AUTOMOBILE ELECTRO-HYDRAULIC INTELLIGENT STEERING SYSTEM AND MULTI-OBJECTIVE OPTIMIZATION METHOD THEREFOR
本发明属于汽车转向系统技术领域,具体指代一种汽车电液智能转向系统及其多目标优化方法。 汽车转向系统从机械化,逐渐向液压化、电子化发展,不仅减轻了驾驶员的操纵负担,获得舒适的驾驶感觉,还降低了转向能耗,增强了驾驶安全性。现有汽车转向系统中,应用最多的是电动液压助力转向系统和电动助力转向系统。电动液压助力转向系统仍存在液压系统固有的能量损失导致转向能耗较高,电动助力转向具备较好的节能特性,但高速路感不如液压转向,且受限于电机功率不适用于前轴载荷较大的车辆。因此,不管是电动液压助力转向还是电动助力转向,都难以兼顾良好的路感、充分的助力和较低的能耗。 融合电动液压助力和电动助力的优势,采用电液复合转向系统是一个发展的方向。例如中国专利申请号为CN201721192203.0,名称“一种双转向助力系统”中公开采用两个助力转向系统的布置,实现纯电动客车的大功率转向助力需求;中国专利申请号为CN201710587904.2,名称“一种电液混合式无人驾驶汽车转向系统”中公开电动助力主动控制,液压助力随动转向的方案,解决了转向迟滞性的问题。中国专利申请号为CN201610050308.6,名称“一种用于商用车的电动液压转向装置”中公开采用电动助力和液压助力同时工作,获得较好的节能型并满足应急情转向的安全性。以上专利申请提出的电液复合转向,只是简单地进行转向助力的叠加,不能够根据驾驶员风格和实际道路信息智能地协调电动液压助力和电动助力之间的比例关系,既没有考虑转向路感、转向能耗等多个转向性能之间的耦合,也没有涉及电动助力和液压助力之间复杂的机电液耦合关系及其参数优化设计方案。 因此,提出一种汽车电液智能转向系统,并进行合理的多目标参数优化设计,解决目前不能够智能协调电动助力转向和电动液压助力转向的缺陷,有助于汽车转向系统的开发应用,具有一定的市场价值。 发明内容 针对于上述现有技术的不足,本发明的目的在于提供一种汽车电液智能转向系统其多目标优化方法,以克服现有技术中存在的问题。本发明通过提出一种融合电动助力转向和电动液压助力转向的电液智能转向系统,并考虑机电液耦合关系进行多目标优化,解决了汽车转向系统难以同时兼顾较低的能耗、充足的助力、合适的路感的问题。 为达到上述目的,本发明采用的技术方案如下: 本发明的一种汽车电液智能转向系统,包括:机械转向模块、电动助力模块、电动液压助力模块和控制模块; 所述机械转向模块包括依序连接的方向盘,扭杆,下管柱,转向小齿轮,转向齿条,车轮单元; 所述电动助力模块包括助力电机及蜗轮蜗杆减速器;助力电机的输出端连接蜗轮蜗杆减速器,蜗轮蜗杆减速器作用在扭杆和下管柱之间,将电动助力力矩与驾驶员力矩在下管柱进行叠加; 所述电动液压助力模块包括油箱,油泵电机,油泵,换向阀,活塞,液压缸;活塞位于液压缸内并将其分为左右两侧,液压缸两侧分别与换向阀油路导通;油泵电机输出端连接油泵,油泵将液压油从油箱传递至换向阀中,分配至液压缸的两侧; 所述控制模块包括主控制器、传感器组、驾驶员数据库、道路信息数据库; 主控制器输入端和所述传感器组电气连接,输出端分别与助力电机、油泵电机、换向阀电气连接; 传感器组包括转矩传感器、转角传感器、位移传感器、车速传感器、摄像头、GPS接收机;转角传感器安装在下管柱上,接收下管柱的转角信号;转矩传感器安装在扭杆上,接收驾驶员输入的转矩信号;位移传感器安装在转向齿条末端,接收液压缸输出的位移信号;GPS接收机、摄像头、车速传感器安装在汽车上; 驾驶员数据库与主控制器电气连接,其用于储存当前汽车驾驶员的驾驶数据及离线方式下载的多种驾驶员数据模型,并通过数据对比,选择符合当前驾驶员驾驶风格的数据模型,并向主控制器传输; 道路信息数据库与主控制器电气连接,存储通过离线方式下载的道路信息,并连接GPS接收机,实时向主控制器传输当前道路信息。 进一步地,所述液压缸与下管柱的末端固定连接,转向齿条同轴安装在液压缸内侧,且转向齿条位于液压缸内的部分上同轴固定安装活塞;转向齿条轴向向右侧伸出液压缸的部分与转向小齿轮啮合,转向小齿轮将驾驶员力矩和电动助力力矩的合力矩传递至转向齿条并转换为齿条力,齿条力与液压缸两侧的压力差产生的液压助力进行叠加并输出,转向齿条两侧输出端连接车轮单元。 进一步地,主控制器分别通过传感器组的各个输入信号判断当前车辆状态,通过驾驶员数据库的输入信号判断当前驾驶员的驾驶风格,通过道路信息数据库的输入信号判断并当前道路信息并预测转向需求,综合上述信息进行转向决策,输出相应的电动助力信号、电动液压助力信号、换向阀控制信号,分别控制助力电机、油泵电机和换向阀的工作,调整电动助力模块和电动液压助力模块参与转向助力的比例。 进一步地,通过驾驶员数据库输入的信号,提取当前驾驶员的转向操作特征,包括转向速率大小、转向时滞大小、转向幅值大小;将提取的特征数据与离线驾驶员数据模型进行对比,选择相似度最高的一种,判定为当前驾驶员的驾驶风格。 进一步地,道路信息数据库接收GPS信号,获取车辆实时的位置信息,与离线的道路信息进行对应,获取车辆实时的道路信息,并根据道路信息中的弯道分布、弯道曲率、弯道长度的信息预测车辆转向需求。 本发明的一种汽车电液智能转向系统的多目标优化方法,基于上述系统,包括步骤如下: 步骤1:初始化电液转向系统参数,并在多学科建模软件AMEsim中建立电液转向系统仿真模型; 步骤2:分析电液转向系统的转向能耗、转向路感和回正误差; 步骤3:分析电液转向系统机械、液压、电子参数之间的耦合关系; 步骤4:根据上述步骤2和步骤3的分析结果,选择扭杆刚度Ks,小齿轮半径Rp,蜗轮蜗杆减速器减速比G,活塞横截面积Ap,换向阀阀口面积增益Ka为设计变量,采用AMEsim软件的AMEpilot模块输出设计变量; 步骤5:设定目标函数为转向能耗、转向路感、回正误差,约束条件为设计变量取值范围,建立电液转向系统优化模型; 步骤6:采用基于共享小生境技术的多目标粒子群算法,进行电液转向系统多目标优化求解; 步骤7:得到优化结果,将优化后的设计变量输入Amesim软件,验证优化效果。 进一步地,所述步骤6基于共享小生境技术的多目标粒子群算法具体包括: 步骤61:根据电液转向系统优化模型,建立粒子群模型并进行算法参数定义,采用设计变量初值对粒子群进行初始化; 步骤62:在给定解空间范围内,初始化粒子群位置、速度信息; 步骤63:在解空间范围内,更新粒子群位置、速度信息,产生新种群,调整个体历史最优位置; 步骤64:计算各粒子的适应度值,找出初始全局最优位置,将求出的非劣解加入外部存储集合Ar中; 步骤65:计算各粒子的转向能耗、转向路感、回正误差的目标函数值,并选择各个粒子的全局最优位置,采用擂台赛法选择当前状态下新的非劣解,利用新的非劣解更新外部储存集合Ar; 步骤66:判断外部存储集合Ar是否装满,若未装满则调整全局最优位置,若装满则首先执行基于共享机制的小生境维护策略,保证粒子群多样性和均匀性,再调整全局最优位置; 步骤67:循环步骤63-66,直到达到最大迭代次数或收敛时停止,输出电液转向系统优化结果。 进一步地,所述步骤66的基于共享机制的小生境维护策略,采用共享函数调节小生境个体的适应度,具体步骤如下: 步骤661:初始化算法,建立初始种群,初始化参数; 步骤662:计算个体适应度,执行遗传算法的选择、交叉、变异等操作; 步骤663:计算个体共享度,并根据个体共享度更新个体的适应度; 步骤664:比较子代和父代的适应度大小,并用适应度较大的子代个体代替父代个体,产生新种群; 步骤665:若满足终止条件,则退出算法,完成小生境维护策略,否则返回662。 进一步地,所述步骤663中个体共享度的计算公式为: 式中,share(dij)为共享度函数,dij为海明距离,σ0为小生境边界参数,λ为共享函数形状参数。
进一步地,所述步骤63更新粒子群位置和速度的公式为: vi(t)=ωvi(t-1)+c1r1(xpbest-xi)+c2r2(xgbest-xi)
xi(t)=xi(t-1)vi 式中,vi表示粒子速度,xi表示粒子位置,xpbest表示粒子的个体历史最优位置,xgbest表示粒子的全局最优位置,ω是惯性权重;r1和r2是0到1之间的随机数,c1和c2是全局增量控制系数和个体增量控制系数。
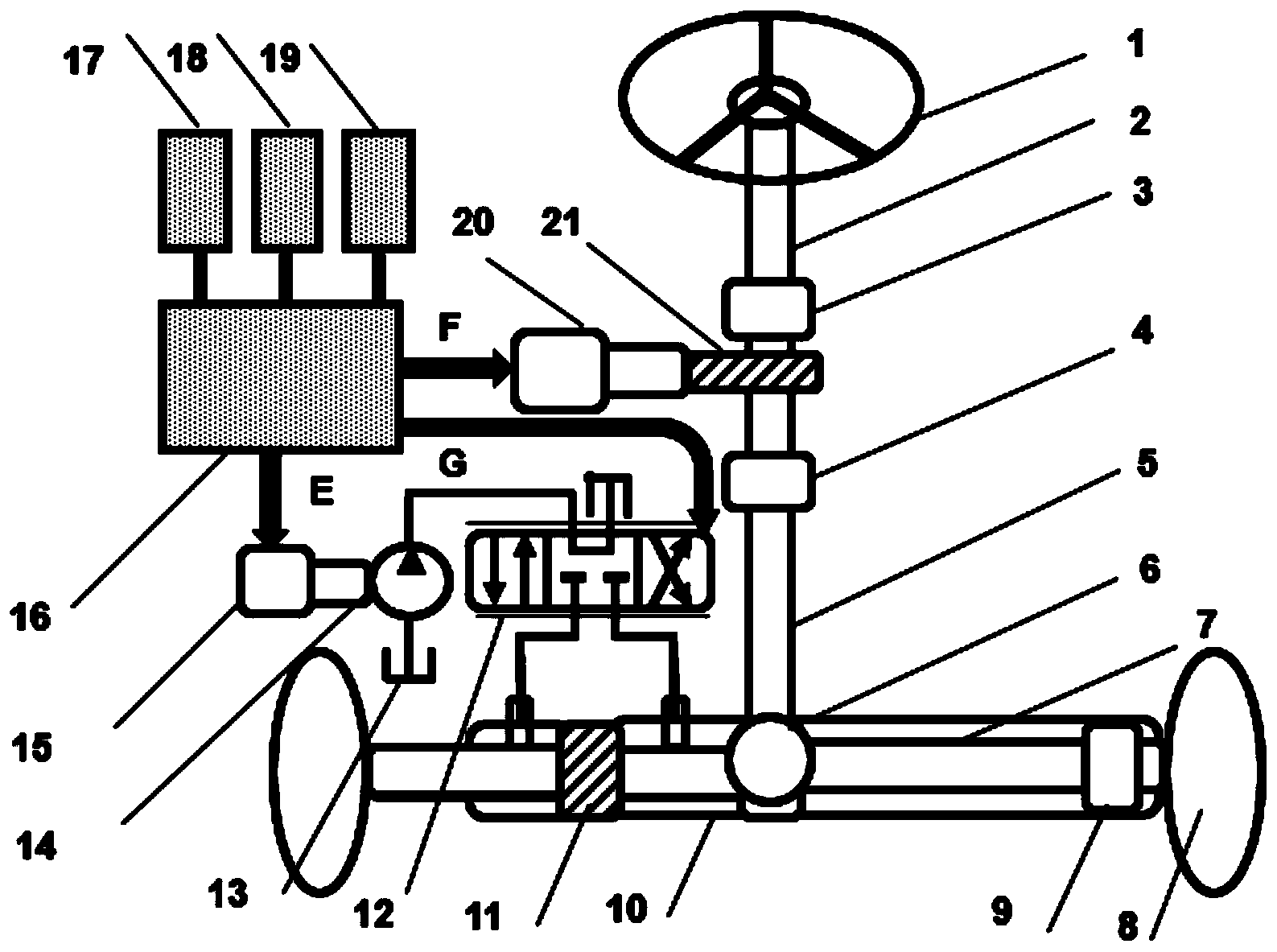
本发明的有益效果: 本发明与现有的汽车转向系统相比,融合电动助力和电动液压助力的优势功能,能够同时获得较好的经济性、良好的驾驶感觉、充分的转向助力,并通过电动助力和电动液压助力进行安全性和可靠性的冗余备份,不仅适用于有驾驶员驾驶的汽车,也可用于无人驾驶汽车。 本发明考虑了电液转向系统中机械、电子、液压等多学科的耦合关系,通过参数耦合分析确定关键设计变量,采用基于共享小生境技术的多目标粒子群算法进行优化,收敛性较好,容易得到全局最优从而能够获得良好的整体转向性能。 图1为本发明汽车电液智能转向系统原理结构框图; 图2为本发明方法多目标优化流程图; 图3为本发明基于共享小生境技术的多目标粒子群算法流程图; 图4为本发明转向路感优化历程图; 图5为本发明回正误差优化历程图; 图6为本发明转向能耗优化历程图; 图中,1-方向盘,2-扭杆,3-转矩传感器,4-转角传感器,5-下管柱,6-转向小齿轮,7-转向齿条,8-车轮单元,9-位移传感器,10-液压缸,11-活塞,12-换向阀,13-油箱,14-油泵,15-油泵电机,16-主控制器,17-传感器组,18-驾驶员数据库,19-道路信息数据库,20-助力电机,21-蜗轮蜗杆减速器,E-电动液压助力信号,F-电动助力信号,G-换向阀信号。 为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。 参照图1所示,本发明的一种汽车电液智能转向系统,包括:机械转向模块、电动助力模块、电动液压助力模块和控制模块; 所述机械转向模块包括依序连接的方向盘1、扭杆2、下管柱5,转向小齿轮6,转向齿条7,车轮单元8; 所述电动助力模块包括助力电机20及蜗轮蜗杆减速器21;助力电机20的输出端连接蜗轮蜗杆减速器21,蜗轮蜗杆减速器作用在扭杆2和下管柱5之间,将电动助力力矩与驾驶员力矩在下管柱5进行叠加; 所述电动液压助力模块包括油箱13,油泵电机15,油泵14,换向阀12,活塞11,液压缸10;活塞位于液压缸内并将其分为左右两侧,液压缸两侧分别与换向阀12油路导通;油泵电机15输出端连接油泵14,油泵14将液压油从油箱13传递至换向阀12中,分配至液压缸10的两侧; 所述控制模块包括主控制器16、传感器组17、驾驶员数据库18、道路信息数据库19; 主控制器16输入端和所述传感器组17电气连接,输出端分别与助力电机20、油泵电机15、换向阀12电气连接; 传感器组包括转矩传感器3、转角传感器4、位移传感器9、车速传感器、摄像头、GPS接收机;转角传感器4安装在下管柱上,接收下管柱的转角信号;转矩传感器3安装在扭杆2上,接收驾驶员输入的转矩信号;位移传感器9安装在转向齿条7末端,接收液压缸10输出的位移信号;GPS接收机、摄像头、车速传感器安装在汽车上; 驾驶员数据库与主控制器电气连接,其用于储存当前汽车驾驶员的驾驶数据及离线方式下载的多种驾驶员数据模型,并通过数据对比,选择与当前驾驶员驾驶风格最接近数据模型,并向主控制器传输; 道路信息数据库与主控制器电气连接,存储通过离线方式下载的道路信息,并连接GPS 接收机,实时向主控制器传输当前道路信息。 其中,所述液压缸10与下管柱5的末端固定连接,转向齿条7同轴安装在液压缸10内侧,且转向齿条7位于液压缸10内的部分上同轴固定安装活塞。转向齿条轴向向右侧伸出液压缸的部分与转向小齿轮啮合,转向小齿轮将驾驶员力矩和电动助力力矩的合力矩传递至转向齿条并转换为齿条力,齿条力与液压缸两侧的压力差产生的液压助力进行叠加并输出,转向齿条两侧输出端连接车轮单元。 其中,主控制器分别通过传感器组的各个输入信号判断当前车辆状态,通过驾驶员数据库的输入信号判断当前驾驶员的驾驶风格,通过道路信息数据库的输入信号判断并当前道路信息并预测转向需求,综合上述信息进行转向决策,输出相应的电动助力信号F、电动液压助力信号E、换向阀控制信号G,分别控制助力电机、油泵电机和换向阀的工作,调整电动助力模块和电动液压助力模块参与转向助力的比例。 通过驾驶员数据库输入的信号,提取当前驾驶员的转向操作特征,包括转向速率大小、转向时滞大小、转向幅值大小;将提取的特征数据与离线驾驶员数据模型进行对比,选择相似度最高的一种,判定为当前驾驶员的驾驶风格。 道路信息数据库接收GPS信号,获取车辆实时的位置信息,与离线的道路信息进行对应,获取车辆实时的道路信息,并根据道路信息中的弯道分布、弯道曲率、弯道长度等信息预测车辆转向需求。 参照图2所示,本发明的一种汽车电液智能转向系统的多目标优化方法,基于上述系统,包括步骤如下: 步骤1:初始化电液智能转向系统参数,并在多学科建模软件AMEsim中建立电液智能转向系统仿真模型; 步骤2:分析电液智能转向系统的转向能耗、转向路感和回正误差; 步骤3:分析电液智能转向系统机械、液压、电子参数之间的耦合关系; 步骤4:根据上述步骤2和步骤3的分析结果,选择扭杆刚度Ks,小齿轮半径Rp,蜗轮蜗杆减速器减速比G,活塞横截面积Ap,换向阀阀口面积增益Ka为设计变量,采用AMEsim软件的AMEpilot模块输出设计变量; 步骤5:设定目标函数为转向能耗、转向路感、回正误差,约束条件为设计变量取值范围,建立电液智能转向系统优化模型; 步骤6:采用基于共享小生境技术的多目标粒子群算法,进行电液智能转向系统多目标优化求解; 步骤7:得到优化结果,将优化后的设计变量输入Amesim软件,验证优化效果。 示例中,设定仿真时间20秒,在3-18秒内执行连续3次相同且方向盘转角为±120°的转向操作,其余时间内方向盘没有输入;分析电液智能转向系统的转向能耗、转向路感和回 正误差。其中转向能耗包括3-18秒内机械转向模块、电动助力模块、电动液压助力模块的能量损耗,转向路感通过3-18秒扭杆作用力的峰值和波动情况衡量,回正误差通过方向盘在第19秒的位置进行分析。 分别改变系统中机械、液压、电子参数的取值,判断参数对转向能耗、转向路感和回正误差三个性能的影响,分析电液智能转向系统机械、液压、电子参数之间的耦合关系。 约束条件为设计变量取值范围,如表1所示: 表1 参照图3所示,所述步骤6基于共享小生境技术的多目标粒子群算法具体包括: 步骤61:根据电液智能转向系统优化模型,建立粒子群模型并进行算法参数定义,采用设计变量初值对粒子群进行初始化; 步骤62:在给定解空间范围内,初始化粒子群位置、速度信息; 步骤63:在解空间范围内,更新粒子群位置、速度信息,产生新种群,调整个体历史最优位置; 步骤64:计算各粒子的适应度值,找出初始全局最优位置,将求出的非劣解加入外部存储集合Ar中; 步骤65:计算各粒子的转向能耗、转向路感、回正误差的目标函数值,并选择各个粒子的全局最优位置,采用擂台赛法选择当前状态下新的非劣解,利用新的非劣解更新外部储存集合Ar; 步骤66:判断外部存储集合Ar是否装满,若未装满则调整全局最优位置,若装满则首先执行基于共享机制的小生境维护策略,保证粒子群多样性和均匀性,再调整全局最优位置; 步骤67:循环步骤63-66,直到达到最大迭代次数或收敛时停止,输出电液智能转向系统优化结果。 示例中,建立粒子群模型并进行算法参数定义,具体定义如表2所示: 表2 图4显示了转向路感的优化历程,横坐标为进化代数,纵坐标为转向路感的目标值。从图中看出,转向路感的目标值最低约为0.0111,最高约为0.0197,在进化代数大于100代之后,转向路感在接近0.00193附近取值最为密集; 图5显示了回正误差的优化历程,横坐标为进化代数,纵坐标为回正误差的目标值。从图中可以看出,从第1代进化到400代的过程中,回正误差取值在0.00153附近的基本保持稳定,最低值约为0.0017,最高值约为0.00158,变化趋势较为平缓; 图6反映了随着进化代数增加,转向能耗目标值的变化情况。从图中可以看出,在进化代数大于50代之后,转向能耗的取值逐渐降低,且稳定在110附近的取值点最为密集。 综合图4-6可以看出,在优化过程中,转向路感、回正误差和转向能耗的目标值是相互耦合的,且优化的变化趋势基本收敛,各目标值稳定在一定的范围内,能够满足设计需求。 本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。 An automobile electro-hydraulic intelligent steering system and a multi-objective optimization method therefor, the system comprising a mechanical steering module, an electric power assist module, an electro-hydraulic power assist module, and a control module. The system may intelligently select the proportions by which the electric power assist module and the electro-hydraulic power assist module participate in steering power assist. For the complex coupling relationship of electro-mechanical fluid in the system, a multi-objective optimization method is proposed. By means of parameter coupling analysis, key design variables that have a relatively large impact on system performance are selected, and a shared niche technology-based multi-objective particle swarm algorithm is used for optimization to obtain optimal design parameters, achieve the optimal performance of steering road feel, steering energy consumption and steering assistance, and improve the overall performance of the steering system. 一种汽车电液智能转向系统,其特征在于,包括:机械转向模块、电动助力模块、电动液压助力模块和控制模块; 所述机械转向模块包括依序连接的方向盘,扭杆,下管柱,转向小齿轮,转向齿条,车轮单元; 所述电动助力模块包括助力电机及蜗轮蜗杆减速器;助力电机的输出端连接蜗轮蜗杆减速器,蜗轮蜗杆减速器作用在扭杆和下管柱之间,将电动助力力矩与驾驶员力矩在下管柱进行叠加; 所述电动液压助力模块包括油箱,油泵电机,油泵,换向阀,活塞,液压缸;活塞位于液压缸内并将其分为左右两侧,液压缸两侧分别与换向阀油路导通;油泵电机输出端连接油泵,油泵将液压油从油箱传递至换向阀中,分配至液压缸的两侧; 所述控制模块包括主控制器、传感器组、驾驶员数据库、道路信息数据库; 主控制器输入端和所述传感器组电气连接,输出端分别与助力电机、油泵电机、换向阀电气连接; 传感器组包括转矩传感器、转角传感器、位移传感器、车速传感器、摄像头、GPS接收机;转角传感器安装在下管柱上,接收下管柱的转角信号;转矩传感器安装在扭杆上,接收驾驶员输入的转矩信号;位移传感器安装在转向齿条末端,接收液压缸输出的位移信号;GPS接收机、摄像头、车速传感器安装在汽车上; 驾驶员数据库与主控制器电气连接,其储存当前汽车驾驶员的驾驶数据及离线方式下载的多种驾驶员数据模型,并通过数据对比,选择符合当前驾驶员驾驶风格的数据模型,并向主控制器传输; 道路信息数据库与主控制器电气连接,其存储通过离线方式下载的道路信息,并连接GPS接收机,实时向主控制器传输当前道路信息。 根据权利要求1所述的汽车电液智能转向系统,其特征在于,所述液压缸与下管柱的末端固定连接,转向齿条同轴安装在液压缸内侧,且转向齿条位于液压缸内的部分上同轴固定安装活塞;转向齿条轴向向右侧伸出液压缸的部分与转向小齿轮啮合,转向小齿轮将驾驶员力矩和电动助力力矩的合力矩传递至转向齿条并转换为齿条力,齿条力与液压缸两侧的压力差产生的液压助力进行叠加并输出,转向齿条两侧输出端连接车轮单元。 根据权利要求1所述的汽车电液智能转向系统,其特征在于,所述主控制器分别通过传感器组的各个输入信号判断当前车辆状态,通过驾驶员数据库的输入信号判断当前驾驶员的驾驶风格,通过道路信息数据库的输入信号判断并当前道路信息并预测转向需求,综合上述信息进行转向决策,输出相应的电动助力信号、电动液压助力信号、换向阀控制信号,分别控制助力电机、油泵电机和换向阀的工作,调整电动助力模块和电动液压助力模块参与转向助力的比例。 根据权利要求1所述的汽车电液智能转向系统,其特征在于,通过驾驶员数据库输入的信号,提取当前驾驶员的转向操作特征,包括转向速率大小、转向时滞大小、转向幅值大小;将提取的特征数据与离线驾驶员数据模型进行对比,选择相似度最高的一种,判定为当前驾驶员的驾驶风格。 根据权利要求1所述的汽车电液智能转向系统,其特征在于,道路信息数据库接收GPS信号,获取车辆实时的位置信息,与离线的道路信息进行对应,获取车辆实时的道路信息,并根据道路信息中的弯道分布、弯道曲率、弯道长度的信息预测车辆转向需求。 一种汽车电液智能转向系统的多目标优化方法,基于上述权利要求1至5中任意一项所述的系统,其特征在于,包括步骤如下: 步骤1:初始化电液智能转向系统参数,并在多学科建模软件AMEsim中建立电液智能转向系统仿真模型; 步骤2:分析电液智能转向系统的转向能耗、转向路感和回正误差; 步骤3:分析电液智能转向系统机械、液压、电子参数之间的耦合关系; 步骤4:根据上述步骤2和步骤3的分析结果,选择扭杆刚度Ks,小齿轮半径Rp,蜗轮蜗杆减速器减速比G,活塞横截面积Ap,换向阀阀口面积增益Ka为设计变量,采用AMEsim软件的AMEpilot模块输出设计变量; 步骤5:设定目标函数为转向能耗、转向路感、回正误差,约束条件为设计变量取值范围,建立电液智能转向系统优化模型; 步骤6:采用基于共享小生境技术的多目标粒子群算法,进行电液智能转向系统多目标优化求解; 步骤7:得到优化结果,将优化后的设计变量输入Amesim软件,验证优化效果。 根据权利要求6所述的汽车电液智能转向系统的多目标优化方法,其特征在于,所述步骤6中基于共享小生境技术的多目标粒子群算法具体包括: 步骤61:根据电液智能转向系统优化模型,建立粒子群模型并进行算法参数定义,采用设计变量初值对粒子群进行初始化; 步骤62:在给定解空间范围内,初始化粒子群位置、速度信息; 步骤63:在解空间范围内,更新粒子群位置、速度信息,产生新种群,调整个体历史最优位置; 步骤64:计算各粒子的适应度值,找出初始全局最优位置,将求出的非劣解加入外部存储集合Ar中; 步骤65:计算各粒子的转向能耗、转向路感、回正误差的目标函数值,并选择各个粒子的全局最优位置,采用擂台赛法选择当前状态下新的非劣解,利用新的非劣解更新外部储存集合Ar; 步骤66:判断外部存储集合Ar是否装满,若未装满则调整全局最优位置,若装满则首先执行基于共享机制的小生境维护策略,保证粒子群多样性和均匀性,再调整全局最优位置; 步骤67:循环步骤63-66,直到达到最大迭代次数或收敛时停止,输出电液智能转向系统优化结果。 根据权利要求7所述的汽车电液智能转向系统的多目标优化方法,其特征在于,所述步骤66中的基于共享机制的小生境维护策略,采用共享函数调节小生境个体的适应度,具体步骤如下: 步骤661:初始化算法,建立初始种群,初始化参数; 步骤662:计算个体适应度,执行遗传算法的选择、交叉、变异等操作; 步骤663:计算个体共享度,并根据个体共享度更新个体的适应度; 步骤664:比较子代和父代的适应度大小,并用适应度较大的子代个体代替父代个体,产生新种群; 步骤665:若满足终止条件,则退出算法,完成小生境维护策略,否则返回662。 根据权利要求8所述的汽车电液智能转向系统的多目标优化方法,其特征在于,所述步骤663中个体共享度的计算公式为: 式中,share(dij)为共享度函数,dij为海明距离,σ0为小生境边界参数,λ为共享函数形状参数。
根据权利要求7所述的汽车电液智能转向系统的多目标优化方法,其特征在于,所述步骤63中的更新粒子群位置和速度的公式为: vi(t)=ωvi(t-1)+c1r1(xpbest-xi)+c2r2(xgbest-xi)
xi(t)=xi(t-1)vi 式中,vi表示粒子速度,xi表示粒子位置,xpbest表示粒子的个体历史最优位置,xgbest表示粒子的全局最优位置,ω是惯性权重;r1和r2是0到1之间的随机数,c1和c2是全局增量控制系数和个体增量控制系数。
技术领域
背景技术
附图说明
具体实施方式
1 扭杆刚度Ks 15 3-50 2 小齿轮半径Rp 7.5 6.5-9.5 3 蜗轮蜗杆减速器减速比G 18 15-28 4 活塞横截面积Ap 625 200-900 5 换向阀阀口面积增益Ka 0.95 0.9-1.1