Antriebssystem für ein Fahrzeug
Antriebssystem für ein Fahrzeug, umfassend:
[0001] Die vorliegende Erfindung betrifft ein Antriebssystem für ein Fahrzeug, umfassend einAntriebsaggregat, eine dem Antriebsaggregat zugeordnete Leistungsstellanordnung zum Einstellender Leistungsabgabe des Antriebsaggregats, ein Schaltgetriebe und eine im Drehmomentübertragungswegzwischen dem Antriebsaggregat und dem Schaltgetriebe angeordnete, automatisch betätigbare Reibungskupplung.
Stand der Technik
[0002] Ein derartiges Antriebssystem ist beispielsweise aus der DE 34 30 983 A1 bekannt. Beidiesem bekannten Antriebssystem wird dann, wenn das Fahrzeug in einen bestimmten Fahrzustandeintritt, d. h. ein bestimmter fahrdynamischer Zustand vorliegt, die Kupplung zwangsweise zumindestteilweise ausgerückt. Dies wird beispielsweise vorgenommen, wenn durch ein Antiblockierbremssystem dieABS-Regelung durchgeführt wird oder wenn erfaßt wird, daß das Fahrzeug in einem frei rollendenZustand ist, so daß das Ausrücken der Kupplung die Wirkung eines Freilaufs hat. Auch ist esaus dieser Druckschrift bekannt, bei Durchführung einer Antischlupfregelung die Kupplung kurzzeitigauszurücken und dadurch das Fahrverhalten zu verbessern.
[0003] Die DE 35 45 716 A1 offenbart ein Antriebssystem, bei dem zur Antischlupfregelung verschiedene Schwellenwertefür den Antriebsradschlupf definiert sind. In Abhängigkeit davon, ob bei einem Vergleich mitdiesen Schwellenwerten festgestellt wird, ob ein übermäßiger Schlupf vorliegt, oder nicht, werdenden Schlupf reduzierende Maßnahmen ergriffen. Die für diese Antischlupfregelung vorgesehenenSchlupfschwellen werden in Abhängigkeit von der bei einem Fahrzeug erfassten Querbeschleunigungeingestellt.
[0004] Die DE 36 12 170 A1 offenbart ein Antriebssystem, bei dem eine Ist-Querbeschleunigungmit einer Soll-Querbeschleunigung verglichen wird und dann, wenn zwischen diesen beiden Größenein gewisser Abstand überschritten ist, ein das Antriebsdrehmoment reduzierender Eingriff erfolgt.
Aufgabenstellung
[0005] Es ist die Aufgabe der vorliegenden Erfindung, ein Antriebssystem für ein Fahrzeug vorzusehen,bei welchem die Fahrsicherheit weiter erhöht werden kann.
[0006] Erfindungsgemäß wird diese Aufgabe gelöst durch ein Antriebssystem für ein Fahrzeug zugeordneteLeistungsstellanordnung zum Einstellen der Leistungsabgabe gemäß Anspruch 1.
[0007] Durch dieses gezielte Eingreifen in die Leistungsabgabe des Antriebsaggregats kann beiVorliegen kritischer Fahrzustände ohne jegliche zeitliche Verzögerung auf die Fahrdynamik desFahrzeugs eingewirkt werden und damit die Gefahr des Eintritts in einen unstabilen Fahrzustandausgeschlossen oder zumindest verringert werden. Durch das erfindungsgemäße Antriebssystem wirdalso dem Fahrer des Fahrzeugs die Aufgabe, bei Vorliegen kritischer Zustände, wie z. B. demplötzlichen Auftauchen eines Hindernisses vor dem Fahrzeug, richtig zu reagieren, zumindest zumTeil abgenommen.
[0008] Bei Durchführung einer Ausweichbewegung kann trotz der vorangehend angesprochenen Herunterregelungder Leistungsabgabe des Antriebsaggregats das Fahrzeug aufgrund der spontanen Lenkbewegungenbeispielsweise in einen unstabilen Fahrzustand eintreten, welcher ein Übersteuerungszustand,ein Untersteuerungszustand oder gegebenenfalls auch ein leichtes Springen des Fahrzeugs seinkann. Es ist daher bei dem erfindungsgemäßen Antriebssystem ferner eine Betriebsparameter-Bestimmungsanordnungzum Bestimmen wenigstens eines Betriebsparameters vorgesehen, welcher darauf hinweist, ob dasFahrzeug in einem stabilen Fahrzustand ist oder nicht, wobei dann, wenn der wenigstens eineBetriebsparameter in einem vorbestimmten Bereich ist, die Ansteueranordnung die Reibungskupplungzum wenigstens teilweisen Ausrücken derselben ansteuert. Es hat sich gezeigt, daß durch diesesUnterbrechen der Drehmomentübertragungsverbindung zwischen Antriebsaggregat und Schaltgetriebedas Fahrzeug ähnlich wie bei einer Antischlupfregelung schnell wieder in einen stabilen oder wenigerkritischen Fahrzustand gebracht werden kann. Dabei ist weiter von Bedeutung, daß die Ansteueranordnungdie Reibungskupplung erst dann zum wenigstens teilweisen Ausrücken ansteuert, wenn die Leistungsabgabedes Antriebsaggregats wenigstens teilweise gesenkt worden ist. Es kann somit vermieden werden,daß noch bei hoch drehendem Aggregat die Kupplung ausgerückt wird und somit die Gefahr besteht, daßmangels Widerstands das Aggregat hochdreht und dabei beschädigt wird.
[0009] Beispielsweise kann die Betriebszustandsbestimmungsanordnung dazu ausgebildet sein, dieQuerbeschleunigung und die zeitliche Änderung der Querbeschleunigung zu bestimmen, und in diesemFalle ist der bestimmte Betriebszustand durch die Querbeschleunigung und deren zeitliche Änderungwiedergegeben. Die Querbeschleunigung ist ein Parameter, welcher in engem Zusammenhang mit derFahrstabilität des Fahrzeugs steht. Das heißt, beruhend auf der Querbeschleunigung beziehungsweiseder zeitlichen Änderung derselben kann mit sehr guter Genauigkeit darauf geschlossen werden, obdas Fahrzeug in einen kritischen Zustand eintritt oder ob die Querbeschleunigung beispielsweiseeine bei Fahrt mit hoher Geschwindigkeit auf engem Radius normalerweise zu erwartende Querbeschleunigungist.
[0010] Vorzugsweise ist die Ansteueranordnung dazu ausgebildet, dann, wenn die Querbeschleunigung beziehungsweiseein Absolutbetrag derselben einen ersten vorbestimmten Schwellenwert, vorzugsweise im Bereichvon 0,7 g, überschreitet und die zeitliche Änderung der Querbeschleunigung beziehungsweise einAbsolutbetrag derselben einen zweiten vorbestimmten Schwellenwert überschreitet, die Leistungsstellanordnung zumVerringern der Leistungsabgabe des Antriebsaggregats anzusteuern. Es kann somit bei Eintrittin den bestimmten Fahrzustand durch die erfolgte Leistungsverringerung der Brennkraftmaschinespontan Nutzen aus dem auftretenden Motorbremseffekt gezogen werden.
[0011] Dabei kann vorgesehen sein, daß die Ansteueranordnung die Leistungsstellanordnung zumVerringern der Leistungsabgabe des Antriebsaggregats auf einen minimalen Wert oder auf einenvon der erfaßten Querbeschleunigung oder/und deren zeitlicher Änderung abhängigen Wert ansteuert.
[0012] Um nach Beendigung beispielsweise eines kritischen Fahrzustands wieder in einen normalenBetrieb überzugehen, wird vorgeschlagen, daß die Ansteueranordnung nach Rückkehr der Querbeschleunigungund der zeitlichen Änderung derselben in den Bereich des ersten vorbestimmten Schwellenwertsbeziehungsweise des zweiten vorbestimmten Schwellenwerts die Leistungsstellanordnung zum Erhöhender Leistungsabgabe, vorzugsweise auf den vor der Absenkung vorliegenden Wert, ansteuert. Eswird darauf hingewiesen, daß hier eine bestimmte Hysteresefunktion integriert werden kann, umbei lediglich geringfügigem Überschreiten des ersten beziehungsweise zweiten Schwellenwertsdurch die vorzunehmende Ansteuerung der Leistungsstellanordnung keine das Fahrverhalten beeinträchtigendenRegelschwankungen zu erzeugen.
[0013] Ferner kann vorgesehen sein, daß die Ansteueranordnung die Leistungsstellanordnung erstnach Ablauf einer ersten vorbestimmten Zeitdauer nach Ansteuerung zum Verringern der Leistungsabgabedes Antriebsaggregats zum Erhöhen der Leistungsabgabe ansteuert. Eine derartige Ausgestaltungist aus folgendem Grund vorteilhaft. Bei einem Ausweichmanöver ist anzunehmen, daß zunächsteine Ausweichbewegung durchgeführt wird und dann eine entgegengesetzte Korrekturbewegung vorgenommen wird,um wieder in die ursprüngliche Fahrtrichtung zurückzukehren. Im Übergang zwischen den beidenKorrekturbewegungen kann beim Umfahren des Hindernisses ein kurzer Zeitraum auftreten, in demdas Fahrzeug sich geradlinig bewegt, d. h. die Querbeschleunigung und deren zeitliche Änderungauf einen Wert im Bereich von Null zurückkehren. Würde in diesem Zustand der Motor wieder aufseine ursprüngliche Leistungsabgabe zurückgebracht werden, so würde bei dem Eintritt in diezweite Korrekturbewegung die Leistungsabgabe erneut gesenkt werden müssen, was eine dementsprechendezeitliche Verzögerung des Ausnutzens der Motorbremse zur Folge hat. Da sich herausgestellt hat,daß durchzuführende Ausweichbewegungen im Bereich von einigen Sekunden liegen, ist es vorteilhaft,wenn zum Verhindern des zwischenzeitlichen Anstiegs der Leistungsabgabe des Motors die erstevorbestimmte Zeitdauer im Bereich von 3 bis 6 Sekunden, vorzugsweise 4 bis 5 Sekunden, liegt.
[0014] Beispielsweise kann die Betriebsparameter-Bestimmungsanordnung einen Drehzahlsensor fürwenigstens ein angetriebenes Rad und einen Drehzahlsensor für wenigstens ein nicht angetriebenes Radumfassen. Dabei wird dann der wenigstens eine Betriebsparameter durch Bestimmen einer Drehzahldifferenzzwischen den erfaßten Drehzahlen des wenigstens einen angetriebenen Rads und des wenigstenseinen nicht angetriebenen Rads bestimmt.
[0015] Es wird darauf hingewiesen, daß sofern in dem vorliegenden Text von "Bestimmen" die Redeist, dies sowohl die Erfassung bestimmter Größen durch entsprechende Detektoren oder Sensorenals auch die Ermittlung der gesuchten Größen aus bereits erfaßten oder in anderer Weise bestimmtenGrößen beinhaltet.
[0016] Vorzugsweise steuert die Ansteueranordnung die Reibungskupplung zum wenigstens teilweisenAusrücken derselben dann an, wenn der wenigstens eine Betriebsparameter beziehungsweise einAbsolutbetrag desselben einen dritten vorbestimmten Schwellenwert überschreitet.
[0017] Ferner kann vorgesehen sein, daß die Ansteueranordnung nach erfolgtem wenigstens teilweisenAusrücken der Reibungskupplung die Reibungskupplung zum im wesentlichen vollständigen Einrückenansteuert, wenn seit dem wenigstens teilweisen Ausrücken eine zweite vorbestimmte Zeitdauer,vorzugsweise im Bereich von 1 bis 2 Sekunden, vergangen ist. Da im allgemeinen davon ausgegangenwerden kann, daß durch das Ausrücken der Kupplung der Fahrzustand sich relativ schnell stabilisiert, kannauf diese Art und Weise sehr schnell wieder in den Zustand zurückgekehrt werden, in dem dasMotorbremsmoment zur Stabilisierung genutzt werden kann.
[0018] Weiterhin ist es möglich, daß die Ansteueranordnung nach erfolgtem wenigstens teilweisenAusrücken die Reibungskupplung zum im wesentlichen vollständigen Einrücken ansteuert, wenn derwenigs-tens eine Betriebsparameter beziehungsweise der Absolutbetrag desselben in den Bereich des drittenSchwellenwerts zurückkehrt. Auch hier ist es zum Vermeiden von Regelschwingungen vorteilhaft,eine Hysteresefunktion zu integrieren.
[0019] Um möglichst schnell wieder in den Zustand zurückzukehren, in dem das Motorbremsmoment zurStabilisierung des Fahrzeugs genutzt werden kann, wird vorgeschlagen, daß unmittelbar nach erfolgtemwenigstens teilweisen Ausrücken die Ansteuervorrichtung die Reibungskupplung zum Einrücken derselbenmit einer Einrückgeschwindigkeit ansteuert, welche kleiner ist als eine bei Durchführung des wenigstensteilweisen Ausrückens vorliegende Ausrückgeschwindigkeit. Es kann hier also nach Art eines Sägezahnmustersdie Kupplung zunächst sehr schnell ausgerückt werden und dann entlang einer flacheren Flankewieder eingerückt werden. Tritt beim Einrücken der Kupplung beispielsweise wieder der instabileFahrzustand auf, so wird die Kupplung spontan mit der hohen Ausrückgeschwindigkeit ausgerücktund erneut entlang der flacheren Flanke eingerückt. Es ergibt sich somit ein sägezahnartigeszeitliches Profil der Ein- beziehungsweise Ausrückbewegungen.
[0020] Beispielsweise kann der dritte vorbestimmte Schwellenwert eine Drehzahldifferenz im Bereichvon 0,15 bis 0,4 Umdrehungen pro Sekunde sein. Dies ist ein Wertebereich, der einem Fahrgeschwindigkeitsdifferenzbereichvon etwa 1 bis 2 km/h entspricht.
[0021] Der Betriebszustand, welcher zum Auslösen der Ansteuerung der Leistungsstellanordnung herangezogenwird, kann auch der Lenkwinkel eines Lenkrads des Fahrzeugs sowie eine zeitliche Änderung desselben seinoder durch diesen wiedergegeben sein. Auch der Lenkwinkel beziehungsweise die zeitliche Änderung desselbenhängt unmittelbar mit der Querbeschleunigung zusammen und kann somit in entsprechender Art undWeise, wie vorangehend mit Bezug auf die Querbeschleunigung selbst angegeben, als Auswahlkriteriumherangezogen werden. Auch in diesem Falle können selbstverständlich entsprechende Schwellenwertedefiniert werden, deren Über- beziehungsweise Unterschreiten das Auslösen beziehungsweise Beendendes Ansteuerns der Leistungsstellanordnung bestimmen.
[0022] Weiterhin ist es möglich, daß der Betriebszustand durch die Giergeschwindigkeit beziehungsweiseeine zeitliche Änderung derselben wiedergegeben ist. Auch diese Größen hängen unmittelbar mitder Querbeschleunigung zusammen.
[0023] Auch ist es möglich, daß der wenigstens eine Betriebsparameter, welcher zum Auslösender Ausrückbewegung der Reibungskupplung herangezogen wird, durch die Querbeschleunigung oder/undeine Längsbeschleunigung oder/und eine zeitliche Änderung dieser Größen wiedergegeben ist. Auchdiese Größen lassen unmittelbar erkennen, ob das Fahrzeug in einem stabilen oder einem instabilenbeziehungsweise sehr kritischen Fahrzustand ist.
[0024] In gleicher Weise ist es möglich, daß der wenigstens eine Betriebsparameter durch eineGiergeschwindigkeit oder/und eine zeitliche Änderung derselben wiedergegeben ist.
[0025] In dem Falle, daß das Antriebsaggregat eine Brennkraftmaschine ist, kann die Leistungsstellanordnung eineDrosselvorrichtung oder/und eine Kraftstoffeinspritzanordnung oder/und eine Zündzeitpunktbestimmungsanordnung umfassen.
Ausführungsbeispiel
[0026] Die vorliegende Erfindung wird nachfolgend mit Bezug auf die beiliegenden Zeichnungenanhand bevorzugter Ausgestaltungsformen detailliert beschrieben. Es zeigt:
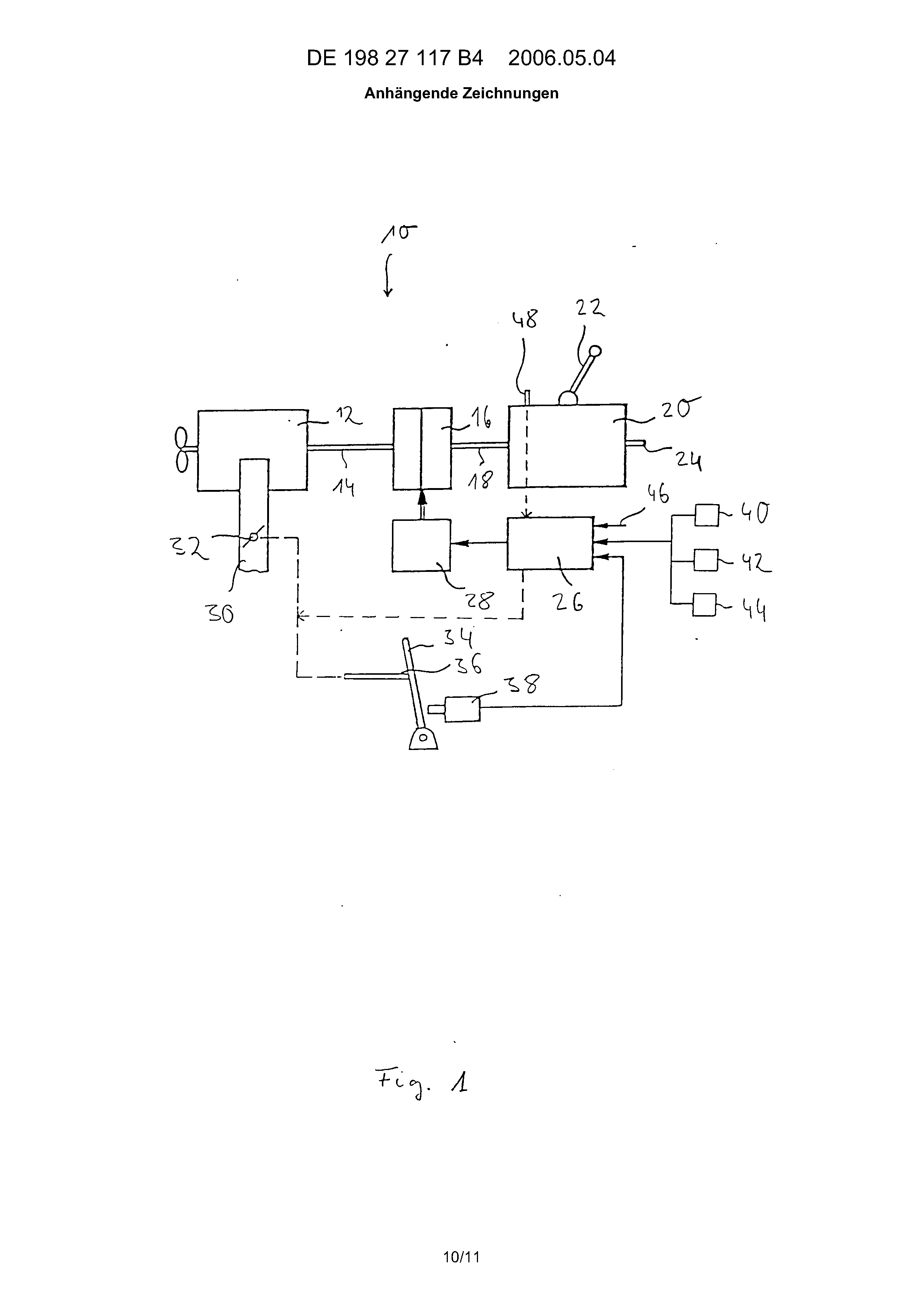
[0027] Fig. 1 ein schematisches Diagramm eines erfindungsgemäßen Antriebssystems;
[0028] Fig. 2 den Fahrweg eines Fahrzeugs bei Durchführung einer Ausweichbewegung; und
[0029] Fig. 3 schematisch die bei Durchführung der in Fig. 2 gezeigten Ausweichbewegungen auftretendeQuerbeschleunigung und deren zeitliche Änderung.
[0030] In Fig. 1 ist schematisch ein erfinungsgemäßes Antriebssystem 10 dargestellt. Das Antriebssystem10 umfaßt ein Antriebsaggregat 12, beispielsweise eine Brennkraftmaschine 12, welche durch eineAntriebswelle 14 mit einer automatisch betätigbaren Reibungskupplung 16 verbunden ist. Die Reibungskupplung16 steht ausgangsseitig über eine Getriebeeingangswelle 18 in Verbindung mit einem Schaltgetriebe20. Das Schaltgetriebe 20 wiederum steht über eine Getriebeausgangswelle 24 mit nicht dargestelltenAntriebsrädern in Verbindung.
[0031] Das Schaltgetriebe 20 kann ein automatisiertes Schaltgetriebe sein, welches einen zumDurchführen von manuellen Schaltvorgängen antippbaren Schalthebel 22 sowie einen Automatik-Wahlschalter48 umfaßt, durch welchen zwischen dem manuellen Schaltbetrieb und zumindest einem Automatikschaltbetriebumgeschaltet werden kann. Es sei darauf verwiesen, daß in gleicher Weise das Schaltgetriebe20 ein herkömmliches nicht automatisiertes Schaltgetriebe sein kann, bei welchem die Schaltvorgänge aktivdurch Bewegung des Schalthebels ohne Zwischenschaltung irgendwelcher Stellglieder vorgenommenwerden.[0032] Es ist ferner eine Ansteuervorrichtung 26 vorgesehen, welche über eine Stellvorrichtung28 auf die Kupplung 16 einwirkt. Das heißt, die Steuervorrichtung 26 steuert die Kupplung 16durch Abgabe entsprechender Stellsignale an die Stellvorrichtung 28 an.
[0033] Ferner ist eine Leistungsstellvorrichtung in Form einer Drossel 32 vorgesehen, welchein einem Einlaßluftkanal 30 für die Brennkraftmaschine 12 angeordnet ist. Die Drosselvorrichtung32 steht einerseits unter Ansteuerung eines einem Gaspedal 34 zugeordneten Stellglieds 36 und stehtandererseits unter Ansteuerung der Ansteuervorrichtung 26, wie nachfolgend beschrieben. Dasheißt, in einem normalen Fahrbetrieb wird durch das Stellglied 36 die Drosselvorrichtung 32auf eine dem Gaspedal 34 zugeordnete Stellung eingestellt, was eine dementsprechende Leistungsabgabeder Brennkraftmaschine zur Folge hat. Bei Auftreten bestimmter Betriebszustände kann jedochein Eingriff durch die Ansteuervorrichtung 26 vorgenommen werden.
[0034] Die Ansteuervorrichtung 26 empfängt verschiedene Signale, beispielsweise von einem Gaspedalsensor38, einem Querbeschleunigungssensor 40, einem Drehzahlsensor 42, welcher die Drehzahl einesangetriebenen Rads erfaßt, und einem Drehzahlsensor 44, welcher die Drehzahl eines nicht angetriebenenRads erfaßt. Selbstverständlich ist es möglich, hier jeweils bei mehreren angetriebenen beziehungsweisenicht angetriebenen Rädern die entsprechenden Drehzahlen zu erfassen und zur nachfolgenden Auswertungin die Ansteuervorrichtung 26 einzugeben. Ferner können weitere Sensoren Signale in die Ansteuervorrichtung26 eingeben, wie durch einen Pfeil 46 angezeigt.
[0035] In das in Fig. 1 dargestellte Antriebssystem sind verschiedene Sicherheitsfunktionenintegriert, welche nachfolgend beschrieben werden.
[0036] Es sei beispielsweise angenommen, daß das Fahrzeug V, welches das Antriebssystem 10 enthält, einerin Fig. 2 dargestellten Trajektorie T folgt. Diese Trajektorie T ergibt sich dadurch, daß beispielsweise vordem Fahrzeug V plötzlich ein Hindernis H auftaucht. Der Fahrer des Fahrzeugs V versucht daher zumZeitpunkt t1 durch Drehen des Lenkrads dem Hindernis Hauszuweichen. Zum Zeitpunktt2 führt er eine entgegengesetzte Lenkbewegung durch, um annähernd wieder in dieursprüngliche Fahrtrichtung zurückzukehren, und zum Zeitpunkt t3 ist auch diese zweite Lenkbewegungbeendet. Zum Zeitpunkt t4, zu dem das Fahrzeug V sich nahezu vollständig am HindernisH vorbeibewegt hat, führt der Fahrer wieder eine Lenkbewegung durch, mit welcher eine weitere Annäherung andie ursprüngliche Fahrtrichtung erreicht wird und zum Zeitpunkt t5 führt er eine entgegengesetzteLenkbewegung durch, welche zum Zeitpunkt t6 beendet ist und an deren Ende das Fahrzeug Vnäherungsweise wieder vollständig in der ursprünglichen Richtung fährt. Man erkennt; daß im wesentlichenvier einzelne Lenkbewegungen auftreten, nämlich zwischen den Zeiten t1 und t2, denZeiten t2 und t3, den Zeiten t4 und t5 und den Zeitent5 und t6. Die in diesen jeweiligen Zeitintervallen auftretenden Querbeschleunigungen sindschematisch im unteren Diagramm der Fig. 3 gezeigt, in welchem auf der horizontalen Achse dieZeit t und auf der vertikalen Achse die Querbeschleunigung a aufgezeichnet ist. Zunächst steigt ausgehendvom Wert Null die Querbeschleunigung a zum Zeitpunkt t1 an und ist zwischen den Zeitpunktent1 und t2 maximal. Zum Zeitpunkt t2, in welchem das Lenkradwieder nahezu gerade gestellt ist, ist die Querbeschleunigung auf den Wert Null zurückgekehrt undnimmt dann durch die Gegenlenkbewegung zwischen den Zeiten t2 und t3 einenerneuten Extremwert, jedoch mit entgegengesetztem Vorzeichen an. Zum Zeitpunkt t3ist auch diese Lenkbewegung beendet, so daß die Querbeschleunigung a auf den Wert Null zurückkehrt.Zwischen den Zeiten t4 und t6 findet der gleiche Vorgang, jedoch mit entgegengesetztemVorzeichen statt.
[0037] Aus dem oberen Diagramm der Fig. 3, welches die zeitliche Änderung, d. h. die erste Ableitungder Querbeschleunigung nach der Zeit, darstellt, erkennt man, daß zwischen den Zeiten t1und t3 beziehungsweise den Zeiten t4 und t6 drei Extremwerteder Änderung der Beschleunigung vorliegen.
[0038] Die durch den Querbeschleunigungssensor 40 erfaßte Querbeschleunigung wird also in dieAnsteuervorrichtung 26 eingegeben und in dieser einmal differenziert. Es liegen dann zu jedemZeitpunkt zwei Größen vor, nämlich die Querbeschleunigung und deren zeitliche Änderung, welcheden Betriebszustand des Fahrzeugs wiedergeben. In der Ansteuervorrichtung 26 wird jeder dieserbeiden Werte mit einem zugehörigen Schwellenwert S1 beziehungsweise S2verglichen, wobei hier der Absolutbetrag der Querbeschleunigung beziehungsweise der zeitlichenÄnderung derselben mit einem zugeordneten Schwellenwert verglichen wird. Wird erfaßt, daß sowohl dieQuerbeschleunigung als auch die zeitliche Ableitung den zugeordneten Schwellenwert S1beziehungsweise S2 überschritten haben, so wird durch die Ansteuervorrichtung 26ein Befehl zur Drosselvorrichtung 32 geleitet, um diese in einer Richtung zum Verringern derLeistungsabgabe der Brennkraftmaschine 12 zu verstellen. Das heißt, tritt das Fahrzeug in einenderartigen kritischen Fahrzustand ein, wird durch die Ansteuervorrichtung 26 auf die Brennkraftmaschine12 eingewirkt, um sofort deren Bremsmoment nutzen zu können. Es hat sich gezeigt, daß eine derartigeLeistungssenkung der Brennkraftmaschine 12, d. h. entweder eine maximale oder eine zumindestteilweise Leistungssenkung, zur Stabili-sierung des Fahrzeugs in derart kritischen Fahrzuständen beitragen kann.
[0039] Ferner werden durch die Drehzahlsensoren 42 und 44 die Drehzahlen der angetriebenen undder nicht angetriebenen Räder überwacht. Es sei beispielsweise angenommen, daß das FahrzeugV ein Vorderradantriebsfahrzeug ist, bei welchem die Vorderräder VR angetrieben werden, undsomit deren Drehzahl durch den Sensor 42 erfaßt wird, und die Hinterräder HR nicht angetriebensind, und daher deren Drehzahl durch den Sensor 44 erfaßt wird. Die Drehzahlen der Räder VRund HR, d. h. die diese Drehzahlen wiedergebenden Signale der Sensoren 42, 44, werden in derAnsteuervorrichtung 26 verglichen und ein Differenzwert zwischen diesen ermittelt, welcher einenbestimmten Betriebsparameter wiedergibt. Wird festgestellt, daß dieser Differenzwert beziehungsweiseein Absolutbetrag desselben über einem vorbestimmten Schwellenwert liegt, so kann darauf geschlossenwerden, daß das Fahrzeug in einen instabilen oder noch kritischeren Fahrzustand eintritt, inwelchem die Gefahr besteht, daß der Fahrer die Kontrolle über das Fahrzeug verliert. Dieserbestimmte durch die Drehzahldifferenz wiedergegebene Betriebsparameter kann beispielsweise eineGröße im Bereich von 0,15 bis 0,4 Umdrehungen pro Sekunde sein, was im Bereich einer Fahrgeschwindigkeitsdifferenzvon 1 bis 2 km/h liegt.
[0040] Wird in der Ansteuervorrichtung 26 erfaßt, daß trotz der bereits durchgeführten Leistungsabsenkung derBrennkraftmaschine 12 der Betriebsparameter, d. h. die Drehzahldifferenz, diese vorbestimmteSchwelle überschritten hat, gibt die Ansteuervorrichtung 26 einen Ansteuerbefehl zur Steuervorrichtung28 aus, so daß die Kupplung 16 zumindest teilweise ausgerückt wird. Es wird dann die Drehmomentübertragungsverbindungzwischen dem Antriebsaggregat 12 und den angetriebenen Rädern, in diesem Falle den Rädern VR,unterbrochen, und das Fahrzeug wird nach Art einer Antischlupfregelung unmittelbar wieder ineinen stabilen oder weniger kritischen Fahrzustand gebracht.
[0041] Für das erneute Einrücken der Kupplung 16 beziehungsweise das erneute Anheben der Leistungsabgabeder Brennkraftmaschine 12 nach einmal erfolgter Ansteuerung im Sinne eines Ausrückens beziehungsweiseim Sinne einer Leistungsabgabe können verschiedene Kriterien gesetzt werden. So kann hinsichtlichder Kupplung 16 angenommen werden; daß nach einer vorbestimmten Zeitdauer seit Ausrücken derselbenoder Erfassen, daß der Betriebsparameter die zugeordnete Schwelle überschritten hat, beispielsweise 1bis 2 Sekunden, der Fahrzustand sich wieder stabilisiert haben wird, so daß dann, wenn in derAnsteuervorrichtung 16 der Ablauf einer derartigen Zeitperiode erfaßt wird, wieder eine Ansteuerungim Sinne des Einrückens durchgeführt wird. Alternativ ist es auch möglich, daß der vorbestimmteBetriebsparameter, d. h. die Drehzahldifferenz, weiterhin überwacht wird, und dann, wenn erwieder in den Bereich des angegebenen Schwellenwerts zurückkehrt, kann die Kupplung wieder imSinne eines Einrückens geschlossen werden. Hier ist es vorteilhaft, eine Regelhysterese vorzusehen,so daß Regelschwankungen um einen festgelegten Schwellenwert vermieden werden können.
[0042] Auch ist es möglich, die Kupplung unmittelbar nach einmal erfolgtem Ausrücken wieder einzurücken undzwar mit einer Einrückgeschwindigkeit, welche deutlich geringer ist als die Ausrückgeschwindigkeit.Zeigt sich, daß bei diesem Einrückvorgang das Fahrzeug sofort wieder in einen instabilen Zustandkommt, so kann wieder mit erhöhter Geschwindigkeit ausgerückt werden und der Vorgang wiederholtwerden, so daß sich ein sägezahnartiges zeitliches Ein- beziehungsweise Ausrückprofil der Kupplung16 ergibt.
[0043] Hinsichtlich der Leistungsabgabe ist es vorteilhaft, ein Zeitintervall tszu definieren, welches bei Beginn des Anstiegs der Querbeschleunigung und somit unmittelbarbei Beginn der Leistungsabsenkung beginnt und welches so lange ist, daß davon ausgegangen werden kann,daß nahezu der gesamte Ausweichvorgang innerhalb dieses Intervalls ts liegt. Würdenämlich allein der Vergleich des Querbeschleunigungswertes beziehungsweise der zeitlichen Änderung desselbenmit den zugehörigen Schwellenwerten S1 beziehungsweise S2 dazu herangezogenwerden, die Leistungsabgabe dann wieder anzuheben, wenn beide Schwellenwerte unterschrittensind, so würde in dem in Fig. 3 eingezeichneten Zeitintervall Δt die Leistungsabgabe derBrennkraftmaschine 12 wieder angehoben werden mit der Folge, daß bei erneutem Überschreiten derSchwellenwerte S1 und S2 nach dem Zeitpunkt t4 die Leistungsabgabeerneut gesenkt werden müßte, um das Motorbremsmoment zur Stabilisierung des Fahrzeugs ausnutzenzu können. Die dabei auftretende zeitliche Verzögerung kann vermieden werden, wenn das Zeitintervallts so lange gesetzt wird, daß auch die Rückkehrbewegung, welche zwischen den Zeitent4 und t4 durchgeführt wird, zumindest noch teilweise darin liegt. Istdas Zeitintervall ts dann abgelaufen und wird auch erfaßt, daß die Querbeschleunigunga und deren zeitliche Ableitung jeweils in den Bereich der zugeordneten Schwellenwerte S1beziehungsweise S2 zurückgekehrt sind, so kann auch die Leistungsabgabe der Brennkraftmaschine12 durch entsprechende Ansteuerung der Ansteuervorrichtung 26 wieder auf diejenige Leistungsabgabeangehoben werden, welche der Stellung des Gaspedals 34 entspricht. Entsprechendes trifft fürden Fall zu, daß das gesetzte Sicherheitszeitintervall ts länger ist als die für dieDurchführung des gesamten Ausweichvorgangs erforderliche Zeit, wie bei dem Zeitintervall ts'in Fig. 3 gezeigt. Da in diesem Falle die Beschleunigung und deren Ableitung bereits vor Ablauf des Intervallsts' unter die zugehörigen Schwellenwerte zurückgekehrt sind, wird unmittelbar beiAblauf des Zeitintervalls ts' die Leistungsabgabe der Brennkraftmaschine 12 wiederangehoben.
[0044] Von Bedeutung bei dem erfindungsgemäßen Antriebssystem 10 ist, daß ein zweistufiger Sicherheitsbetriebvorgenommen wird. Es wird zunächst die Leistungsabgabe gesenkt und es wird erst dann, wenn erfaßtwird, daß auch die Senkung der Leistungsabgabe nicht zum Halten des Fahrzeugs in einem stabilenoder nur wenig kritischen Fahrzustand genügt, eine weitere Maßnahme, nämlich das Ausrücken derKupplung, ergriffen. Da die Kupplung erst ausgerückt wird, nachdem die Leistungsabgabe der Brennkraftmaschine12 und somit deren Drehzahl gesenkt worden ist, besteht beim Ausrücken der Kupplung grundsätzlich nichtdie Gefahr, daß die Brennkraftmaschine 12 aufgrund des dann fehlenden Widerstands in unerwünschterWeise hochdreht und dabei möglicherweise beschädigt wird.
[0045] Es sei darauf hingewiesen, daß anstelle der vorangehend angesprochenen Größen Querbeschleunigungbeziehungsweise zeitliche Ableitung derselben und/oder Drehzahldifferenz andere den Fahrzustanddes Fahrzeugs charakterisierende Größen zur Bestimmung des Betriebszustands beziehungsweisedes Betriebsparameters herangezogen werden können. Beispielsweise kann die Erfassung des Lenkwinkelsebenso einen Schluß auf die Querbeschleunigung liefern und somit in entsprechender Weise wie dieQuerbeschleunigung selbst beziehungsweise deren Ableitung zum Auslösen der Leistungsabsenkungherangezogen werden. Entsprechendes trifft auch für die Giergeschwindigkeit beziehungsweiseGierbeschleunigung des Fahrzeugs zu. Es ist selbstverständlich, daß diese Größen Lenkwinkel undGiergeschwindigkeit durch entsprechende Sensoren erfaßt werden können beziehungsweise durchBerechnung aus Ausgangssignalen anderer Sensoren, wie z. B. den Raddrehzahlsensoren und dergleichen,berechnet werden können. Anstelle der Drehzahldifferenz zur Bestimmung des Betriebsparameters kannin gleicher Weise die Querbeschleunigung oder eine Längsbeschleunigung des Fahrzeugs oder auchdie Gierbewegung desselben Aufschluß über den Betriebszustand des Fahrzeugs geben, da auch beruhendauf diesen Größen darauf geschlossen werden kann, ob das Fahrzeug beispielsweise in einem übersteuernden odereinem untersteuernden Zustand ist, welche eine entsprechende Korrektur erfordert.
[0046] Es wird ferner darauf hingewiesen, daß sowohl die Änderung der Leistungsabgabe als auchdie Änderung des Einkuppelzustands der Kupplung 16 jeweils mit Änderungsgeschwindigkeiten vorgenommen werdenkönnen, welche entweder an die erfaßten Größen, d. h. beispielsweise die Querbeschleunigungbeziehungsweise die Drehzahldifferenz, angepaßt sind, oder jeweils mit maximal möglicher Geschwindigkeitvorgenommen werden können. Um den Effekt des Motorbremsens noch verstärkt ausnutzen zu können, istes im Falle eines automatisierten Schaltgetriebes möglich, daß dieses dann bei Senkung der Leistungsabgabedurch Ansteuerung von der Ansteuervorrichtung 26 zusätzlich heruntergeschaltet wird.
[0047] Ferner wird darauf hingewiesen, daß die Leistungsabgabe der Brennkraftmaschine 12 nichtnur durch die vorangehend beispielhaft angeführte Drosselvorrichtung 32 vollzogen werden kann,sondern daß ebenso der Zündwinkel beeinflußt werden kann, verschiedene Zylinder ausgeblendetwerden können oder Einspritzventile derart angesteuert werden können, daß die Einspritzmengedes Kraftstoffs vermindert wird oder die Einspritzung hinsichtlich der Kolbenstellung zu einem anderenZeitpunkt vorgenommen wird. Von Bedeutung ist jedoch, daß durch die vorzunehmenden Maßnahmen dieLeistungsabgabe der Brennkraftmaschine gesenkt werden kann.
[0048] Das erfindungsgemäße Antriebssystem 10 kann ferner zur Durchführung herkömmlicher Antischlupfregelvorgänge genutztwerden. Wird beispielsweise durch die Raddrehzahlsensoren 42, 44 erfaßt, daß die AntriebsräderVR durchdrehen, d. h. eine deutlich größere Drehzahl aufweisen als die nicht angetriebenen RäderHR, so kann die Ansteuervorrichtung 26 zum einen Ansteuerbefehle zum Senken der Leistungsabgabeder Brennkraftmaschine 12 und zum anderen Ansteuerbefehle zum zumindest teilweisen Ausrückender Kupplung 16 erzeugen. Dabei wird derart vorgegangen, daß unmittelbar bei Eintreten in einenSchlupfzustand, welcher einen ungewollt großen Schlupf wiedergibt und bei welchem somit diemaximale Traktion nicht mehr vorliegt, die Leistungsabgabe der Brennkraftmaschine 12 gesenkt wird,beispielsweise in Proportion zum Schlupfzustand oder in maximalem Ausmaß, und die Kupplung 16so weit ausgerückt wird, daß sie das am Beginn des Ansteuervorgangs vorliegende Motordrehmomentim wesentlichen vollständig, d. h. im wesentlichen ohne Schlupf zum Schaltgetriebe 20 übertragen kann.Erst dann, wenn das Drehmoment beziehungsweise die Drehzahl der Brennkraftmaschine 12 durchSenkung der Leistungsabgabe soweit abgefallen ist, daß eine Unterbrechung der Antriebsverbindungzum Schaltgetriebe 20 nicht zu einem ungewünschten Hochdrehen der Brennkraftmaschine 12 führenkann, wird die Kupplung 16 weiter ausgerückt, um die Antriebsräder wieder in einen normalen,im wesentlichen nicht schlupfenden Zustand zurückzubringen. Diese zweite Stufe der Antiblockierregelung,bei welcher dann die Kupplung 16 ausgerückt wird, führt zu einer im Vergleich zum Abfall derMaschinen-leistung spontanen Unterbrechung der Antriebsverbindung, so daß trotz des Vermeidens eines ungewünschten Hochdrehensder Brennkraftmaschine eine sehr schnelle Rückführung der Antriebsräder in den normalen Betriebszustanddurchgeführt werden kann. Wird ein Schlupfschwellenwert oder ein diesem zugeordneter Hysteresewertwieder unterschritten, so wird die Kupplung 16 wieder eingerückt und die Leistungsabgabe derBrennkraftmaschine 12 wird wieder auf den ursprünglichen Wert, beispielsweise den durch dasGaspedal 34 vorgegebenen Wert, angehoben.
[0049] Es sei auch in diesem Zusammenhang darauf verwiesen, daß die Leistungsabgabe durch verschiedensteMaßnahmen, beispielsweise wiederum Verstellung des Zündzeitpunkts, Veränderung der Kraftstoffeinspritzmengeund des Kraftstoffeinspritzzeitpunkts und dergleichen, vorgenommen werden kann.
[0050] Der Betriebszustand der Maschine 12, bei welchem durch Ansteuerung der Kupplung 16 dieDrehmomentübertragungsverbindung unterbrochen werden kann, hängt stark vom Typ der Maschineab.
- ein Antriebsaggregat (12),
- eine dem Antriebsaggregat zugeordnete Leistungsstellanordnung (32) zum Einstellen der Leistungsabgabe des Antriebsaggregats (12),
- ein Schaltgetriebe (20),
- eine im Drehmomentübertragungsweg zwischen dem Antriebsaggregat (12) und dem Schaltgetriebe (20) angeordnete, automatisch betätigbare Reibungskupplung (16),
- eine Betriebszustands-Bestimmungsanordnung (40, 26) zum Bestimmen wenigstens einer Größe, die einen mit der Querbeschleunigung (a) des Fahrzeugs (V) in Zusammenhang stehenden Betriebszustand charakterisiert,
- eine Ansteueranordnung (26), welche die wenigstens eine Größe mit einer Referenzgröße (S1, S2) vergleicht und dann, wenn der Vergleich auf das Vorliegen eines kritischen Fahrzustands hinweist, auf die Leistungsstellanordnung (32) einwirkt, um die Leistungsabgabe des Antriebsaggregats (12) zu beeinflussen,
- eine Betriebsparameter-Bestimmungsanordnung (42, 44, 26) zum Bestimmen wenigstens eines Betriebsparameters, welcher darauf hinweist, ob das Fahrzeug in einem stabilen Fahrzustand ist oder nicht, wobei die Ansteueranordnung dann, wenn der wenigstens eine Betriebsparameter in einem...
1. Antriebssystem für ein Fahrzeug, umfassend: - ein Antriebsaggregat (12), - eine dem Antriebsaggregat zugeordnete Leistungsstellanordnung (32) zum Einstellen der Leistungsabgabedes Antriebsaggregats (12), - ein Schaltgetriebe (20), - eine im Drehmomentübertragungsweg zwischen dem Antriebsaggregat (12) und dem Schaltgetriebe(20) angeordnete, automatisch betätigbare Reibungskupplung (16), - eine Betriebszustands-Bestimmungsanordnung (40, 26) zum Bestimmen wenigstens einer Größe,die einen mit der Querbeschleunigung (a) des Fahrzeugs (V) in Zusammenhang stehenden Betriebszustand charakterisiert,
- eine Ansteueranordnung (26), welche die wenigstens eine Größe mit einer Referenzgröße (S1, S2)vergleicht und dann, wenn der Vergleich auf das Vorliegen eines kritischen Fahrzustands hinweist,auf die Leistungsstellanordnung (32) einwirkt, um die Leistungsabgabe des Antriebsaggregats (12)zu beeinflussen, - eine Betriebsparameter-Bestimmungsanordnung (42, 44, 26) zum Bestimmen wenigstens eines Betriebsparameters,welcher darauf hinweist, ob das Fahrzeug in einem stabilen Fahrzustand ist oder nicht, wobeidie Ansteueranordnung dann, wenn der wenigstens eine Betriebsparameter in einem vorbestimmtenBereich ist und wenn die Leistungsabgabe des Antriebsaggregats (12) wenigstens teilweise gesenktworden ist, die Reibungskupplung (16) zum wenigstens teilweisen Ausrücken derselben ansteuert.
2. Antriebssystem nach Anspruch 1, dadurch gekennzeichnet, daß die Betriebszustands-Bestimmungsanordnung(40, 26) dazu ausgebildet, ist, die Querbeschleunigung (a) und die zeitliche Änderung (da/dt) derQuerbeschleunigung (a) zu bestimmen und daß der bestimmte Betriebszustand durch die Querbeschleunigung(a) und deren zeitliche Änderung (da/dt) wiedergegeben ist.
3. Antriebssystem nach Anspruch 2, dadurch gekennzeichnet, daß die Ansteueranordnung (26)dann, wenn die Querbeschleunigung (a) oder ein Absolutbetrag derselben einen ersten vorbestimmtenSchwellenwert (S1) überschreitet und die zeitliche Änderung der Querbeschleunigung (da/dt) oderein Absolutbetrag derselben einen zweiten vorbestimmten Schwellenwert (S2) überschreitet, dieLeistungsstellanordnung (32) zum Verringern der Leistungsabgabe des Antriebsaggregats (12) ansteuert.
4. Antriebssystem nach Anspruch 3, dadurch gekennzeichnet, daß die Ansteueranordnung (26)die Leistungsstellanordnung (32) zum Verringern der Leistungsabgabe des Antriebsaggregats (12) aufeinen minimalen Wert oder auf einen von der erfaßten Querbeschleunigung (a) oder/und deren zeitlicherÄnderung (da/dt) abhängigen Wert ansteuert.
5. Antriebssystem nach Anspruch 3 oder 4, dadurch gekennzeichnet, daß die Ansteueranordnung(26) nach Rückkehr der Querbeschleunigung (a) und der zeitlichen Änderung (da/dt) derselbenin den Bereich des ersten vorbestimmten Schwellenwertes und des zweiten vorbestimmten Schwellenwertesdie Leistungsstellanordnung (32) zum Erhöhen der Leistungsabgabe ansteuert.
6. Antriebssystem nach Anspruch 5, dadurch gekennzeichnet, daß die Ansteueranordnung (26)die Leistungsstellanordnung (32) erst nach Ablauf einer ersten vorbestimmten Zeitdauer (ts)nach Ansteuerung zum Verringern der Leistungsabgabe des Antriebsaggregats (12) zum Erhöhen derLeistungsabgabe ansteuert.
7. Antriebssystem nach Anspruch 6, dadurch gekennzeichnet, daß die erste vorbestimmte Zeitdauer(ts) im Bereich von 3 bis 6 Sekunden liegt.
8. Antriebssystem nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, daß die Betriebsparameter-Bestimmungsanordnung(42, 44, 26) einen Drehzahlsensor (42) für wenigstens ein angetriebenes Rad (VR) und einen Drehzahlsensor(44) für wenigstens ein nicht angetriebenes Rad (HR) umfaßt und daß der wenigstens eine Betriebsparameterdurch Bestimmen einer Drehzahldifferenz zwischen den erfaßten Drehzahlen des wenigstens einenan-getriebenen Rads (VR) und des wenigstens einen nicht angetriebenen Rads (HR) bestimmt wird.
9. Antriebssystem nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, daß die Ansteueranordnung(26) die Reibungskupplung (16) zum wenigstens teilweisen Ausrücken desselben ansteuert, wennder wenigstens eine Betriebsparameter oder ein Absolutbetrag desselben einen dritten vorbestimmtenSchwellenwert überschreitet.
10. Antriebssystem nach Anspruch 8 und Anspruch 9, dadurch gekennzeichnet, daß der drittevorbestimmte Schwellenwert eine Drehzahldifferenz im Bereich von 0,15 bis 0,4 Umdrehungen proSekunde ist.
11. System nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß die Ansteueranordnung (26)nach erfolgtem wenigstens teilweisen Ausrücken der Reibungskupplung (16) diese Reibungskupplungzum im wesentlichen vollständigen Einrücken ansteuert, wenn seit dem wenigstens teilweisen Ausrückeneine zweite vorbestimmte Zeitdauer vergangen ist.
12. Antriebssystem nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, daß die Ansteueranordnungnach erfolgtem wenigstens teilweisen Ausrücken die Reibungskupplung (16) zum im wesentlichenvollständigen Einrücken ansteuert, wenn der wenigstens eine Betriebsparameter oder der Absolutbetrag desselbenin dem Bereich des dritten vorbestimmten Schwellenwertes zurückkehrt.
13. Antriebssystem nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß unmittelbarnach erfolgtem wenigstens teilweisen Ausrücken der Reibungskupplung (16) die Ansteueranordnung(26) die Reibungskupplung (16) zum Einrücken derselben mit einer Einrückgeschwindigkeit ansteuert,welche kleiner ist als eine bei Durchführung des wenigstens teilweisen Ausrückens vorliegendeAusrückgeschwindigkeit.
14. Antriebssystem nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, daß der Betriebszustanddurch einen Lenkwinkel und eine zeitliche Änderung desselben wiedergegeben ist.
15. Antriebssystem nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, daß der Betriebszustanddurch eine Giergeschwindigkeit und eine zeitliche Änderung derselben wiedergegeben ist.
16. Antriebssystem nach einem der Ansprüche 1 bis 15, dadurch gekennzeichnet, daß der wenigstenseine Betriebsparameter durch die Querbeschleunigung oder/und eine Längsbeschleunigung oder/undeine zeitliche Änderung derselben wiedergegeben ist.
17. Antriebssystem nach einem der Ansprüche 1 bis 15, dadurch gekennzeichnet, daß der wenigstenseine Betriebsparameter durch eine Giergeschwindigkeit oder/und eine zeitliche Änderung derselbenwiedergegeben ist.
18. Antriebssystem nach einem der Ansprüche 1 bis 17, dadurch gekennzeichnet, daß die Leistungsstellanordnungeine Drosselvorrichtung oder/und eine Kraftstoffeinspritzanordnung oder/und eine Zündzeitpunktbestimmungsanordnung umfaßt unddaß das Antriebsaggregat eine Brennkraftmaschine ist.
Es folgen 2 Blatt Zeichnungen