Сиденье с квазинулевой жесткостью
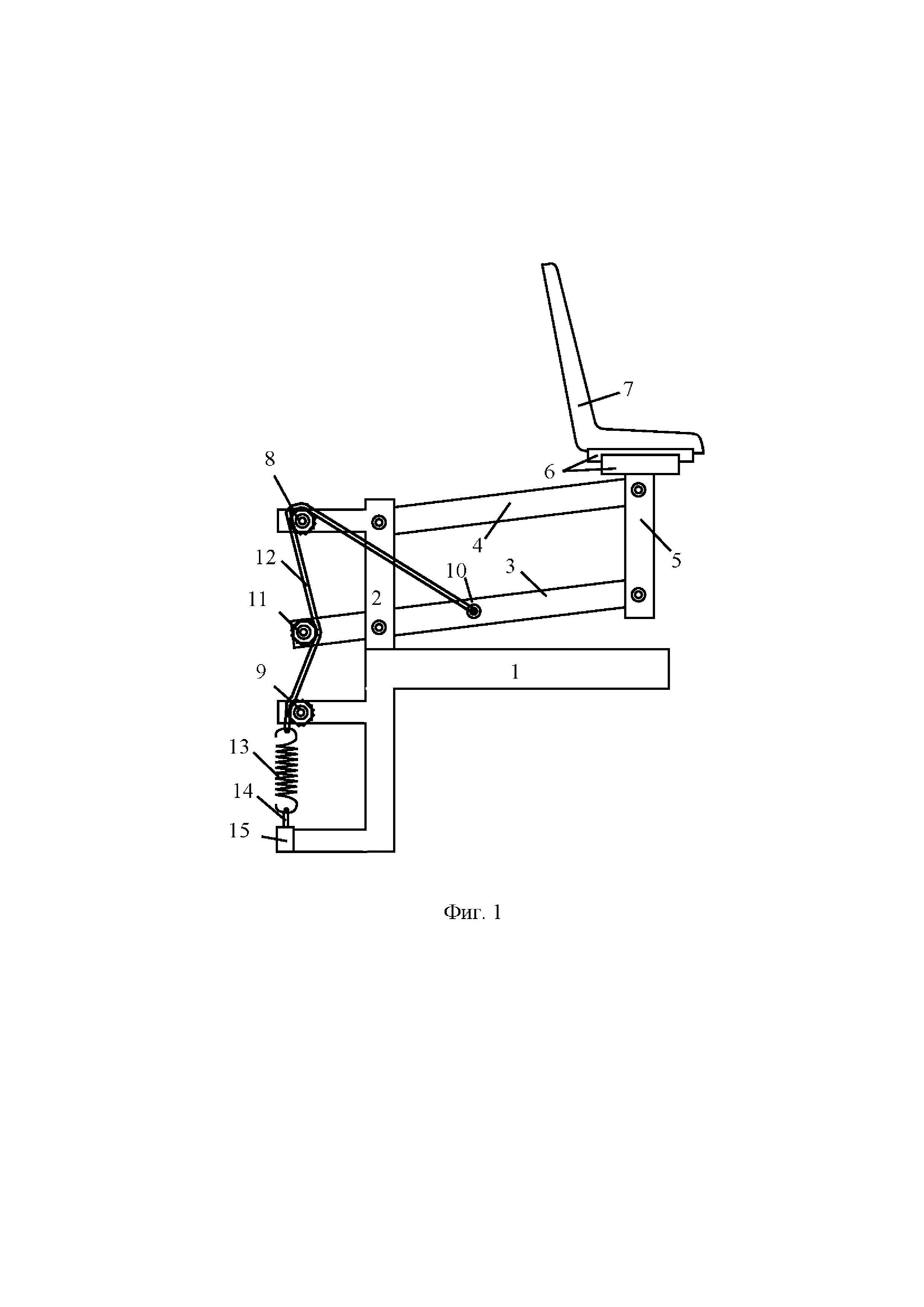
Полезная модель относится к подвескам сидений для транспортных средств и рабочих мест операторов строительных, дорожных, подъемно-транспортных и других машин, а также технологического оборудования. Известна виброзащитная система для сиденья оператора [RU 94008130, 09.10.1996], состоящая из механизма стабилизации крена, подушки со спинкой, направляющего механизма параллелограммного типа и упругого элемента, состоящего из набора тарельчатых пружин. Недостатками данной системы являются отсутствие возможности реализовывать режим квазинулевой жесткости при вертикальных колебаниях сиденья и без ударов ограничивать вертикальные перемещения подвески при выходе за границы допустимых перемещений. Известна виброзащитная система сиденья [SU 1081024, 23.03.1984], содержащая подвижное основание, направляющий механизм параллелограммного типа, пружину, механизм стабилизации крена, сиденье. Недостатками данной системы являются отсутствие возможности реализовывать режим квазинулевой жесткости при вертикальных колебаниях сиденья и без ударов ограничивать вертикальные перемещения сиденья относительно основания при выходе за границы допустимых перемещений. Известна виброзащитная система сиденья оператора [RU 206711, 23.09.2021], содержащая подвижное основание, направляющий механизм параллелограммного типа, пружину, механизм стабилизации крена, сиденье, механизм регулировки растяжения пружины, гибкий малорастяжимый трос, вращающиеся ролики. Недостатками данной системы является большие габариты конструкции, за счет того, что пружина расположена за подвеской сиденья, что создает определенные неудобства в компоновке кабины и самого сиденья. Наиболее близкой по своей технической сущности и достигаемому техническому эффекту к предлагаемой полезной модели является виброзащитное сиденье человека-оператора [RU 209204, 07.02.2022], содержащее подвижное основание, направляющий механизм параллелограммного типа, пружину, механизм стабилизации крена, сиденье, механизм регулировки растяжения пружины, гибкий малорастяжимый трос, вращающиеся ролики. Недостатками данной системы является большие габариты конструкции за счет того, что пружина расположена за подвеской сиденья, что создает определенные неудобства в компоновке кабины и самого сиденья. Задачей полезной модели является создание сиденья с квазинулевой жесткостью оператора мобильной машины, имеющей возможности: реализовывать режим квазинулевой жесткости (обеспечивающий более широкий частотный диапазон виброзащиты по сравнению с линейными виброизоляторами и более эффективную виброзащиту от низкочастотных колебаний) при вертикальных колебаниях сиденья оператора и без ударов ограничивать вертикальные перемещения сиденья относительно основания при выходе за границы зоны квазинулевой жесткости. При этом достигаются следующие технические результаты: 1) возможность реализовывать режим квазинулевой жесткости при вертикальных колебаниях сиденья оператора; 2) возможность без ударов ограничивать вертикальные перемещения сиденья относительно основания при выходе за границы зоны квазинулевой жесткости; 3) сократить габаритные размеры виброзащитного механизма, сделать его более компактным для размещения в кабине машины. Преимуществом предлагаемого решения является вертикальное расположение пружины растяжения за сиденьем человека-оператора и наличие одного ролика торможения, что существенно упрощает конструкцию устройства и уменьшает ее габариты. Указанные технические результаты достигаются за счет того, что сиденье с квазинулевой жесткостью содержит основание (кабину оператора), шарнирно сочлененный четырехзвенный направляющий механизм параллелограммного типа, нижнее поворотное звено которого выполнено в виде рычага первого рода, на одном из его плеч установлен тормозной ролик, который при подъеме (опускании) сиденья на величину, превышающую зону квазинулевой жесткости, вступает в контакт с тросом и дополнительно натягивает его, растягивая пружину, а на втором плече с помощью болта закреплен один конец гибкого нерастяжимого троса, механизм стабилизации крена, сиденье, пружину растяжения, механизм регулировки растяжения пружины, гибкий нерастяжимый трос, соединяющий пружину и нижнее звено параллелограммного механизма, два направляющих ролика для троса, ось одного из которых закреплена на неподвижном звене параллелограммного механизма, ось второго закреплена на неподвижном основании. Полезная модель поясняется прилагаемым чертежом и нижеследующим описанием, где на фигуре 1 приведен вид сбоку сиденья с квазинулевой жесткостью. Устройство включает в себя основание 1, жестко прикрепленное к кабине оператора. На основании 1 жестко закреплено неподвижное звено 2 параллелограммного механизма, на котором шарнирно закреплены нижнее звено 3 и верхнее звено 4 параллелограммного механизма. Нижнее звено 3 выполнено в виде рычага первого рода, на одном из плеч которого установлен ролик торможения 11, а на втором плече с помощью болта 10 закреплен один конец гибкого нерастяжимого троса 12. Ко второму плечу звена 3 и к звену 4 шарнирно прикреплено подвижное звено 5 параллелограммного механизма, на котором жестко закреплен механизм стабилизации крена 6. На механизм стабилизации крена 6 установлено сиденье 7. На неподвижном звене 2 шарнирно установлен вращающийся направляющий ролик 8, на основании 1 шарнирно установлен вращающийся направляющий ролик 9. На основании 1 жестко закреплен механизм 15 регулировки растяжения пружины со штоком 14, к которому прикреплен неподвижный конец пружины растяжения 13. Подвижный конец пружины растяжения 13 соединен со вторым концом гибкого нерастяжимого троса 12. При этом трос 12 огибает и опирается на направляющие ролики 8 и 9. Сиденье с квазинулевой жесткостью работает следующим образом. Горизонтальные вибрации, передаваемые на сиденье оператора 7, гасятся механизмом стабилизации крена 6. Изменение вертикальной силы, для подстройки устройства к различной массе оператора, осуществляется механизмом 15 регулировки растяжения пружины 13 за счет втягивания или выдвижения штока 14. Вертикальные вибрации, передаваемые на сиденье оператора 7, гасятся за счет вертикальных перемещений подвижного звена 5 параллелограммного механизма с механизмом 6 и сиденьем 7. Подъем (опускание) сиденья 7, звена 5 приводит к повороту нижнего и верхнего звеньев 3 и 4 параллелограммного механизма, что приводит к изменению расстояния между роликом 8 и болтом 10, за счет чего изменяется сила натяжения троса 12, пружина 13 сжимается (растягивается). Направляющий ролик 9 предотвращает нежелательный изгиб пружины 13. Таким образом, уравновешиваются две вертикальные разнонаправленные силы, возникающие на сиденье оператора 7 и создаваемые пружиной 13. Трос 12 в процессе работы может занимать два положения относительно ролика торможения 11, расположенного на нижнем звене 3 параллелограммного механизма: 1) Не касаться ролика торможения 11, расположенного на нижнем звене 3 параллелограммного механизма. В этом случае обеспечивается режим квазинулевой жесткости, выражающийся в том, что вертикальные силы, действующие со стороны сиденья 7 и со стороны параллелограммного механизма, компенсируют друг друга. 2) При подъеме (опускании) сиденья 7 на величину, превышающую зону квазинулевой жесткости, тормозной ролик 11 вступает в контакт с тросом 12 и дополнительно натягивает его, растягивая пружину 13. При уменьшении силы веса на сидении 7, действующей вертикально сверху вниз, сиденье 7 начнет подниматься, нижнее звено 3 параллелограммного механизма начинает поворачиваться против часовой стрелки, угол поворота между звеньями 2 и 3 уменьшается, расстояние между роликом 8 и болтом 10 уменьшается, пружина 13 сжимается, создаваемая пружиной 13 вертикальная сила уменьшается и уравновешивает силу веса сиденья 7 с оператором. Дальнейший подъем сиденья 7 приводит к тому, что трос 12 вступает в контакт с тормозным роликом 11 и начинает его огибать, происходит натяжение троса 12, который начинает растягивать пружину 13 и плавно тормозить дальнейший подъем сиденья 7 вплоть до полной остановки сиденья 7. Торможение происходит плавно без ударов. При повышении силы веса на сидении 7, действующей вертикально сверху вниз, сиденье 7 начинает опускаться, нижнее звено 3 параллелограммного механизма начинает поворачиваться по часовой стрелке, угол поворота между звеньями 2 и 3 увеличивается, расстояние между роликом 8 и болтом 10 увеличивается, пружина 13 растягивается, создаваемая пружиной 13 вертикальная сила увеличивается и уравновешивает силу веса сиденья 7 с оператором. Дальнейшее опускание сиденья 7 приводит к тому, что трос 12 вступает в контакт с тормозным роликом 11 и начинает его огибать, происходит дальнейшее натяжение троса 12, который продолжает растягивать пружину 13 и плавно тормозить дальнейшее опускание сиденья 7 вплоть до полной остановки сиденья 7. Торможение происходит плавно, без ударов. При выходе за границы средней области вертикальных перемещений сиденья 7, соответствующей зоне квазинулевой жесткости, происходит плавное увеличение вертикальной силы, действующей на сиденье 7 со стороны параллелограммного механизма, заставляющее сиденье 7 возвращаться в зону квазинулевой жесткости. Использование новых элементов: нижнего звена 3, выполненного в виде рычага первого рода, на одном плече которого закреплен тормозной ролик 11, а ко второму плечу которого с помощью болта 10 прикреплен один конец гибкого нерастяжимого троса 12, обеспечивает возможность реализовывать режим квазинулевой жесткости при вертикальных колебаниях сиденья оператора 7, а также возможность без ударов ограничивать вертикальные перемещения сиденья 7 относительно основания 1 при выходе за границы зоны квазинулевой жесткости. Предлагаемая полезная модель – сиденье с квазинулевой жесткостью, может быть изготовлена промышленным способом из серийно выпускаемых узлов и агрегатов. Полезная модель относится к области машиностроения и может использоваться в качестве подвески сиденья для транспортных средств и рабочих мест операторов строительных, дорожных, подъемно-транспортных и других машин, а также технологического оборудования. Сиденье с квазинулевой жесткостью включает основание, направляющий механизм параллелограммного типа, нижнее звено которого выполнено в виде рычага первого рода, на одном плече которого расположена ось ролика торможения, а ко второму плечу с помощью болта прикреплен один конец гибкого нерастяжимого троса, механизм стабилизации крена, сиденье, пружину растяжения, механизм регулировки растяжения пружины с подвижным штоком, гибкий нерастяжимый трос, соединяющий пружину и нижнее звено параллелограммного механизма, два направляющих ролика. Ось одного закреплена на неподвижном звене, ось второго закреплена на неподвижном основании. Трос имеет возможность при подъеме или опускании сиденья в крайних положениях огибать ролик торможения, ось которого закреплена на одном плече нижнего подвижного звена параллелограммного механизма, выполненного в виде рычага первого рода, либо в зоне квазинулевой жесткости не огибать ролик торможения, расположенный на нижнем подвижном звене. При поворотах параллелограммного механизма и связанным с ним изменением высоты подъема сиденья суммарная длина пружины с тросом меняется. Это обеспечивает режим квазинулевой жесткости в средней части диапазона вертикальных перемещений сиденья и одновременно плавное увеличение вертикальной силы, действующей на сиденье, при выходе за границы средней области вертикальных перемещений сиденья, соответствующей зоне квазинулевой жесткости. Обеспечивается возможность без ударов ограничивать вертикальные перемещения сиденья относительно основания при выходе за границы зоны квазинулевой жесткости. Сиденье с квазинулевой жесткостью, содержащее основание, направляющий шарнирно сочленённый механизм параллелограммного типа, состоящий из неподвижного звена, жестко закрепленного на основании, на неподвижном звене шарнирно закреплены нижнее и верхнее поворотные звенья, к которым шарнирно прикреплено подвижное боковое звено параллелограммного механизма, механизм регулировки растяжения пружины с подвижным штоком, механизм стабилизации крена, сиденье и пружину растяжения, неподвижный конец которой соединен со штоком механизма растяжения, подвижный конец пружины соединен с гибким нерастяжимым тросом, при этом трос постоянно огибает два направляющих ролика, ось одного из которых закреплена на неподвижном звене, ось второго закреплена на неподвижном основании, отличающееся тем, что нижнее поворотное звено выполнено в виде рычага первого рода, на одном плече которого установлен тормозной ролик, который при подъеме/опускании сиденья на величину, превышающую зону квазинулевой жесткости, вступает в контакт с тросом и дополнительно натягивает его, растягивая пружину.