VEHICLE CONTROL DEVICE
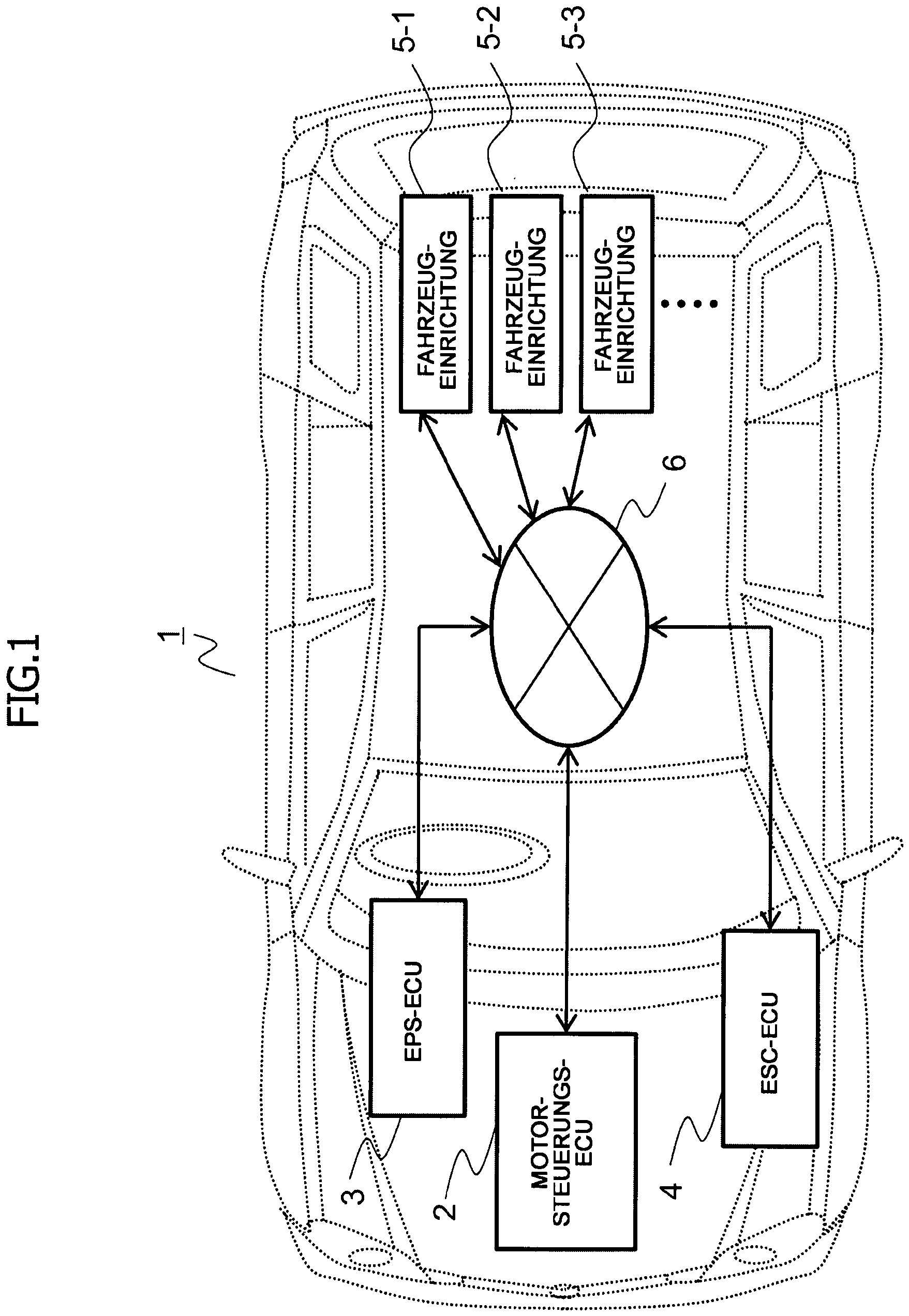
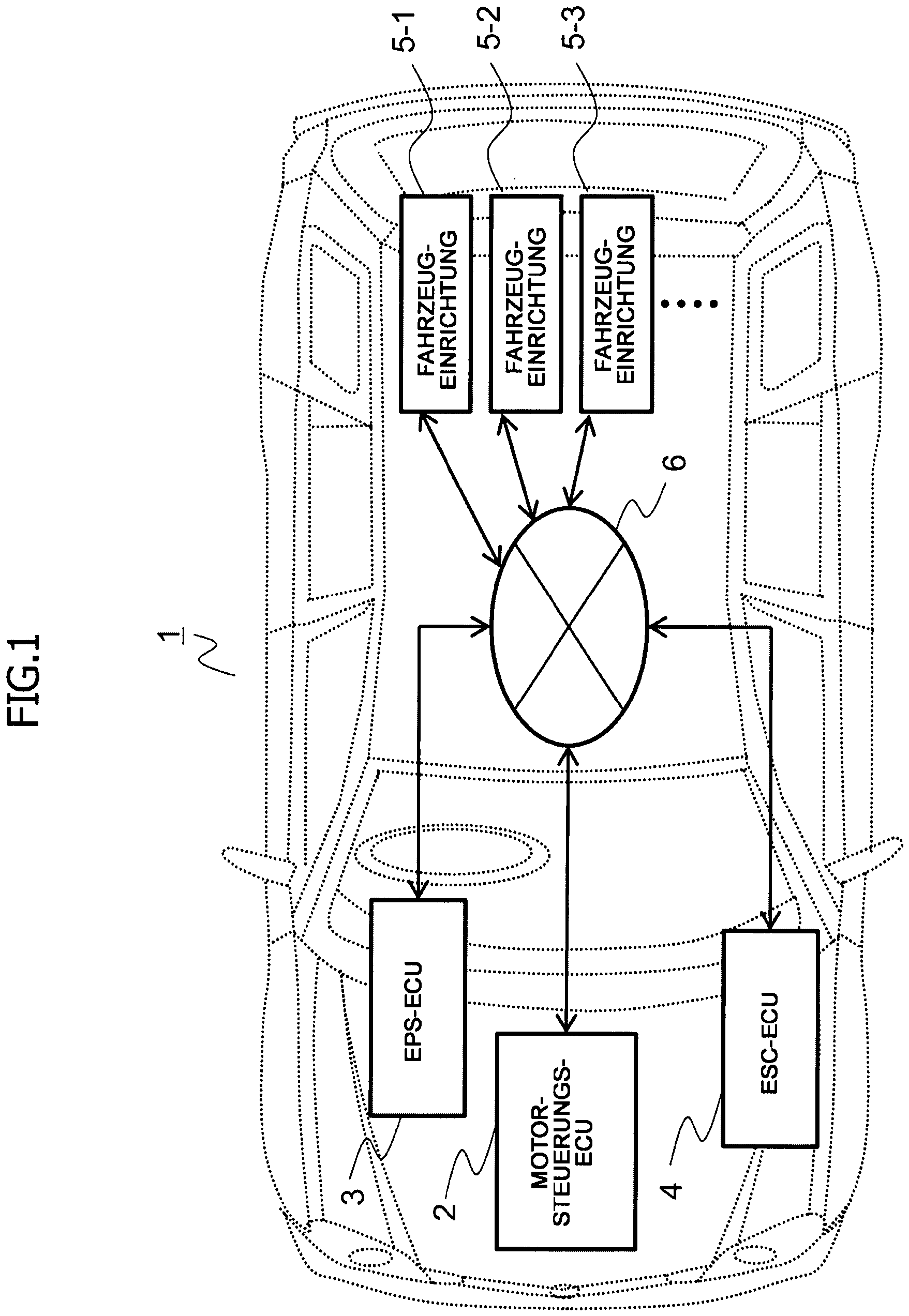
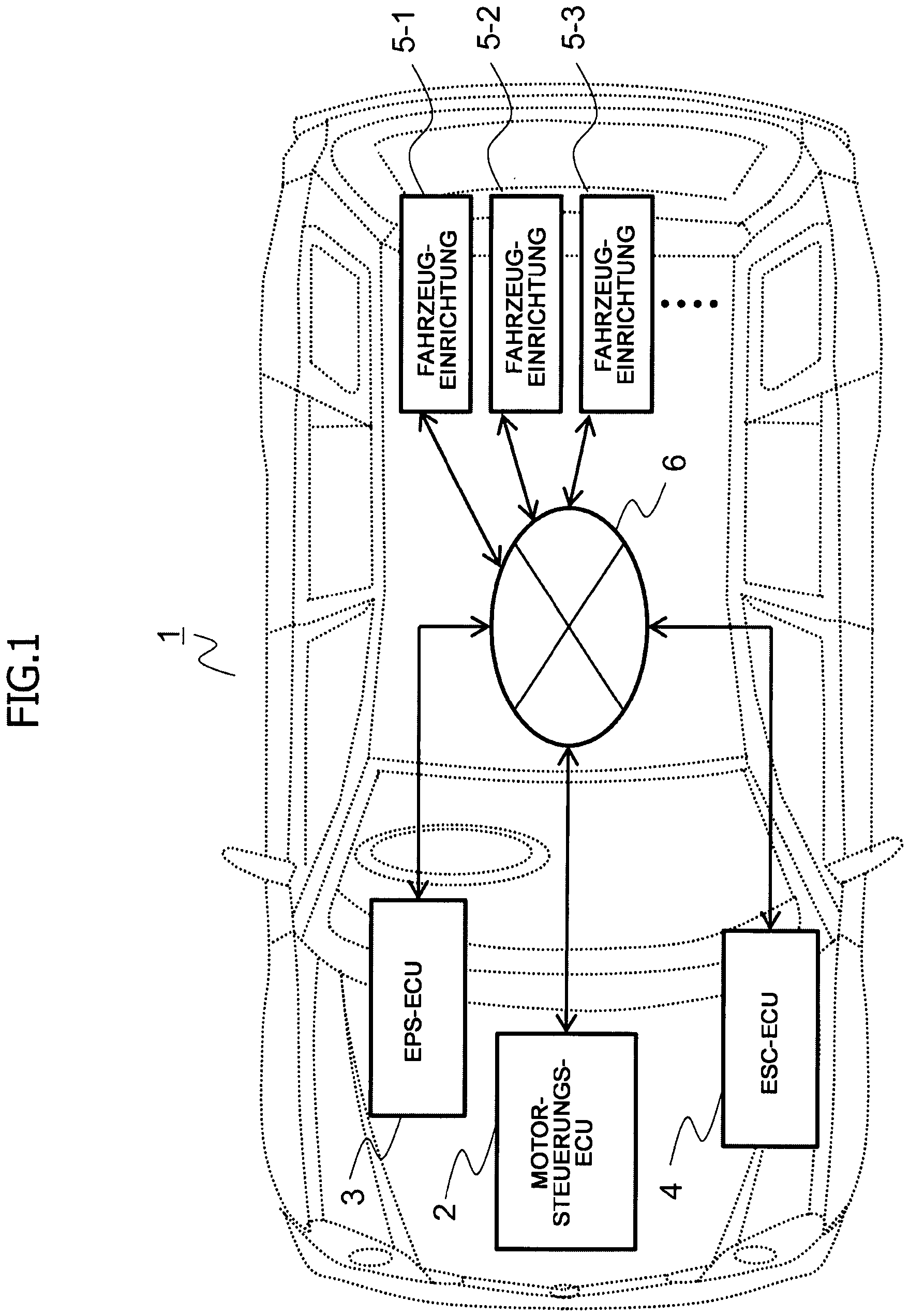
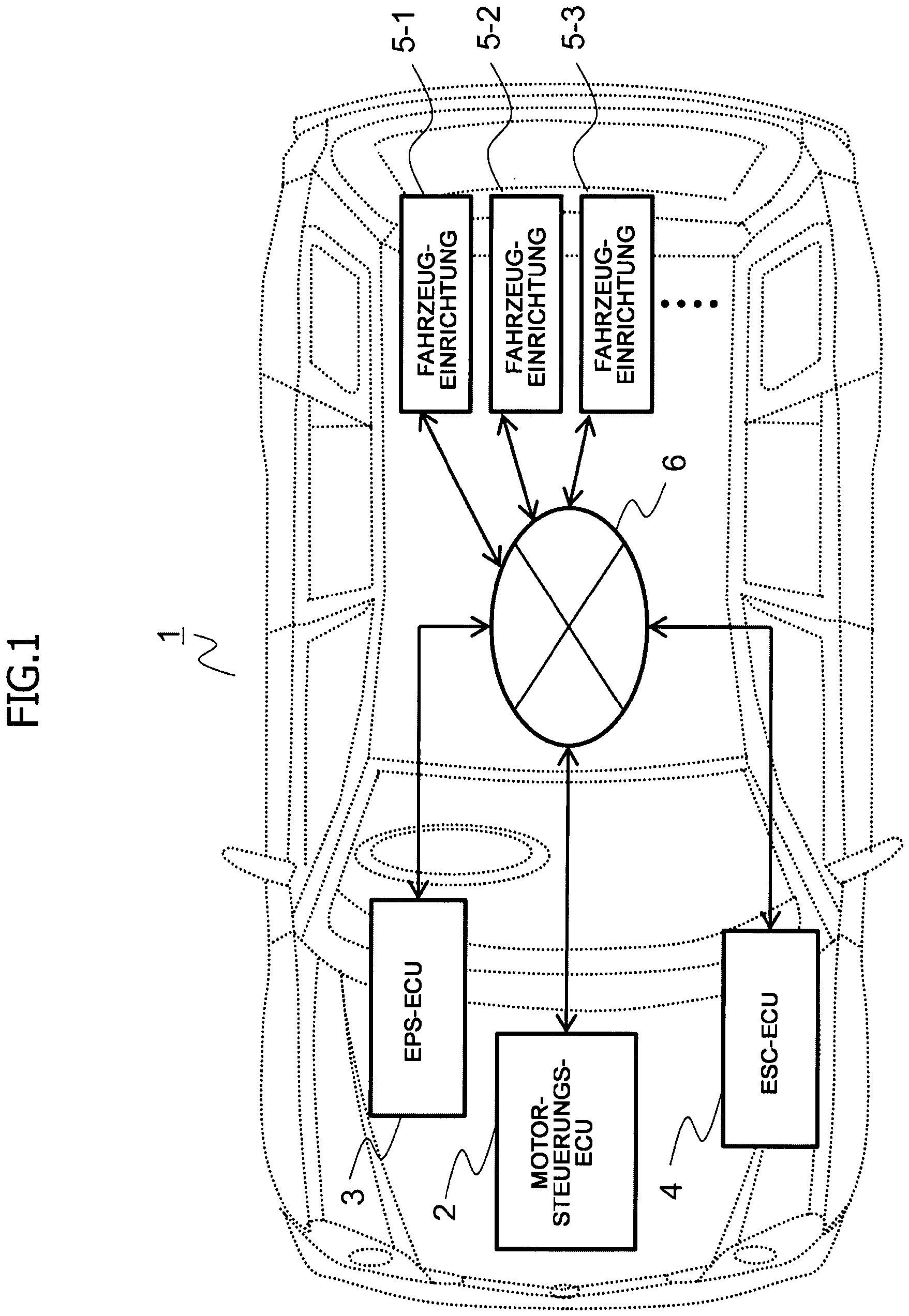
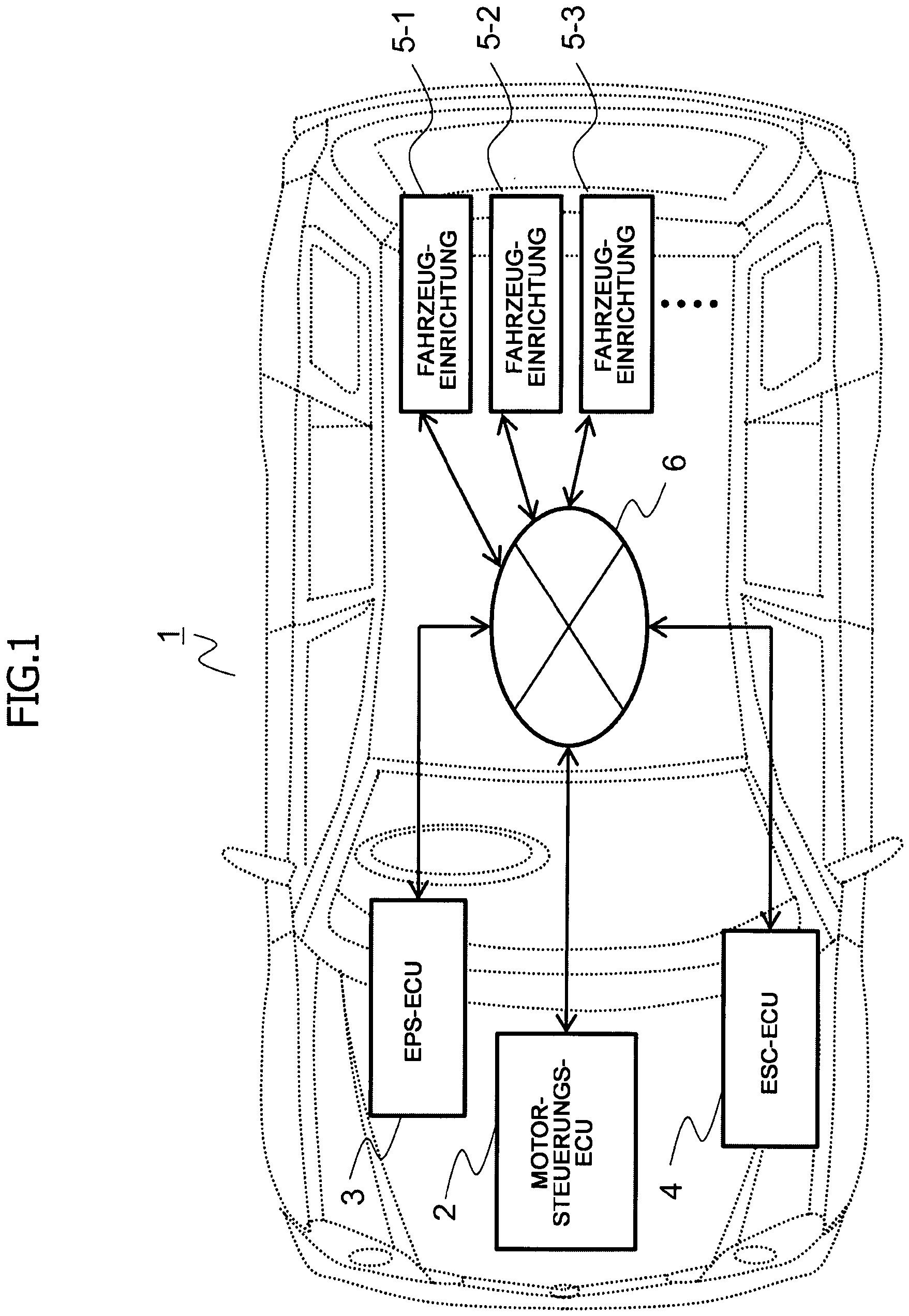
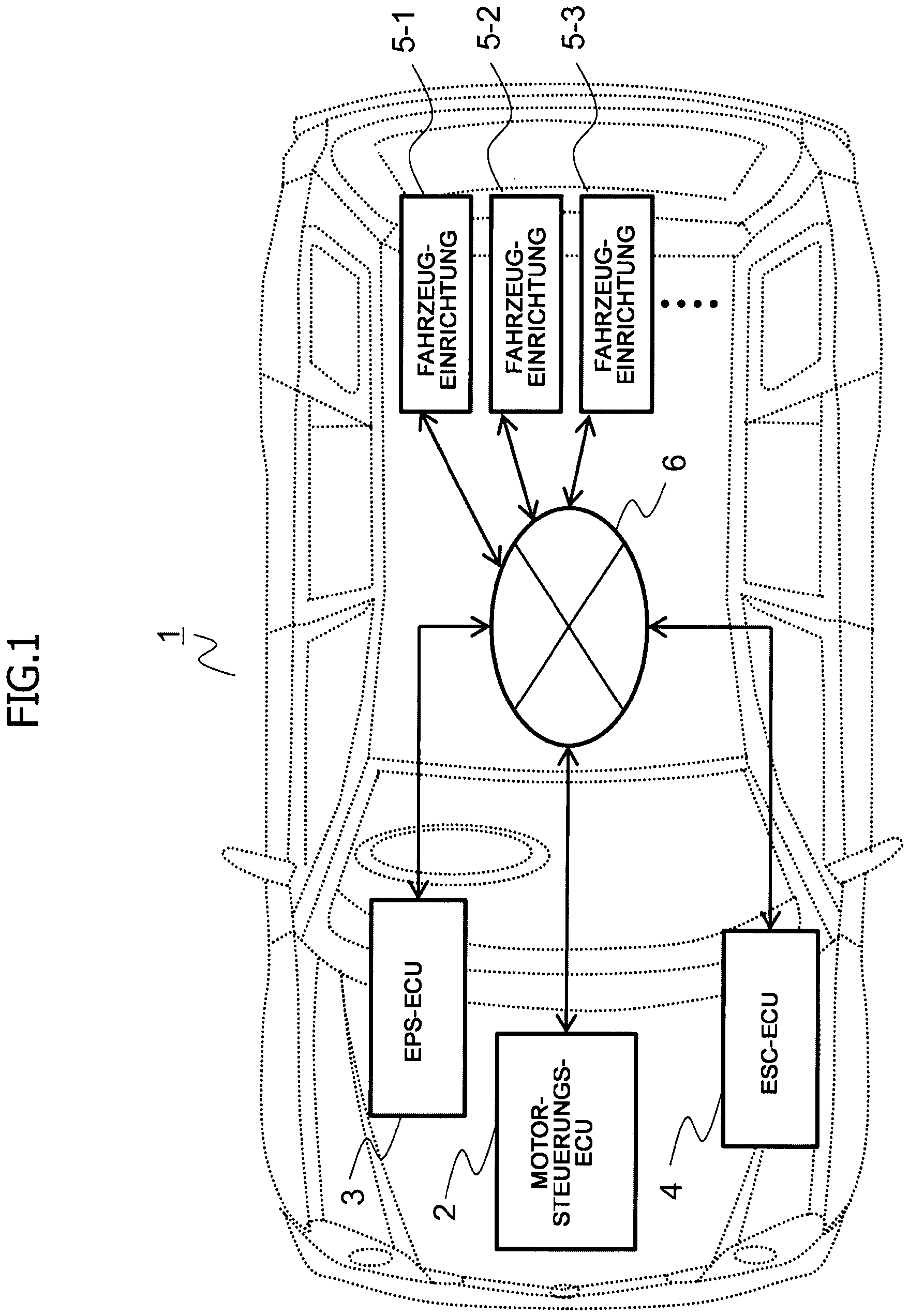
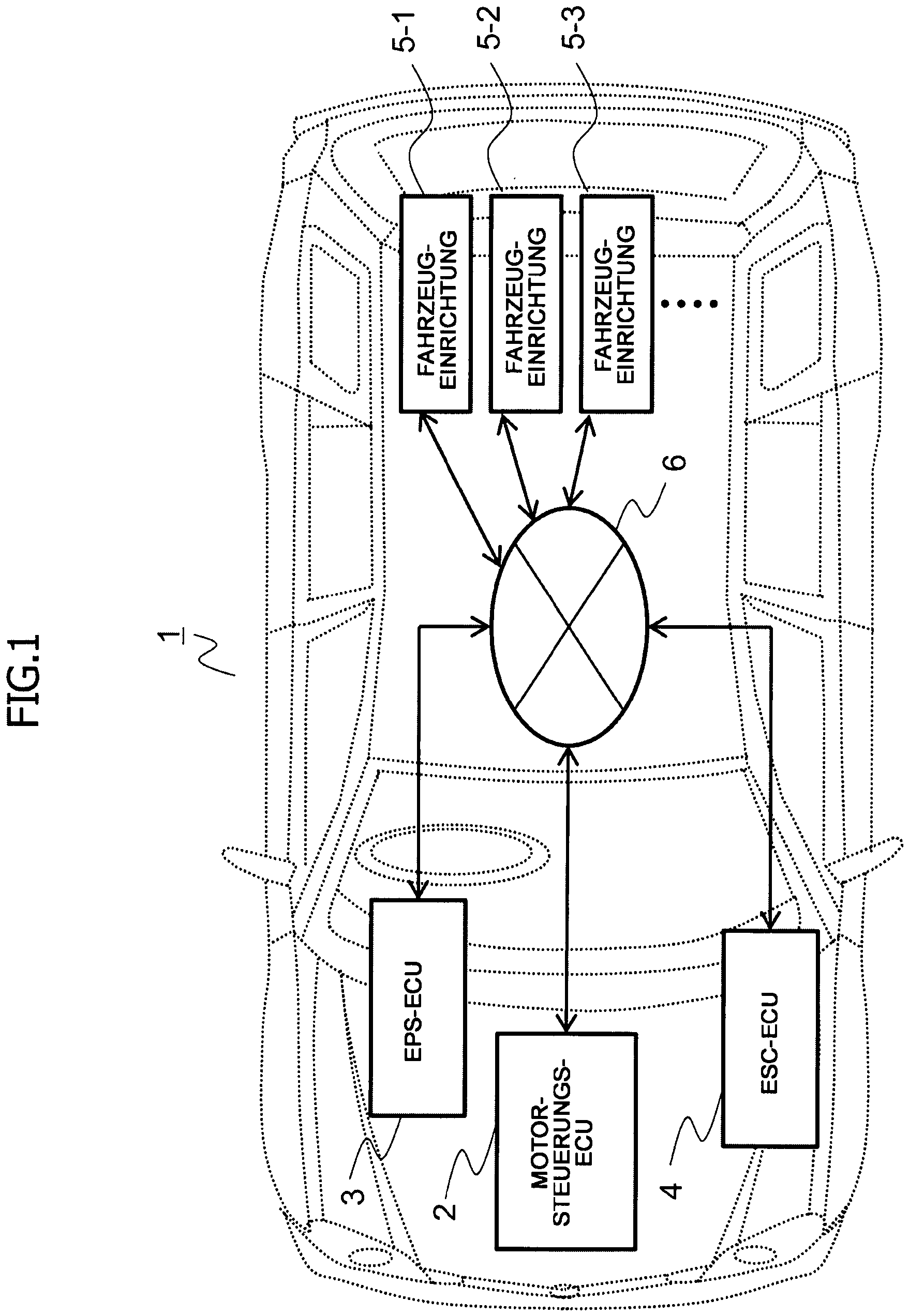
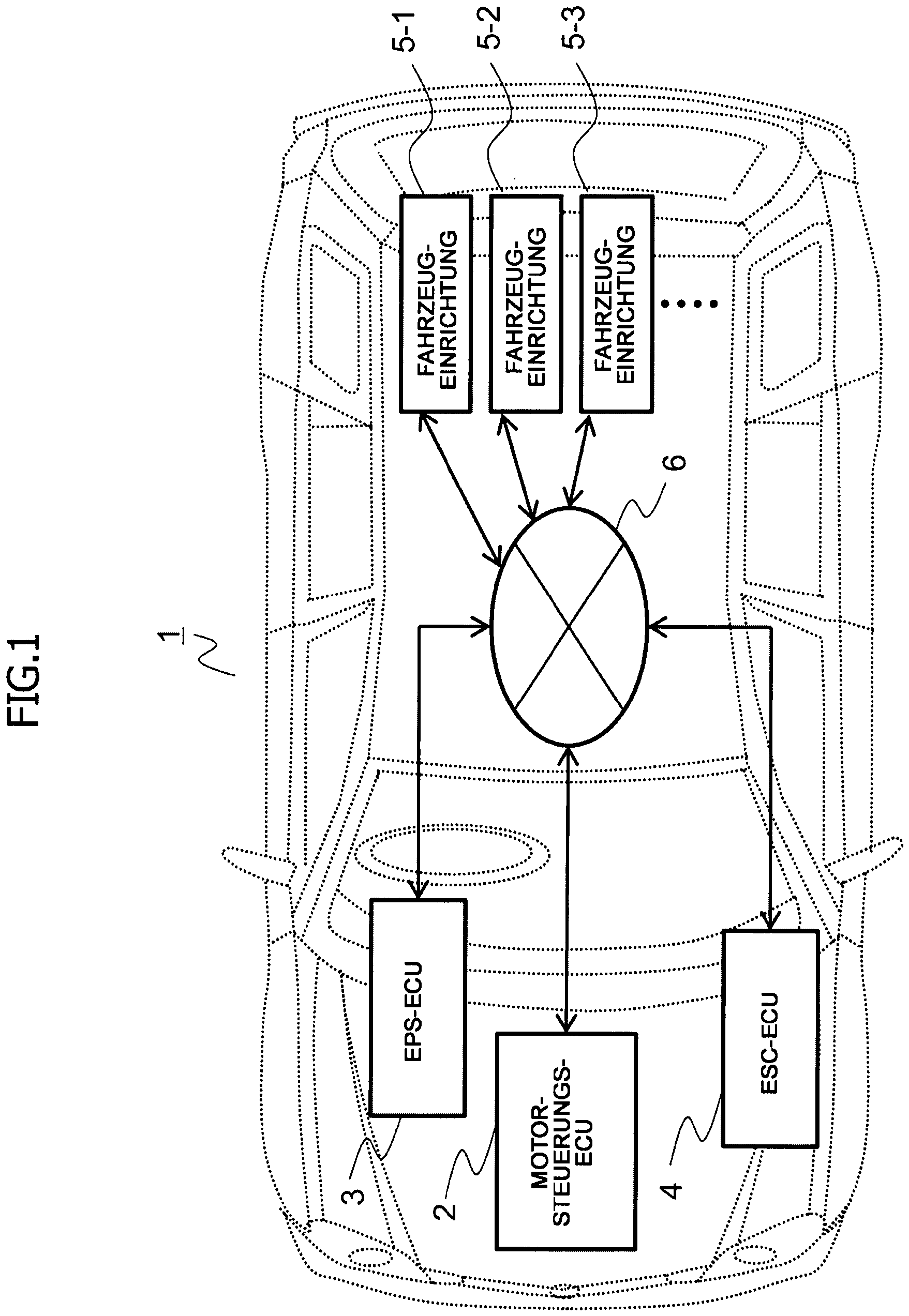
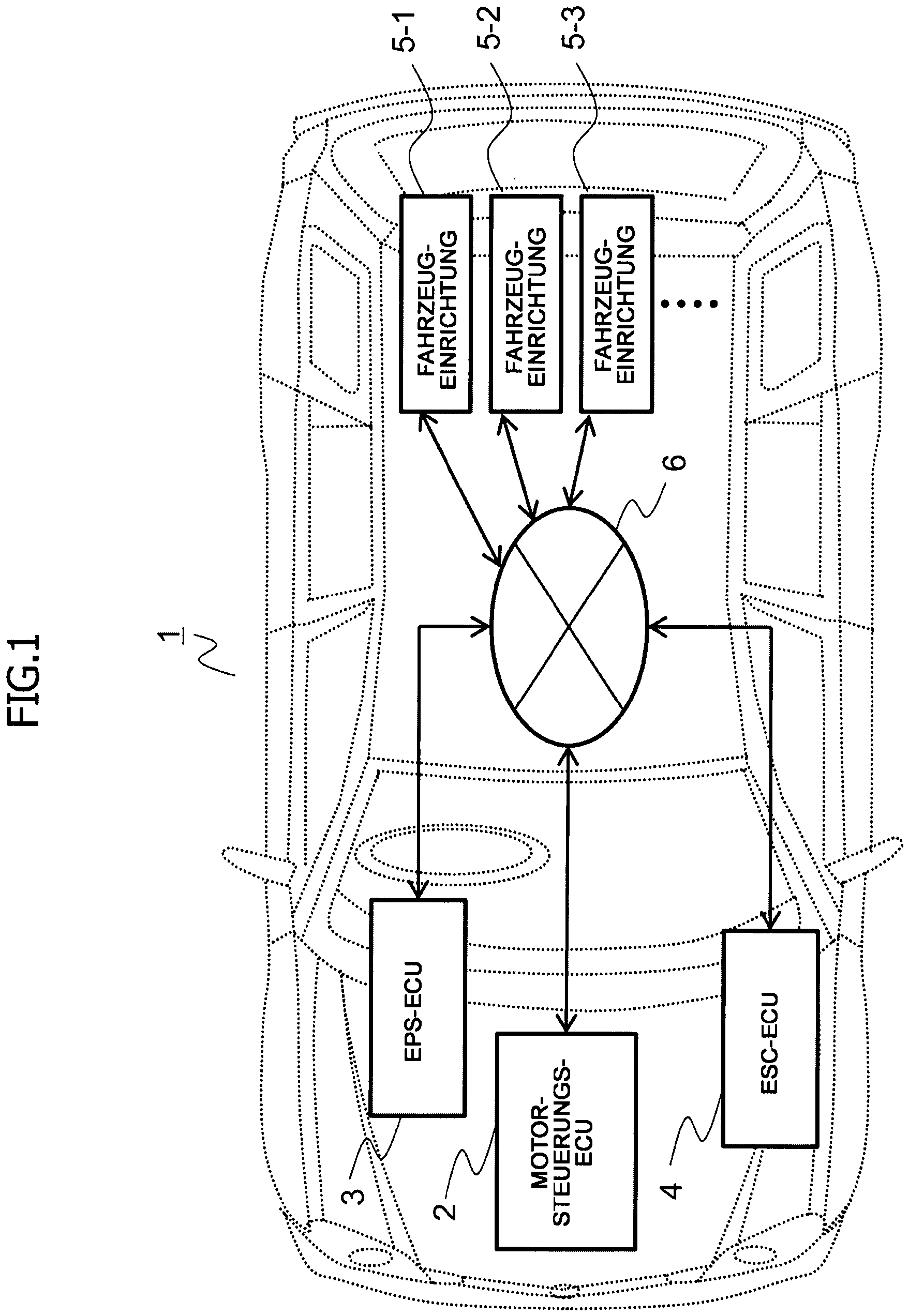
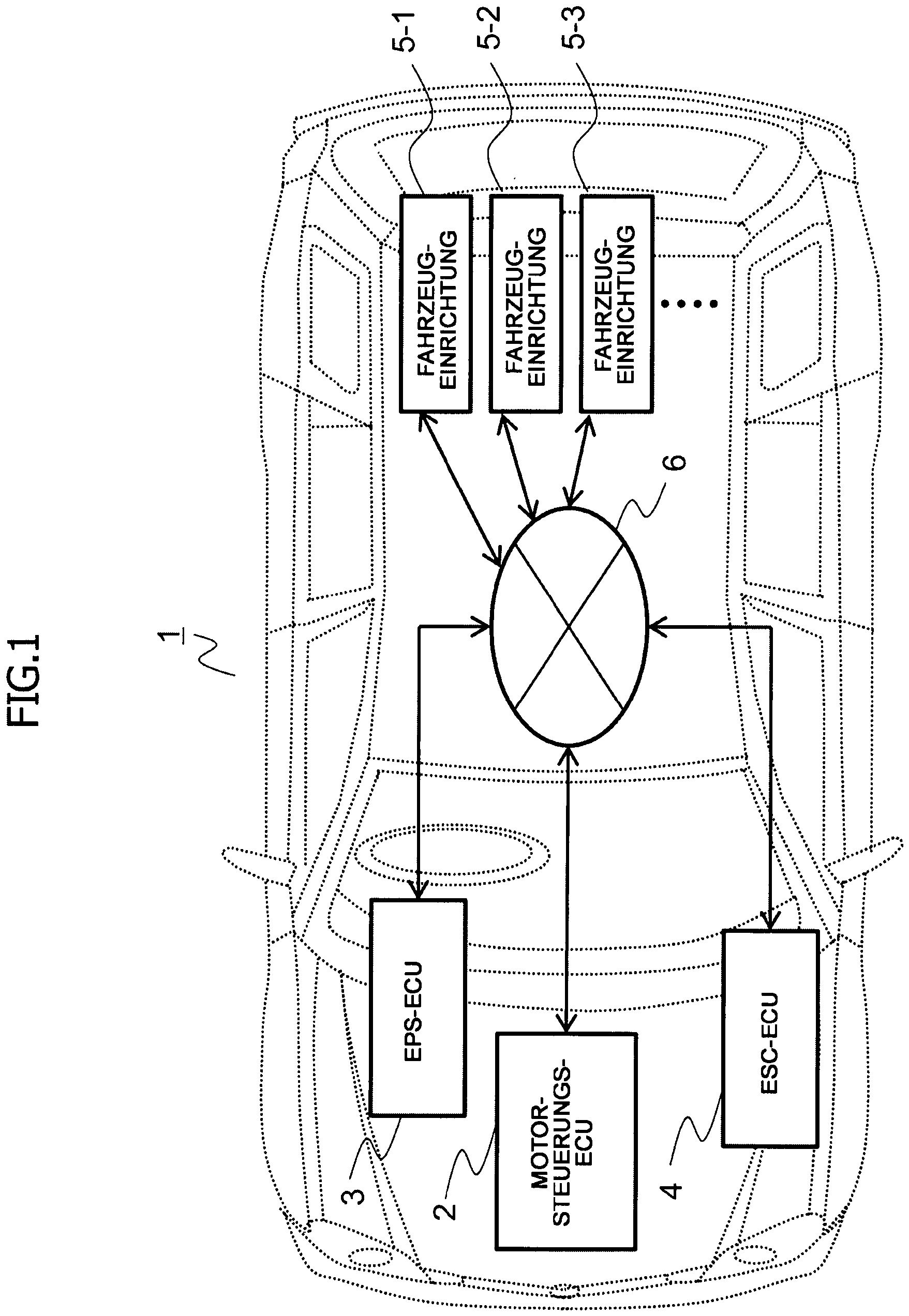
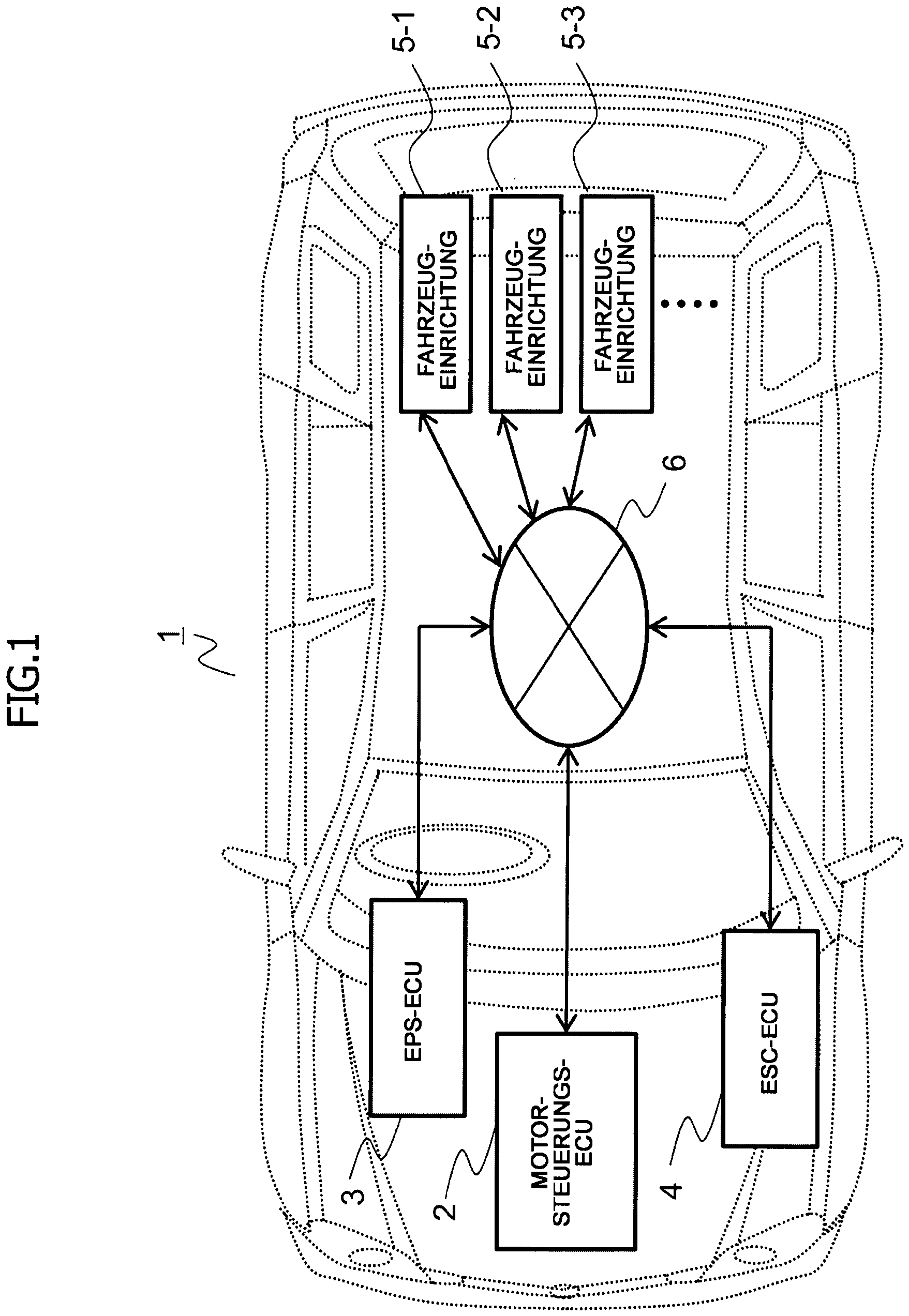
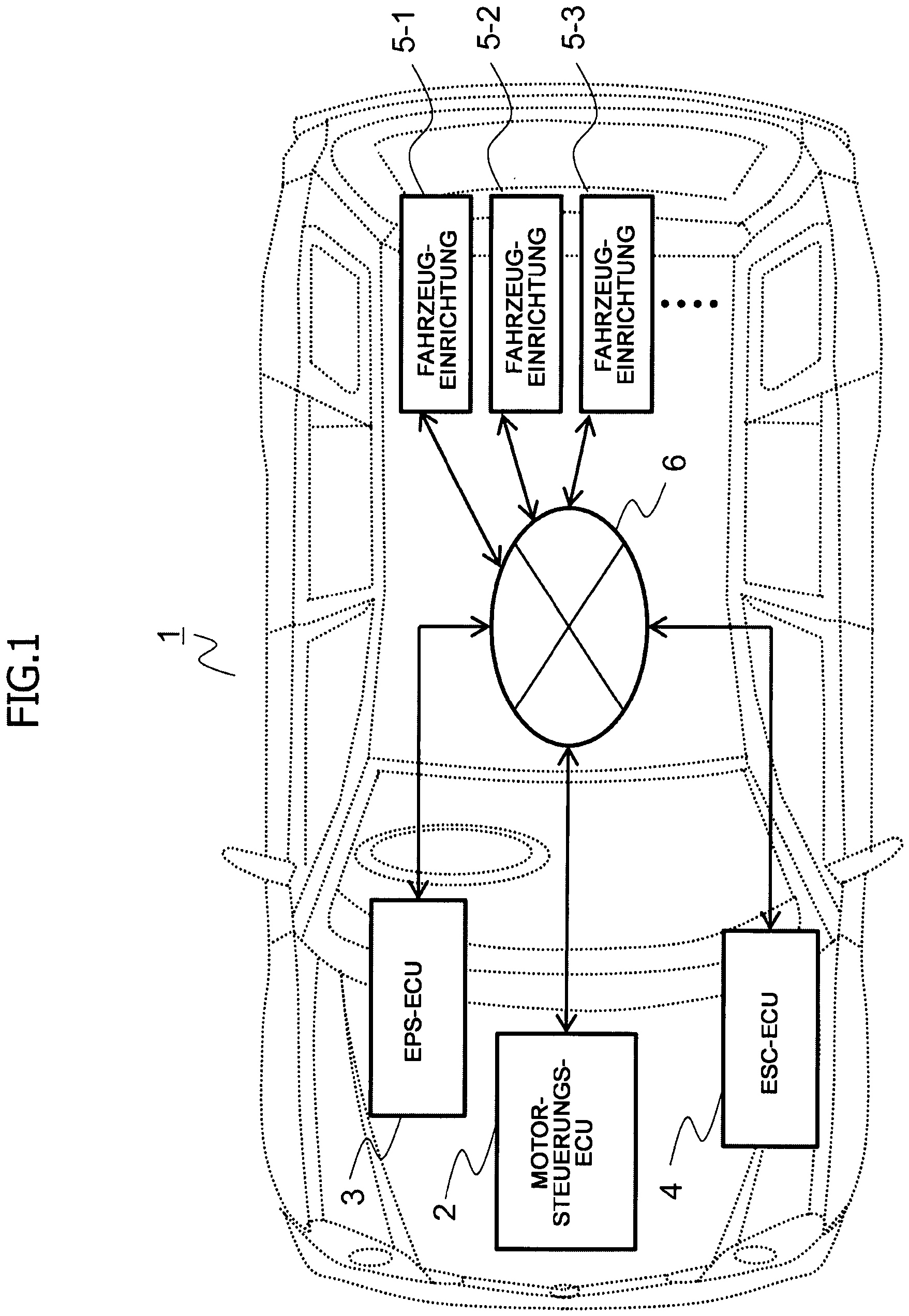
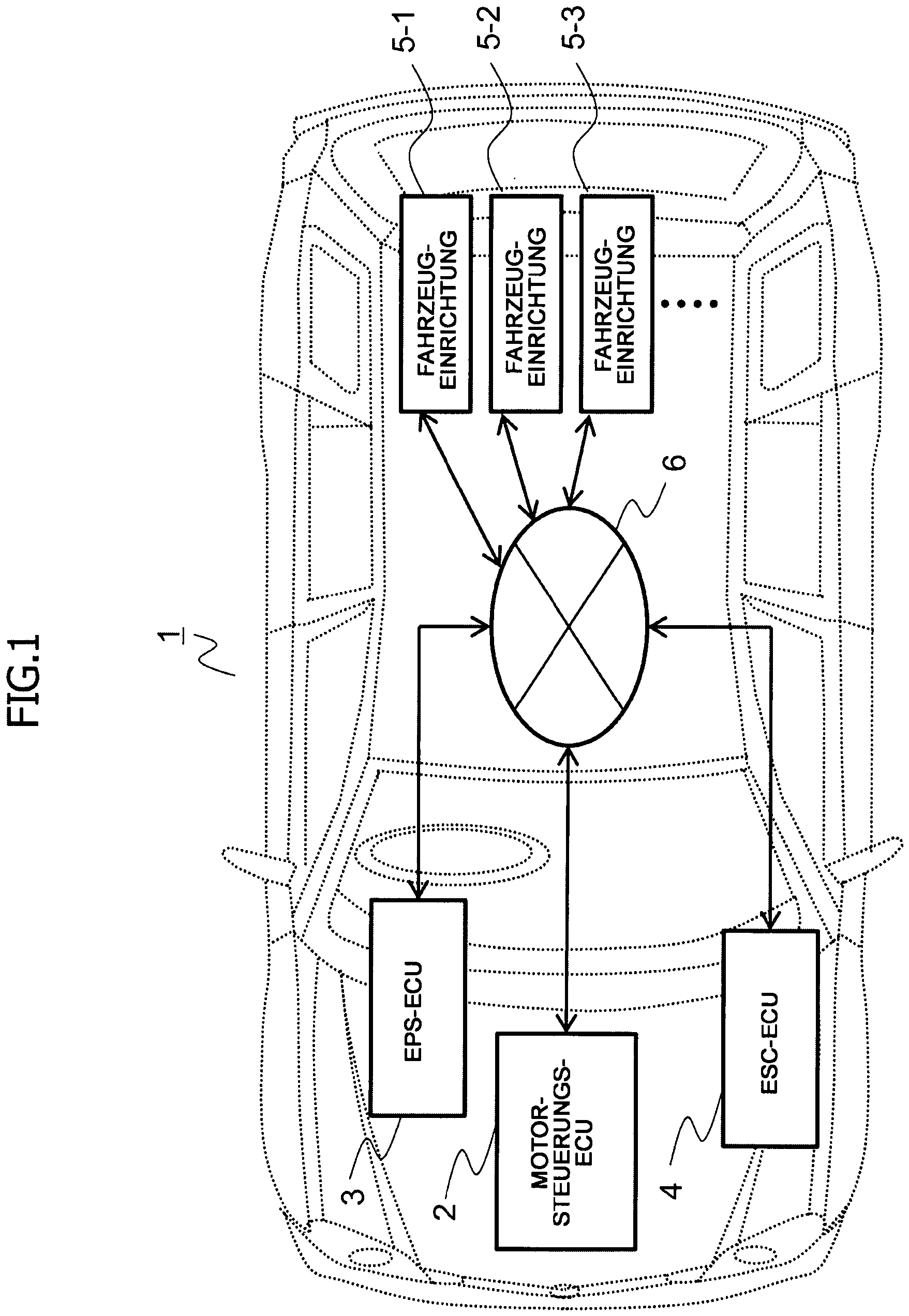
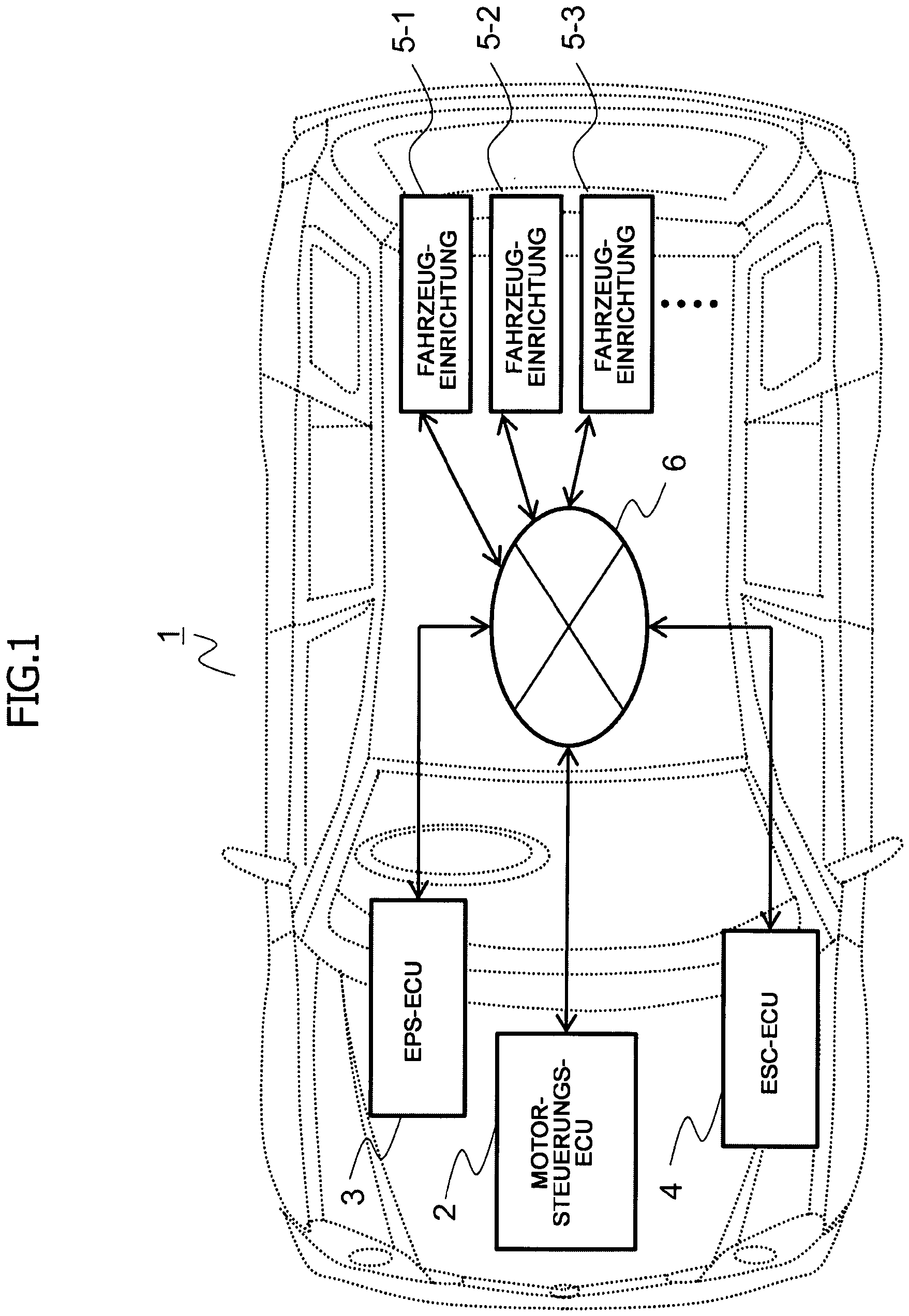
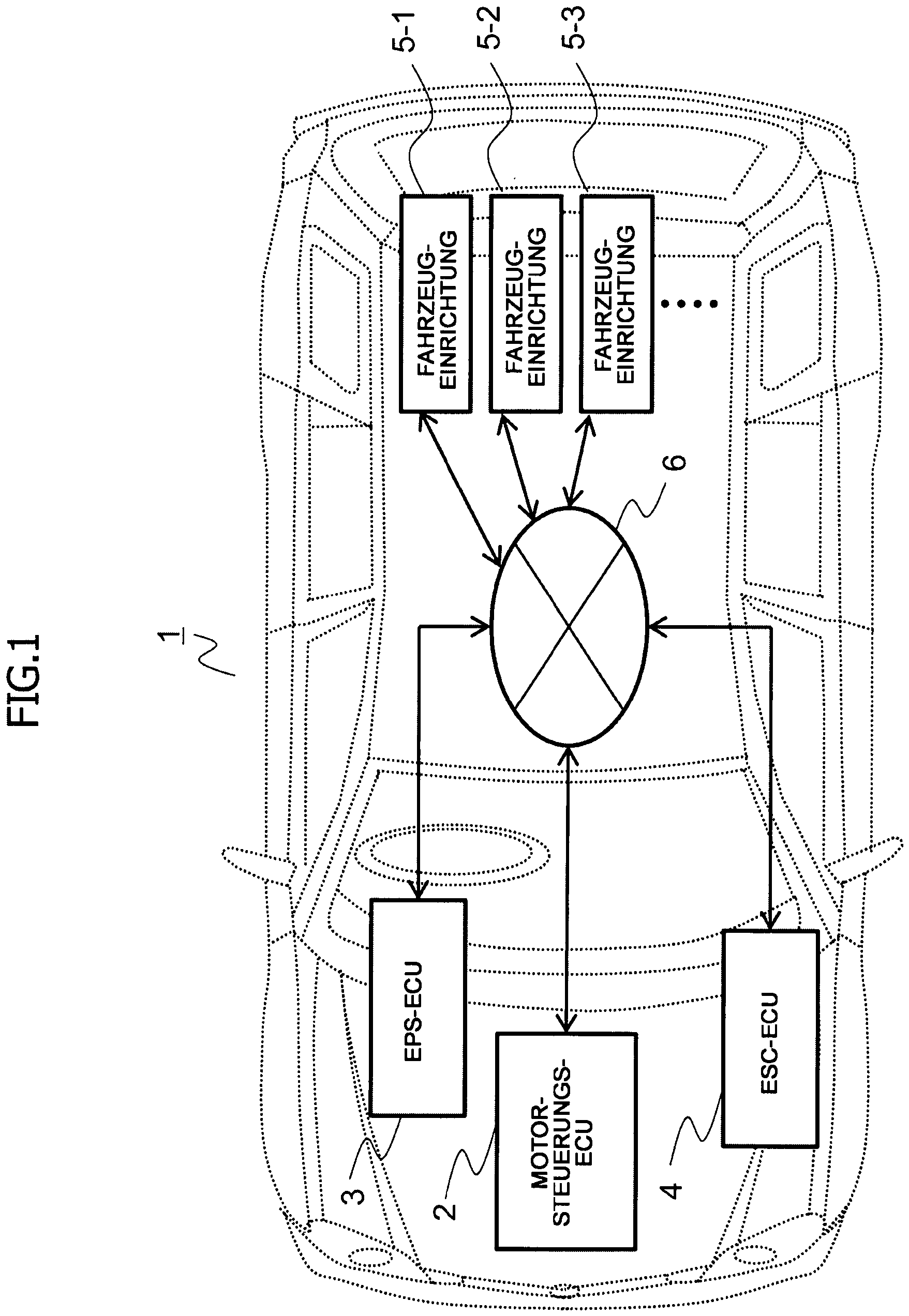
Die Erfindung betrifft eine Fahrzeugsteuervorrichtung mit einer Redundanz. Einige Fahrzeugsteuervorrichtungen weisen eine Redundanz oder eine redundante Konfiguration auf, um die Zuverlässigkeit zu erhöhen und die Fahrzeugsicherheit zu verbessern. Zum Beispiel gibt das Patentdokument 1 eine Motorsteuervorrichtung an, die mit zwei Stromwandlungsschaltungssystemen ausgestattet ist. Diese Motorsteuervorrichtung wird auf eine Servolenkvorrichtung angewendet. Wenn in der Servolenkvorrichtung zwei Systeme eine Temperaturdifferenz von nicht weniger als einem vorbestimmten Schwellwert aufweisen, stoppt die Motorsteuervorrichtung den Betrieb eines Wechselrichters in dem System, in dem eine höhere Temperatur erfasst wird, oder reduziert einen Grenzwert für den Strom. Patentdokument 1: Die Fahrzeugsteuervorrichtung mit einer redundanten Konfiguration kann die Fahrzeugsicherheit auch dann verbessern, wenn ein Ausfall oder ein anderes ähnliches Problem in einem System auftritt, kann das ausgefallene System stoppen und kann veranlassen, dass das andere normale System die Steuerung fortsetzt. Wenn jedoch ein normal betriebener Teil des ausgefallenen Systems, sofern vorhanden, nicht verwendet wird, wird dadurch eine Verschwendung von Hardwareressourcen verursacht. Die Erfindung nimmt auf die oben geschilderten Umstände Bezug, wobei es eine Aufgabe der Erfindung ist, eine Fahrzeugsteuervorrichtung vorzusehen, die einen normal betriebenen Teil eines ausgefallenen Systems in einer redundanten Konfiguration verwenden kann. Eine Fahrzeugsteuervorrichtung gemäß einem Aspekt der Erfindung enthält eine Anormalzustandsspezifische-Aufgabe-Ausführeinheit, die konfiguriert ist zum, wenn eine Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in einer Betätigungseinheit eines Host-systems oder in einem Ausgabesignal eines Sensors derselben aufgetreten ist, Veranlassen einer Steuervariablen-Berechnungseinheit, die Berechnung einer Steuervariable zu stoppen, und zum Veranlassen einer Betriebssteuereinheit, die Betriebssteuerung für eine Betätigungseinheit zu stoppen und dann eine andere Berechnung als die Berechnung der Steuervariable für die Betriebssteuerung der Betätigungseinheit auszuführen. Gemäß der Erfindung enthält die Fahrzeugsteuervorrichtung mit einer redundanten Konfiguration eine Anormalzustandsspezifische-Aufgabe-Ausführeinheit, sodass ein normal betriebener Teil eines ausgefallenen Systems wenigstens einen Teil der einem normalen System zugewiesenen Funktionen übernehmen kann. Im Folgenden werden Ausführungsformen der Erfindung mit Bezug auf die Zeichnungen beschrieben. Der Lenkmechanismus 18 umfasst eine Lenkwelle 19, eine Ritzelwelle und eine Zugstange. Die Lenkwelle 19 dreht sich gemeinsam mit einem Lenkrad. Lenkdrehmomentsensoren 21 und Lenkwinkelsensoren 22 sind an einer Lenkachse 20 als Lenksensoren angebracht, die dazu dienen, zu erfassen, wie der Lenkmechanismus 18 das Lenken steuert. Insbesondere sind ein Lenkdrehmomentsensorpaar 21 und ein Lenkwinkelsensorpaar 22 angebracht. Die Lenkdrehmomentsensoren 21 erfassen ein Lenkdrehmoment (Drehstangendrehmoment), das in dem Lenkmechanismus 18 basierend auf einer Drehgröße der Drehstange erzeugt wird. Die Lenkwinkelsensoren 22 erfassen einen Lenkwinkel während des Lenkens. Die Ritzelwelle ist mit der Lenkwelle 19 über die Drehstange verbunden. Die Staubmanschetten 16, 16 sind zum Beispiel aus Gummi ausgebildet und weisen eine kreisrunde Balgform auf. Äußere Enden der Staubmanschetten 16, 16 in einer Fahrzeugbreitenrichtung sind an inneren Enden der Zugstangen 17, 17 in der Fahrzeugbreitenrichtung fixiert. Die anderen Enden des Paars von Zugstangen 17, 17 sind mit beiden Enden der Zahnstange verbunden. Die Logikschaltungseinheit 3a und die Stromkreiseinheit 3b weisen eine redundante Konfiguration einschließlich einer Einheit EPP1 eines ersten Systems und einer Einheit EPP2 eines zweiten Systems auf, die jeweils auf gegenüberliegenden Seiten einer Strichlinie DL liegen. Die Logikschaltungseinheit 3a der Einheit EPP1 in dem ersten System enthält zum Beispiel einen Mikrocontroller (in diesem Beispiel eine Dual-Core-CPU) 32, einen Vortreiber 33, eine CPU-Überwachungseinrichtung 34 und einen Virtuelle-Motorposition-Detektor (Induktivitätsdetektor) 35. Die Stromsteuereinheit 3b der Einheit EPP1 in dem ersten System enthält einen Wechselrichter 40 und eine Dreifach-Shunt-Stromerfassungseinheit 42. Die Stromerfassungseinheit 42 wird als ein Motorphasen-Stromsensor und ein primärer Stromsensor verwendet. Entsprechend enthält die Logikschaltungseinheit 3a der Einheit EPP2 in dem zweiten System zum Beispiel einen Mikrocontroller (in diesem Beispiel eine Dual-Core-CPU) 36, einen Vortreiber 37, eine CPU-Überwachungseinrichtung 38 und einen Virtuelle-Motorposition-Detektor (Induktivitätsdetektor 39). Die Stromsteuereinheit 3b in dem zweiten System enthält einen Wechselrichter 41 und eine Dreifach-Shunt-Stromerfassungseinheit 43. Die Stromerfassungseinheit 43 wird als ein Motorphasenstromsensor und ein primärer Stromsensor verwendet. Ein erster Lenksensor 23a (Lenkdrehmomentsensor 21a und Lenkwinkelsensor 22a) der Einheit EPP1 empfängt eine Stromversorgungsspannung von einer internen Betriebsstromversorgung 45 der Logikschaltungseinheit 3a, wobei ein Erfassungsergebnis desselben zu den beiden Mikrocontrollern 32, 36 gesendet wird. Weiterhin empfängt ein zweiter Lenksensor 23b (der Lenkdrehmomentsensor 21b und der Lenkwinkelsensor 22b) der Einheit EPP2 eine Stromversorgungsspannung von einer internen Betriebsstromversorgung 47 der Logikschaltungseinheit 3a, wobei ein Erfassungsergebnis desselben zu den beiden Mikrocontrollern 36, 32 gesendet wird. Dabei können der Lenkdrehmomentsensor 21a und der Lenkwinkelsensor 22a sowie der Lenkdrehmomentsensor 21b und der Lenkwinkelsensor 22bjeweils duale Sensoren sein, die für eine entsprechende Dual-Core-CPU vorgesehen sind. Die Mikrocontroller 32, 36 empfangen eine Stromversorgungsspannung von internen Betriebsstromversorgungen 48, 49. Die Mikrocontroller 32, 36 senden und empfangen ein Statussignal und ein Sensorsignal zu- und voneinander über eine Kommunikation zwischen Mikrocomputern, was nachfolgend als „Mikrocomputer-Interkommunikation“ (CPU-Interkommunikation) bezeichnet wird. Der Elektromotor 13 enthält Motordrehwinkelsensoren (duale Motorpositionssensoren) 50a, 50b. Motordrehwinkelsensoren 50a, 50b empfangen eine Stromversorgungsspannung von internen Betriebsstromversorgungen 51, 52, die in der Logikschaltungseinheit 3a vorgesehen sind, wobei Erfassungsergebnisse derselben zu den Mikrocontrollern 32, 36 übertragen werden. Der Mikrocontroller 32 erzeugt ein Pulssignal für das Ausführen einer Pulsbreitenmodulation (PWM)-Steuerung basierend zum Beispiel auf dreiphasigen Strömen, die durch eine Stromerfassungseinheit 42 erfasst werden, einer Drehposition eines Rotors, die durch den Virtuelle-Motorposition-Detektor 35 erfasst wird, und einem Motordrehwinkel, der durch Motordrehwinkelsensoren 50a, 50b erfasst wird. Das aus dem Mikrocontroller 32 ausgegebene Pulssignal wird zu einem Vortreiber 33 übertragen. Weiterhin erzeugt der Mikrocontroller 36 ein Pulssignal für die Ausführung einer PWM-Steuerung basierend auf zum Beispiel den Phasenströmen, die durch die Stromerfassungseinheit 43 erfasst werden, der Drehposition des Rotors, die durch den Virtuelle-Motorposition-Detektor 39 erfasst wird, und dem Motordrehwinkel, der durch die Motordrehwinkelsensoren 50a, 50b erfasst wird. Das von dem Mikrocontroller 36 ausgegebene Pulssignal wird zu dem Vortreiber 37 gesendet. Der Betrieb des Mikrocontrollers 33 wird durch die CPU-Überwachungseinheit 34 geprüft, und der Betrieb des Mikrocontrollers 36 wird durch die CPU-Überwachungseinheit 38 geprüft. Die CPU-Überwachungseinrichtungen 34, 38 sind zum Beispiel Timer (auch als „Watch-Dog“ bezeichnet) und dienen dazu, kontinuierlich zu überwachen, ob die Mikrocontroller 32, 36 normal betrieben werden. Das von dem Vortreiber 33 ausgegebene Pulssignal (PWM-Signal) wird zu dem Wechselrichter 40 gesendet, und das von dem Vortreiber 37 ausgegebene Pulssignal (PWM-Signal) wird zu dem Wechselrichter 41 gesendet. Die Wechselrichter 40, 41 betreiben den Elektromotor 13, der Spulensätze 13a, 13b der zwei Systeme aufweist. Stromerfassungseinheiten 42, 43 erfassen jeweils dreiphasige Ströme, die während des Betriebs des Elektromotors 13 erzeugt werden, und senden Erfassungssignale zu den Mikrocontrollern 32, 36 jeweils für eine Regelung Dann berechnen die Mikrocontroller 32, 36 die Gesamtmenge des von der Batterie 31 zugeführten Stroms basierend auf dem dreiphasigen Strom. Weiterhin erfassen Virtuelle-Motorposition-Detektoren 35, 29 jeweils eine Drehposition des Rotors basierend auf einer Spannung an einem neutralen Punkt einer Statorspule und senden Erfassungssignale jeweils an die Mikrocontroller 32, 36. Die Erfassungssignale von Virtuelle-Motorposition-Detektoren 35, 39 werden verwendet, um aus Stromerfassungseinheiten 42, 43 und Motordrehwinkelsensoren 50a, 50b ausgegebene Erfassungsergebnisse zu prüfen, und werden als ein Backup für einen ausgefallenen Sensor verwendet. Der Sensor 54 dient dazu, eine Zustandsvariable zu erfassen, die einen Betriebszustand eines Fahrzeugs angibt, und enthält einen Lenkdrehmomentsensor 21 (21a, 21b), einen Lenkwinkelsensor 22 (22a, 22b), einen Motordrehwinkelsensor 50 (50a, 50b) und einen Motorphasenstromsensor/primären Stromsensor (erste Stromerfassungseinheit 42) wie oben beschrieben sowie eine Stromversorgungs-Spannungsüberwachungseinrichtung 81 und einen Temperatursensor 82. Entsprechend dient der Sensor 55 dazu, eine Zustandsvariable zu erfassen, die einen Betriebszustand des Fahrzeugs angibt, und enthält einen Lenkdrehmomentsensor 21 (21a, 21b), einen Lenkwinkelsensor 22 (22a, 22b), einen Motordrehwinkelsensor 50 (50a, 50b) und einen Motorphasenstromsensor/primären Stromsensor (zweite Stromerfassungseinheit) 43 wie oben beschrieben sowie eine Stromversorgungs-Spannungsüberwachungseinrichtung 83. Der Mikrocontroller 32 steuert den Spulensatz 13a des Elektromotors 13 als eine erste Betätigungseinheit basierend auf einem Ausgabesignal des Sensors 54. Der Mikrocontroller 32 enthält zum Beispiel eine Eingabesignal-Verarbeitungseinheit 61, eine CAN-Kommunikationseinheit 62, eine Hilfssteuerung/Externbefehl-Steuereinheit 63, eine Hilfsbegrenzungseinheit 64, eine Motorsteuereinheit 65, eine Diagnosefunktionseinheit 66, eine Aufgabenwechselfunktionseinheit 67 und eine Mikrocomputer-Interkommunikationseinheit 68. Entsprechend steuert der Mikrocontroller 36 den Spulensatz 13b des Elektromotors 13 als eine zweite Betätigungseinheit basierend auf einem Ausgabesignal des Sensors 55. Der Mikrocontroller 36 enthält zum Beispiel eine Eingabesignal-Verarbeitungseinheit 71, eine CAN-Kommunikationseinheit 72, eine Hilfssteuerung/Externbefehl-Steuereinheit 73, eine Hilfsbegrenzungseinheit 74, eine Motorsteuereinheit 75, eine Diagnosefunktionseinheit 76, eine Aufgabenwechselfunktionseinheit 77 und eine Mikrocomputer-Interkommunikationseinheit 78. Die CAN-Kommunikationseinheiten 62, 72 sind mit den anderen ECUs oder Fahrzeugeinrichtungen 5-1, 5-2, 5-3 ... über einen CAN-Bus 53 (Kommunikationsnetz 6) wie in Ein Ausgabesignal jedes Sensors in dem Sensor 54 wird in die Eingabesignal-Verarbeitungseinheit (erste Sensorsignaleingabeeinheit) 61 eingegeben und zum Beispiel durch eine A/D-Wandlung zu einem digitalen Signal gewandelt. Ein Ausgabesignal der Eingabesignal-Verarbeitungseinheit 61 wird zu der Hilfssteuerung/Externbefehl-Steuereinheit (ersten Steuervariablen-Berechnungseinheit) 63 gesendet. Die Hilfssteuerung/Externbefehl-Steuereinheit 63 berechnet eine erste Steuervariable für das Steuern des Betriebs des Elektromotors 13 basierend auf dem Ausgabesignal des Sensors 54. Die erste Steuervariable enthält den Grad der Unterstützung für die Lenkkraft eines Fahrers und die Größe der Lenkkraft, die in Reaktion auf einen externen Befehl unabhängig von der Lenkbetätigung des Fahrers zum Beispiel in einem automatischen Einparksystem ausgeübt wird. Ein von der Hilfssteuerung/Externbefehl-Steuereinheit 63 ausgegebenes Signal wird zu der Motorsteuereinheit (ersten Betriebssteuereinheit) 65 über die Hilfsbegrenzungseinheit 64 gesendet. Die Motorsteuereinheit 65 steuert den Betrieb des Elektromotors 13 über den Vortreiber 33 und den Wechselrichter 40 basierend auf der ersten Steuervariable. Die Diagnosefunktionseinheit (erste Anormalitätsbestimmungseinheit) 66 empfängt die Ausgabesignale der Eingabesignal-Verarbeitungseinheit 61 und der CAN-Kommunikationseinheit 62, um dadurch das Vorhandensein/die Abwesenheit einer Anormalität in dem Vortreiber 33, dem Wechselrichter 40, dem Spulensatz 13a oder einem Ausgabesignal des Sensors 54 zu bestimmen. Ein Ausgabesignal der Diagnosefunktionseinheit 66 wird zu der Hilfsbegrenzungseinheit 64 und der Aufgabenwechselfunktionseinheit (Anormalzustandsspezifische-Aufgabe-Ausführeinheit) 67 gesendet, um dadurch die Unterstützung für eine Lenkkraft durch den Elektromotor 13 zu begrenzen und auch Aufgaben der einzelnen Einheiten zu wechseln. Die Aufgabenwechselfunktionseinheit 67 überwacht ein Anormalität-Bestätigungsflag der Diagnosefunktionseinheit 66 und wechselt Aufgaben zum Beispiel durch das Wechseln eines auszuführenden Programms, wenn das Anormalität-Bestätigungsflag gesetzt ist. Wenn die Diagnosefunktionseinheit 66 bestimmt, dass eine Anormalität in dem Vortreiber 33, dem Wechselrichter 40, dem Spulensatz 13a oder dem Ausgabesignal des Sensors 54 aufgetreten ist, veranlasst die Aufgabenwechselfunktionseinheit 67 die Hilfssteuerung/Externbefehl-Steuereinheit 63, das Berechnen der ersten Steuervariable zu stoppen, und veranlasst die Motorsteuereinheit 65, die über den Vortreiber 33 und den Wechselrichter 40 ausgeführte Betriebssteuerung für den Elektromotor 13 zu stoppen. Dann veranlasst die Aufgabenwechselfunktionseinheit 67 die Hilfssteuerung/Externbefehl-Steuereinheit 63, eine andere Berechnung als die Berechnung der ersten Steuervariable für die Betriebssteuerung des Elektromotors 13 auszuführen. Weiterhin wird ein Ausgabesignal jedes Sensors in dem Sensor 55 in eine Eingabesignal-Verarbeitungseinheit (die zweite Sensorsignal-Eingabeeinheit) 71 eingegeben und zum Beispiel durch eine A/D-Wandlung zu einem digitalen Signal gewandelt. Ein Ausgabesignal der Eingabesignal-Verarbeitungseinheit 71 wird zu der Hilfssteuerung/Externbefehl-Steuereinheit (der zweiten Steuervariablen-Berechnungseinheit) 73 gesendet. Die Hilfssteuerung/Externbefehl-Steuereinheit 73 berechnet eine zweite Steuervariable für das Steuern des Betriebs der zweiten Betätigungseinheit des Elektromotors basierend auf dem Ausgabesignal des Sensors 55. Die zweite Steuervariable enthält den Grad der Unterstützung für die Lenkkraft eines Fahrers und die Größe der Lenkkraft, die in Reaktion auf einen externen Befehl unabhängig von der Lenkbetätigung des Fahrers zum Beispiel in einem automatischen Einparksystem ausgeübt wird. Ein von der Hilfssteuerung/Externbefehl-Steuereinheit 73 ausgegebenes Signal wird zu einer Motorsteuereinheit (zweiten Betriebssteuereinheit) 75 über die Hilfsbegrenzungseinheit 74 gesendet. Die Motorsteuereinheit 75 steuert den Betrieb des Elektromotors 13 über einen Vortreiber 37 und einen Wechselrichter 41 basierend auf der zweiten Steuervariable. Die Diagnosefunktionseinheit (zweite Anormalitätsbestimmungseinheit 76) empfängt die Ausgabesignale der Eingabesignal-Verarbeitungseinheit 71 und der CAN-Kommunikationseinheit 72, um das Vorhandensein/die Abwesenheit einer Anormalität in dem Vortreiber 37, dem Wechselrichter 41, dem Spulensatz 13b oder einem Ausgabesignal des Sensors 55 zu bestimmen. Ein Ausgabesignal der Diagnosefunktionseinheit 76 wird zu der Hilfsbegrenzungseinheit 74 und der Aufgabenwechselfunktionseinheit (der Anormalzustandsspezifische-Aufgabe-Ausführeinheit) 77 gesendet, um dadurch die Unterstützung für eine Lenkkraft durch den Elektromotor 13 zu begrenzen und auch Aufgaben der einzelnen Einheiten zu wechseln. Die Aufgabenwechselfunktionseinheit 77 überwacht ein Anormalität-Bestätigungsflag der Diagnosefunktionseinheit 76 und wechselt Aufgaben durch das Wechseln eines auszuführenden Programms, wenn das Anormalität-Bestätigungsflag gesetzt ist. Wenn die Diagnosefunktionseinheit 76 bestimmt, dass eine Anormalität in dem Vortreiber 37, dem Wechselrichter 41, dem Spulensatz 13b oder einem Ausgabesignal des Sensors 55 aufgetreten ist, veranlasst die Aufgabenwechselfunktionseinheit 77 die Hilfssteuerung/Externbefehl-Steuereinheit 73, das Berechnen der zweiten Steuervariable zu stoppen, und veranlasst die Motorsteuereinheit 75, die über den Vortreiber 37 und den Wechselrichter 41 ausgeführte Betriebssteuerung für den Elektromotor 13 zu stoppen. Dann veranlasst die Aufgabenwechselfunktionseinheit 77 die Hilfssteuerung/Externbefehl-Steuereinheit 73 eine andere Berechnung als die Berechnung der zweiten Steuervariable für die Betriebssteuerung des Elektromotors 13 auszuführen. Die Mikrocomputer-Interkommunikationseinheiten (CPU-Interkommunikationseinheiten) 68, 78 erlauben, dass der Mikrocontroller 32 und der Mikrocontroller 36 Signale zu- und voneinander senden und empfangen. Die Mikrocomputer-Interkommunikationseinheit 68 tauscht Daten mit der Diagnosefunktionseinheit 66 und der Aufgabenwechselfunktionseinheit 67 aus und kommuniziert auch mit den anderen ECUs oder Fahrzeugeinrichtungen über die CAN-Kommunikationseinheit 62 und den CAN-Bus 53. Weiterhin tauscht die Mikrocomputer-Interkommunikationseinheit 78 Daten mit der Diagnosefunktionseinheit 76 und der Aufgabenwechselfunktionseinheit 77 aus und kommuniziert auch mit den anderen ECUs oder Fahrzeugeinrichtungen über die CAN-Kommunikationseinheit 72 und den CAN-Bus 53. Die Aufgabenwechselfunktionseinheit 67 empfängt einen Aufgabenwechselbefehl von dem Mikrocontroller 36 über die Mikrocomputer-Interkommunikationseinheiten 78, 68 und sendet Informationen zu dem Abschluss des Aufgabenübergangs zu dem Mikrocontroller 36 über die Mikrocomputer-Interkommunikationseinheiten 68, 78. Weiterhin empfängt die Aufgabenwechselfunktionseinheit 77 einen Aufgabenwechselbefehl von dem Mikrocontroller 32 über die Mikrocomputer-Interkommunikationseinheiten 68, 78 und sendet Informationen zu dem Abschluss des Aufgabenübergangs zu dem Mikrocontroller 32 über die Mikrocomputer-Interkommunikationseinheiten 78, 68. Wenn weiterhin eine Anormalität in dem Vortreiber 33, dem Wechselrichter 40, dem Spulensatz 13a oder dem Sensor 54 aufgetreten ist, gibt die Aufgabenwechselfunktionseinheit 67 einen Berechnungsstoppbefehl zu der Hilfssteuerung/Externbefehl-Steuereinheit 63, der Hilfsbegrenzungseinheit 64 und der Motorsteuereinheit 65 aus, um die Berechnung zu stoppen. Wenn entsprechend eine Anormalität in dem Vortreiber 37, dem Wechselrichter 41, dem Spulensatz 13b oder dem Sensor 55 aufgetreten ist, gibt die Aufgabenwechselfunktionseinheit 77 einen Berechnungsstoppbefehl zu der Hilfssteuerung/Externbefehl-Steuereinheit 73, der Hilfsbegrenzungseinheit 74 und der Motorsteuereinheit 75 aus, um die Berechnung zu stoppen. Dann empfängt die Aufgabenwechselfunktionseinheit 67 einen an den Mikrocontroller 32 der Einheit EPP1 gerichteten Aufgabenstoppbefehl von dem Mikrocontroller 36 der Einheit EPP2 (Schritt S5). Der Mikrocontroller 32 der Einheit EPP1, der den Aufgabenstoppbefehl empfängt, führt eine vorbestimmte Aufgabenstoppverarbeitung durch (Schritt S6). Anschließend sendet der Mikrocontroller 32 der Einheit EPP1 Informationen zu dem Abschluss des Aufgabenübergangs an den Mikrocontroller 36 der Einheit EPP2 und wird die Verarbeitung beendet (Schritt S7). Wenn dagegen in Schritt S1 bestimmt wird, dass der Wert des Anormalitätszählers der vorbestimmte Wert oder größer ist, wird bestimmt, ob die Einheit EPP1 nicht in der Lage ist, kontinuierlich ein Hilfsdrehmoment auszugeben (Schritt S8). Wenn NEIN, wird der Betriebsmodus zu einem sicheren Modus, wenn die Einheit EPP1 mit dem Ausgeben eines Hilfsdrehmoments fortfährt, versetzt und wird die Verarbeitung beendet (Schritt S9). Wenn JA, zum Beispiel weil ein Ausfall in dem Sensor 54, einem internen Speicher des Mikrocontrollers 32, dem Vortreiber 33, dem Wechselrichter 40 oder dem Spulensatz 13a gegeben ist, dann wird der Betriebsmodus zu einem sicheren Modus, wenn die Einheit EPP1 das Ausgeben eines Hilfsdrehmoments stoppt, versetzt (Schritt S10). Anschließend führt die Aufgabenwechselfunktionseinheit 67 eine Aufgabenwechselverarbeitung durch (Schritt S11). In dem folgenden Schritt S12 sendet der Mikrocontroller 32 der Einheit EPP1 einen Aufgabenstoppbefehl zu dem Mikrocontroller 36 der Einheit EPP2. In dem folgenden Schritt S13 empfängt der Mikrocontroller 32 der Einheit EPP1 Informationen zu dem Abschluss des Aufgabenübergangs von dem Mikrocontroller 36 der Einheit EPP2 und wird die Verarbeitung beendet. Dann empfängt die Aufgabenwechselfunktionseinheit 77 einen von dem Mikrocontroller 32 der Einheit EPP1 zu dem Mikrocontroller 36 der Einheit EPP2 gerichteten Aufgabenstoppbefehl (Schritt S25). Wenn der Aufgabenstoppbefehl empfangen wird, stoppt der Mikrocontroller 36 der Einheit EPP2 eine vorbestimmte Aufgabe (Schritt S26). Danach sendet der Mikrocontroller 36 der Einheit EPP2 Informationen zu dem Abschluss des Aufgabenübergangs zu dem Mikrocontroller 32 der Einheit EPP1 und wird die Verarbeitung abgeschlossen (Schritt S27). Wenn dagegen in Schritt S21 bestimmt wird, dass der Wert des Anormalitätszählers der vorbestimmte Wert oder größer ist, wird bestimmt, ob die Einheit EPP2 nicht in der Lage ist, kontinuierlich ein Hilfsdrehmoment auszugeben (Schritt S28). Wenn NEIN, wird der Betriebsmodus zu einem sicheren Modus, wenn die EPP2 mit dem Ausgeben eines Hilfsdrehmoments fortfährt, versetzt und wird die Verarbeitung beendet (Schritt S29). Wenn JA, weil zum Beispiel ein Ausfall in dem Sensor 54, einem internen Speicher des Mikrocontrollers 36, dem Vortreiber 37, dem Wechselrichter 41 oder dem Spulensatz 13b gegeben ist, wird der Betriebsmodus zu einem sicheren Modus, wenn die Einheit EPP2 das Ausgeben eines Hilfsdrehmoments stoppt, versetzt (Schritt S30). Dann führt die Aufgabenwechselfunktionseinheit 77 eine Aufgabenwechselverarbeitung durch (Schritt S31). In einem folgenden Schritt S32 sendet der Mikrocontroller 36 der Einheit EPP2 einen Aufgabenstoppbefehl zu dem Mikrocontroller 32 der Einheit EPP1. In dem folgenden Schritt S33 empfängt der Mikrocontroller 36 der Einheit EPP2 Informationen zu dem Abschluss des Aufgabenübergangs und wird die Verarbeitung beendet. Wenn zum Beispiel eine Anormalität der zweiten Betätigungseinheit bestätigt wird, ist die Last AC2 für die Steuerung eines auszugebenden Hilfsdrehmoments nicht erforderlich und fällt deshalb nicht an, wobei jedoch die Verarbeitung einer Fehlerdiagnose fortgesetzt wird und die Last AB2 weiterhin anfällt, sodass also Hardwareressourcen verschwendet werden. Im Gegensatz dazu verwendet wie in Es ist zu beachten, dass die Aufgabenwechselverarbeitung die Lasten AA1, AA2 für den Betrieb des Mikrocontrollers im Vergleich zu der herkömmlichen Vorrichtung etwas erhöht. Weiterhin ist zum Beispiel während einer Datenaufzeichnung die Last AB2 für die Fehlerdiagnose erhöht, wobei jedoch die Last AB1 durch eine optimierte Verteilung der Rechenverarbeitung vermindert ist. Folglich ist die Gesamtlast der Einheit EPP1 und der Einheit EPP2 kleiner als während eines normalen Betriebs des Systems. Wenn bei der oben genannten Konfiguration bestimmt wird, dass eine Anormalität in dem Vortreiber, dem Wechselrichter, dem Spulensatz oder einem Ausgabesignal des Sensors einer Einheit aufgetreten ist, wird der Mikrocontroller der anderen Einheit veranlasst, das Berechnen von Steuervariablen zu stoppen, sodass eine unnötige Rechenlast reduziert werden kann und die dadurch eingesparte Kapazität für eine Berechnung für das Ausführen von anderen Aufgaben genutzt werden kann. Auf diese Weise können die begrenzten Berechnungskapazitäten der entsprechenden Mikrocontroller effizient genutzt werden. Wenn, was die Aufgabenwechselfunktionseinheit betrifft, die Diagnosefunktionseinheit bestimmt, dass eine Anormalität in dem Vortreiber, dem Wechselrichter, dem Spulensatz oder einem Ausgabesignal des Sensors aufgetreten ist, und außerdem die Betriebssteuerung für den Elektromotor nicht fortgesetzt werden kann, kann die Aufgabenwechselfunktionseinheit die Motorsteuereinheit veranlassen, die Betriebssteuerung für den Elektromotor zu stoppen und außerdem eine andere Berechnung als die Berechnung für die Betriebssteuerung des Elektromotors auszuführen. Wenn bei dieser Konfiguration bestimmt wird, dass die Betriebssteuerung für den Elektromotor nicht fortgesetzt werden kann, wird die Betriebssteuerung für den Elektromotor gestoppt, um dadurch die Sicherheit der Vorrichtung zu verbessern. Weiterhin wird die durch das Stoppen der Berechnung der Steuervariable eingesparte Berechnungskapazität für eine Berechnung für das Ausführen von anderen Aufgaben verwendet und können deshalb die Berechnungskapazitäten der entsprechenden Mikrocontroller effizient verwendet werden. In einem anderen Berechnungsbeispiel als einer Berechnung für die Betriebssteuerung des Elektromotors kann die Aufgabenwechselfunktionseinheit 67 oder die Aufgabenwechselfunktionseinheit 77 wenigstens einen Teil einer Berechnung für die Diagnosefunktionseinheit 66 und die Diagnosefunktionseinheit 76 ausführen. Indem die Aufgabenwechselfunktionseinheit wenigstens einen Teil der Berechnung für die erste Diagnosefunktionseinheit oder die zweite Diagnosefunktionseinheit durchführt, kann die Fahrzeugsteuervorrichtung die Genauigkeit der Anormalitätserfassung aufrechterhalten, ohne die Rechenlast für einen normalen Mikrocontroller zu erhöhen. Weiterhin kann die Aufgabenwechselfunktionseinheit auch wenigstens einen Teil einer Berechnung oder einer Verarbeitung, die der CAN-Kommunikationseinheit zugewiesen ist, ausführen. Durch die Zusammenwirkung mit einer anderen Fahrzeugeinrichtung kann eine Fahrunterstützungsfunktion aufrechterhalten oder verbessert werden, die eine Unterstützung für eine der anderen Fahrzeugeinrichtung zugewiesenen Berechnung, eine kooperative Steuerung mit der Fahrzeugeinrichtung sowie eine Betriebssteuerung für eine normale Betätigungseinheit, die basierend auf Informationen von der Fahrzeugeinrichtung ausgeführt wird, umfasst. Außerdem kann eine Berechnung, die einer normalen Motorsteuereinheit zugewiesen ist, übernommen werden. Insbesondere ist das Problem gegeben, dass, wenn die Betriebssteuerung für eine Betätigungseinheit in einem System gestoppt ist und weiterhin ein Mikrocontroller des anderen Systems blockiert ist oder zurückgesetzt wird, eine Ziel-Fahrzeugeinrichtung nicht kontinuierlich gesteuert werden kann. Wenn in diesem Fall die Aufgabenwechselfunktion eine der Motorsteuereinheit zugewiesene Berechnung übernimmt, kann die Betriebssteuerung der Fahrzeugsteuervorrichtung fortgesetzt werden. Im Folgenden werden spezifische Beispiele der Aufgabenwechselverarbeitung (Schritte S11, S31) von Zuerst wird in dem Schritt S41 veranlasst, dass der Mikrocontroller 32 der Einheit EPP1 eine Berechnung für die Hilfsdrehmomentsteuerung stoppt. In dem folgenden Schritt S42 wird der Mikrocontroller 32 der Einheit EPP1 veranlasst, den Start der Berechnung des Hilfsdrehmoments, die der Einheit EPP2 zugewiesen ist, einzuleiten. In dem folgenden Schritt S43 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Berechnung des Hilfsdrehmoments, die der Einheit EPP2 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S44 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für das Hilfsdrehmoment zu stoppen. In dem folgenden Schritt S45 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, den Start der Berechnung des Hilfsdrehmoments, die der Einheit EPP1 zugewiesen ist, einzuleiten. In dem folgenden Schritt S46 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Berechnung eines Hilfsdrehmoments, die der Einheit EPP1 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Wenn bei einer derartigen Aufgabenwechselverarbeitung nur die Betätigungseinheit (Spulensatz) in einem System die Steuerung fortsetzen darf, übernimmt die Aufgabenwechselfunktionseinheit des anderen Systems einen Teil der Berechnung (in diesem Beispiel die Berechnung für die Hilfsdrehmomentsteuerung), die dem Mikrocomputer des anderen Systems zugewiesen ist, um dadurch die Rechenlast für den Mikrocomputer des anderen Systems zu reduzieren und die Zuverlässigkeit der durch das Betätigungsglied des anderen Systems ausgeführten Steuerung zu verbessern. Zuerst wird in Schritt S51 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für das Hilfsdrehmoment zu stoppen. In dem folgenden Schritt S52 wird der Mikrocontroller 32 der Einheit EPP1 veranlasst, den Start der Verbesserung der Berechnungsfunktionalität für die Mikrocomputer-Interkommunikation, die der Einheit EPP2 zugewiesen ist, einzuleiten. In dem folgenden Schritt S53 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Verbesserung der Berechnungsfunktionalität für die Mikrocomputer-Interkommunikation, die der Einheit EPP2 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S54 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für das Hilfsdrehmoment zu stoppen. In dem folgenden Schritt S55 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, den Start der Verbesserung der Berechnungsfunktionalität für die Mikrocomputer-Interkommunikation, die der Einheit EPP1 zugewiesen ist, einzuleiten. In dem folgenden Schritt S56 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Verbesserung der Berechnungsfunktionalität für die Mikrocomputer-Interkommunikation, die der Einheit EPP1 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Bei einer derartigen Aufgabenwechselverarbeitung führt die Aufgabenwechselfunktionseinheit in einem System einen Teil der Berechnung, die der Mikrocomputer-Interkommunikationseinheit des anderen Systems zugewiesen ist, aus, wodurch die durch die Mikrocomputer-Interkommunikation ausgetauschte Informationsmenge vergrößert werden kann und Informationen des Mikrocontrollers in dem einen System zu dem Mikrocontroller des anderen Systems gesendet werden können. Folglich kann die Betätigungseinheit des Mikrocontrollers des anderen Systems die Steuerung mit einer größeren Zuverlässigkeit fortsetzen. Zuerst wird in dem Schritt S61 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für die Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S62 wird der Mikrocontroller 32 der Einheit EPP1 veranlasst, den Start der Verbesserung der Überwachungs-/Diagnosefunktionalität, die der Einheit EPP2 zugewiesen ist, einzuleiten. In dem folgenden Schritt S63 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Verbesserung der Überwachungs-/Diagnosefunktionalität, die der Einheit EPP2 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S64 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für die Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S65 leitet der Mikrocontroller 36 der Einheit EPP2 den Start der Verbesserung der Überwachungs-/Diagnosefunktionalität, die der Einheit EPP1 zugewiesen ist, ein. In dem folgenden Schritt S66 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Verbesserung der Überwachungs-/Diagnosefunktionalität, die der Einheit EPP1 zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Wenn die Aufgabenwechselfunktionseinheit 67 oder die Aufgabenwechselfunktionseinheit 77 wenigstens eine der Diagnosefunktionseinheit 66 oder der Diagnosefunktionseinheit 76 zugewiesene Berechnung wie oben ausführt, kann die Fahrzeugsteuervorrichtung die Genauigkeit der Anormalitätserfassung aufrechterhalten, ohne die Rechenlast für den Mikrocontroller 32 oder 36 zu erhöhen. Es ist zu beachten, dass in einer Konfiguration, in welcher die Aufgabenwechselfunktionseinheit 67 oder die Aufgabenwechselfunktionseinheit 77 wenigstens einen Teil einer der Diagnosefunktionseinheit 66 oder der Diagnosefunktionseinheit 76 zugewiesenen Berechnung ausführt, ein Zustand des Sensors 54, des Vortreibers 33, des Wechselrichters 40, des Spulensatzes 13a oder des Mikrocontrollers 32 in dem internen Speicher der Diagnosefunktionseinheit 66 oder in einem externen Speicher (nicht gezeigt) aufgezeichnet werden kann. Indem Informationen zu dem Mikrocontroller, dem Sensor und der Betätigungseinheit und insbesondere dazu, wie eine Anormalität in einem Host-System aufgetreten ist, aufgezeichnet werden, können die aufgezeichneten Informationen für das Analysieren der Nutzung während einer Wartung verwendet werden. Zuerst wird in dem Schritt S71 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S72 leitet der Mikrocontroller 32 der Einheit EPP1 den Start der Übernahme einer Berechnung, die der anderen Fahrzeugeinrichtung in dem Fahrzeug zugewiesen ist, ein. In dem folgenden Schritt S73 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Übernahme der Berechnung, die der anderen Fahrzeugeinrichtung in dem Fahrzeug zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S74 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S75 leitet der Mikrocontroller 36 der Einheit EPP2 den Start der Übernahme Berechnung, die der anderen Fahrzeugeinrichtung in dem Fahrzeug zugewiesen ist, ein. In dem folgenden Schritt S76 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Übernahme der Berechnung, die der anderen Fahrzeugeinrichtung in dem Fahrzeug zugewiesen ist, ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Bei einer derartigen Aufgabenwechselverarbeitung führt die Aufgabenwechselfunktionseinheit wenigstens einen Teil der Berechnung, die der anderen Fahrzeugeinrichtung zugewiesen ist, aus, um die Funktionalität des gesamten Fahrzeugs zu verbessern, ohne die Rechenlast für die andere Fahrzeugeinrichtung zu erhöhen. Zuerst wird in dem Schritt S81 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für die Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S82 leitet der Mikrocontroller 32 der Einheit EPP1 den Start der Berechnung für einen ESC-Betriebsbefehl, die der ESC-ECU 4 von In dem Schritt S84 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für die Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S85 leitet der Mikrocontroller 36 der Einheit EPP2 den Start einer Berechnung für einen ESC-Betriebsbefehl, der durch die ESC-ECU 4 von Wenn bei einer derartigen Aufgabenwechselverarbeitung eine Anormalität in der Servolenkvorrichtung aufgetreten ist, erzeugt die ESC (Bremskraftsteuervorrichtung) ein Drehmoment des Fahrzeugs, um eine unzureichende Lenkkraft zu kompensieren und dadurch die Lenksteuerfähigkeit und Sicherheit zu verbessern, wenn eine Anormalität erfasst wird. Zuerst wird in dem Schritt S91 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S92 leitet der Mikrocontroller 32 der Einheit EPP1 den Start einer Berechnung für einen zu einer Motorsteuerungs-ECU 2 auszugebenden Befehl ein. In dem folgenden Schritt S93 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Berechnung für einen zu der Motorsteuerungs-ECU 2 auszugebenden Befehl ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S94 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S95 leitet der Mikrocontroller 36 der Einheit EPP2 den Start einer Berechnung für einen zu der Motorsteuerungs-ECU 2 auszugebenden Befehl ein. In dem folgenden Schritt S96 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Berechnung für den zu der Motorsteuerungs-ECU 2 auszugebenden Befehl ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Wenn bei einer derartigen Aufgabenwechselverarbeitung eine Anormalität in der Servolenkvorrichtung aufgetreten ist und erfasst wird, dass eine Lenksteuerung durch den Lenkmechanismus gemäß einem Ausgabesignal des ersten oder zweiten Lenksensors für das Erfassen der Lenkbedingung des Lenkmechanismus ausgeführt wird, wird eine Motorsteuerung durch ein Motorbremsen für das Reduzieren der Motordrehzahl durchgeführt, sodass eine Last auf die als Lenkräder dienenden Vorderräder ausgeübt wird. Durch diese Operation kann eine unzureichende Lenkkraft kompensiert werden und kann die Lenksteuerfähigkeit und Sicherheit bei einer erfassten Anormalität verbessert werden. Es ist zu beachten, dass die Aufgabenwechselfunktion (Anormalzustandsspezifische-Aufgabe-Ausführeinheit) konfiguriert sein kann zum, wenn die Diagnosefunktionseinheit (Anormalitätsbestimmungseinheit) in einem System bestimmt, dass eine Anormalität in dem Vortreiber, dem Wechselrichter, dem Spulensatz oder einem Ausgabesignal des Sensors aufgetreten ist, Senden zu dem Mikrocontroller des anderen Systems eines Signals, das veranlasst, dass der Motor mit einem variierenden Hilfsdrehmoment betrieben wird. Wenn der Motor bei einer erfassten Anormalität mit einem variierenden Hilfsdrehmoment betrieben wird, fühlt ein Fahrer ein Vibrieren des Lenkrads und kann somit auf die Anormalität der Vorrichtung aufmerksam werden. Weiterhin führt die Anormalzustandsspezifische-Aufgabe-Ausführeinheit eine Berechnung für das Erzeugen der Vibrationen durch, um eine Erhöhung der Rechenlast für den Mikrocomputer zu verhindern und einen Fahrer auf eine Anormalität aufmerksam zu machen. Zuerst wird in dem Schritt S101 der Mikrocontroller 32 der Einheit EPP1 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S102 leitet der Mikrocontroller 32 der Einheit EPP1 den Start einer Verarbeitung von CAN-Sendungsfehlerinformationen ein. In dem folgenden Schritt S103 schließt der Mikrocontroller 32 der Einheit EPP1 den Start der Verarbeitung der CAN-Sendungsfehlerinformationen ab und kehrt die Verarbeitung zu dem Schritt S12 zurück. In dem Schritt S104 wird der Mikrocontroller 36 der Einheit EPP2 veranlasst, eine Berechnung für eine Hilfsdrehmomentsteuerung zu stoppen. In dem folgenden Schritt S105 leitet der Mikrocontroller 36 der Einheit EPP2 den Start der Verarbeitung von CAN-Sendungsfehlerinformationen ein. In dem folgenden Schritt S106 schließt der Mikrocontroller 36 der Einheit EPP2 den Start der Verarbeitung der CAN-Sendungsfehlerinformationen ab und kehrt die Verarbeitung zu dem Schritt S32 zurück. Wie zuvor beschrieben, werden durch die Diagnosefunktionseinheit erfasste Informationen so wie sie sind zu einer Form verarbeitet, die über das CAN gesendet werden kann und durch eine andere Fahrzeugeinrichtung, die die Informationen empfangen soll, verarbeitet werden kann. Diese Verarbeitung ermöglicht es, Anormalitätsinformationen einer bestimmten Fahrzeugeinrichtung in geeigneter Weise mit der anderen Fahrzeugeinrichtung zu teilen, ohne die Rechenlast für die andere Fahrzeugeinrichtung zu erhöhen. Es ist zu beachten, dass die andere Fahrzeugeinrichtung die Informationen zu einer Anormalität in dem Vortreiber, dem Wechselrichter, dem Spulensatz oder einem Ausgabesignal des Sensors zu außerhalb des Fahrzeugs senden kann. Wenn zum Beispiel die Anormalitätsinformationen zu einem Kfz-Servicecenter oder einem Fahrverwaltungsunternehmen gesendet werden, kann ein Fahrbefehl korrekt zu dem Fahrzeug gesendet werden, kann ein Abschlepp- oder Pannenfahrzeug organisiert werden oder kann eine andere folgende Problembehandlungsaktion durchgeführt werden. Und wenn die Diagnosefunktionseinheit in einem System bestimmt, dass eine Anormalität in dem Vortreiber, dem Wechselrichter, dem Spulensatz oder einem Ausgabesignal des Sensors aufgetreten ist, kann die Aufgabenwechselfunktionseinheit diese Anormalitätsinformationen und Informationen zu dem Status eines entsprechenden Mikrocontrollers in einem Speicher der Diagnosefunktionseinheit des anderen Systems oder eines externen Speichers (nicht gezeigt) aufzeichnen. Indem die Anormalitätsinformationen mit der anderen Fahrzeugeinrichtung geteilt werden und auch in dem Mikrocontroller aufgezeichnet werden, kann eine Zustandsanalyse mit einer hohen Genauigkeit während einer Wartung durchgeführt werden. Es ist zu beachten, dass die Erfindung nicht auf die oben beschriebenen Ausführungsformen beschränkt ist, die auf verschiedene Weise modifiziert werden können, ohne dass deshalb der Erfindungsumfang verlassen wird. Zum Beispiel enthalten in den oben beschriebenen Ausführungsformen die ersten und zweiten Mikrocontroller jeweils eine Aufgabenwechselfunktionseinheit, wobei aber auch nur einer derselben eine Aufgabenwechselfunktionseinheit enthalten kann. Weiterhin können zwei oder mehr der Aufgabenwechselverarbeitungen 1 bis 7 frei gewählt und in einer Kombination verwendet werden. Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen. Es wird eine Fahrzeugsteuervorrichtung vorgesehen, die in einer redundanten Konfiguration die Verwendung eines normal betriebenen Teils in einem ausgefallenen System ermöglicht. Eine Fahrzeugsteuervorrichtung mit einer redundanten Konfiguration enthält eine Aufgabenwechselfunktionseinheit, die konfiguriert ist zum Wechseln von auszuführenden Aufgaben, wenn eine Anormalität erfasst wird. Die Aufgabenwechselfunktionseinheit ist konfiguriert zum, wenn eine Diagnosefunktionseinheit bestimmt, dass eine Anormalität in einer Einheit eines Host-Systems aufgetreten ist, Veranlassen der Einheit des ausgefallenen Systems, eine Berechnung einer Steuervariable zu stoppen und eine Betriebssteuerung für ein Steuerobjekt zu stoppen und dann eine andere Berechnung als die Berechnung der Steuervariable des Host-Systems für die Betriebssteuerung des Steuerobjekts auszuführen, sodass die Berechnungseinheit des ausgefallenen Systems wenigstens einen Teil der Berechnung eines normalen Systems oder einer anderen Fahrzeugeinrichtung übernehmen kann. Fahrzeugsteuervorrichtung, umfassend:
Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach Fahrzeugsteuervorrichtung nach TECHNISCHES GEBIET
STAND DER TECHNIK
REFERENZDOKUMENTE
PATENTDOKUMENTE
ZUSAMMENFASSUNG DER ERFINDUNG
PROBLEMSTELLUNG DER ERFINDUNG
PROBLEMLÖSUNG
EFFEKTE DER ERFINDUNG
Figurenliste
AUSFÜHRUNGSFORM DER ERFINDUNG
Aufgabenwechselverarbeitung 1
Aufgabenwechselverarbeitung 2
Aufgabenwechselverarbeitung 3
Aufgabenwechselverarbeitung 4
Aufgabenwechselverarbeitung 5
Aufgabenwechselverarbeitung 6
Aufgabenwechselverarbeitung 7
Bezugszeichenliste
ZITATE ENTHALTEN IN DER BESCHREIBUNG
Zitierte Patentliteratur
einen ersten Sensor, der konfiguriert ist zum Erfassen einer Zustandsvariable, die einen Betriebszustand eines Fahrzeugs angibt,
eine erste Betätigungseinheit, die konfiguriert ist für einen Betrieb basierend auf einem Ausgabesignal des ersten Sensors,
einen ersten Mikrocomputer, der konfiguriert ist zum Steuern der ersten Betätigungseinheit,
wobei der erste Mikrocomputer umfasst:
eine erste Sensorsignal-Eingabeeinheit, die konfiguriert ist zum Empfangen eines Ausgabesignals des ersten Sensors,
eine erste Steuervariablen-Berechnungseinheit, die konfiguriert ist zum Berechnen einer ersten Steuervariable, die verwendet wird zum Ausführen einer Betriebssteuerung für die erste Betätigungseinheit basierend auf dem Ausgabesignal des ersten Sensors,
eine erste Betriebssteuereinheit, die konfiguriert ist zum Ausführen einer Betriebssteuerung für die erste Betätigungseinheit basierend auf der ersten Steuervariable, und
eine erste Anormalitätsbestimmungseinheit, die konfiguriert ist zum Bestimmen des Vorhandenseins oder der Abwesenheit einer Anormalität in der ersten Betätigungseinheit oder dem Ausgabesignal des ersten Sensors,
einen zweiten Sensor, der konfiguriert ist zum Erfassen einer Zustandsvariable, die einen Betriebszustand des Fahrzeugs angibt,
eine zweite Betätigungseinheit, die konfiguriert ist für einen Betrieb basierend auf einem Ausgabesignal des zweiten Sensors,
einen zweiten Mikrocomputer, der konfiguriert ist zum Steuern der zweiten Betätigungseinheit,
wobei der zweite Mikrocomputer umfasst:
eine zweite Sensorsignal-Eingabeeinheit, die konfiguriert ist zum Empfangen des Ausgabesignals des zweiten Sensors,
eine zweite Steuervariablen-Berechnungseinheit, die konfiguriert ist zum Berechnen einer zweiten Steuervariable, die verwendet wird zum Ausführen einer Betriebssteuerung für die zweite Betätigungseinheit basierend auf dem Ausgabesignal des zweiten Sensors,
eine zweite Betriebssteuereinheit, die konfiguriert ist zum Ausführen einer Betriebssteuerung für die zweite Betätigungseinheit basierend auf der zweiten Steuervariable,
eine zweite Anormalitätsbestimmungseinheit, die konfiguriert ist zum Bestimmen des Vorhandenseins oder der Abwesenheit einer Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors, und
eine Anormalzustandsspezifische-Aufgabe-Ausführeinheit, die konfiguriert ist zum, wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, Veranlassen der zweiten Steuervariablen-Berechnungseinheit, eine Berechnung der zweiten Steuervariable zu stoppen, und zum Veranlassen der zweiten Betriebssteuereinheit, die Betriebssteuerung für die zweite Betätigungseinheit zu stoppen und weiterhin eine andere Berechnung als die Berechnung der zweiten Steuervariable für die Betriebssteuerung der zweiten Betätigungseinheit auszuführen, und
eine Mikrocomputer-Interkommunikationseinheit, die konfiguriert ist zum Ausführen einer Mikrocomputer-Interkommunikation, die dem Senden und Empfangen eines Signals zwischen dem ersten Mikrocomputer und dem zweiten Mikrocomputer entspricht.
der erste Mikrocomputer oder der zweite Mikrocomputer eine CAN (Controller Area Network)-Kommunikationseinheit enthält, die konfiguriert ist zum Ausführen einer CAN-Kommunikation als einer Kommunikation mit einer anderen Fahrzeugeinrichtung, und
wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, die Anormalzustandsspezifische-Aufgabe-Ausführeinheit wenigstens einen Teil einer Berechnung, die der CAN-Kommunikationseinheit zugewiesen ist, ausführt.
der erste Mikrocomputer oder der zweite Mikrocomputer eine CAN (Controller Area Network)-Kommunikationseinheit enthält, die konfiguriert ist zum Ausführen einer CAN-Kommunikation als einer Kommunikation mit einer anderen Fahrzeugeinrichtung, und
wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, die Anormalzustandsspezifische-Aufgabe-Ausführeinheit wenigstens einen Teil einer Berechnung, die der anderen Fahrzeugeinrichtung zugewiesen ist, ausführt.
die Fahrzeugsteuervorrichtung eine Servolenkvorrichtung umfasst, wobei die Servolenkvorrichtung umfasst:
einen Lenkmechanismus, der konfiguriert ist zum Übertragen einer Lenkoperation eines Lenkrads zu einem Paar von sich drehenden Rädern,
einen Elektromotor, der als die erste Betätigungseinheit und die zweite Betätigungseinheit dient und konfiguriert ist zum Ausüben einer Lenkkraft auf den Lenkmechanismus, und
einen ersten Lenksensor und einen zweiten Lenksensor, die als der erste Sensor und der zweite Sensor dienen und konfiguriert sind zum Erfassen einer Lenkbedingung des Lenkmechanismus,
wobei die erste Steuervariablen-Berechnungseinheit des ersten Mikrocomputers eine Betriebssteuerung für die erste Betätigungseinheit unter Verwendung einer ersten Steuervariable, die basierend auf einem Ausgabesignal des ersten Lenksensors berechnet wird, durchführt,
wobei die erste Steuervariablen-Berechnungseinheit des zweiten Mikrocomputers eine Betriebssteuerung für die zweite Betätigungseinheit unter Verwendung einer zweiten Steuervariable, die basierend auf einem Ausgabesignal des zweiten Lenksensors berechnet wird, durchführt,
wobei, wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, die Anormalzustandsspezifische-Aufgaben-Ausführeinheit ein Bremskraftbefehlssignal zu einer Bremskraftsteuervorrichtung ausgibt, die verschiedene Bremskräfte auf das Paar von sich drehenden Rädern ausüben kann, und
wobei das Bremskraftbefehlssignal verwendet wird, um eine Betriebssteuerung der Bremskraftsteuervorrichtung durchzuführen, sodass die Bremskraftsteuervorrichtung verschiedene Bremskräfte auf das Paar von sich drehenden Rädern ausübt, um dadurch eine Drehbewegung des Fahrzeugs zu veranlassen.
die Fahrzeugsteuervorrichtung eine Servolenkvorrichtung umfasst, wobei die Servolenkvorrichtung umfasst:
einen Lenkmechanismus, der konfiguriert ist zum Übertragen einer Lenkoperation eines Lenkrads auf ein Paar von sich drehenden Rädern,
einen Elektromotor, der als die erste Betätigungseinheit und die zweite Betätigungseinheit dient und konfiguriert ist zum Ausüben einer Lenkkraft auf den Lenkmechanismus, und
einen ersten Lenksensor und einen zweiten Lenksensor, die als der erste Sensor und der zweite Sensor dienen und konfiguriert sind zum Erfassen einer Lenkbedingung des Lenkmechanismus,
wobei die erste Steuervariablen-Berechnungseinheit des ersten Mikrocomputers eine Betriebssteuerung für die erste Betätigungseinheit unter Verwendung einer ersten Steuervariable, die basierend auf einem Ausgabesignal des ersten Lenksensors berechnet wird, durchführt,
wobei die erste Steuervariablen-Berechnungseinheit des zweiten Mikrocomputers eine Betriebssteuerung für die zweite Betätigungseinheit unter Verwendung einer zweiten Steuervariable, die basierend auf einem Ausgabesignal des zweiten Lenksensors berechnet wird, durchführt,
wobei die Anormalzustandsspezifische-Aufgabe-Ausführeinheit, wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, ein Motorsteuerbefehlssignal zu einer Motorsteuereinrichtung ausgibt, die konfiguriert ist zum Steuern der Verbrennung eines Verbrennungsmotors des Fahrzeugs, und
wobei das Motorsteuerbefehlssignal verwendet wird zum Einstellen einer Verbrennungsbedingung des Verbrennungsmotors gemäß einem Ausgabesignal des ersten Lenksensors oder einem Ausgabesignal des zweiten Lenksensors.
die Fahrzeugsteuervorrichtung eine Servolenkvorrichtung umfasst, wobei die Servolenkvorrichtung umfasst:
einen Lenkmechanismus, der konfiguriert ist zum Übertragen einer Lenkoperation eines Lenkrads auf ein Paar von sich drehenden Rädern,
einen Elektromotor, der als die erste Betätigungseinheit und die zweite Betätigungseinheit dient und konfiguriert ist zum Ausüben einer Lenkkraft auf den Lenkmechanismus, und
einen ersten Lenksensor und einen zweiten Lenksensor, die als der erste Sensor und der zweite Sensor dienen und konfiguriert sind zum Erfassen einer Lenkbedingung des Lenkmechanismus,
wobei die erste Steuervariablen-Berechnungseinheit des ersten Mikrocomputers eine Betriebssteuerung für die erste Betätigungseinheit unter Verwendung einer ersten Steuervariable, die basierend auf einem Ausgabesignal des ersten Lenksensors berechnet wird, durchführt,
wobei die erste Steuervariablen-Berechnungseinheit des zweiten Mikrocomputers eine Betriebssteuerung für die zweite Betätigungseinheit unter Verwendung einer zweiten Steuervariable, die basierend auf einem Ausgabesignal des zweiten Lenksensors berechnet wird, durchführt, und
wobei die Anormalzustandsspezifische-Aufgabe-Ausführeinheit, wenn die zweite Anormalitätsbestimmungseinheit bestimmt, dass eine Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors aufgetreten ist, ein Signal ausgibt, dass einen Betrieb der ersten Betätigungseinheit mit einem variierenden Hilfsdrehmoment veranlasst.
der erste Mikrocomputer oder der zweite Mikrocomputer eine CAN (Controller Area Network)-Kommunikationseinheit enthält, die konfiguriert ist zum Durchführen einer CAN-Kommunikation als einer Kommunikation mit einer anderen Fahrzeugeinrichtung, und
wobei die Anormalzustandsspezifische-Aufgabe-Ausführeinheit Informationen zu einer Anormalität in der zweiten Betätigungseinheit oder dem Ausgabesignal des zweiten Sensors, die durch die zweite Anormalitätsbestimmungseinheit erfasst wird, zu einer Form verarbeitet, die zu der anderen Fahrzeugeinrichtung über die CAN-Kommunikationseinheit gesendet werden kann.