through the same. Figure 6 shows a of the present invention also one in the embodiment according to a) magnetic field based unmanned vehicle running on the traveling guide system is installed in a magnetic field based traveling route b) magnetic field based unmanned vehicle running on indicating the traveling guide system is installed in a magnetic field based traveling path are disclosed. Also as shown in 6a, road is used paths diverged received at the time. The, a route does not fully capture increased risk of accident. Thus, as shown in 6b during traveling paths diverged up also when, at a location spaced apart a distance when a route number under public affairs, magnetic field based unmanned vehicle running on road information acquiring unit may be speed, traffic grasping may be filled. In the embodiment of the present invention is described but one above, in one embodiment of the present invention to non-specification number which idea is the example number correspondingly, for understanding of the present invention one skilled filamentous within the range of the same idea, detected in, change, number and back, by means of further other embodiment hereinafter-in number for example to be able to or, in addition of the present invention that is carried in the on political of fender will. 100: magnetic field based unmanned running vehicle traveling guide system 110: RFID 130: magnet A driving guidance system of a magnetic self-driving vehicle is provided. According to an embodiment of the present invention, the driving guidance system of a magnetic self-driving vehicle comprises: a punch unit generated by punching a road; an information generation member inserted in the punch unit; and a road information generation unit generated with a fixation member inserted to fixate the information generation member in the punch unit. COPYRIGHT KIPO 2017 For puncturing road created perforations, said perforations to be inserted information generating member, and said inserting member in order to lock the impact said information generating member including magnetic field created with road information generating part based wireless traveling vehicle traveling guide system. According to Claim 1, said perforations, a predetermined depth created by the lower end of the burr hole and said number 1 number 1 road excavating a predetermined depth drilling burr hole number 2 that is created including a burr hole running vehicle based wireless magnetic field traveling guide system. According to Claim 2, the burr hole said number 2, perforated burr hole with a width narrower than said number 1 magnetic field based wireless traveling vehicle traveling guide system. According to Claim 3, the burr hole said number 2, said number 1 to have constant diameter perforated burr hole center axis magnetic field based wireless traveling vehicle traveling guide system. According to Claim 2, said information generating member, burr hole inserted into said number 1 magnetic based wireless traveling vehicle traveling guide system. According to Claim 5, said information generating member, including RFID or magnet magnetic field based wireless traveling vehicle traveling guide system. According to Claim 2, said fixing member, said information generating member for piercing the magnetic based wireless traveling vehicle traveling guide system. According to Claim 7, said fixing member is inserted into the burr hole said number 2 members information generating said magnetic field based wireless traveling vehicle traveling guide system. According to Claim 8, said road information generation section generates, including at least two magnetic field based wireless traveling vehicle traveling guide system. According to Claim 9, said road information generation section generates, receives road information, received information transmitting magnetic field based wireless traveling vehicle traveling guide system. According to Claim 10, said road information is, displayed as code performs the magnetic field based wireless traveling vehicle traveling guide system. According to Claim 11, said traveling guide system is, four said road information generating part including magnetic field based wireless traveling vehicle traveling guide system. According to Claim 12, said four road information generation section generates, number 1 and number 4 road information generation section generates said information generating member consisting of a RFID, number 2 and number 3 road information generation section generates said information generating member configured magnet magnetic field based wireless traveling vehicle traveling guide system. According to Claim 13, said number 1 and number 4 road information generation unit is installed on the range, said number 2 and number 3 road information generation unit which is placed between the magnetic field range-based wireless traveling vehicle traveling guide system. According to Claim 14, road information generation section generates said number 2 and number 3, different poles facing toward the magnetic based wireless vehicle running on a burr hole said number 2 is traveling guide system. According to Claim 15, said road information generation section generates, at a distance from the branch point is spaced magnetic field based wireless vehicle running on said road traveling guide system.