A digital hardware-based system and method for preventing the initial onset of trailer vibrations and the control thereof
Die Erfindung betrifft ein Verfahren, ein System und eine Vorrichtung zum Verhindern des anfänglichen Beginns und der weiteren Entwicklung der Schwingungen und Pendelbewegungen („Schlingerbewegungen“) des Anhängers, welche für gewöhnlich beim Ziehen eines Anhängers, eines Wohnwagens, eines Bootes oder eines ähnlichen Fahrzeuges ohne Eigenantrieb hinter einem Fahrzeug mit Eigenantrieb auftreten. Das Fahrzeug mit Eigenantrieb hat entweder einen Benzinmotor, einen Dieselmotor, einen Elektromotor oder einen Hybridmotor als Antrieb. Die Bezeichnung Anhänger, wie in dieser Beschreibung verwendet, bezieht sich auf jede bereifte Vorrichtung, die an einem entsprechend angetriebenen Zugfahrzeug angebracht ist und entfernt werden kann. Ein Anhänger kann zum Bewegen eines Bootes oder Autos von einem Ort zum anderen verwendet werden. Eine weitere Ausführungsform eines Anhängers, wie es in dieser Erfindung beschrieben wird, kann einen Pferdeanhänger aufweisen, der zum Bewegen eines lebenden Pferdes von einem Ort zum anderen verwendet wird. Andere Ausführungsformen können einen Wohnwagen aufweisen, welcher während einer Ferienreise oder eines Ausflugs von einem Ort zum anderen gezogen werden kann. Eine weitere Ausführungsform des Anhängers kann eine bereifte Vorrichtung zum Bewegen von großen Mengen von Waren von einem Ort zum anderen sein. Offensichtlich kann sich die Bezeichnung Anhänger auf jede beliebige andere Ausführungsform einer Vorrichtung mit einer Achse oder mehreren Achsen und Reifen oder mehreren Reifen, die für ein breites Spektrum an Anwendungen verwendet werden, beziehen; die konstante Gemeinsamkeit zwischen jedem dieser Anhänger ist, dass sie, wie oben definiert, an einem angetriebenen Zugfahrzeug angehängt und abgehängt werden können. Eine steigende Anzahl von schwerwiegenden anhängerbezogenen Unfällen ereignet sich jedes Jahr auf der ganzen Welt aufgrund des Beginns und der Entwicklung von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) des Anhängers, welche der Fahrer des Zugfahrzeuges nicht kontrollieren und stoppen kann. Die Ausbreitung dieser auf Schwingungen, auch „Schlingern“ genannt, basierenden Unfälle die jedes Jahr auftreten, ist aufgrund der wachsenden Popularität von Zugbasierten Sportaktivitäten und Urlaub grundsätzlich erhöht. Im Vereinigten Königreich können Personen mit einem vor dem 1. Januar 1997 ausgestellten Führerschein für gewöhnlich ein Fahrzeug und einen Anhänger mit einer kombinierten zulässigen Gesamtmasse von bis zu 8.250 kg fahren, was in etwa 8 (acht) Imperiale Tonnen entspricht. Personen mit einem nach dem 1. Januar 1997 ausgestellten Führerschein dürfen ein Fahrzeug und eine Anhänger-Kombination mit einer kombinierten zulässigen Gesamtmasse von bis zu 3.500 kg fahren, was in etwa 3,4 (drei Komma vier) Imperiale Tonnen entspricht. Diese substantiellen Grenzen erlauben es Personen mit begrenztem oder keinem vorherigen Training oder Erfahrungen Anhänger mit einer erheblichen Masse und daher Schwung zu ziehen. Ein beträchtlicher Schwung ist oft einer der Hauptfaktoren von auf Schwingungen („Schlinger“) basierenden Schleppunfällen. Gegenwärtig scheint die Mehrheit der auf Stabilisierung ausgerichteten Systeme auf Mikrocontroller-Software-basierten Erkennungssystemen zu basieren, welche versuchen, den Anhänger zu kontrollieren und zu stabilisieren, nachdem die Schwingungen („Schlingerbewegungen“) sich in dem Anhänger und dem Zugfahrzeug vollständig entwickelt haben. Das System scheint sich dann auf das gleichzeitige Verlangsamen des Anhängers und des Zugfahrzeuges zu verlassen. Diese Systeme verlangsamen das Zugfahrzeug sofort durch die gleichzeitige Anwendung von Bremsvorgängen auf das Fahrzeug, das verwendet wird, um den Anhänger zu ziehen und in manchen Fällen auch auf den Anhänger selbst (falls dieser vollständige steuerbare Bremsen aufweist). Oft wird in einigen grundlegenderen Einrichtungen die Anwendung von Auflaufbremsen, falls sie an dem Fahrzeug ohne Eigenantrieb (Anhänger) angebracht sind, durch die Schwingungskraft selbst aufgebracht. Dieses grundlegende System, obwohl man es gemeinhin im Handel findet, ermöglicht keine überwachte und gesteuerte Bremskraft des Anhängers. Die vorliegende Erfindung bezieht sich auf ein Verfahren, System und eine Vorrichtung zum Verhindern des anfänglichen Beginns und der weiteren Entwicklung von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) eines Anhängers am ersten anfänglichen Auftreten der digital ermittelten und überwachten Schwingungen. Das System verwendet ein auf einem FPGA (Field Programmable Gate Array) basierenden Erkennungs-, Überwachungs- und Steuersystem mit einem Bluetooth Low Energy Netzwerk (BLE Version 5.0 onwards), wobei sich IMU-Sensoren an beiden Seiten des Anhängers (Fahrzeug ohne Eigenantrieb) und an dem Zugfahrzeug (Fahrzeug mit Eigenantrieb) befinden. Die Verwendung von digitaler FPGA-hardwarebasierter Technologie ermöglicht eine Erhöhung der Geschwindigkeit innerhalb des Erkennungs-, Überwachungs- und Steuersystems von mindestens einer Größenordnung (10-x) gegenüber softwarebasierten Mikrosteuerungssystemen. Das System verwendet einen Kalman-Filter-Algorithmus innerhalb der Hardware des FPGA zum Verringern der Geräusche innerhalb der IMU-Sensordaten vor der Verarbeitung. Das System führt dann seinen eigenen spezifischen Algorithmus durch und verwendet die multiplen Daten der IMUs, um den anfänglichen Beginn von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) von Anhängern und Zugfahrzeugen festzustellen. Sobald der hardwarebasierte FPGA Algorithmus den anfänglichen Beginn der Schwingungen und Pendelbewegungen („Schlingerbewegungen“) festgestellt hat, stellt das System anschießend fest, ob es sicher ist das Verfahren zur Verringerung von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) einzuleiten. Ein kurzer Überblick des grundlegenden Verfahrens der Schwingungen- und Pendelbewegungen („Schlingerbewegungen“) wird nun vor der Beschreibung der Zeichnungen erläutert und eine ausführliche Beschreibung wird später vollständig gegeben. Sobald das System den anfänglichen Beginn von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) innerhalb der IMU-Daten von entweder und/oder sowohl dem Anhänger als auch dem Zugfahrzeug erkannt hat, werden die hardwarebasierten FPGA und Dual ARM Cortex A9®-Prozessoren des Systems die folgenden Verfahren durchführen. Das System wird, wenn möglich, durch Kommunikation mit dem CAN BUS des Fahrzeuges feststellen, ob es sicher ist, die Geschwindigkeit des Fahrzeuges zu beschleunigen. Das System wird dies durchführen, indem es Informationen von dem LIDAR-Tempomatsystem (Light Detection and Ranging) des Zugfahrzeuges (oder einem gleichwertiges System) anfordert, wenn diese über das CAN-BUS-Netzwerk verfügbar sind; falls diese Informationen nicht verfügbar sind, muss der Fahrer des Fahrzeuges eine Paddle-Steuerung oder einen Knopf an der Lenkradumrandung nach einem Piepton innerhalb des Kabinenbereichs des Zugfahrzeuges betätigen. Voraussetzend, dass das System entweder von LIDAR oder dem Fahrer die Information bekommen hat, dass es sicher ist das Verfahren einzuleiten, wird es sofort mit seinem Verfahren wie folgt beginnen. Das System wird anfänglich ein PWM-Antriebssignal (Pulsweitenmodulation) mit einem niedrigen Arbeitszyklus im Bereich von 35 % auf beide Anhängeraktuatoren (links und rechts) anwenden, um so eine geringe Bremskraft von ungefähr 35 % auf den Anhänger oder das gezogenen Fahrzeug ohne Eigenantrieb auszuüben. Gleichzeitig wird das System die Zuggeschwindigkeit des Zugfahrzeuges erhöhen, wobei bereits entweder durch LIDAR oder den Eingriff des Fahrers, wie oben erläutert, sichergestellt wurde, dass es sicher ist, dies zu tun. Die Erhöhung der Fahrgeschwindigkeit wird sich in dem Bereich von 10 % der vorherigen Fahrgeschwindigkeit befinden. Das System wird anschließend eine kurze Zeitspanne im Bereich von 250 ms bis 500 ms (zweihundertfünfzig Millisekunden bis fünfhundert Millisekunden) warten bevor die Signale der IMUs erneut analysiert werden. Die vier Signale der IMUs, oder mehr, wenn eine größere Anzahl der IMUs im Anhänger angebracht werden; werden, wie oben beschrieben erneut durch einen Kalman-Filter unter der Nutzung der Hardware-FPGA analysiert. Anhänger mit einem längeren Radstand, welcher eine zusätzliche Anzahl von Achsen aufweisen kann, können eine zusätzliche Anzahl von IMUs benötigen, die an dem Anhänger um eine Linie die die Reifen der zusätzlichen Achsen durchläuft, angebracht sind. Sobald die gefilterten Signale innerhalb der Originalsignale verglichen wurden, bevor die Bremssignale angewendet werden (Bremsbetätigung nur auf Anhänger) und die Fahrgeschwindigkeit des ziehenden Fahrzeuges mit Eigenantrieb erhöht wurde, wird eine Entscheidung getroffen, entweder die Brems-PWM-Signalimpulse und die Geschwindigkeit inkrementell zu erhöhen, gleich zu lassen oder zu verringern. Die Entscheidung wird aufgrund der entweder steigenden oder sinkenden Schwingungen und Pendelbewegungen („Schlingerbewegungen“) getroffen. Eine detaillierte Beschreibung dieses Verfahrens wird nach der detaillierten Beschreibung der Zeichnungen erläutert. Der größte Vorteil dieser Erfindung und dieses Verfahrens besteht darin, dass von den IMUs empfangene Signale der Schwingungen und Pendelbewegungen („Schlingerbewegungen“) in Echtzeit mit einem Kalman-Filter in Hardware (FPGA) verarbeitet werden. Die Verarbeitung von mindestens vier separaten Kanälen oder mehreren IMU-Daten wird parallel in der FPGA-Hardware ausgeführt und nicht sequentiell verarbeitet, was der Fall wäre, wenn es innerhalb einer Mikrosteuerungs-CPU innerhalb eines Software-Algorithmus verarbeitet werden würde. Der Verarbeitungsgeschwindigkeitsvorteil der FPGA-Hardware ist mindestens um eine Größenordnung (10x) schneller als bei Software innerhalb einer der derzeit schnellsten sich auf dem Markt befindlichen Mikrosteuerungen. Die Ausführungsform der vorliegenden Erfindung verwendet ein ZYNQ 7000® Serie SoC FPGA. Dieses bestimmte FPGA ermöglicht eine Kombination beider Field Programmable Gate Array (FPGA) Hardware mit einem Dual-Core ARM Cortex-A9 Prozessor, wobei jeder Kern mit einer Geschwindigkeit von bis zu 1 GHz arbeitet. Diese bestimmte FPGA wird von Xilinx ® hergestellt, jedoch könnte eine ähnliche Ausführungsform der Erfindung mit einer ähnlichen FPGA mit entweder einem Single-Core oder Dual-Core ARM Cortex Prozessor eines anderen Herstellers, wie zum Beispiel Altera ®, Actel ® oder Lattice Semiconductor ®, nur um ein paar zu nennen, produziert werden. Die vorliegende Ausführungsform, welche das ZYNQ 7000® Serie SoC FPGA mit seinem Dual ARM Cortex-A9 Prozessor verwendet, ermöglicht eine Erhöhung der Bearbeitungsgeschwindigkeit von mindestens einer Größenordnung (10x) schneller als jedes andere auf einer Mikrosteuerung basierendes Softwaresystem. Die ZYNQ 7000 ® Serie bietet auch den Vorteil der „AXI“-Verbindung (Advanced eXtensible Interface) zwischen der programmierbaren Logik des FPGA und des Verarbeitungssystems der Dual Arm Cortex-A9 Prozessoren. Diese Vorteile der Verbindung zwischen Hardware und Software ermöglichen es der vorliegenden Erfindung die Schwingungen und Pendelbewegungen („Schlingerbewegungen“) des Anhängers in fast Echtzeit zu verarbeiten und zu steuern, so dass die Schwingungen („Schlingern“) beim Beginn kontrolliert und gestoppt werden können, bevor sie sich zu vergrößerten Schwingungen entwickeln, welche sich sonst noch weiterentwickeln könnten, ohne die Möglichkeit sie einzudämmen. Die vorliegende Erfindung bietet eine Vielzahl von weiteren Sicherheitsvorteilen gegenüber anderen Anti-Schwingungs-Systemen („Anti-Schlinger-Systemen“) die gegenwärtig auf dem Mark erhältlich sind. Dies umfasst ein GPS-Kommunikationsmodul, das es ermöglicht, eine Datenbank mit Bereichen die anfällig für Schwingungen („Schlingern“) sind (die als „schwarze Flecken“ bekannt sind) für zukünftige Sicherheitshinweise zu protokollieren und zu katalogisieren. Ebenfalls beinhaltet das System ein Notfallbremssystem für den Anhänger, so dass falls der Anhänger vom Zugfahrzeug gelöst wird, die Bremsen automatisch und sofort auf den Anhänger angewendet werden und die Warn- und Bremslichter sofort angewendet werden. Die Warn- und Bremslichter des Anhängers werden von den wiederaufladbaren Batterien der drahtlosen elektrischen Bremsenaktoren angetrieben; dies wird später noch genauer in der Beschreibung erläutert. Diese und weitere zusätzliche Sicherheitshinweise werden nach der folgenden detaillierten Beschreibung der Zeichnungen detaillierter erläutert. Vor der Beschreibung der Zeichnungen und der weiteren detaillierten Beschreibung der Erfindung sollte noch festgehalten werden, dass diese Erfindung sich von den existierenden Erfindungen dieses Gebietes unterscheidet und versucht, das Problem der Schwingungen und des Pendelns („Schlingern“) auf eine komplett andere Art zu lösen. Die folgenden Absätze erklären die Unterschiede zwischen der vorliegenden Erfindung und vorherigen Erfindungen in diesem Gebiet basierend auf dem Stand der Technik. Alle anderen Erfindungen in diesem Gebiet stellen auf irgendeine Art die Schwingungen und das Pendeln („Schlingern“) fest verursacht entweder durch den Anhänger und/oder das Zugfahrzeug, sobald die Schwingungen und die Pendelbewegungen („Schlingerbewegungen“) komplett ausgeprägt sind. Die vollständig ausgeprägten Schwingungen und die Pendelbewegungen („Schlingerbewegungen“) sind für gewöhnlich in einem solchen Ausmaß, dass sie leicht innerhalb des Zugfahrzeuges als unangenehme und nicht steuerbare Schwingungen und Pendelbewegungen („Schlingerbewegungen“) wahrgenommen werden können, was bereits Angst und Sorge bei den Insassen des Zugfahrzeuges auslösen kann. Der nächste Schritt, den nahezu alle bereits bestehenden Erfindungen durchlaufen, ist die gleichzeitige Verringerung der Geschwindigkeit des Zugfahrzeuges und des Anhängers (gezogenes Fahrzeug ohne Eigenantrieb). Dies wird für gewöhnlich dadurch erreicht, dass die Bremsen sofort mindestens bei dem Zugfahrzeug angewendet werden und in manchen Fällen auch gleichzeitig bei dem Anhänger angewendet werden. Die Anwendung dieser Bremsen wird für gewöhnlich andauern, bis entweder die Schwingungen („Schlingern“) aufgehört haben, oder bis der Anhänger und das Zugfahrzeug vollständig zum Stehen gekommen sind. Dieses Verfahren, die Schwingungen durch das Anwenden von schweren Bremskräften versuchen zu stoppen, kann oft zu schlimmeren Schwingungen und ungewollten und nicht kontrollierbaren Richtungsänderungen des Anhängers und des Zugfahrzeuges führen. Diese ungewollten und ungeplanten Reaktionen können auch zu Unfällen führen, die andere Straßennutzer involvieren, da die Schwingungs- und Pendelmuster des Anhängers und des Zugfahrzeuges sich weiterentwickeln und vollständig unkontrollierbar werden, bis das Fahrzeug zu einem kompletten Stillstand kommt, sobald der ganze Schwung aufgebraucht ist. Unter gewissen Umständen, falls die Schwingungen und die Pendelbewegungen („Schlingern“) sich zu so einem Ausmaß und in einer solchen Intensität entwickeln, dass sie nicht steuerbar sind, kann dies dazu führen, dass der Anhänger und/oder das Zugfahrzeug umgeworfen werden. Der Hauptvorteil der vorliegenden Erfindung ist, dass es durch die Nutzung der neusten hardwarebasierten FPGA (Field Programmable Gate Array) SoC mit auf Technologie basierenden Dual Core ARM Cortex-A9 Prozessoren möglich ist, den ersten anfänglichen Beginn von Schwingungen und Pendelbewegungen („Schlingern“) festzustellen und zu identifizieren. Sobald diese anfänglichen Schwingungen und der anfängliche und fundamentale Beginn der Schwingungen („Schlingern“) festgestellt wurden, ist es möglich, die weitere Entwicklung der Schwingungen durch Verwendung von digital gesteuerten Bremskräften auf den Anhänger 7 (Zugfahrzeug ohne Eigenantrieb) zu stoppen, während gleichzeitig das Zugfahrzeug 1 auf eine digital gesteuerte Weise beschleunigt wird. Die neueste digital eingebettete FPGA Hardware ermöglicht die schnellstmögliche Datenverarbeitung und Kalman-Rauschfilterung durch das Ausführen eines Algorithmus auf der FPGA und das anschließende digitale Steuern der Brems- und Beschleunigungsaktionen auf den Anhänger 7 und das Zugfahrzeug 1, wie oben beschrieben. Die neueste FPGA Hardware ermöglicht es dem System, mit einer Geschwindigkeit zu arbeiten die über eine Größenordnung (10x oder mehr) schneller ist als die, die auf einem Mikrocontroller-Software-System allein möglich ist, in einer Verarbeitungsweise, die die Verarbeitung aller IMU-Daten parallel zur selben Zeit ermöglicht. Diese parallele Verarbeitungsweise verstärkt noch weiter die Leistung und daher das Endergebnis des Systems. Das in dieser Erfindung ausführlich beschriebene Grundsatzprinzip wurde vollständig getestet, verfeinert und bewiesen, indem ein Vierundzwanzig-Fuß-Boot (24) und eine Anhänger-Kombination (Gesamtlänge 31 Fuß) mit einem gebremsten Anhänger unter Verwendung einer Land Rover ® / Range Rover ® Kombination von mehr als sechstausendvierhundert (6400) Meilen gezogen wurden. Die Gesamtmasse des Bootes und des Anhängers betrugen mehr als drei Komma vier (3,4) Imperiale Tonnen. Das Boot und der Anhänger wurden mehrfach vom Süden Englands bis in den Süden Frankreichs und wieder zurück nach England gezogen. Die Erfindung wird anschließend im Detail unter Bezugnahme der folgenden Bezugszeichen beschrieben.
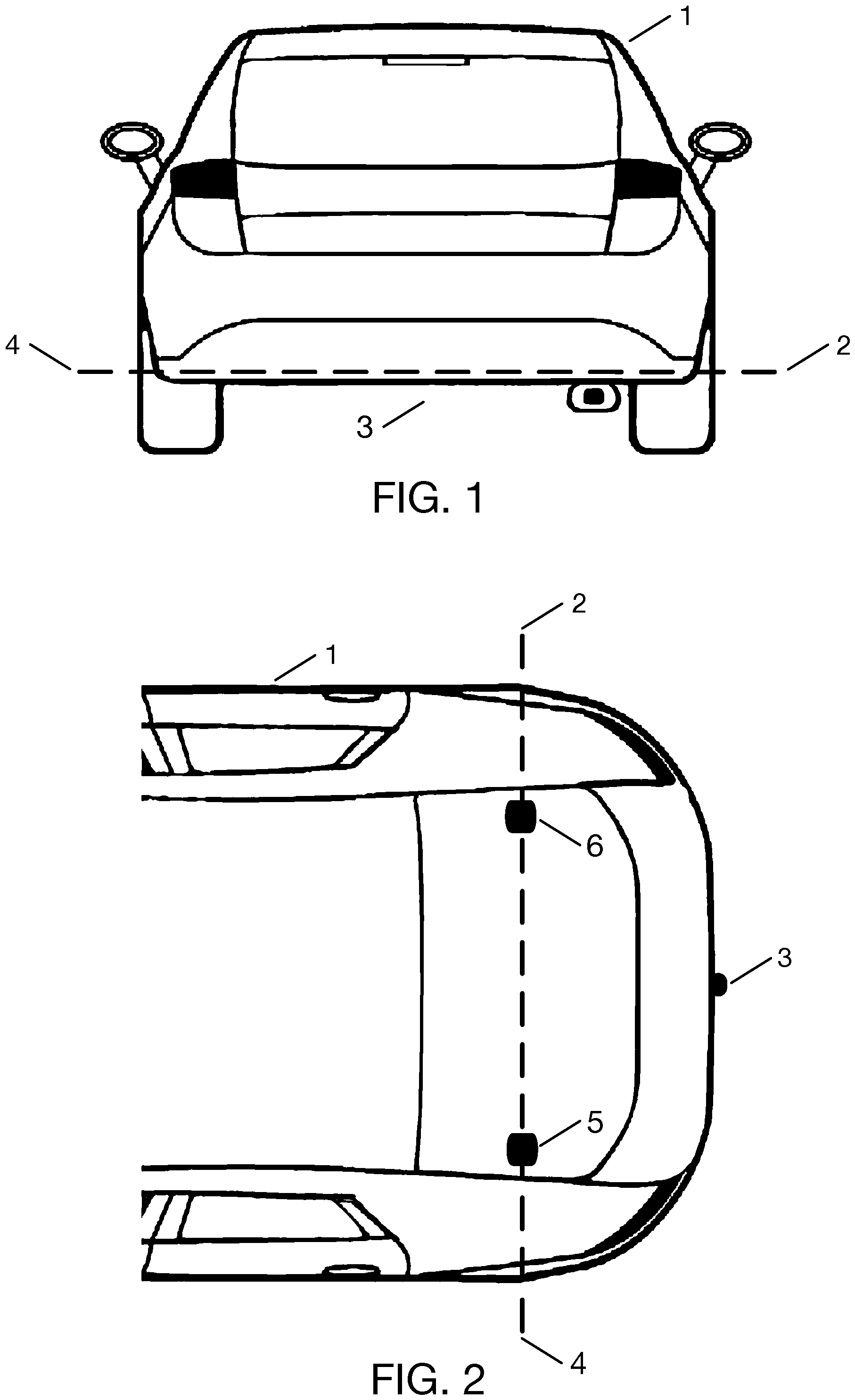
Das bevorzugte System verwendet die Kombination von digitaler Hardware in Form von FPGA 22 (Field Programmable Gate Arrays), die mehrere Prozesse parallel zueinander durchführen. Zeitgleich mit den parallel zueinander laufenden digitalen Hardwareprozessen wird Software sequentiell auf Dual ARM Cortex-A9 Prozessoren laufen. Das vollständig autonome Überwachungs- und Steuerungssystem versucht den anfänglichen Beginn und die weitere Entwicklung von Schwingungen und Pendelbewegungen („Schlingern“) des Anhängers 7 und des Zugfahrzeuges 1 durch die Verwendung der neusten digitalen hardwarebasierten Technologien (FPGA 22), welche kontinuierlich die Bewegungen des Anhängers 7 und des Zugfahrzeuges überwachen, zu verhindern, zur selben Zeit wie der Anhänger gezogen wird. Die auf dem FPGA 22 basierende Hardware der Zentralsteuerung 20 arbeitet mindestens eine Größenordnung (10x) schneller als andere lediglich auf Software basierende Mikrocontrollersysteme. Die Bewegungen des Zugfahrzeuges 1 und des Anhängers 7 werden kontinuierlich in Echtzeit durch mindestens vier IMUs 5, 6, 14 und 17überwacht, die Beschleunigungsmesser aufweisen neben anderen Sensortypen. Eine weitere IMU 25, die sich in der Zentralsteuerung 20 befindet, wird ebenfalls überwacht. Alle IMUs 5, 6, 14, 17 und 25 kommunizieren mit der Zentralsteuerung 20 durch ein Bluetooth Low Energy Version 5.0 Mesh-Netzwerk (oder eine aktuellere Ausgabe davon). Der Beschleunigungsmesser stellt ein Minimum von kursabweichenden, rollenden und kippenden Bewegungen bei dem Anhänger 7 und dem Zugfahrzeug 1 gleichzeitig fest. Die digitalen Daten aller IMUs werden parallel zueinander in Echtzeit auf dem FPGA 22 (Field Programmable Gate Array) verarbeitet, um die große Menge an Daten gleichzeitig zu verarbeiten und zu filtern. Herkömmliche Systeme könnten versuchen, diese große digitale Datenmenge mit einem softwarebasierten Prozessor wie einem Mikrocontroller zu verarbeiten, der die Daten auf eine sequentielle Weise verarbeiten würde, die mindestens eine Größenordnung langsamer wäre (10x langsamer). Die Verarbeitungsgeschwindigkeit des Systems ist besonders wichtig, da es notwendig ist, um die Schwingungen und Pendelbewegungen („Schlingerbewegungen“) des Anhängers 7 und des Zugfahrzeuges 1 so schnell wie möglich vor dem Auftreten von vollständig entwickelten Schwingungen festzustellen und zu kontrollieren, da es um einiges schwieriger ist, sicher zu kontrollieren und schnell zu beheben. Die Zentralsteuerung 20 des Systems empfängt, protokolliert und speichert eine Vielzahl von anderen Daten, die die Geschwindigkeit, die Höhenlage, die Vibrationen, die magnetische Ausrichtung, die GPS-Daten (Global Positioning System), die Ortszeit und die Temperatur umfassen. Diese Daten werden auf einer F-RAM (die sich auf der ARM Cortex M4 Mikrocontroller Platine 23 befindet) gespeichert, wobei es sich um eine Art von nichtflüchtigem ferroelektrischen Random Access Memory handelt. Die fast uneingeschränkten 100 Billionen Lese- und Schreibzyklen dieser Art von Speicher stellen eine fast unendliche Haltbarkeit und Sicherheit der gespeicherten Daten sicher. Bestimmte Daten werden mit einem Kalman-Filter bearbeitet, um Geräusche zu verringern und die Qualität der Signale vor der Systembearbeitung und Analyse dieser zu verbessern. Das System ist mit dem CAN Bus Netzwerk des Zugfahrzeuges verbunden, um Daten und Informationen von dem Zugfahrzeug zu empfangen und leitet Daten zu dem Zugfahrzeug zurück. Diese Daten können auch mit einem Mobilfunknetz, wie in Eine bevorzugte Ausführungsform des Systems wird jetzt detailliert unter Bezugnahme der Zeichnungen beschrieben, um die Funktionsweise des digitalen hardwarebasierten Systems (FPGA 22) und das Verfahren zum Verhindern des Beginns von Schwingungen eines Anhängers und eines Zugfahrzeuges und die Steuerung davon vollständig zu erläutern. Die folgenden fünfzehn Figuren und Beschreibungen erläutern eine mögliche Ausführungsform der Erfindung im Detail. Eine Vielzahl von möglichen Ausführungsformen dieses Systems existieren und einige Alternativen werden innerhalb der folgenden Beschreibung erläutert. Die Bremsaktoren werden von einer wiederaufladbaren Lithium-Ionen-Zelle angetrieben, die sich innerhalb jedes Bremsaktors befindet. Die Lithium-Ionenzellen werden kontinuierlich durch die Stromverbindung des Anhängers zum Zugfahrzeug aufgeladen. Die Ladekabel 37 und 40 der linken und rechten Aktoren sind jeweils in den Die Überwachung wird fortgesetzt und falls der Beginn von Schwingungen (Pendel- und Schlingerbewegungen) von den IMUs 14 und 17, die sich auf dem Anhänger 7 befinden, oder von den IMUs 5 und 6, die sich im Zugfahrzeug 1 befinden, festgestellt wird, dann wird das System sofort Anti-Pendel-Verfahren (Anti-Schlingern“) einleiten, um zu versuchen, die Bewegungen des Anhängers oder des Zugfahrzeuges so schnell und so sicher wie möglich zurück in eine laterale Orientierung zu bringen. Die Anti-Pendel-Verfahren („Anti-Schlingern“) werden in der Hardware der FPGA 22 (Field Programmable Gate Array) SoC ZYNQ-7000 unter der Verwendung einer Vielzahl von Logikschaltungen durchgeführt, wobei die Verarbeitung auf parallele Weise, im Gegensatz zu einer sequentiellen Weise wie bei Software stattfindet. Der unmittelbare Vorteil der parallelen Verarbeitung des FPGA ist eine Geschwindigkeitserhöhung, die um eine Größenordnung (10x) schneller ist, als wenn die Verarbeitung nur sequentiell in einem Mikrocontroller-basierten Prozessor durchgeführt würde. Eine Beschreibung des im FPGA SoC ZYNQ-7000 ausgeführten Parallelalgorithmus wie in Sobald das System einen anfänglichen Beginn von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) festgestellt hat, die von irgendjemandem oder einer Kombination der IMUs 14, 17, 5 und 6 innerhalb des Systems festgestellt worden sein könnten, festgestellt hat, werden die Anti-Pendel-Verfahren („Anti-Schlinger-Verfahren“) initiiert. Das System wird dann alle IMUs 14, 17, 5 und 6 weiter überwachen, um festzustellen, ob die vorher in Schritt 49 gestarteten Verfahren des Flussdiagramms in Die Zentralsteuerung 20 des Systems kommuniziert in Schritt 49B des Flussdiagramms aus Die verarbeiteten und gefilterten (Kalman) Daten der IMUs durchlaufen dann sofort einen Schwingungs-Erkennungs-Algorithmus, um festzustellen, ob eine Spur von Schwingungen (Kursabweichung) oder der Beginn davon vorliegt. Angenommen, dass Schwingungen (Kursabweichung) erkannt werden, kommuniziert die Zentralsteuerung sofort mit den Bluetooth BLE V5.0-Mesh-Netzwerk drahtlosen Bremssteuerungen 15 und 16 (oder der aktuellsten Entsprechung davon) des Anhängers und wendet die Anti-Pendel-Verfahren („Anti-Schlinger-Verfahren“) an, die das Betätigen der Anhängerbremsen durch die Verwendung des Anhänger-Brems-Algorithmus, durchgeführt innerhalb der FPGA-Hardware, während die Geschwindigkeit des Zugfahrzeuges inkrementell unter Verwendung des Zugfahrzeug-Beschleunigungs-Algorithmus, durchgeführt innerhalb des FPGA 22, erhöht wird, bis die Schwingungen sich verringern oder ganz stoppen. Eine genauere Beschreibung der Ereignissequenz dieses Verfahrens ist in den Flussdiagrammen in Die Paddle 54 und 55 ermöglichen es dem Fahrer des Zugfahrzeuges 1, die Anwendung des Anhänger-Brems-Systems 7 manuell zu steuern, und die Geschwindigkeit des Zugfahrzeuges 1 zu erhöhen, um die Schwingungen, Pendelbewegungen („Schlingerbewegungen“) des Zugfahrzeuges 1 und des Anhängers 7 zu verringern und zu stoppen. Das selbstständige System kann so programmiert werden, dass es den anfänglichen Beginn und die weitere Entwicklung der Schwingungen des Anhängers und/oder Zugfahrzeuges, ohne direktes Eingreifen des Fahrers, vollständig überwacht und steuert. Die selbstständige Steuerung dieser bestimmten Ausführungsform wurde detailliert in den vorherigen Absätzen beschrieben. Das System kann auch durch die direkte Nutzung der zwei Paddle-Steuerungen 54 und 55 gesteuert werden, wie am Lenkrad in Die Paddle-Steuerungen 54 und 55 befinden sich jeweils auf der linken und rechten Seite des Fahrers am Lenkrad und arbeiten wie folgt. Die rechte Paddle-Steuerung 54 steuert die Anwendung des vorsichtigen und allmählichen Bremsens des Anhängers 7. Die Paddle-Steuerung 55 links vom Fahrer steuert die Anwendung der vorsichtigen und allmählichen Beschleunigung des Fahrzeuges 1 (unter der Kontrolle des Sicherheitssystems). Die Steuerung ermöglicht es dem Fahrer des Zugfahrzeuges 1, mit der Unterstützung der Zentralsteuerung 20, den Bremsvorgang auf den Anhänger 7 manuell anzuwenden und gleichzeitig manuell die Beschleunigung des Zugfahrzeuges 1 zu erhöhen, um die Schwingungen, Pendelbewegungen („Schlingerbewegungen“) des Zugfahrzeuges 1 und des Anhängers 7 zu verringern. Wie vorher erläutert, stellt das System immer noch sicher, dass es sicher ist, die Geschwindigkeit des Zugfahrzeuges 1 durch Verwendung des adaptiven Tempomats und/oder LIDAR-Systems, die an das Zugfahrzeug 1 angepasst sind, zu erhöhen. Der Bremsvorgang, der nur auf den Anhänger 7 angewendet wird, wird durch das Hardwarebasierte FPGA 22 (Field Programmable Gate Array) SoC ZYNQ-7000 des Systems gesteuert, während das System die Beschleunigung des Zugfahrzeuges 1 schrittweise erhöht. Während die Paddle-Steuerungen 54 und 55, die sich auf dem Lenkrad befinden, einen gewissen Grad an manueller Steuerung des Systems bieten, ist die Funktion und Steuerung letztendlich immer noch automatisiert, um Sicherheit, Geschwindigkeit und Leistung zu gewährleisten, die durch ein vollständig manuelles System nicht erreichbar wären. Es ist möglich, die Paddle-Steuerungen zu deaktivieren. Das System kann betriebliche Daten, Nachrichten und Warnungen über geografische Orte darstellen, die dazu neigen, Schwingungen und Pendelbewegungen („Schlingerbewegungen“) bei dem Anhänger 7 und dem Zugfahrzeug 1 auszulösen. Die zuvor genannte Art von Informationen und Nachrichten können auf dem mit dem Internet verbundenen Tablet 57 des Fahrzeuges durch Nutzung einer Webbrowserbasierten Schnittstelle dargestellt wird. Das System kann so eingestellt werden, dass ein Bild des Anhängers 7 und des Zugfahrzeuges 1 dargestellt wird, um jeden Anfang von Schwingungen („Schlingerbewegungen“) in Echtzeit zum Überprüfen für Insassen des Zugfahrzeuges darzustellen. Das Display oder Tablet ermöglicht auch die Änderung und die Eingabe von Systemparametern, die sofort in die Zentralsteuerung 20 des Systems hochgeladen werden. Diese Änderungen können über den Touchscreen des mit dem Internet verbundenen Displays im Zugfahrzeug durchgeführt werden, oder mit einem geeigneten drahtlos mit dem Internet verbundenen Tablet im Fahrzeug. Das Display des Fahrzeuges und das Tablet 57 können auch zum Überprüfen vorheriger Schwingungsvorkommnisse („Schlingervorkommnisse“), und für die Darstellung des aktuellen Zustandes der Schwingungen („Schlingerbewegungen“) des Anhängers und des Zugfahrzeuges in Echtzeit, während der Anhänger gezogen wird, verwendet werden. Die vorher erwähnten Informationen werden entweder in einem Webbrowser-Fenster oder einer geeigneten App (Application), die auf dem Display oder auf dem drahtlos verbundenen Tablet des Zugfahrzeuges arbeitet, dargestellt. Eine weitere Ausführungsform des vorliegenden Systems ermöglicht es, das System mit einer auf einem Smartphone 57 laufenden geeigneten App zu überwachen, zu steuern und das Ziehen zu überprüfen (nach dem Vorkommnis). Die App auf dem Smartphone 57 könnte entweder auf einem iOS ® oder Android ® Betriebssystem, oder einer ähnlichen, aktuelleren Entsprechung davon, laufen. Ebenfalls kann die App auf einem Windows ® basierten Smartphone 57 oder Tablet-Gerät 57 (iOS ®, Android ® und Windows ® Betriebssystem) laufen. Die Verbindung zu dem Smartphone wäre entweder eine Bluetooth Low Energy (BLE V5 oder die neuste Entsprechung davon) oder WiFi Verbindung zwischen dem Gerät und der Zentralsteuerung 20. Eine bestimmte Ausführungsform dieses Systems ermöglicht es, die Daten und geografische Positionsinformationen zurück an einen Zentralserver zu senden, mit den Informationen, die von der Zentralsteuerung 20 und den IMUs 5, 6, 14 und 17 gesammelt wurden, die sich im Anhänger und dem Zugfahrzeug finden. Diese Informationen können von dem Zugfahrzeug 1 über ein Mobilfunknetz gesendet werden und können sofort auf einer Cloudbasierten geografischen Datenbank 61 gespeichert werden, die mit anderen Nutzern der Cloudbasierten geografischen Datenbank 61 geteilt werden können. Eine weitere Erläuterung dieses Teils der Ausführungsform wird unter Bezugnahme der nächsten Das Zugfahrzeug 1 sendet und empfängt Daten auf bidirektionale Weise 59 unter der Verwendung eines herkömmlichen Mobilfunkturmes 58, der sich in der Umgebung des Zugfahrzeuges 1 befindet. Die Daten werden dann auf bidirektionale Weise 60 über einen Mobilfunkturm 58 an die Cloudbasierte geografische Datenbank 61 wieder zu der entfernten Speicherdatenbank weitergeleitet. Die übertragenen Daten 59 des Zugfahrzeuges 1 enthalten GPS-Koordinaten (Global Positioning System) von dem GPS Kommunikationsmodul 21 innerhalb der Zentralsteuerung 20, zusammen mit den Sensordaten der IMUs 5, 6, 14, 17 und 25, die kurz vor dem anfänglichen Beginn der Schwingungen („Schlingerbewegungen“) des Anhängers aufgezeichnet wurden, sowie weitere Daten, bis die Schwingungen („Schlingerbewegungen“) nachlassen oder vollständig stoppen. Die an die Cloudbasierte Datenbank 61 gesendeten und darin gespeicherten Daten weisen auch Daten bezüglich dem Anhänger 7 und dem Zugfahrzeug 1 in Bezug auf die Bremssteuersignale des Anhängers und die Beschleunigungssteuereingaben des Zugfahrzeuges auf, die notwendig sind, um die Schwingungen („Schlingerbewegungen“) des Anhängers 7 und des Zugfahrzeuges 1 zu stoppen. Die zuvor genannten Daten 59 werden anschließend über einen Mobilfunkturm 58 auf bidirektionale Weise 60 unter der Verwendung eines Mobilfunknetzes an eine entfernte Cloudbasierte geografische Datenbank 61 weitergeleitet, wie in Die Cloudbasierte geografische Datenbank 61 speichert und sammelt kontinuierlich Daten von mehreren geeignet ausgerüsteten Zugfahrzeugen, die ähnlich sind zu dem Zugfahrzeug 1 und dem Anhänger 7, die oben beschrieben werden. Die Cloudbasierte geografische Datenbank 61 sammelt und sortiert über einige Zeit eine große Datenmenge aus einer großen Anzahl von verschiedenen geografischen Orten innerhalb einer Vielzahl von verschiedenen Ländern. Der Hauptvorteil eines solchen Systems fuer jeden damit über ein oben beschriebenes Mobilfunknetz verbundenen Zugfahrzeugtyp 1 ist, dass der Fahrer jedes geeignet ausgerüsteten Fahrzeuges gewarnt wird, wenn er oder sie sich einem geografischen Ort nähert, der möglicherweise vorher einmal Schwingungen („Schlingerbewegungen“) ausgelöst, oder dazu beigetragen hat, diese auszulösen. Der Ort kann eine schlechte Straßenoberfläche aufweisen oder an einem steilen Anstieg (Hügel oder Berge) liegen, oder eine Kombination daraus. Das System zeigt dem Fahrer eine Warnmeldung auf dem Armaturenbrett des Zugfahrzeuges an, die das System an das Display des Fahrzeuges übermittelt, da die Zentralsteuerung 20 eine CAN Bus Netzwerk-Schnittstelle aufweist. Das System ist auch in der Lage, wie oben beschrieben, die Nachricht auf dem mit dem Internet verbunden Display/Tablet 57 oder einem Smartphone mit einem Webbrowser oder einer App, die drahtlos mit dem System verbunden sind, darzustellen. Die vorliegende Ausführungsform der Erfindung verwendet zwei IMUs, die sich auf dem Anhänger 7 befinden, und zwei weitere, die sich in einer Reihe mit den Hinterrädern des Zugfahrzeuges 1befinden. Eine weitere IMU 25 befindet sich innerhalb der Zentralsteuerung 20 und liefert zusätzliche Daten an das FPGA 22 innerhalb der Zentralsteuerung 20. Die parallele Rechenleistung des hardwarebasierten FPGA 22 und die NEON Verarbeitungsfähigkeit innerhalb der Dual Core ARM Cortex-A9 Prozessoren innerhalb des Gehäuses des FPGA 22 ermöglicht, falls benötigt, die Verarbeitung weiterer IMU Eingaben. Ein Anhänger mit zwei oder mehreren Achsen, oder einem Radstand mit erweiterter Länge könnte zwei oder mehrere IMUs benötigen, die sich entlang der Zentrallinie der zweiten oder zusätzlichen Achsen befinden. Die IMUs sind durch eine Bluetooth Low Energy (BLE V5.0 oder die neuste Entsprechung davon) Funkverbindung verbunden, die ein Mesh-Netzwerk und einen erweiterten Arbeitsbereich im Vergleich zu einer herkömmlichen Bluetooth Low Energy Funkverbindung bietet. Die zusätzlichen IMUs können daher leicht drahtlos mit der Zentralsteuerung verbunden und von dieser überwacht werden. Das System ermöglicht die Weiterleitung der zusätzlichen IMU-Signale an den Kalman Filter 22 und die Verarbeitung mit den anderen IMU-Daten durch die Schwingungserkennungs-, Anhänger-Brems-, und Zugfahrzeugalgorithmen, die das System steuern. Die anderen Teile des Systems, wie die Bremsaktoren 15 und 16 des Anhängers arbeiten auf dieselbe Weise wie bei Systemen mit einer geringeren Anzahl IMUs. Das System ermöglicht auch die Bedienung weiterer Bremsaktoren, die bei Anhängern mit mehreren Achsen benötigt werden könnten, da diese vier oder mehr Bremsaktoren aufweisen können. Mehrere Bremsaktoren mit einzigartigen Identifikationsnummern der BLE5 /WiFi Verbindungen können durch die Zentralsteuerung 20 bedient werden. Die einzigartigen Identifikationsnummern gewährleiten auch einen Hohen Grad an Sicherheit, und stellen dadurch sicher, dass die Bremsaktoren nicht vorsätzlich oder aus Versehen von einer Steuerung bedient werden können, die sich außerhalb des Systems befindet. Die IMUs 5, 6, 14, 17 und 25 weisen alle Altimeter-Module in ihnen auf. Die Höhendaten werden kontinuierlich während dem Ziehen zurück an die Zentralsteuerung 20 gesendet. Diese Daten ermöglichen es dem System festzustellen, ob sich die Höhe während der Bewegung erhöht oder verringert. Diese Informationen sind nicht nur für geografische Anwendungen nützlich und werden regelmäßig an die Cloudbasierte geografische Datenbank 61 gesendet, aber auch für die primäre Sicherheitsanalyse verwendet. Das System wird feststellen, wenn das Zugfahrzeug und der Anhänger an Höhe verlieren (Verringern der Höhe), da dies höchstwahrscheinlich gemäß der Sinkgeschwindigkeit darauf hindeutet, dass das Zugfahrzeug 1 und der Anhänger 7 auf einer starken Steigung gefahren werden (Bergstraße oder eine steil nach unten gerichteten Straße). Bergstraßen und steil nach unten gerichtete Straßen sind oft der Vorläufer der Entwicklung von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) eines Anhängers, da der Schwung des Anhängers zu der Entwicklung des anfänglichen Beginns und der schnellen weiteren Entwicklung von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) führen kann. Das System ist dazu programmiert alle Höhenangaben dauerhaft zu überwachen und, falls eine starke Verringerung der Höhe über einen kurzen Zeitraum erkannt wird, die eine schnell abfallende Fahrsituation kennzeichnet, sicherzustellen, dass es bereit ist, angemessenen Maßnahmen zu ergreifen, wenn der anfängliche Beginn von Schwingungen erkannt wird. Dies ist sehr wichtig, da es schwieriger ist die Schwingungen („Schlingerbewegungen“) zu verringern, wenn der Anhänger 7 und das Zugfahrzeug 1 sich auf einer Straße mit einer steilen abwärts gerichteten Neigung befinden. Das System kann auch, falls erwünscht, so programmiert werden, dass es den Fahrer warnt, wenn er in einer Gegend mit solchen Straßen mit abwärts gerichteten Neigungen fährt. Dies ermöglicht es dem Fahrer seine Zuggeschwindigkeit schrittweise zu verringern, um dadurch hoffentlich das Risiko von Schwingungen und Pendelbewegungen („Schlingerbewegungen“), vor dem natürlichen Beginn davon, zu verringern, Die aufgezeichneten Daten, die auf die Cloudbasierte geografische Datenbank 61 hochgeladen werden, ermöglichen es anderen Straßennutzern mit dem selben System und derselben Datenbank auch vorgewarnt zu werden, wenn sie sich einem Bereich nähern, der dafür bekannt ist, Schwingungen („Schlingerbewegungen“) aufgrund einer Straße mit einer stark abwärts gerichteten Neigung (Straßenneigungswinkel) bei dem Anhänger auszulösen. Die vorliegende Ausführungsform der Erfindung oder ähnliche Ausführungsformen der Erfindung stellen sicher, dass der Fahrer des Zugfahrzeuges 1 und des Anhängers 7 jede Schleppreise in Sicherheit und mit Komfort abschließen kann. Wie zuvor erwähnt kann das System auf vollständige autonome Weise, ohne Eingreifen des Fahrers arbeiten. Das System kann auch durch die Verwendung der Steuerungs-Paddle 54 und 55 am Lenkrad 53 ausser Kraft gesetzt werden, wenn dies der Fahrer so wünscht. Die Paddle-Steuerungen 54 und 55 arbeiten zusammen mit der Zentralsteuerung 20 und anderen Systemkomponenten, um sicherzustellen, dass die Sicherheit des Zugfahrzeuges 1 und des Anhängers 7 zusammen mit der Sicherheit der anderen Straßennutzer von zentraler Bedeutung sind. Das System sammelt immer noch Daten an und sendet diese an die Cloudbasierte geografische Datenbank 61, während das System über die Paddle-Steuerungen 54 und 55 am Lenkrad 53 bedient wird. Die Daten werden mit einem Vermerk aufgezeichnet, dass das System momentan über den manuellen Override-Modus bedient wird. Das mit dem Internet verbundene Display, Table oder Smartphone 57 des Fahrzeuges mit einem Webbrowser oder einer geeigneten App (Application) ermöglicht es dem Fahrer seine Steuerungsleistung im Override-Modus zu überprüfen. Das System kann so implementiert werden, dass die Zentralsteuerung 20, die sich im Zugfahrzeug 1 befindet und an dieses angepasst ist, für mehr als einen Anhänger verwendet werden kann. Das System kann darauf programmiert werden, eine feste Anzahl von unterschiedlichen Anhängern mit IMU-Sensor und Altimeter-Modulen 26 und drahtlosen Bremsaktoren 15 und 16 zu erkennen. Das Zugfahrzeug 1 kann individuell mit mehreren Anhängern kommunizieren, damit ein Zugfahrzeug dazu genutzt werden kann, mehrere Anhänger mit allen Sicherheitsvorteilen des Systems zu ziehen. Das System (Zentralsteuerung 20) kann offensichtlich zu jeder Zeit nur mit einem Anhänger verbunden sein und diesen steuern. Die aufgezeichneten Daten der unterschiedlichen Anhänger werden im Webbrowser und/oder der Application durch eine einzigartige Nummer oder durch einen einzigartigen Namen, die jedem einzelnen Anhänger zugeordnet werden, erkennbar, falls mehr als ein Anhänger mit einem einzigartigen Zugfahrzeug 1 gezogen wird. Alle aufgezeichneten Daten und Betriebseinstellungen werden für jeden Anhänger einzeln gespeichert, so dass ein schneller Ankupplungsvorgang durchgeführt werden kann, ohne dass Zeit für das Reprogrammieren der Parameter der unterschiedlichen Anhänger verschwendet wird, was auch gefährlich werden kann, sollte ein Fehler gemacht werden. Die vorliegende Ausführungsform des Systems und andere ähnliche alternative Ausführungsformen ermöglichen es dem System für eine Vielzahl von unterschiedlichen Arten und Größen von Zugfahrzeugen und Anhängern genutzt zu werden, alle mit ähnlicher vorteilhafter Sicherheit und Komfort. Eine digitale, selbstständige hardwarebasierte FPGA (Field Programmable Gate Array) Vorrichtung und Verfahren zum Verhindern des anfänglichen Beginns von Schwingungen und Pendelbewegungen („Schlingerbewegungen“) und die darauffolgende Steuerung davon. Bei der Vorrichtung handelt es sich um ein Erkennungs- und Steuerungsverfahren für jeden bereiften Anhänger, der sich vom Zugfahrzeug lösen lässt. Das System verwendet einen Kalman-Filter um digitale Daten von mehreren drahtlosen IMUs (Inertial Measurement Units) zu verarbeiten, die sich auf dem Anhänger und dem Zugfahrzeug befinden und steuert anschließend digital die Anwendung und Überwachung des gleichzeitigen Bremsens des Anhängers, während das Zugfahrzeug auf sichere Weise beschleunigt wird, um schnell zu versuchen, alle Schwingungen und Pendelbewegungen („Schlingerbewegungen“) zu verringern und zu stoppen. Das System weist eine Reihe anderer zusätzlicher Sicherheitsmaßnahmen auf. Verfahren zum Verhindern des anfänglichen Beginns und der weiteren Entwicklung von Schwingungen, Pendel- und Schlingerbewegungen des Anhängers und des Zugfahrzeugs, wobei die Bewegungen des Anhängers und des Zugfahrzeuges kontinuierlich durch eine digitale Hardware-basierte FPGA Zentralsteuerung (Field-Programmable Gate Array) überwacht werden, die den anfänglichen Beginn von Schwingungen, Pendel- und Schlingerbewegungen, die im Anhänger und im Zugfahrzeug vorhanden sind, indem mehrere IMUs, Inertial-Messeinheiten, die am Anhänger und am Zugfahrzeug angebracht sind, verwendet werden und wenn anfänglich Schwingungen und Pendel- und Schlingerbewegungen auftreten, die Geschwindigkeit des Zugfahrzeugs automatisch erhöht wird, während die simultane Anwendung der Anhängerbremsung sofort auf die Anhängerreifen übertragen wird, ohne den Einsatz der Zugfahrzeugsbremsen. Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Digitale hardwarebasierte Vorrichtung zum Verhindern des anfänglichen Beginns und der weiteren Entwicklung von Schwingungen, Pendel- und Schlingerbewegungen des Anhängers und Zugfahrzeugs, aufweisend:
Digitale hardwarebasierte Vorrichtung gemäß Stand der Technik
Zusammenfassende Beschreibung der Erfindung
Figurenliste
Beschreibung der bevorzugten Ausfuehrungsform
- eine drahtloses Bluetooth Low Energy Version 5.0 Netzwerk oder die aktuellste Entsprechung davon, Inertial-Messeinheiten und Höhenmesser-Module mit IP68 Klassifizierung, die sich auf dem Zugfahrzeug und dem Anhänger entlang einer lateralen Achse zwischen den Hinterreifen des Zugfahrzeugs und den Anhängerreifen entlang einer lateralen Achse auf der Radachse befinden; und
- eine Zentralsteuerung die sich in dem Zugfahrzeug befindet und ein Bluetooth Low Energy Version 5.0 Kommunikationsmodul oder die aktuellste Entsprechung davon, mit WiFi, ein Intertial-Messeinheitensensormodul, ein GPS-Kommunikationsmodul, ein FPGA SoC ZYNQ 7000 Serie mit Dual ARM ® Cortex-A9 Prozessoren oder entsprechende Geräte vom Typ FPGA SoC und eine ARM Cortex M4 Mikrosteuerung mit einem CAN-Bus-Netzwerkschnittstellenmodul oder ähnliche entsprechende Mikrosteuerungen mit ähnlichen Spezifikationen aufweist; und
- zumindest ein Paar drahtloser vernetzter Bluetooth Low Energy Version 5.0 oder aktuellste Entsprechung davon, ausgestattet mit elektrischen Bremsaktoren mit WiFi Kommunikation, aufladbaren Batterien und Akkus, wobei jeder drahtlose, elektrische Bremsaktor seine eigene einzigartige Identifikationsnummer zur drahtlosen Sicherheit aufweist.
- ein Paar von Paddle-Schaltern, die am Steuerrad des Zugfahrzeuges angebracht sind, welche über das CAN-Bus-Netzwerk mit Zentralsteuerung des Zugfahrzeuges verbunden sind.