In Vivo Capsule Device with Electrodes
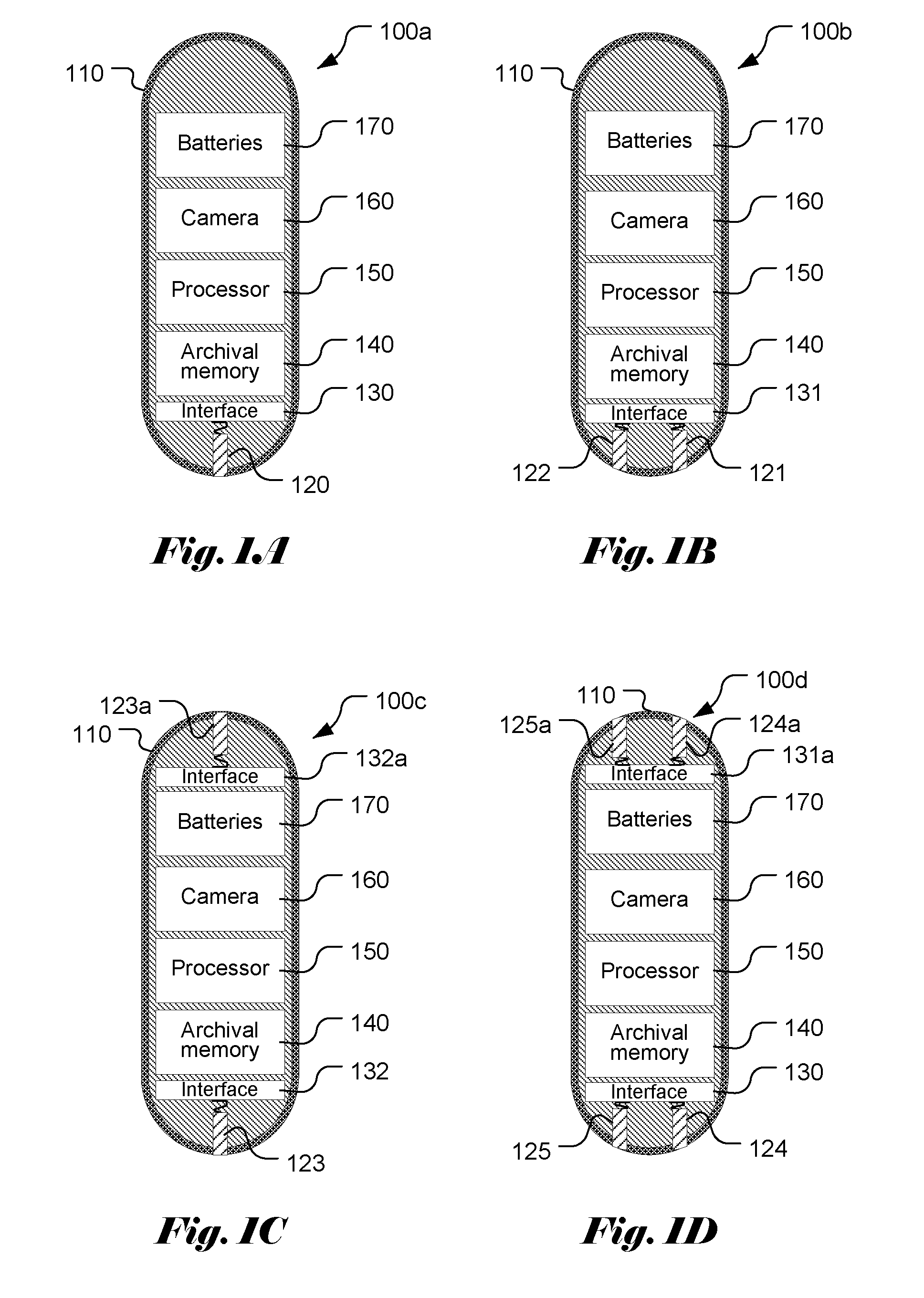
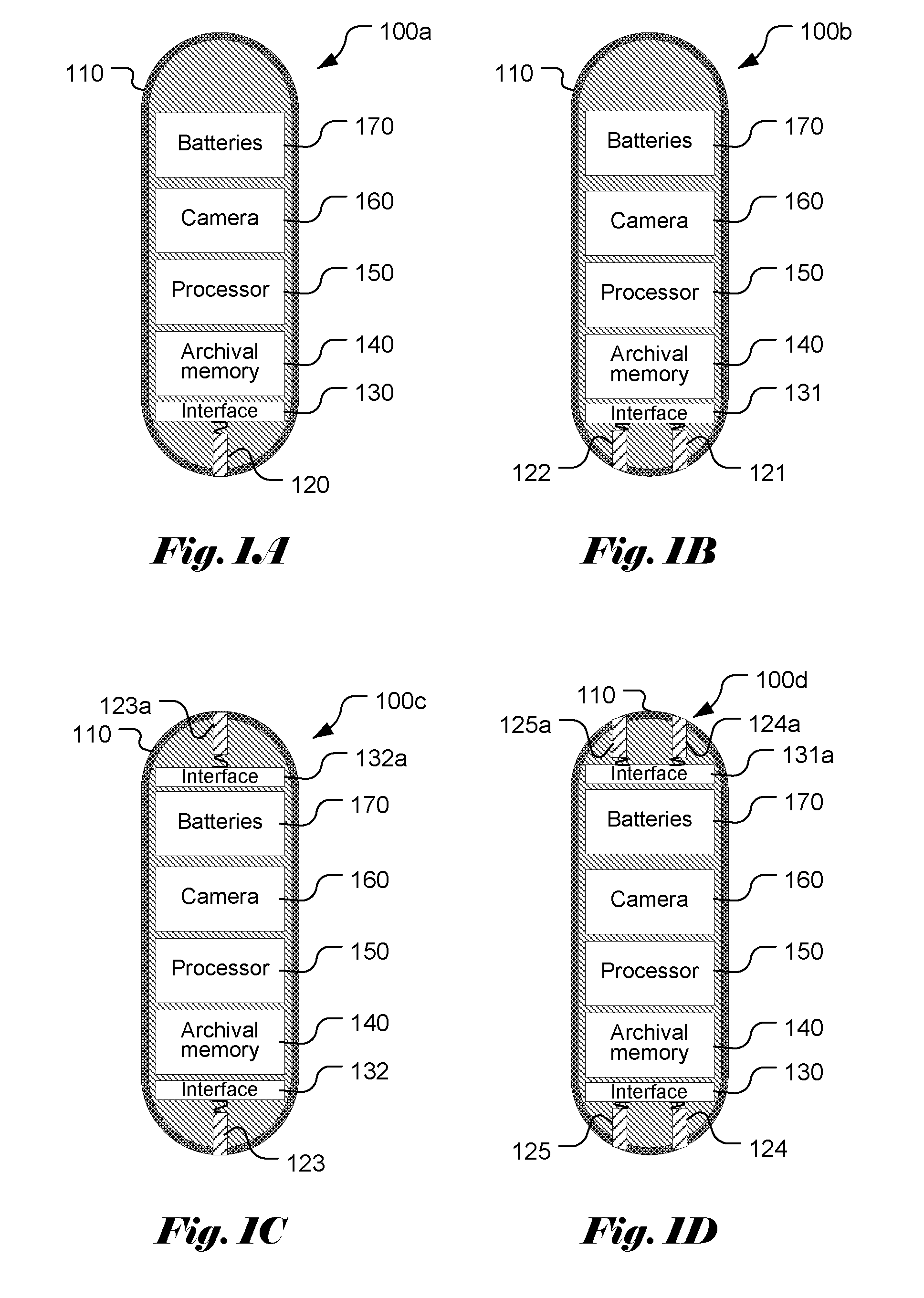
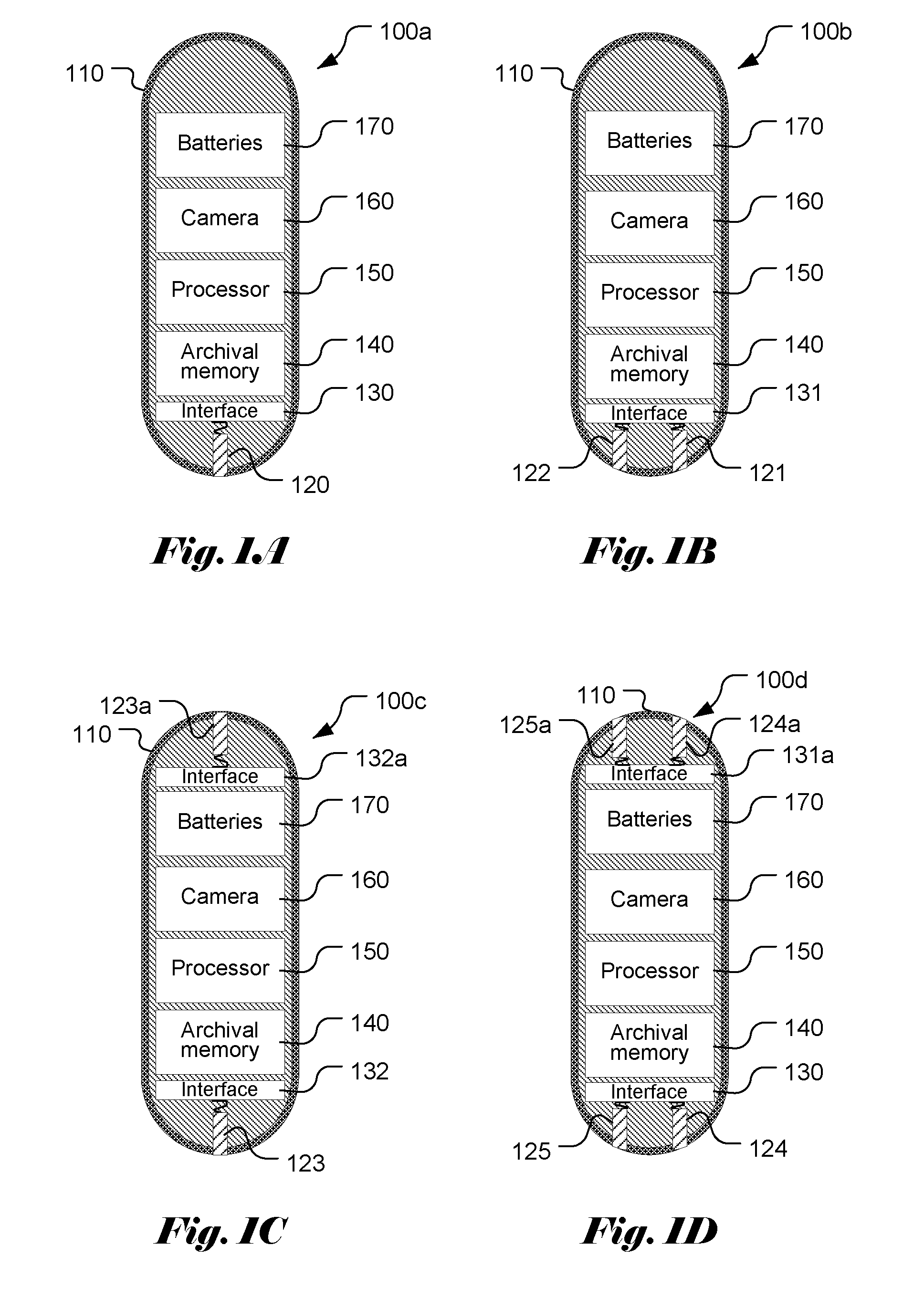
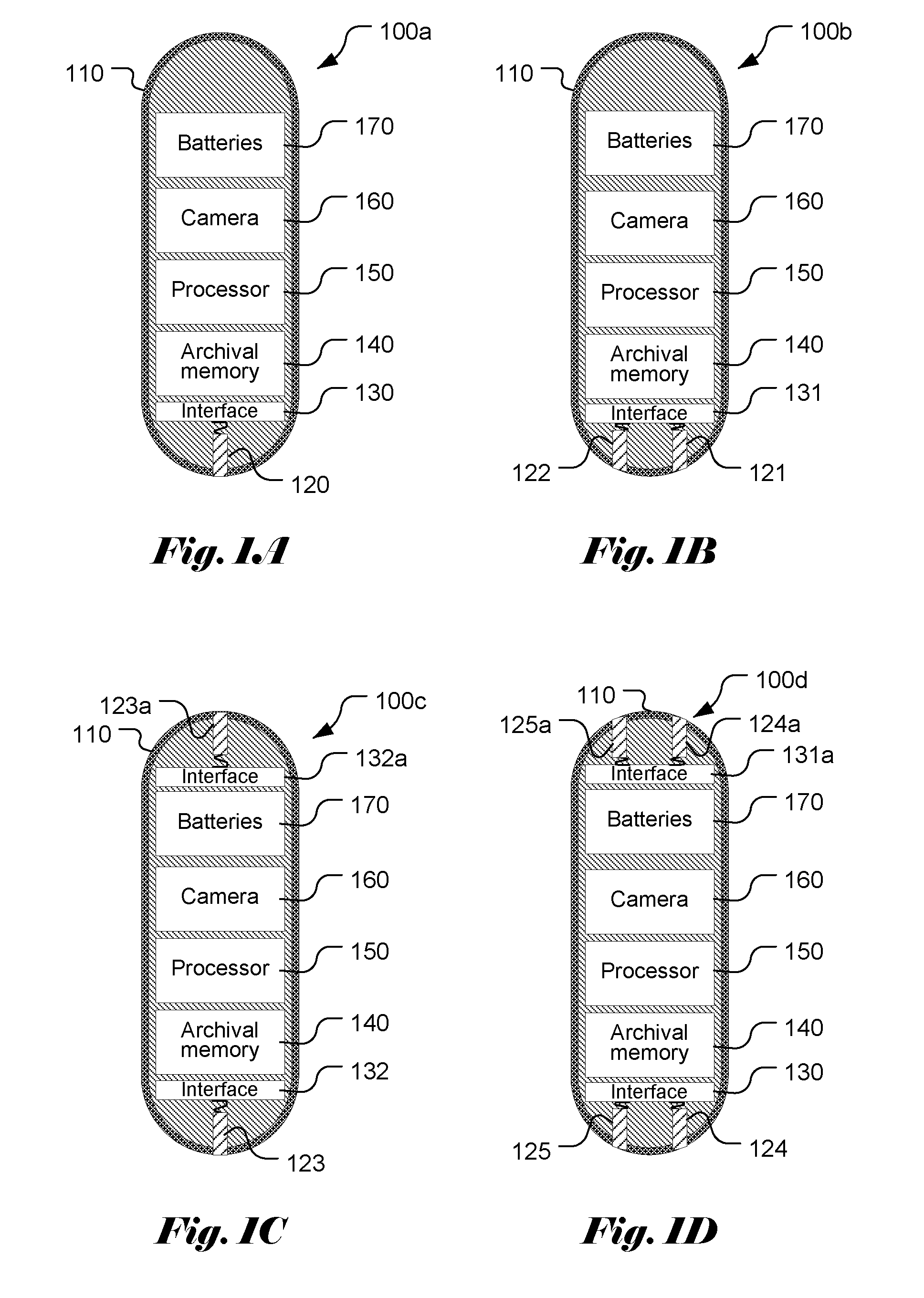
The present invention is a divisional application of and claims priority to U.S. patent application, Ser. No. 13/945,598, filed on Jul. 18, 2013, which is a non-provisional patent application and claims priority to U.S. Provisional Application, Ser. No. 61/683,878, filed on Aug. 16, 2012. The present invention is also related to U.S. Provisional Patent Application, Ser. No. 61/657,747, filed on Jun. 9, 2012. The U.S. Patent Application and U.S. Provisional Patent Applications are hereby incorporated by reference in their entireties. The present invention relates to in vivo capsule device. In particular, the present invention relates to multi-purpose electrodes, detection of capsule direction inside the GI tract and the capsule device movement control. Devices for imaging body cavities or passages in vivo are known in the art and include endoscopes and autonomous encapsulated cameras. Endoscopes are flexible or rigid tubes that pass into the body through an orifice or surgical opening, typically into the esophagus via the mouth or into the colon via the rectum. An image is formed at the distal end using a lens and transmitted to the proximal end, outside the body, either by a lens-relay system or by a coherent fiber-optic bundle. A conceptually similar instrument might record an image electronically at the distal end, for example using a CCD or CMOS array, and transfer the image data as an electrical signal to the proximal end through a cable. Because of the difficulty traversing a convoluted passage, endoscopes cannot reach the majority of the small intestine and special techniques and precautions, that add cost, are required to reach the entirety of the colon. Capsule endoscope is an alternative in vivo image sensor that addresses many of these problems. A camera is housed in a swallowable capsule, along with a radio transmitter for transmitting data, primarily comprising images recorded by the digital camera, to a base-station receiver or transceiver and data recorder outside the body. Another autonomous capsule camera system with on-board data storage was disclosed in the U.S. patent application Ser. No. 11/533,304, filed on Sep. 19, 2006. A typical procedure of imaging the gastrointestinal track based on a wireless capsule camera consists of an inpatient visit in the morning during which a clinician attaches the base station apparatus to the patient and the patient swallows the capsule. The system records images beginning just prior to swallowing and records images of the gastrointestinal (GI) tract until its battery becomes fully discharged. For the system based on an autonomous capsule camera, the images captured will be stored in on-board memory and there is no need to attach a base station to the patient. After the capsule camera is swallowed, peristalsis propels the capsule through the GI tract. The rate of passage depends on the degree of motility. Usually, the small intestine is traversed in 4 to 8 hours. It takes longer to travel through the entire GI tracts. In order to reduce the procedure time for examining the colon, medication is needed to increase the transit speed. Some patients have known slow transit speed and in general the transit time is even long while a patient is sleeping. It is desirable that a means for reducing the procedure time by applying an electrical stimulus to the capsule in vivo. While the capsule camera usually moves in the forward direction (i.e., toward the rectum), it may undergo a retrograde motion occasionally, particularly in the colon. Furthermore, the capsule camera may stay at one place for certain periods of time. Beside the capsule camera, there are other in vivo capsule devices used for various diagnosis and treatment purposes. Other capsule devices also encounter the same issue as the capsule camera. It is desirable to provide an apparatus and method to influence the movement of the capsule device in the GI tract. The capability to influence the movement of the capsule device may offer benefits to broad applications associated with a capsule device. A capsule endoscopic device with movement control is disclosed. The capsule endoscopic device comprises a capsule housing, one or more electrodes disposed fixedly through the capsule housing, a signal generation/signal driver unit, an interface circuit and a switch module. The electrodes apply electrical stimulus to living body tissue in a patient's gastrointestinal track. The signal generation/signal driver unit generates the electrical stimulus for the electrodes. The switch module is coupled to the electrodes, the signal generation/signal driver unit and the interface circuit. Furthermore, the switch module is configured to connect the electrodes to the signal generation/signal driver unit or the interface circuit depending on an operation mode. The switch module, the signal generation/signal driver unit and the interface circuit are inside the capsule housing. When the capsule endoscopic device is set to a capture mode, the switch module is configured to connect the electrodes to the signal generation/signal driver unit during the capsule endoscopic device travels through the patient's gastrointestinal track. When the capsule endoscopic device is set to a download mode, the switch module is configured to connect the electrodes to the interface circuit after the capsule endoscopic device exits from a patient's body. The interface circuit retrieves the image data and/or other sensing data stored in a memory inside the capsule housing and provides the image data and/or other sensing data to the electrodes. The memory may correspond to an archival memory. The capsule endoscopic device may further comprise a signal processing circuit inside the capsule housing, and the signal processing circuit is coupled to the switch module and a second memory. The capsule endoscopic device can be set to a data collection mode and the switch module is configured to connect the electrodes to the signal processing circuit during the capsule endoscopic device is travels the patient's gastrointestinal track and the signal processing circuit collects electrochemical parameters through the electrodes. The electrochemical parameters are stored in the second memory and the second memory may correspond to a second archival memory. The electrochemical parameters and the image data and/or other sensing data can be stored in a same archive memory. It will be readily understood that the components of the present invention, as generally described and illustrated in the figures herein, may be arranged and designed in a wide variety of different configurations. Thus, the following more detailed description of the embodiments of the systems and methods of the present invention, as represented in the figures, is not intended to limit the scope of the invention, as claimed, but is merely representative of selected embodiments of the invention. Reference throughout this specification to “one embodiment,” “an embodiment,” or similar language means that a particular feature, structure, or characteristic described in connection with the embodiment may be included in at least one embodiment of the present invention. Thus, appearances of the phrases “in one embodiment” or “in an embodiment” in various places throughout this specification are not necessarily all referring to the same embodiment. Furthermore, the described features, structures, or characteristics may be combined in any suitable manner in one or more embodiments. One skilled in the relevant art will recognize, however, that the invention can be practiced without one or more of the specific details, or with other methods, components, etc. In other instances, well-known structures, or operations are not shown or described in detail to avoid obscuring aspects of the invention. The illustrated embodiments of the invention will be best understood by reference to the drawings, wherein like parts are designated by like numerals throughout. The following description is intended only by way of example, and simply illustrates certain selected embodiments of apparatus and methods that are consistent with the invention as claimed herein. In an embodiment according to the present invention, the capsule incorporates an electrical terminal, where the electrical terminal is electrically connected to a circuit inside the capsule housing. The electrical terminal is also called an electrode. While In one implementation, multiple electrodes may be configured around the longitudinal axis on one end of the capsule symmetrically, such as in a circular arrangement. The plane associated with the circle is preferred to be perpendicular to the longitudinal axis of the capsule to increase the chance that the electrodes will touch the mucosal surface. For example, In yet another implementation, an electrode is implemented with an area covered by traces of conductive surface material. These conductive traces are connected to other components or contact points inside the capsule via a conductive part such as a metal stud or a metal wire. The electrode may be connected to an internal signal or stimulus sources via the conductive part. In one implementation, feed-through is used to connect the internal circuit to the external terminal or electrode. The implementation of feed-through needs to maintain the hermetic seal of the capsule. In one example, adhesive is applied and cured to provide the seal. An embodiment of the present invention configures one or more electrodes for multiple functions. For example, the electrode may be coupled to the storage device within the capsule to download data after the capsule is excreted from the human body. Furthermore, the electrode may also be used to exert electrical stimulus in vivo to stimulate the intestine muscle contraction to change motor activity and to cause the capsule to move faster or slower, or change direction of the movement. Therefore, The electrodes may be configured to provide the function of in vivo data transmission using the human body as an electrical media, where an electrical signal may be exerted on the electrodes to sent signal to an external device coupled to the human body. The electrodes may also be configured to provide sensing function such as measuring electrochemical parameters within the GI track. The electrodes can be coupled to a processing unit to provide the signal required to drive the electrodes or to process the signal sensed by the electrodes. The processing unit may be implemented in a state machine and a circuit module comprising logic circuits and/or controller. Furthermore, the electrodes may be coupled to a switching circuitry, where the switching circuitry may configure the electrodes to perform a desired function from a set of functions. For example, the electrodes may be configured to perform movement adjustment function when the capsule is inside the GI track. While the capsule device is inside the human body, the electrodes may be configured, by time sharing with the movement adjustment function, to collect electrochemical data in the GI tract. Alternatively, multiple sets of electrodes can be used for concurrent movement adjustment and electrochemical data. collection. Furthermore, the electrodes are configured to perform data download function after the capsule device exits from the human body. A system incorporating an embodiment of the present invention may comprise a switch module that selectively connects the electrodes to a respective module to perform the selected function. The modules performing various functions may be implemented on separate modules with respective processor and respective analog driving circuitry. Some of the separate modules may share some common components. Furthermore, the modules may also be implemented as a single integrated module. In one embodiment a programmable processor could perform different functions with different embedded firmware codes. In the data collection mode, the electrodes are connected to the signal amplifier/processing module 370 to gather the electrochemical data and stored in archival memory 350. In the data download mode, the data stored in the archival memory 350 is read out into the interface circuit 360 and the module is coupled to the electrodes 340 so that an external device may access data stored inside the capsule device through the electrodes 340 without the need to physically open the capsule device. The capsule device is typically in an elongated shape so that the capsule device will travel primarily along the longitudinal direction. However, it is uncertain regarding which end of the capsule will be facing the forward direction when moving along the GI tract. Therefore, when a stimulus signal is applied to the electrode for adjusting the capsule movement, the capsule device may be inadvertently moved in a wrong direction. An embodiment according to the present invention incorporates a set of electrodes on each end of the capsule device and a direction determination module to determine the direction of the capsule device in the GI tract. Upon the direction determined and the desired movement adjustment, the system embodying the current invention may configure the capsule device to apply correspond stimulus signals to the electrodes. For example, if a movement adjustment to cause the capsule device move forward is desirable, a stimulus signal can be applied to the electrodes at the end of the capsule device corresponding to the backward end. The signal from the electrodes will stimulate the mucosal surface and cause it to contract. The capsule will move in the forward direction due to the intestine contraction caused by the electrical stimulus. When a stimulus needs to be applied to one end of the electrodes, the electrodes at the other end can be tri-stated, kept open, or high input/output resistance. In one embodiment, another set of switch may switch stimulus to either end of capsule. In one embodiment of the present invention, the capsule device incorporates LED lights on four sides or more to illuminate the intestine wall. Based on light intensities received from different sides of the capsule, it can determine which side of the capsule is closer to the intestine wall. Alternatively, pose position derivation can be used to determine which side of the capsule is closer to the intestine wall. Accordingly, the electrodes on one side may be applied stronger or weaker stimulus than the other side at the same end of the capsule to steer the capsule into a desirable pose position. In one embodiment according to the present invention, a capsule camera is used as the capsule device and the capsule camera direction inside the GI tract is determined according to images captured by the capsule camera. Furthermore, motion estimation can be used to determine motion information associated with the capsule, such as capsule direction, capsule displacement, capsule movement or any combination. The motion estimation can be derived based on a subset of the images, such as spatially and/or temporarily sub-sampled images, or cropped images. Global motion estimation can be used to determine the direction of movement. Since the capsule device moves primarily in a forward direction in the GI track, the global motion can discern the direction of capsule device movement. Motion information such as motion vectors of a plurality of blocks could be used to determine the direction of the global motion. The average of these motion vectors, the mean, or the majority of these motion vectors, the peak of the histogram of these motion vectors, the median of the motion vectors, etc., can be used to determine the direction of the capsule device inside the GI tract. To increase the accuracy in determining the direction of the capsule device inside the GI tract, the global motion vectors derived from images captured at different times over a time period can be used jointly to determine the direction of the capsule device inside the GI tract. For example, the average, mean, the majority of sign, the histogram, of the global motion vectors corresponding to images captured at different times over a time period can be used jointly to determine the direction of the capsule device inside the GI tract. Sometimes the capsule device may travel sideway, i.e., the axis of the capsule device corresponding to elongated direction is perpendicular to the longitudinal direction of the GI tract. The benefit of direction determination based on multiple global motion vectors over a period of time becomes apparent in this case. In one embodiment according to the present invention, no stimulus is exerted on the electrodes when decision of capsule direction inside the GI track cannot be decided. The process of determining capsule direction inside the GI tract based on images captured can be made in vivo by the capsule device or externally by an external device such as a base station. For a wireless capsule camera without on-board storage for image data, the captured images are transmitted to the base station through the wireless link. In such case, the process of determining capsule motion information such as direction, displacement and speed inside the GI tract can be made at the base station. The decision on capsule direction inside the GI tract can be communicated back to the capsule through the wireless link. The capsule camera can apply the stimulus signal to the electrodes according to the information received from the base station. An exemplary block diagram is shown in When the capsule device travels inside the GI tract, the differences in transit time through the intestine among people are widespread. On one hand, when the capsule device moves too slowly inside the GI tract, it may be desired to increase the transit speed in the forward direction. On the other hand, when the capsule device moves too fast inside the GI tract, it may be desired to decrease the transit speed in the forward direction. When stimulus is needed to adjust the capsule device movement, the capsule direction inside the GI tract has to be known before the stimulus signal is applied. The motion vector-based direction determination may be used to determine the capsule direction inside the GI tract. Sometimes different sections of GI tract of the same person may have different transit speeds and the stimulus is needed in some part of the intestine to increase or to decrease the speed. In some sections of the GI tract, it may be preferred to have more images taken per distance travelled. Therefore, the control for adjusting capsule device movement may be different for different sections of the GI tract. The control for adjusting the capsule device movement may include criteria regarding when to apply the stimulus and the strength or length of the stimulus signal. Since the control for adjusting capsule device movement may be dependent on particular sections of the GI tract, such as the colon section and the small bowel section, the system may need to discern the different sections of the GI track. In one embodiment of the present invention, the ratio of light intensity from the light sources versus the pixel values received by the image sensor is used to determine the different sections of the GI tract. When the capsule device is a capsule camera, the images captured by the capsule camera can be used to discern the speed of the capsule device In this case, the image sensor inside the capsule device, which forms an integral part of a capsule camera, is used as the sensing device for determining the capsule direction inside the GI tract. As mentioned before, motion estimation may be used to determine the capsule movement between captured images. The distance travelled by the capsule camera can be divided by the corresponding time interval to determine the transit speed. In another embodiment, an accelerometer is incorporated inside the capsule as a sensing device to decide the speed of the capsule device. The integration of acceleration over time is used to measure the speed of the capsule device. Furthermore, the speed, in turn, can be integrated to derive the distance. In this case the speed of transit can be determined. If the measured speed is different from a desired speed, the stimulus signal can be applied to the electrodes of the capsule device to adjust the speed. In order to properly control the movement of the capsule device, the strength, duration and frequency of the stimulus have to be determined on the fly. For different individuals, the required strength and frequency of the stimulus to cause desired capsule movement may be different. Therefore, the strength and frequency of the stimulus is determined adaptively based on the responses of individuals to the applied stimulus according to an embodiment of the present invention. For example, if a stimulus applied does not cause anticipated motor activity or transit speed change, then the control module may increase the intensity of each application of the stimulus or increase the duration of each application of the stimulus. Alternatively, the control module may increase the frequency of the applying the stimulus. For safety reason, there is an upper limit on the strength of the stimulus. In one embodiment adjusting duty cycle or pulse width modulation is used to control speed. The bowel transit is episodic in nature and the need to apply the stimulus may be made on a longer period of time according to a predetermined schedule and/or location. For example, it may take about 4 hours for a capsule device to reach the cecum after the device is swallowed, or it may take the capsule device 10 hours to travel about 5 meters to reach the cecum. Accordingly, the capsule device may be configured to activate the movement adjust function upon a predetermined schedule or when the capsule device reached the intended location. The stimulus strength and duration will be adapted to the individual as well as the specific section of GI tract to achieve desired response of motor activity. In one embodiment the stimulus is applied simply after certain hours, for example 8 hours. The flow chart in As mentioned earlier that it may be desirable to cause the capsule device to travel slower in a section of the GI track (e.g., the small intestine section) so that it can capture more images or collect more data in the GI track. The exemplary movement adjustments as shown in The process of determining the capsule direction inside the GI tract should be performed before the stimulus is applied to the electrodes. Consequently, there is a period of time that the capsule does not exert stimulus on the electrodes. This period of time for determining the capsule direction inside the GI tract is needed for the capsule device to gather multiple images and to make decision so as to be accurate and to avoid false determination causing the capsule to retrograde. Sometimes, the bowel activity is very low and this will make determination of the direction difficult. An embodiment according to the present invention may exert stimulus signals on both ends of the capsule (electrodes incorporated on both ends are assumed). The stimulus signals exerted on both ends of the capsule are substantially equal in intensity and duration in order to agitate the bowel momentarily. The stimulus signals can be applied to both ends substantially at the same time. The stimulus signals will trigger peristalsis to cause the capsule device to move by peristalsis. The direction detection can be performed and the determined direction can be used for capsule movement control by applying an appropriate stimulus to the electrodes at the correct end of the capsule. The series of process including initially applying the stimulus signal to cause the capsule device move due to agitated bowel, detecting the capsule direction and applying stimulus signal to cause a desire capsule device movement, is called stimulus decision mode. The process of capsule movement control, as described above, by exerting stimulus is always performed after the capsule direction is determined. However, the stimulus may also be applied while the decision is being made. Due to the advancement in hardware technology, the size of capsule device may be further shrunk. When the small-size capsule device travels in a wider section of the GI tract, the capsule device may flip sometimes causing the forward end to become the rear end. Therefore, the decision regarding which end of the capsule is facing forward direction has to be made frequently. However, if the speed detection shows that the capsule moves at the desired speed during a period of time, then there is no need to perform direction detection and no stimulus is needed either. For a very small capsule device, the capsule device tends to turn more easily. In order to detect the capsule device turn, pose estimation is utilized. The pose (i.e., the three dimensional position and orientation with respect to a coordinate system) of the capsule device can be estimated from images captured by the capsule device using pose estimation technique. Techniques for pose estimation are well known in the field of machine vision and the details are not repeated here. In an ideal case, the capsule longitudinal axis should be aligned with the axis perpendicular to the cross section of the GI tract and the capsule faces a forward direction. If the capsule tilts, there will be an angle between the two axes. The angle between the two axes can be determined from the pose of the capsule device. If the angle exceeds a threshold, it may be desirable to apply a stimulus to the capsule device to reduce the tilt so that the capsule device will not turn inadvertently. For a wireless capsule device, the images can be transmitted to a base station so that the capsule pose information can be estimated at the base station. The estimated pose information can be transmitted to the capsule device so that the capsule device can adjust the speed and/or orientation according to the estimated pose information. Alternatively, the base station can determine the required control signal based on the estimated pose information and transmit the control information to the capsule device. If the capsule device uses on-board memory to store the captured images, the capsule device has to estimate the pose information using processor inside the capsule device. For a wireless capsule, a gyroscope, accelerometer, or electron compass can be placed both within the capsule and on patient's body (such as the torso). Based on sensed information from the sensing device within the capsule device and on the patient's body, information regarding whether the capsule device turns can be made by a base station. Accordingly, the base station may transmit the control signal to the capsule device. The above description is presented to enable a person of ordinary skill in the art to practice the present invention as provided in the context of a particular application and its requirements. Various modifications to the described embodiments will be apparent to those with skill in the art, and the general principles defined herein may be applied to other embodiments. Therefore, the present invention is not intended to be limited to the particular embodiments shown and described, but is to be accorded the widest scope consistent with the principles and novel features herein disclosed. In the above detailed description, various specific details are illustrated in order to provide a thorough understanding of the present invention. Nevertheless, it will be understood by those skilled in the art that the present invention may be practiced. An embodiment of the present invention to perform the steps disclosed in this application can be based on an application specific integrated circuit (ASIC), a microcontroller, or a hardware-based processor. An embodiment of the present invention may also be program codes to be executed on a Digital Signal Processor (DSP) to perform the processing described herein. The invention may also involve a number of functions to be performed by a computer processor, a digital signal processor, a microprocessor, or field programmable gate array (FPGA). These processors can be configured to perform particular tasks according to the invention, by executing machine-readable software code or firmware code that defines the particular methods embodied by the invention. The software code or firmware code may be developed in different programming languages and different format or style. The software code may also be compiled for different target platform. However, different code formats, styles and languages of software code and other means of configuring code to perform the tasks in accordance with the invention will not depart from the spirit and scope of the invention. The invention may be embodied in other specific forms without departing from its spirit or essential characteristics. The described examples are to be considered in all respects only as illustrative and not restrictive. The scope of the invention is, therefore, indicated by the appended claims rather than by the foregoing description. All changes which come within the meaning and range of equivalency of the claims are to be embraced within their scope. A capsule endoscopic device with movement control is disclosed. The capsule endoscopic device comprises a capsule housing, one or more electrodes disposed fixedly through the capsule housing, a signal generation/signal driver unit, an interface circuit and a switch module. The electrodes apply electrical stimulus to living body tissue in a patient's gastrointestinal track. The signal generation/signal driver unit generates the electrical stimulus for the electrodes. The switch module is coupled to the electrodes, the signal generation/signal driver unit and the interface circuit. Furthermore, the switch module is configured to connect the electrodes to the signal generation/signal driver unit or the interface circuit depending on an operation mode. The switch module, the signal generation/signal driver unit and the interface circuit are inside the capsule housing 1. A capsule endoscopic device comprising:
a capsule housing; one or more electrodes disposed fixedly through the capsule housing, wherein said one or more electrodes apply electrical stimulus to living body tissue in a patient's gastrointestinal track; a signal generation/signal driver unit to generate the electrical stimulus for said one or more electrodes; an interface circuit to read or write image data and/or other sensing data stored inside the capsule housing; and a switch module coupled to said one or more electrodes, the signal generation/signal driver unit and the interface circuit, wherein the switch module is configured to connect said one or more electrodes to the signal generation/signal driver unit or the interface circuit depending on an operation mode; and wherein the switch module, the signal generation/signal driver unit and the interface circuit are inside the capsule housing. 2. The capsule endoscopic device of 3. The capsule endoscopic device of 4. The capsule endoscopic device of 5. The capsule endoscopic device of 6. The capsule endoscopic device of 6. The capsule endoscopic device of 8. The capsule endoscopic device of claim 7, wherein the electrochemical parameters are stored in the second memory. 9. The capsule endoscopic device of 10. The capsule endoscopic device of CROSS REFERENCE TO RELATED APPLICATIONS
FIELD OF THE INVENTION
BACKGROUND AND RELATED ART
BRIEF SUMMARY OF INVENTION
BRIEF DESCRIPTION OF THE DRAWINGS
DETAILED DESCRIPTION OF THE INVENTION