TIME REVERSAL TECHNIQUE-BASED SYSTEM AND METHOD FOR MANIPULATING PARTICLES
本发明总体上涉及声操控技术领域,尤其涉及一种基于时间反转技术操控微粒的系统与方法。 声波作为一种机械波,可与声场内的微粒进行动量与能量交换,产生声辐射力,操控微粒运动。该技术已经应用到物理、化学、生物学等多个领域,因其具有非接触、无损伤,生物兼容性好等优点,受到广泛关注。当前声操控技术及器件主要针对操控物体在密度、声速等声参数均一的均匀介质(水,空气)中,这是因为声在均匀介质中的传播和分布是精确可控的,因此可以合成需要的声场剖面。而复杂非均匀介质(如人体等)中密度、声速等参数的非均匀分布,引起复杂的声反射、散射、折射和吸收等过程,难以对声的传播和能量分布精确建模,因此利用当前声操控技术在非均匀介质中很难产生满足操控需要的聚焦场、驻波场、涡旋场等声场,故难以实现对非均介质内微粒的操控。这极大限制了声操控器件在诸如体内定点给药、生殖医学等领域内的应用。 已知有利用一对超声探头产生驻波【参见Wu,J,Acoutiscal tweezers.J.Acoust.Soc.Am.1991.89(5),2140-2143.】或单阵元高频探头产生聚焦声场【参见Lee J,Teh S,Y Lee,A Kim,H.H Lee,Shung K.K.Single beam acoustic trapping.Appl Phys Lett.2009.95(7),73701(1)-73707(3).】在水中操控微粒。此外,还有利用制作出的二维面阵列探头通过在空气或水中精确调控相位达到在任意预设路径操控微粒的目的【参见Courtney,Charles R.P.Demore,Christine E.M.,Wu Hongxiao,Grinenko Alon,Wilcox Paul D.,Cochran Sandy,Drinkwater Bruce W.Independent trapping and manipulation of microparticles using dexterous acoustic tweezers;Appl Phys Lett.
2014.104(15),154103(1)-154103(4)./Marzo Asier,Seah Sue Ann,Drinkwater Bruce W.,Sahoo Deepak Ranjan,Long Benjamin,Subramanian Sriram;Nature Communications.2015.6,1-6./Yoichi Ochiai,Takayuki Hoshi,Jun Rekimoto.Three-Dimensional Mid-Air Acoustic Manipulation byUltrasonic Phased Arrays.PLOS one,9(5),1-5.】。在这些现有技术中,所涉及的操控微粒系统,虽然比已往技术有了一些进步,但在操控微粒时所处的介质也是均匀介质。而在非均匀介质内,操控微粒仍很难实现。这是由于非均匀介质对声波存在复杂的散射和折射,难以使换能器直接发射声场直接定点形成聚焦场、涡旋场等声场,难以产生操控微粒的声学势阱。这样极大地限制了声操控应用领域的范围。 有鉴于此,需要开发一种新的技术来克服这些缺陷。 发明内容 针对上述现有技术的不足,本发明提出了一种基于时间反转技术操控微粒的系统与方法,以实现在非均匀介质中的任意路径对微粒进行操控。 一方面,本发明提供了一种基于时间反转技术操控微粒的系统,其可以包括:阵列探头、点源、信号接收与发射控制装置以及上位机,其中,所述阵列探头由单阵元或多阵元组成,所述阵列探头和所述信号接收与发射控制装置能通信地连接,所述信号接收与发射控制装置与所述上位机能通信地连接,所述上位机能对其接收到的信号(优选声波信号)进行时间反转处理。另一方面,本发明还可以利用数值计算方法(如时域有限差分方法FDTD)模拟虚拟点源的信号在全空间中(均匀或非均匀介质)的传播,然后将虚拟探测点(探测阵列探头位置)接收到的声波信号进行时间反转(并行适当的信号处理),输入至探测阵列探头,进行发射。这一方法尤其针对在如:超声体内定点给药,声点源无法放置在介质空间内的情形。 优选,所述阵列探头用于接收与发射信号;所述信号接收与发射控制装置用于处理和传送来自所述阵列探头接收的信号和来自上位机发射的信号;并且所述上位机是用于处理来自所述信号接收与发射控制装置
传回的信号以及发送信号。 进一步优选,所述阵列探头用于接收与发射声波信号;所述信号接收与发射控制装置用于处理和传送来自所述阵列探头接收的声波信号和来自上位机发射的指令信号;并且所述上位机是用于处理来自所述信号接收与发射控制装置传回的控制信号以及发送指令信号。 优选,所述阵列探头是一维线阵列或者是二维面阵列,可由至少一排或者更多排组成,本节验证选择4列换能器。此外,每排换能器阵列的点阵个数越多越好,这里选用22*22阵列的点阵换能器,所述阵列探头形状是平面形或者圆弧形。 本发明还提供了一种使用时间反转技术操控微粒的方法,其可以包括以下步骤:使介质中的点源沿着预设的任意路径运动并发射声波信号;阵列探头接收来自由所述点源发射出并穿过所述非均匀介质的所述声波信号,且将所述声波信号依次传送到如上所述的信号接收与发射控制装置和上位机;所述上位机将接收到的所述声波信号进行时间反转处理;使所述阵列探头发射经处理后的所述声波信号;微粒将沿着预设的路径(点源运动的路径)运动。 进而言之,一种使用时间反转技术操控微粒的方法可以包括以下步骤:使上位机接收来自点源的声波信号;所述上位机将接收到的所述声波信号进行时间反转处理;将经时间反转处理后的所述声波信号发送至阵列探头;使所述阵列探头向介质中发射经时间反转处理后的所述声波信号;并且使位于在所述点源的位置(优选点源的初始位置)的微粒沿着所述点源运动的轨迹运动。所述点源可以为物理点源,并且所述方法可以相应地包括以下步骤:使介质中的所述物理点源沿着微粒将运动经过的路径运动并发射声波信号;所述阵列探头接收来自由运动中的所述物理点源发射出并穿过所述非均匀介质的所述声波信号,且将所述声波信号依次传送到如上所述的信号接收与发射控制装置和上位机;所述上位机将接收到的所述声波信号进行时间反转处理;将经时间反转处理后的所述声波信号发送至阵列探头;使所述阵列探头向介质中发射经时间反转处理后的所述声波信号;并且使位于在所述物理点源的位置(优选物理点源的初始位置)的微粒沿着所述物理
点源运动的轨迹运动。所述点源也可以为虚拟点源,并且所述方法可以相应地包括以下步骤:利用数值计算方法模拟所述虚拟点源在具有均匀或非均匀介质的全空间中运动并模拟所述虚拟点源发出声波信号;模拟所述阵列探头接收该声波信号,并将该声波信号输入所述上位机中;所述上位机将接收到的所述声波信号进行时间反转处理;使所述阵列探头发射经处理后的所述声波信号;并且使位于在所述虚拟点源的位置(优选虚拟点源的初始位置)的微粒沿着所述虚拟点源运动的轨迹运动。 优选,在所述方法中,所述时间反转处理为将先接收到的所述声波信号后发射,而将后接收到的所述声波信号先发射。 优选,在所述方法中,在所述阵列探头发射的所述声波信号在所述点源位置处聚焦并形成声学势阱时,对所述微粒进行捕获、操控。 优选,在所述方法中,所述点源为连续移动点源,而所述介质为均匀介质或者非均匀介质。所述方法还可以包括操控所述微粒在介质中的运动路径或者操控所述介质中的任意路径上的微粒 优选,在所述方法中,所述阵列探头共振频率介于1KHz-500MHz之间,优选介于20KHz-50MHz之间。 优选,在所述方法中,所述微粒为泡沫球,所述阵列探头共振频率为40KHz。 声学时间反转技术是一种具有独特优点的自适应聚焦方法,不论介质和阵列探头的状况如何,在不需要先验知识(如媒质的密度、声速、衰减系数等参数的空间分布,探头传递函数)的情况下,可实现自适应聚焦。聚焦处形成操控微粒的声学势阱,微粒在声学势阱附近会被捕获。因此采用声学时间反转技术可在非均匀介质中聚焦并操控微粒。所以,采用声学时间反转技术的本发明克服了目前声操控装置不能在非均匀介质内任意路径操控微粒的限制。采用该专利中提到的声学时间反转技术,并结合电子系统,实现在任意介质(包括均匀介质或非均匀介质)内,在任意路径上操控微粒。从而实现声操控器件在诸如体内定点给药、生殖医学等领域内的应用,具有重要的实用价值。
图1是基于时间反转技术操控微粒的系统内的组件的连接示意图。 图2是基于时间反转技术操控微粒的方法的流程图。 图3是基于时间反转技术的操控微粒系统接收信号的示意图。 图4是基于时间反转技术的操控微粒系统发射信号的示意图。 图5为聚焦点的声压力场图。 图6为基于时间反转技术的实验装置图。 图7为基于时间反转技术操控微粒的实验结果图。 下面结合附图对本发明的具体实施例进行说明。在下文所描述的本发明的具体实施例中,为了能更好地理解本发明而描述了一些很具体的技术特征,但显而易见的是,对于本领域的技术人员来说,并不是所有的这些技术特征都是实现本发明的必要技术特征。下文所描述的本发明的一些具体实施例只是本发明的一些示例性的具体实施例,其不应被视为对本发明的限制。另外,为了避免使本发明变得难以理解,对于一些公知的技术没有进行描述。 图1是基于时间反转技术操控微粒的系统内的组件的连接示意图。标号101a-d表示围成方形的4排阵列探头,每排阵列探头个数为22*22个。标号102表示信号接收与发射控制装置,标号103表示上位机。4排阵列探头各自和信号接收与发射控制装置能通信地连接,信号接收与发射控制装置进而与上位机能通信地连接。阵列探头接收与发射声波信号;信号接收与发射控制装置处理和传送来自阵列探头接收和上位机发射的电子信号;上位机下发信号指令与处理来自所述信号接收与发射控制装置传回的控制信号。在另一个实施例中,阵列探头为布置成六边形的6排。在又一个实施例中,阵列探头为布置成八边形的8排。在又一实施例中,阵列探头是弧
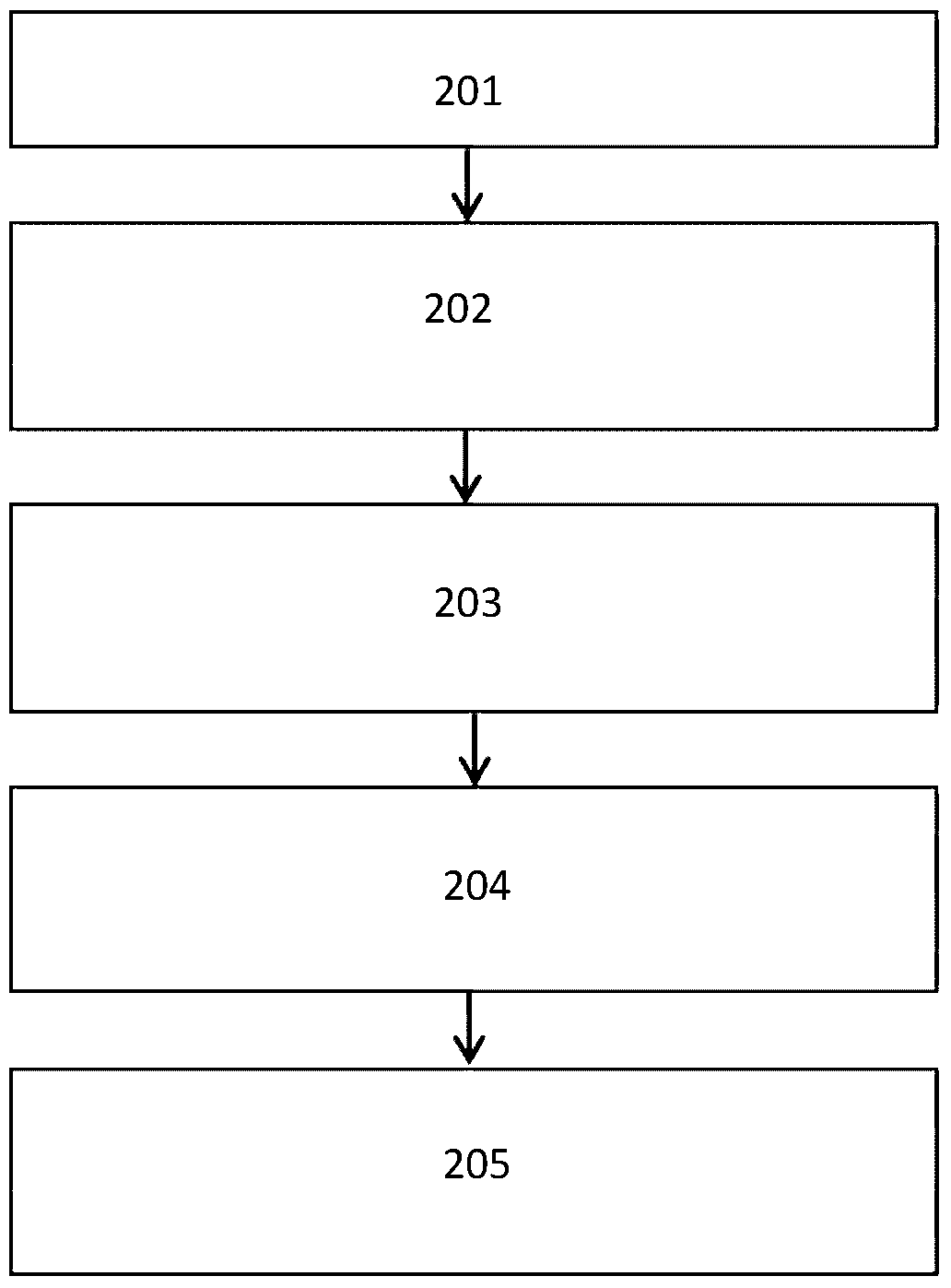
形的,并且围成圆形。 图2是基于时间反转技术操控微粒的方法的流程图。在一种实施例中,该方法在非均匀介质中进行,并且包括步骤201-205。在步骤201中,在非均匀介质中放置物理点源,使所述物理点源主动发射声波信号。在步骤202中,阵列探头接收到来自由所述物理点源发射出并穿过所述非均匀介质的所述声波信号,且使所述声波信号上传到控制系统和上位机界面。在步骤203中,使所述上位机将接收到的所述声波信号进行时间反转处理。在步骤204中,使探头阵列发射经过时间反转处理后的所述声波信号。并且,在步骤205中,监控所述物理点源位置处微粒的运动轨迹。其中所述非均匀介质为密度不同的介质(可以理解为操控空间内有障碍物、人体组织或胶状液体等),所述物理点源为小于波长的针式探头,其发射的声场近似为点源声场。在另一实施例中,所述介质为均匀介质,即空气。 在这两种实施例中,都可以对微粒进行捕获、操控。这是由于面阵列探头发射的声学信号会在声源位置处聚焦,能形成声学势阱。在非均匀介质中,任意地连续移动点源,探头阵列连续不断地接收信号,并把接收到的信号全部上传到上位机上。上位机存储信号后并对信号进行处理,把先接收到的信号后发射,后接收到的信号先发射。这样声波同样会在非均匀介质中移动聚焦,形成移动的声学势阱。因此,可以对微粒进行任意路径的操控。 在另一实施例(未图示)中,基于时间反转技术操控微粒的方法中所使用的点源为虚拟点源,并且该方法包括以下步骤:(1)利用时域有限差分方法FDTD分别模拟所述虚拟点源在具有均匀和非均匀介质的全空间中运动并模拟所述虚拟点源发出声波信号;(2)模拟所述阵列探头接收该声波信号,并将该声波信号输入所述上位机中;(3)所述上位机将接收到的所述声波信号进行时间反转处理;(4)使所述阵列探头发射经处理后的所述声波信号;并且(5)使位于在虚拟点源初始位置的微粒沿着所述虚拟点源运动的轨迹运动。该实施例中所述的方法对于超声体内定点给药且声点源无法放置在介质空间内的情形特别有效,具有很强的实用性。 图3是基于时间反转技术的操控微粒系统接收信号的示意
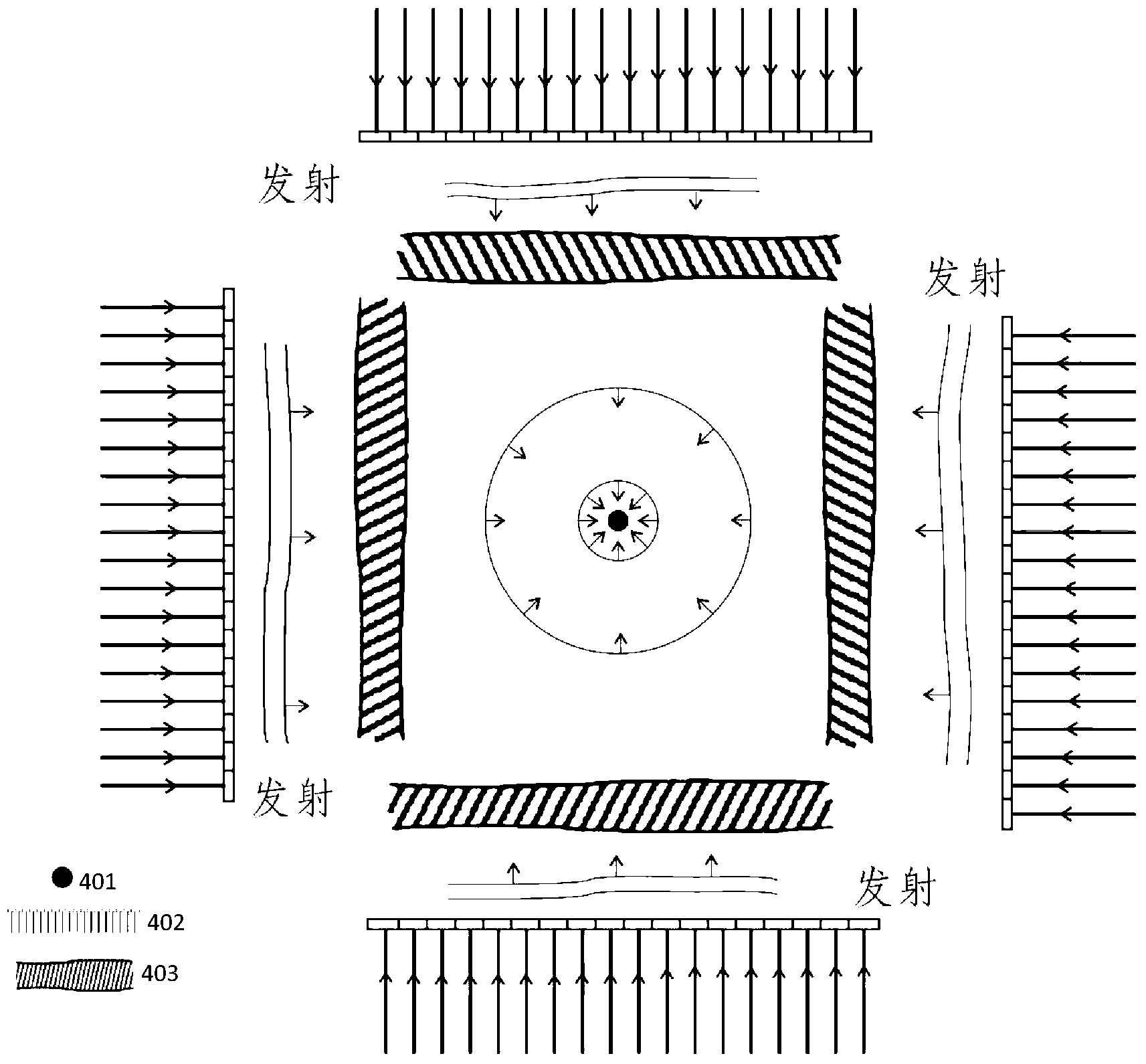
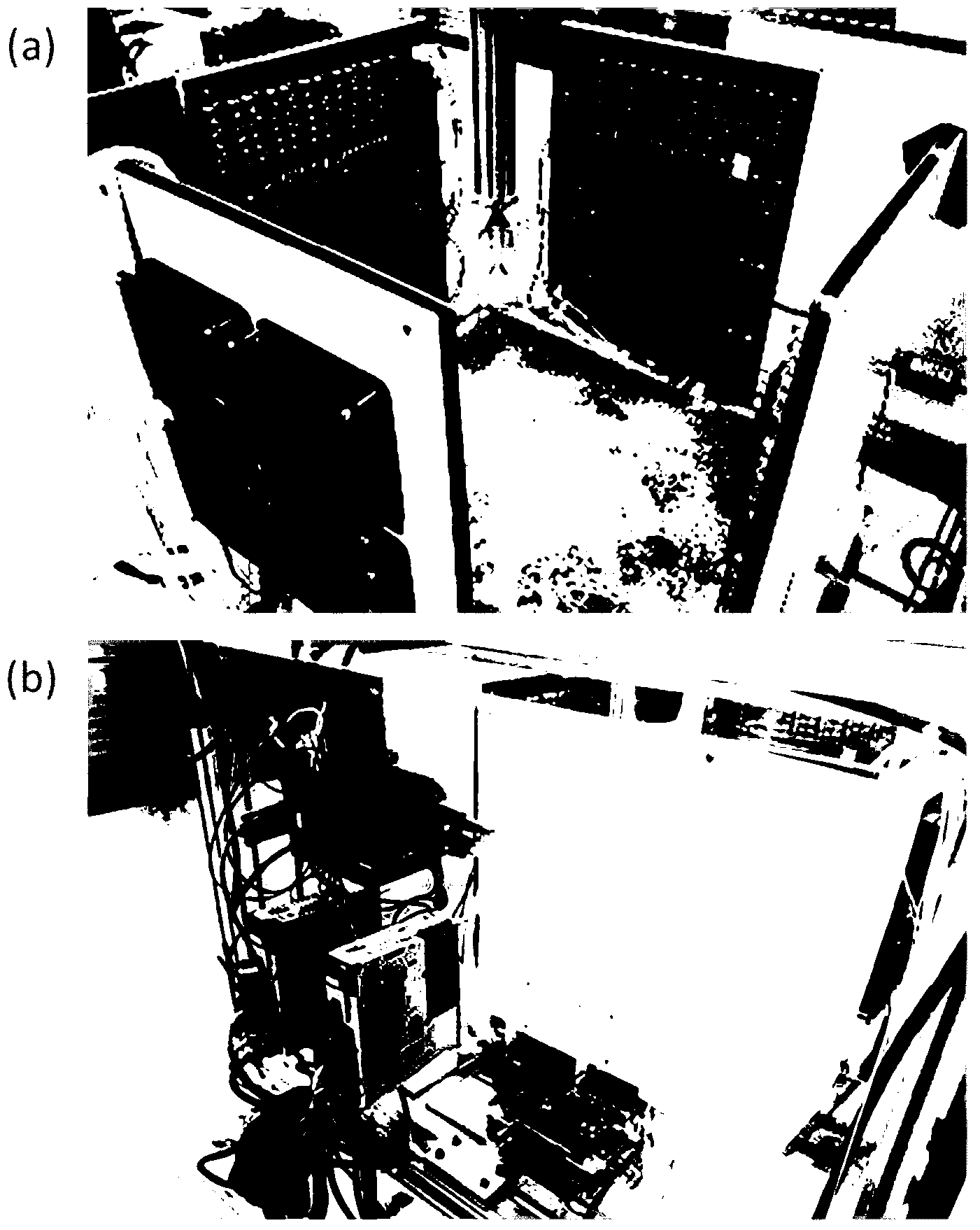
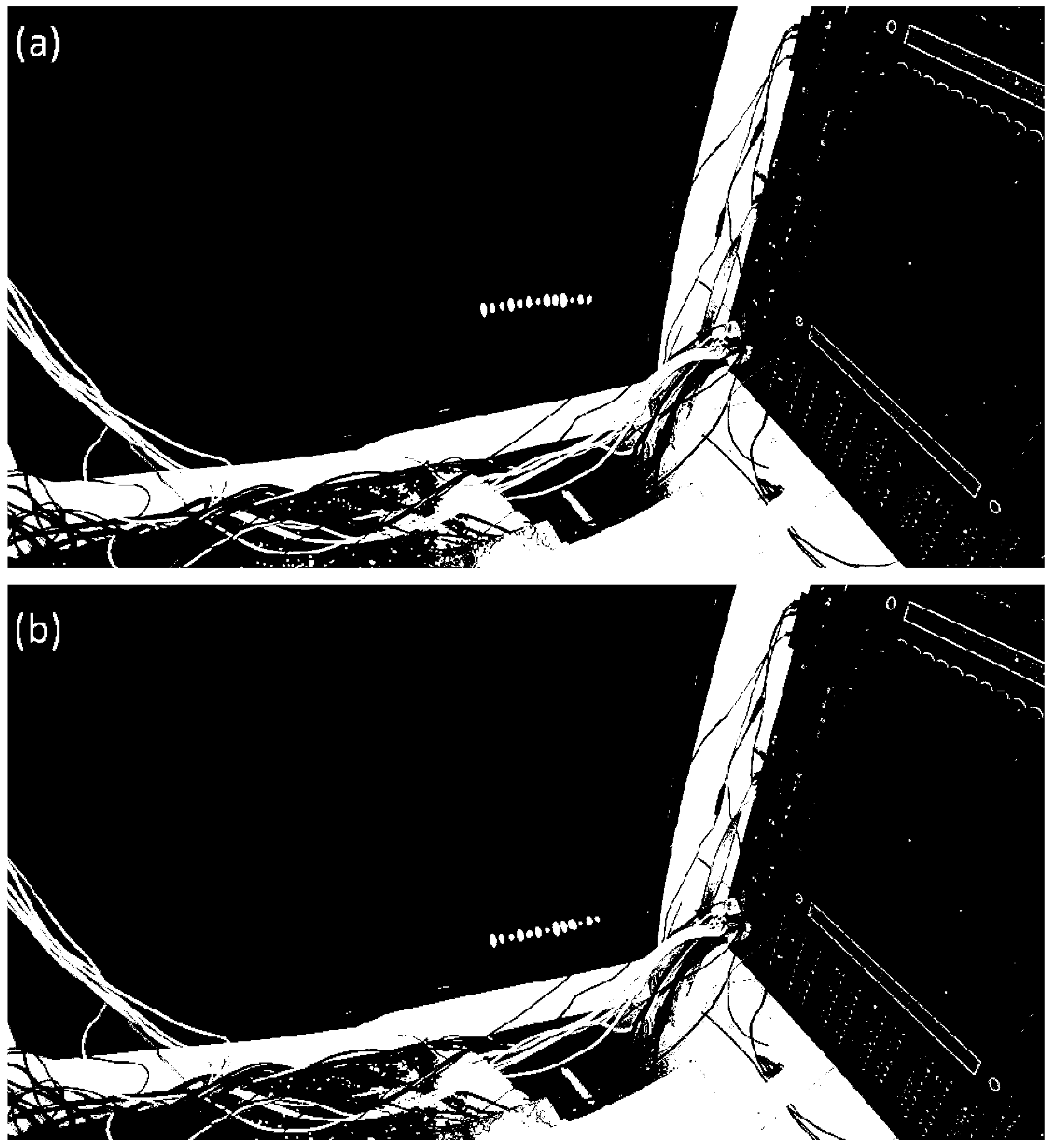
图。其中,标号301表示点源。标号302是从超声阵列探头中截取的一部分的示意图。标号303是非均匀介质(在另一实施例中为均匀介质)的一部分的示意图。如图所示,声波信号从点源沿箭头所示方向向四周发出,穿过非均匀介质,并到达超声阵列探头。然后超声阵列探头将接收到的声波信号发送至接收和发射控制装置(未示出,参见图1中的102)。接着,接收和发射控制装置将声波信号发送至上位机(未示出,参见图1中的103)。 图4是基于时间反转技术的操控微粒系统发射信号的示意图。其中,标号401表示点源。标号402是从超声阵列探头中截取的一部分的示意图。标号403是非均匀介质的一部分的示意图。如参照图3所描述的,从点源发出的声波信号经由非均匀介质、超声阵列探头、以及接收和发射控制装置到达上位机。上位机将接收到的声波信号进行时间反转处理,即,将先接收到的信号后发射,后接收到的信号先发射。从上位机发射的信号沿与其接收信号的方向相反的方向传送至声波颗粒,即经由接收和发射控制装置、超声阵列探头、非均匀介质并到达点源。在这期间,由于微粒发出的声波同样会在非均匀介质(或均匀介质)中移动聚焦,因而可以结合电子系统(未示出),实现在任意介质(包括均匀介质或非均匀介质)内,在任意路径上操控微粒。 图5为聚焦点的声压力场图。其为采用时间反转技术,经过数值计算模拟得到聚焦声场。图中的仿真结果,只使用了单排线阵列探头,声场从底部向上入射,声场四周为吸收射边界条件,图中颜色的深浅代表声场强度的大小,颜色越深,表示声场越强。 图6为基于时间反转技术的实验装置图。图7为基于时间反转技术操控微粒的实验结果图。 结合图5、6、7所示的结果,从理论与实验角度验证了本发明方案可行。实验中,发明人采用4个两两相对的22*22二维面阵列探头操控微粒,探头的中心频率是40KHz。图6(a)中有二维面阵列探头,图6(b)中表示信号接收与发射控制系统。首先在操控空间里(含非均匀介质)放置一个点声源发射声波,4个二维面阵列探头接收到声波信号以后,对声波信号进行信号处理,然后对每个探头接收到的信号进行时间反转并发射处理过的
信号,也就是先接收的信号后发射,后接收的信号先发射。最终会在声源点处聚焦,形成声学势阱,捕获微粒。若调节相位,可以在任意路径上聚焦,形成声学势阱,实现对微粒在任意路径上的操控。实验结果如图7所示。图7(a)表示被捕获的泡沫圆球悬浮在空气中,并在相对于整个空间上方的位置;图7(b)表示被捕获的泡沫圆球悬浮在空气中,并在相对于整个空间下方的位置。因此,实验表明,本发明可以做到对泡沫圆球在全空间内任意路径上操控微粒。 应注意,本发明所述的基于时间反转技术操控微粒系统是指可以对声波信号接收与发射调控的任意系统。操控微粒时用到的探头共振频率不限于40KHz,可以根据具体条件与要求选择需要微粒操控的任意频率。所述操控微粒不限于泡沫球,可以是任意直径、任意材料、任意形状的微粒。阵列探头具体阵元数目不限,可以是一维线阵列或者是二维面阵列,其形状除平面外,也可以是圆弧形或者其他合适的形状。 尽管已经根据优选的实施方案对本发明进行了说明,但是存在落入本发明范围之内的改动、置换以及各种替代等同方案。还应当注意的是,存在多种实现本发明的方法和系统的可选方式。因此,意在将随附的权利要求书解释为包含落在本发明的主旨和范围之内的所有这些改动、置换以及各种替代等同方案。
A time reversal technique-based system and method for manipulating particles, the goal being the implementation of arbitrary path manipulation with respect to particles in an inhomogeneous medium. The time reversal technique-based system for manipulating particles comprises: array probes (101a-d), a signal reception and transmission control device (102), and a host machine (103), the array probes (101a-d) being communicatively connected to the signal reception and transmission control device (102), and the signal reception and transmission control device (102) being communicatively connected to the host machine (103). Applications are in the fields such as in vivo site-specific medicament administration and reproductive medicine, and high practical value is provided. 一种基于时间反转技术操控微粒的系统,其特征在于包括: 阵列探头,点源, 信号接收与发射控制装置,以及 上位机,其能对所接收到的信号进行时间反转处理, 其中,所述阵列探头和所述信号接收与发射控制装置能通信地连接,所述信号接收与发射控制装置与所述上位机能通信地连接。 根据权利要求1所述的系统,其特征在于, 所述阵列探头用于接收与发射信号; 所述信号接收与发射控制装置用于处理和传送来自所述阵列探头接收的信号和来自上位机发射的信号;并且 所述上位机是用于处理来自所述信号接收与发射控制装置传回的信号以及发送信号。 根据权利要求2所述的系统,其特征在于, 所述阵列探头用于接收与发射声波信号; 所述信号接收与发射控制装置用于处理和传送来自所述阵列探头接收的声波信号和来自上位机发射的指令信号;并且 所述上位机是用于处理来自所述信号接收与发射控制装置传回的控制信号以及发送指令信号。 根据权利要求1-3中任一项所述的系统,其特征在于,所述阵列探头是一维线阵列或者是二维面阵列,由至少一排阵元或者更多个阵元组成,所述阵列探头组成形状为平面或者圆弧形。 一种使用时间反转技术操控微粒的方法,其特征在于,包括以下步骤: 上位机接收来自在介质中运动的点源的声波信号;
所述上位机将接收到的所述声波信号进行时间反转处理; 将经时间反转处理后的所述声波信号发送至阵列探头; 使所述阵列探头向所述介质中发射经时间反转处理后的所述声波信号;并且 使位于所述点源的位置的微粒沿着所述点源运动的轨迹运动。 根据权利要求5所述的方法,其特征在于,所述点源为物理点源,并且还包括以下步骤: 使介质中的所述物理点源沿着微粒将运动经过的路径运动并发射声波信号; 所述阵列探头接收来自由运动中的所述物理点源发射出并穿过所述非均匀介质的所述声波信号,且将所述声波信号依次传送到根据权利要求1-4中任一项所述的信号接收与发射控制装置和上位机。 根据权利要求5所述的方法,其特征在于,所述点源为虚拟点源,并且还包括以下步骤: 利用数值计算方法模拟所述虚拟点源在具有均匀或非均匀介质的全空间中运动并模拟其发出声波信号; 模拟所述阵列探头接收该声波信号,并将该声波信号输入所述上位机中。 根据权利要求5、6或7所述的方法,其特征在于,所述时间反转处理为将先接收到的所述声波信号后发射,而将后接收到的所述声波信号先发射。 根据权利要求5、6或7所述的方法,其特征在于,还包括:在所述阵列探头发射的所述声波信号在所述点源位置处聚焦并形成声学势阱时,捕获所述微粒。
根据权利要求5,6或7所述的方法,其特征在于,所述阵列探头的共振频率介于1KHz-500MHz之间,其中所述点源的位置为所述点源的初始位置。
技术领域
背景技术
附图说明
具体实施方式