ELECTRONIC 4WD SYSTEM HAVING REINFORCED ABS COOPERATIVE CONTROL PERFORMANCE AND METHOD OF CONTROLLING SAME
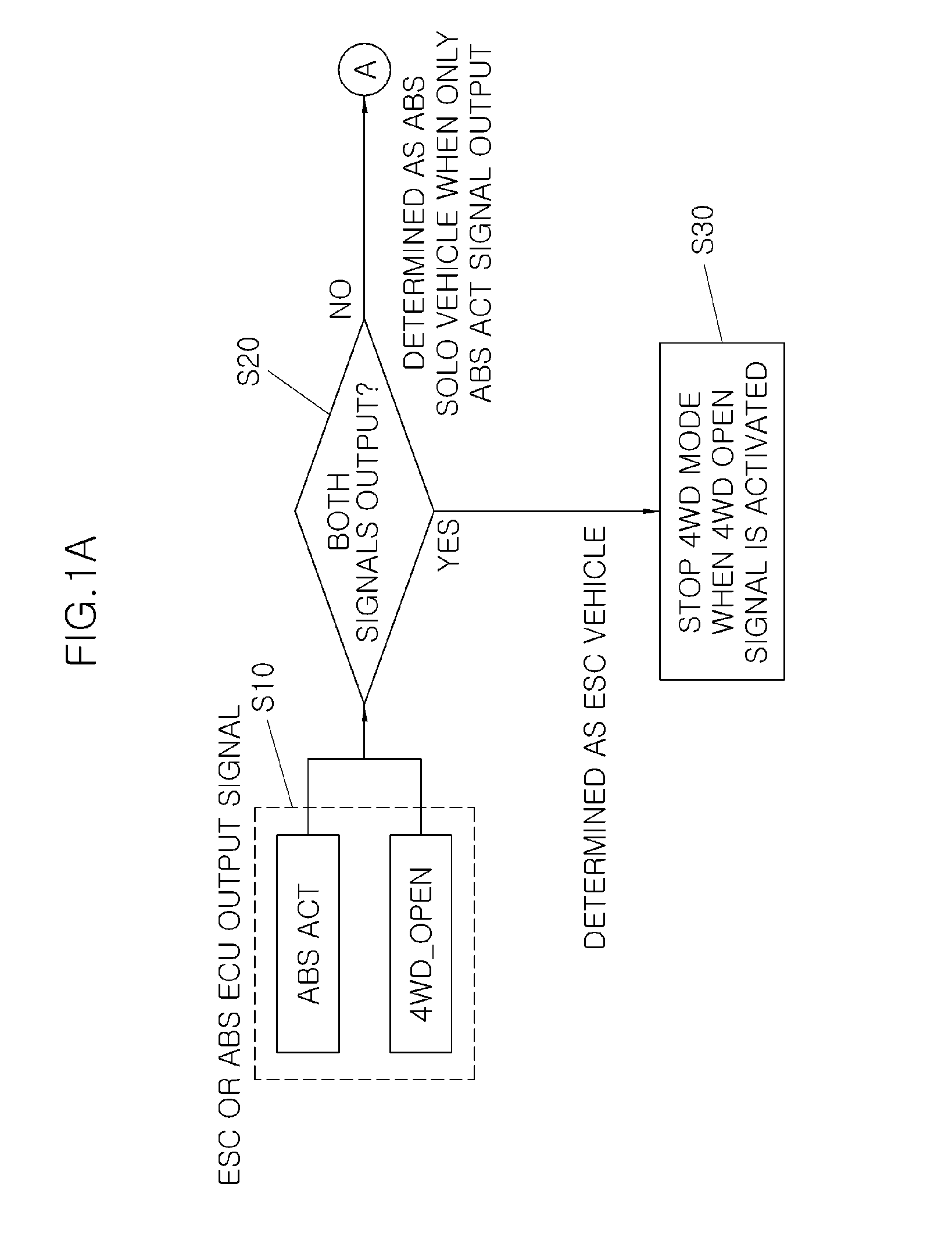
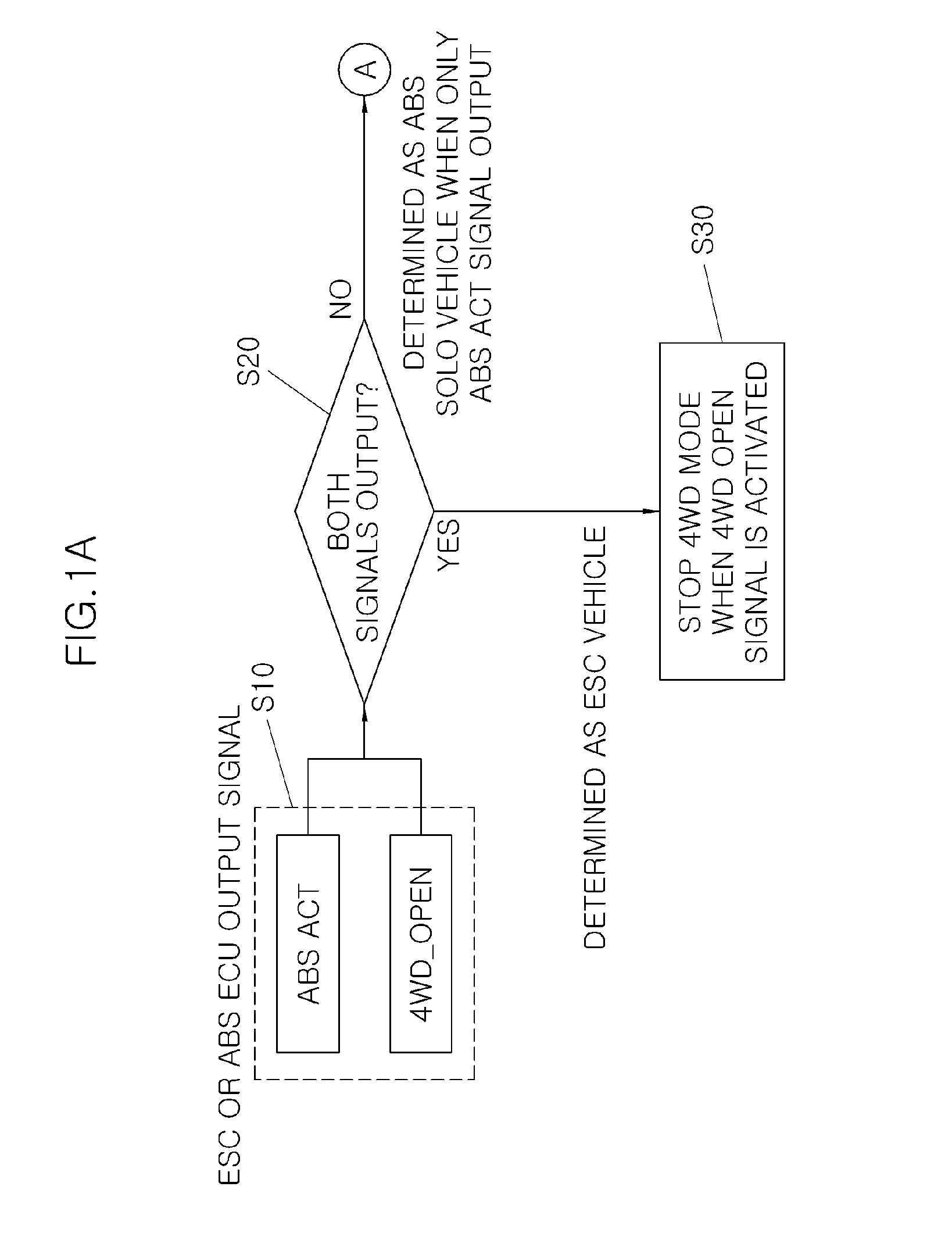
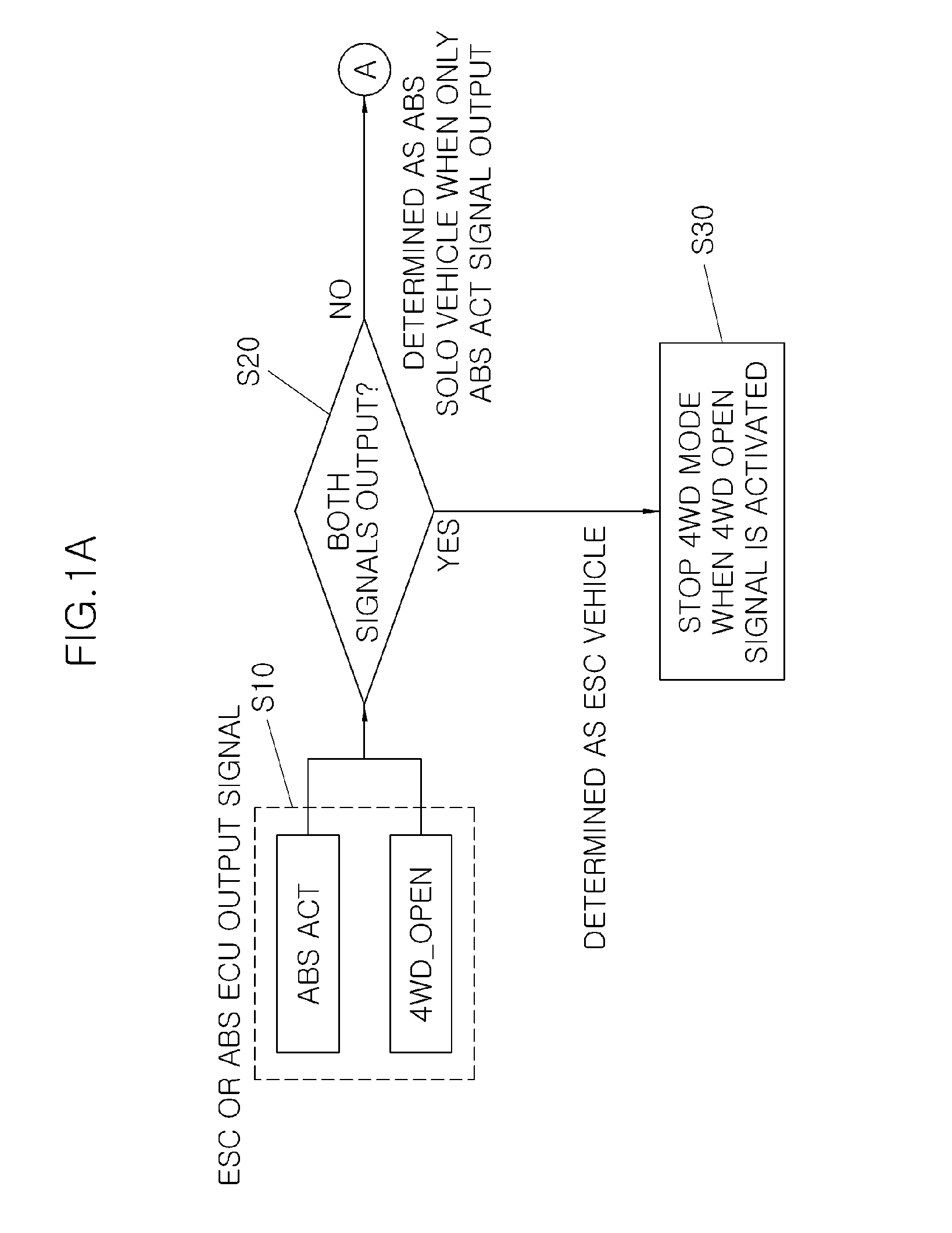
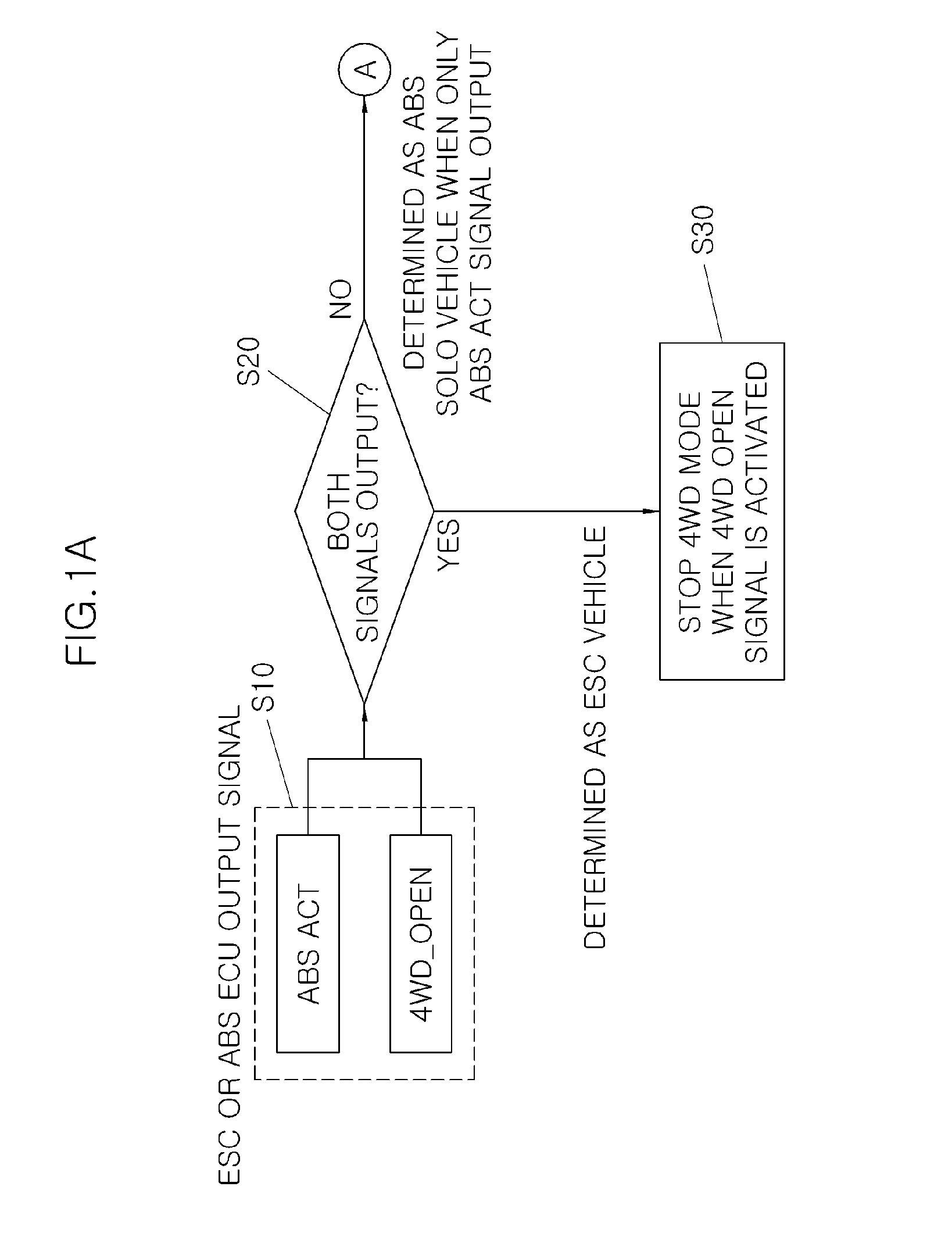
This application claims priority to Korean Patent Application No. 10-2014-0136806, filed on Oct. 10, 2014 with the Korean Intellectual Property Office, which is incorporated herein by reference in its entirety. 1. Field of the Invention Exemplary embodiments of the present invention relate to an electronic 4 WD system, and more particularly, to an electronic 4 WD system preventing undesirable conversion into a 2 WD mode due to a side effect of a 4 WD control logic without an additional logic of an ABS (Anti-Lock Brake System) ECU (Electronic Control unit), and a method of controlling the same. 2. Description of Related Art In general, an ESC (Electronic Stability Control) system, a TCS (Brake Traction Control System), and an ABS (Anti-Lock Brake System) are a kind of devices for reinforcing stability of a vehicle. The ESC system is based on a technology of keeping a vehicle in a stable position and correcting a mistake by a driver by sensing all of the position of a steering wheel, the speed of wheels, and the centrifugal force on the vehicle, the TCS is based on a technology of preventing slip of driving wheels when a vehicle is suddenly started or accelerated, and the ABS is based on a technology of preventing skid of wheels when a vehicle is braked. Accordingly, the ESC system, TSC, and ABS improve the performance of 4 WD (Four Wheel Drive) vehicles that obtain the maximum driving force by simultaneously rotating four, that is, front and rear wheels. In particular, a 4 WD control logic of an electronic 4 WD system in a 4 WD vehicle further improves stability of a vehicle against sudden start, sudden acceleration, sudden turn, driving on a rough road, and driving on a low friction road, by cooperatively operating with a ECS system, a TCS, and an ABS. For example, in an emergency such as when an ABS is operated, the electronic 4 WD system is stopped by cooperative control of an ABS ECU and a 4 WD ECU performed by 4 WD control logic, thereby implementing cooperative control that considers first the braking stability of a vehicle. However, the 4 WD control logic in a 4 WD ECU generates a side effect such as an undesired stop of 4 WD control due to an operation signal of an ABS, so it may deteriorate the 4 WD performance in cooperative control with an ABS. For example, while a 4 WD vehicle with only an ABS (hereafter, referred to as an ABS solo 4 WD vehicle) is driven on a low-friction road (snowy road or icy road), when an ABS signal is generated by the difference in speed of a left wheel and a right wheel even if a brake pedal is not operated, a 4 WD control logic performs cooperative control for preventing 4 WD control for reinforcing driving stability of the vehicle, so a 4 WD mode is converted into a 2 WD mode. Accordingly, the 4 WD performance on a low-friction road (snowy road or icy road) is deteriorated and an electronic 4 WD system may be shut down. The side effects of the 4 WD control logic can be removed by an ESC ECU with a logic capable of removing the side effect, but an ABS ECU, unlike the ESC ECU, cannot be provided with a logic capable of removing the side effect of the 4 WD control logic. An embodiment of the present invention is directed to provide an electronic 4 WD system having reinforced ABS cooperative control performance and a method of controlling the same of preventing the performance of ABS SOLO 4 WD and shutting-down of an electronic 4 WD system, by removing a side effect of a 4 WD control logic performing cooperative control with an ABS from intention of braking by a driver through a brake pedal or an accelerator pedal, particularly, removing the limit in mounting a logic on the ABS with a sub-logic of the electronic 4 WD system, when a vehicle is driven on a low-friction road (snowy road or icy road) in which the ABS ACT is activated even without operating the brake pedal. In accordance with an embodiment of the present invention, a method of controlling an electronic 4 WD system having reinforced ABS cooperative control performance includes: (A) recognizing, by an electronic 4 WD system, an ABS ACT signal by an ABS (Anti-Lock Brake System) and a 4 WD_OPEN signal by an ESC (Electronic Stability Control) controller; (B) determining that a driver intends to brake a vehicle and stopping a 4 WD mode, when the ABS ACT signal and the 4 WD_OPEN signal are both recognized; (C) determining whether the vehicle is braked by intention of the driver on the basis of a brake pedal signal, when only the ABS ACT signal is recognized; and (D) stopping the 4 WD mode upon determination that the vehicle is braked by intention of the driver when the brake pedal signal is transmitted, or maintaining the 4 WD mode upon determination that the vehicle is braked regardless of intention of the driver, when the brake pedal signal is not transmitted. The determining whether the vehicle is braked by intention of the driver may further use a signal showing release of an accelerator pedal. In accordance with another embodiment of the present invention, an electronic 4 WD system having reinforced ABS cooperative control performance includes an ABS (Anti-Lock Brake System) controller and an ESC (Electronic Stability Control) controller that are connected by CAN communication, in which the system includes an ABS sub-logic that determines that it is an ESC vehicle and stops a 4 WD mode when an ABS ACT signal by the ABS controller and a 4 WD_OPEN signal by the ESC controller are both recognized, and determines that it is an ABS SOLO vehicle when only the ABS ACT signal is recognized, and stops the 4 WD mode only when a signal indicating that a brake pedal has been pressed down or a signal indicating that an accelerator pedal has been released is detected. According to the present invention, since the side effect of a 4 WD control logic such as undesired stop of 4 WD control in cooperative control with an ABS is removed by a sub-logic in a 4 WD ECU, ABS SOLO 4 WD in which only an ABS is mounted for 4 WD is implemented. Further, since the side effect of a 4 WD control logic such as stop of 4 WD control when an ABS signal is generated due to the difference in speed of left and right wheels without a brake operation on a low-friction road (snowy road or icy road) is removed only by a sub-logic of a 4 WD ECU, driving ability is not deteriorated and the electronic 4 WD system is not turned on, so the performance and stability of ABS SOLO 4 WD are considerably improved. Further, the present invention is connected with an electronic 4 WD system without changing design of an ABS or ESC, so it is very useful for an ABS SOLO 4 WD vehicle or a 4 WD vehicle with an ABS and an ESC controller. Reference numeral ‘S10’ indicates a step in which ABS ACT and 4 WD_OPEN signals are input to the electronic 4 WD system 10, in which the ABS ACT signal is generated by an ABS (Anti-Lock Brake System) controller 200 and the 4 WD_OPEN signal is generated by an ESC (Electronic Stability Control) controller 100. In detail, the ABS controller 200 uses the ABS ACT signal as a stop signal requested by a 4 WD ECU. Because a logic for removing the side effect of a 4 WD control logic cannot be loaded on the ABS controller 200 in an ABS vehicle, there is no 4 WD OPEN signal. In contrast, the ESC controller 100 uses the 4 WD_OPEN signal as a stop signal requested by a 4 WD ECU, because whether a driver operates a brake pedal is determined by checking the pressure of a master cylinder in a brake when an ABS ACT signal is activated. That is, as shown The ABS_ACT and the 4 WD_OPEN are output as CAN SIGNALs. Reference numeral ‘S20’ indicates a step of determining whether an ABS_ACT and a 4 WD_OPEN are both recognized by the electronic 4 WD system 10. When the electronic 4 WD system 10 recognizes both of the ABS_ACT and the 4 WD_OPEN in Step (S20), the electronic 4 WD system 10 determines that it is an ESC vehicle and enters Step (S30), thereby performing cooperative control for stopping a 4 WD mode according to activation of an 4 WD OPEN signal. In contrast, when the electronic 4 WD system 10 recognizes only the ABS_ACT in Step (S20), the electronic 4 WD system 10 determines that it is an ABS SOLO vehicle and enters a step, such as Step (S40), for removing the side effect of a 4 WD control logic. In detail, the intention of braking by a driver is determined in Step (S40), and to this end, the electronic 4 WD system 10 determines whether the brake pedal has been pressed down in response to a signal from a brake pedal sensor or whether the accelerator pedal has been released in response to a signal from an accelerator pedal sensor. When the electronic 4 WD system 10 recognizes that the brake pedal has been pressed down and the accelerator pedal has been released in Step (S40), the system directly enters Step (S50), thereby performs cooperative control for stopping the 4 WD mode in accordance with the intention of braking by the driver. On the contrary, when the electronic 4 WD system 10 does not recognize that the brake pedal has been pressed down or the accelerator pedal has been released in Step (S40), the system directly enters Step (S60), determines that activation of ABS_ACT is caused by the difference in speed of left and right wheels without a brake operation on a low-friction road (snowy road or icy road), and keeps the 4 WD mode. The control results of Step (S20), Step (S40), and Step (S60) are exemplified in In the electronic 4 WD system having reinforced ABS cooperative control performance according to the embodiment, the ABS ACT signal by the ABS (Anti-Lock Brake System) controller 200 and the 4 WD_OPEN signal by the ESC (Electronic Stability Control) controller 100 are used, and when the ABS ACT signal and the 4 WD_OPEN signal are recognized, it is determined that it is an ESC vehicle and a 4 WD mode is stopped, but when only the ABS ACT signal is recognized, it is determined that it is an ABS vehicle and the intention of a user is determined on the basis of whether a brake pedal has been pressed down or an accelerator pedal has been released, and then a 4 WD mode is stopped. Accordingly, the side effect of a 4 WD control logic on a low-friction road (snowy road or icy road) with ABS ACT activated without a brake pedal operation is removed. In particular, the limit of loading a logic on the ABS controller 200 is removed by a sub-logic of the electronic 4 WD system, so the driving ability of ABS SOLO 4 WD is not deteriorated and the electronic 4 WD system is not turned off. The foregoing exemplary embodiments are only examples to allow a person having ordinary skill in the art to which the present invention pertains (hereinafter, referred to as “those skilled in the art”) to easily practice the present invention. Accordingly, the present invention is not limited to the foregoing exemplary embodiments and the accompanying drawings, and therefore, a scope of the present invention is not limited to the foregoing exemplary embodiments. Accordingly, it will be apparent to those skilled in the art that substitutions, modifications and variations can be made without departing from the spirit and scope of the invention as defined by the appended claims and can also belong to the scope of the present invention. The present invention relates to an electronic 4 WD system having reinforced ABS cooperative control performance, in which an ABS ACT signal by an ABS (Anti-Lock Brake System) controller and a 4 WD_OPEN signal by the ESC (Electronic Stability Control) controller are used. When the ABS ACT signal and the 4 WD_OPEN signal are recognized, it is determined that it is an ESC vehicle and a 4 WD mode is stopped. When only the ABS ACT signal is recognized, it is determined that it is an ABS vehicle and the intention of a user is determined on the basis of whether a brake pedal has been pressed down or an accelerator pedal has been released, and then a 4 WD mode is stopped. 1. A method of controlling an electronic 4 WD system having reinforced Anti-Lock Brake System (ABS) cooperative control performance, the method comprising:
(A) recognizing, by an electronic 4 WD system, an ABS ACT signal by an ABS controller and a 4 WD_OPEN signal by an ESC (Electronic Stability Control) controller; (B) determining that a driver intends to brake a vehicle and stopping a 4 WD mode, when the ABS ACT signal and the 4 WD_OPEN signal are both recognized; (C) determining whether the vehicle is braked by intention of the driver on the basis of a brake pedal signal, when only the ABS ACT signal is recognized; and (D) stopping the 4 WD mode upon determination that the vehicle is braked by intention of the driver when the brake pedal signal is transmitted, or maintaining the 4 WD mode upon determination that the vehicle is braked regardless of intention of the driver, when the brake pedal signal is not transmitted. 2. The method of 3. The method of 4. An electronic 4 WD system having reinforced Anti-Lock Brake System (ABS) cooperative control performance, wherein an ABS controller and an Electronic Stability Control (ESC) controller are connected by CAN communication, and
the system includes an ABS sub-logic that determines that it is an ESC vehicle and stops a 4 WD mode when an ABS ACT signal by the ABS controller and a 4 WD_OPEN signal by the ESC controller are both recognized, and determines that it is an ABS SOLO vehicle when only the ABS ACT signal is recognized, and stops the 4 WD mode only when a signal indicating that a brake pedal has been pressed down or a signal indicating that an accelerator pedal has been released is detected.CROSS-REFERENCE TO RELATED APPLICATION
BACKGROUND OF THE INVENTION
SUMMARY OF THE INVENTION
BRIEF DESCRIPTION OF THE DRAWINGS
DESCRIPTION OF SPECIFIC EMBODIMENTS