Control device and adjustment system of a motor vehicle
Verstellsystem eines Kraftfahrzeugs, insbesondere einer Heckklappe,
[0001] Die Erfindung betrifft eine Steuerungsvorrichtung und ein Verstellsystem eines Kraftfahrzeugs.
[0002] Aus der DE 37 36 400 A1 ist einVerstellantrieb bekannt. Bei diesem wird zur Erfüllung einer vorgegebenen Federrate in bestimmtenVersteilbereichen zur Herabsetzung der kinematischen Energie eine Drehzahl- bzw. Geschwindigkeitsreduzierungdes Antriebs vorgenommen. Das bewegliche Teil wird mittels eines Antriebsmotors über einen gefährdeten Klemmbereich,in dem Fremdkörper zwischen dem beweglichen Teil und einem ruhenden Teil einklemmbar sind, ineine Schließstellung bewegt. Wegen unvermeidlicher Verzögerung bei der Signalverarbeitung undder Trägheit des mechanisch bewegten Teils, kann trotz einer den Einklemmschutz darstellendenSicherheitsvorrichtung der Fremdkörper zwischen dem bewegten Teil und dem ruhenden Teil eingeklemmtwerden.
[0003] Um dieses zu vermeiden ist in der DE 37 36400 A1 vorgesehen, dass die Verstellgeschwindigkeit beim Schließen des beweglichenTeils in dem gefährdeten Klemmbereich verringert wird. Der eigentliche Einklemmschutz kann danngegebenenfalls das bewegliche Teil augenblicklich anhalten und eventuell die Bewegungsrichtungumkehren (Reversieren). Bei diesem bekannten Verstellantrieb erfolgt die Reduzierung der Geschwindigkeit inStufen, d. h. es wird von einer hohen Stufe in einem Schritt auf eine niedrige Stufe der Schließgeschwindigkeitumgeschaltet.
[0004] In der DE 196 18 484 A1 ist einVerstellantrieb mit Einklemmschutz offenbart, der einen kontinuierlichen Übergang von einerhohen auf eine bestimmte niedrige Schließgeschwindigkeit aufweist. Innerhalb eines vorgegebenenBereichs vor Erreichen der "Geschlossen"-Position wird die Drehzahl oder die Leistung des Antriebsnach einem vorgegebenen funktionalen Zusammenhang abgesenkt, so dass die Absenkung auf eine Minimaldrehzahlbzw. Minimalleistung innerhalb eines bestimmten Positionsbereichs erfolgt. Die Minimaldrehzahlbzw. Minimalleistung wird an einer bestimmten Position vor der "Geschlossen"-Position erreicht.Dabei ist die Minimaldrehzahl bzw. Minimalleistung im Wesentlichen konstant. Die Absenkung der Drehzahloder der Leistung des Antriebs erfolgt linear oder nach einer Exponentialfunktion.
[0005] Die Absenkung erfolgt in der DE 196 18 484A1 nach einem vorgegebenen funktionalen Zusammenhang auf die Minimaldrehzahl bzw.Minimalleistung über einen konstanten Positionsbereich, wobei sich die Absenkungsgeschwindigkeitin Abhängigkeit von der aktuellen Versorgungsleistung, ändert. Oder es erfolgt die Absenkungauf die Minimaldrehzahl bzw. Minimalleistung über einen variablen Positionsbereich, wobei sichdessen Startpunkt in Abhängigkeit von der jeweils aktuellen Versorgungsleistung ändert. Dienotwendige Minimaldrehzahl bzw. Minimalleistung wird dabei empirisch derart ermittelt, dass unterallen Bedingungen, wie insbesondere Temperatur und Feuchtigkeit, noch ausreichend hohe Schließkräftegewährleistet sind.
[0006] Die Steuerung der Drehzahl bzw. der Leistung des elektrischen Antriebs erfolgt in derDE 196 18 484 A1 durch Halbleiterbauelemente,wie Linearregler oder Taktregler mit variablem Puls-Pausen-Verhältnis. Der Verstellantrieb istzusammen mit einer Schaltung für den Schutz gegen Einklemmen von Fremdkörpern zwischen einembewegten Teil und einem festen Anschlag in der "Geschlossen"-Position einsetzbar Bei der Berechnungder Drehzahlabsenkung durch Einklemmvorgänge wird die jeweils bekannte Steigung der Absenkungnach einem vorgegebenen funktionalen Zusammenhang von Drehzahl oder Leistung des Antriebs alsKorrekturfaktor berücksichtigt. Zur Korrektur ist ein adaptiver Speicher vorgesehen, in welchem diegesteuerte Absenkung von Drehzahl oder Leistung als geringfügige Schwergängigkeit gespeichertist.
[0007] Der Erfindung liegt die Aufgabe zu Grunde eine Steuerungsvorrichtung oder ein Verstellsystemanzugeben, dass die sichtbare Verstellbewegung für den Nutzer optisch möglichst verbessert.
[0008] Diese Aufgabe wird durch ein Verstellsystem mit den Merkmalen des Anspruchs 1, durchein Verstellsystem mit den Merkmalen des Anspruchs 6, durch ein Verstellsystem mit den Merkmalendes Anspruchs 9, durch ein Verstellsystem mit den Merkmalen des Anspruchs 11 oder durch ein Verstellsystemmit den Merkmalen des Anspruchs 17 gelöst. Weiterhin wird die Erfindung durch eine Steuerungsvorrichtungmit den Merkmalen des Anspruchs 21 gelöst. Vorteilhafte Weiterbildungen der Erfindung sind Gegenstandvon abhängigen Ansprüchen.
[0009] Demzufolge ist eine Steuerungsvorrichtung zum Betrieb eines Verstellsystems eines Kraftfahrzeugs,insbesondere einer Heckklappe vorgesehen. Diese Steuerungsvorrichtung weist eine Recheneinheitauf, die mit Funktionen zur Steuerung des Verstellsystems eingerichtet ist. Diese Funktionen können durchHardware oder durch einen implementierten Programmablauf realisiert werden. Ebenso wird dieAufgabe durch ein Verstellsystem mit einer derartigen Recheneinheit gelöst, dessen Funktionenebenfalls entsprechend implementiert sind.
[0010] Weiterhin weist das Verstellsystem einen Antrieb zur Verstellung eines Verstellteils, einenTreiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, und einen Sensor zurMessung einer Istgeschwindigkeit des Antriebs auf. Der Antrieb, der Treiber und der Sensor sind dabei vorzugsweise ein Teil eines elektrischen Schaltkreises derSteuerungsvorrichtung. Weiterhin ist die Recheneinheit mit dem Treiber und mit dem Sensor verbunden.
[0011] Gemäß einer ersten Erfindungsvariante ist zur Realisierung der Funktionen die Recheneinheiteingerichtet - eine Verstellbewegung eines Verstellteils zu regeln,- zur Regelung die Istgeschwindigkeit und mit einer Sollgeschwindigkeit zu vergleichen, - die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktionmit einer Anzahl von Verstellphasen mit unterschiedlicher Sollgeschwindigkeit oder mit unterschiedlichem Verlaufder Sollgeschwindigkeit zu bestimmen, und- die Sollgeschwindigkeit oder den Verlauf der Sollgeschwindigkeit innerhalb mindestens einerVerstellphase in Abhängigkeit von der Startposition und/oder der Zielposition zu bestimmen.
[0012] Für die Funktionen kann beispielsweise ein Verfahren zum Betrieb eines Verstellsystems genutztwerden, dass durch Schaltvorgänge einer Hardware (ROM, FPGA) oder durch eine Software in derRecheneinheit implementiert ist.
[0013] Das Verstellteil ist beispielsweise eine Heckklappe, die durch den Antrieb motorischverstellbar ist. Zur Regelung der Verstellbewegung des Verstellteils ist vorzugsweise ein Reglermit integralem Verhalten (PI-Regler, PID-Regler) implementiert. Der Regler weist dabei zumindest eineRegelschleife auf, innerhalb derer die Istgeschwindigkeit gemessen und eine Sollgeschwindigkeitvorgebbar ist. Die Sollgeschwindigkeit ist dabei eine Funktion, die von der Startposition undder Zielposition einer jeden Verstellbewegung abhängig ist. Beginnt die Verstellposition beispielsweisein der Mitte des Verstellweges ist die Funktion der Sollgeschwindigkeit von dieser Startposition inder Mitte und von der voraussichtlichen Zielposition - beispielsweise eine geschlossene Positionoder eine vollständig geöffnete Position - entsprechend der angewählten Verstellrichtung abhängig. Fürkurze mögliche Verstellwege ist beispielsweise eine Sollfunktion mit geringer Sollgeschwindigkeit vorgesehen.Ebenfalls ist es möglich zusätzlich eine Beschleunigung und/oder eine Abbremsung als Verlaufder Sollgeschwindigkeit in der Sollfunktion in Abhängigkeit von der Startposition und/oder derZielposition zu verändern. Verschiedene Verstellphasen der Sollfunktion weisen dabei unterschiedlicheVerläufe auf, wobei beispielsweise zumindest eine Verstellphase zur Beschleunigung und zumindesteine Verstellphase zur Abbremsung vorsehen ist.
[0014] Gemäß einer vorteilhaften Ausgestaltung der Erfindung ist vorgesehen, dass der Verlaufder Sollgeschwindigkeit verstellpositionsabhängig und/oder verstellzeitabhängig ist. Beispielsweisekann eine Beschleunigungsphase auf eine halbe Sekunde und eine Abbremsphase auf 10cm Verstellwegdes Verstellteils eingestellt sein.
[0015] In einer bevorzugten Ausgestaltung ist vorgesehen, dass die Sollfunktion in Folge eineBeschleunigungsphase, eine an die Beschleunigungsphase anschließenden Gleichlaufphase, einean die Gleichlaufphase anschließenden Abbremsphase und eine an die Abbremsphase anschließendenLangsamlaufphase aufweist. Diese Phasen können dabei noch weiter unterteilt werden, indem beispielsweisedie Gleichlaufphase in unterschiedliche Teile mit unterschiedlichen auf das Verstellsystem wirkendenphysikalischen Einflüssen unterteilt wird. Vorzugsweise schließen die Phasen einander unmittelbar an.In einer alternativen Ausgestaltung sind weitere Zwischenphasen vorgesehen, so dass sich dieBeschleunigungsphase, die Gleichlaufphase, die Abbremsphase und die Langsamlaufphase nicht unmittelbareinander anschließen.
[0016] In eine vorteilhaften Ausgestaltung wird die Sollfunktion mit einer Ausgleichsphase bestimmt,wobei in der Ausgleichsphase eine Änderung einer durch zumindest einen mechanischen Energiespeicherdem Verstellsystem zugeführte oder entzogene Energie im Verlauf der Sollgeschwindigkeit, insbesondere füreine gleichmäßige Istgeschwindigkeit ausgleichend, berücksichtigt wird. Ein derartiger Energiespeicherist beispielsweise ein Federsystem aus einer oder mehrerer Federn, wie Spiralfeder, Blattfedernoder Druckluftfedern. Ein weitere mögliche Energie kann als potentielle Energie durch die Erdanziehungskraft gespeichertsein.
[0017] In einer vorteilhaften Weiterbildung ist vorgesehen, dass die Sollgeschwindigkeit zumindesteiner Verstellphase und/oder der Verlauf der Sollgeschwindigkeit zumindest einer Verstellphaseund/oder die Sollfunktion in Abhängigkeit von einer zum Zustand des Verstellsystems korrelierendenGröße, insbesondere einer aktuellen Temperatur des Verstellsystems, einer Versorgungsspannung, einerVerstelldauer oder einer Sensierung einer Hanglage des Kraftfahrzeugs, bestimmt wird. Die Sollfunktionwird beispielsweise derart angepasst, dass eine Regelreserve erhalten bleibt. Beispielsweiseführt eine Hanglage eines Kraftfahrzeugs zu einer signifikanten Gewichtskraft einer Schiebetür, dieentgegen der Schwerkraft geschlossen wird. In diesem Fall wird die Sollgeschwindigkeit und damitnatürlich auch die Verstellgeschwindigkeit reduziert um eine Regelreserve von beispielsweise5 % zu behalten, die zur Ausregelung von lokalen Schwergängigkeit genutzt werden.
[0018] Eine zweite, auch kombinierbare Erfindungs-variante sieht ebenfalls vor, dass eine Verstellbewegung eines Verstellteils geregelt wird,zur Regelung eine Istgeschwindigkeit gemessen und mit einer Sollgeschwindigkeit verglichen wirdund die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktionmit einer Anzahl von Verstellphasen bestimmt wird.
[0019] Gemäß dieser zweiten Erfindungsvariante ist als Verstellphase eine Abbremsphase vorgesehen,innerhalb derer die Sollfunktion als fallende Funktion hin zu einer Minimalsollgeschwindigkeitbestimmt wird. Die Minimalsollgeschwindigkeit ist dabei ein Teil der Sollfunktion. Die Minimalsollgeschwindigkeit istbeispielsweise eine der Verstellphasen und kann auch als Langsamlaufphase bezeichnet werden.
[0020] Die Steuerungsvorrichtung des Verstellsystems ist dabei derart eingerichtet, dass diefallende Funktion der Abbremsphase in Abhängigkeit von einem zu mechanischen Schwingungen neigendenFeder-Masse-Systems des Verstellsystems und einer Sollgeschwindigkeit zu Beginn der Abbremsphasederart bestimmt wird, dass durch die fallende Funktion der Abbremsphase ein Überschwingen desFeder-Masse-Systems derart bedämpft wird, dass vor der Zielposition die Istgeschwindigkeit dieMinimalgeschwindigkeit erreicht. Das Feder-Masse-System ist beispielsweise eine Heckklappe,die eine Elastizität als Feder und einen Aufbau aus Karosserie, Schloss, Scheibe etc. als Masseaufweist.
[0021] In einer bevorzugten Weiterbildung ist vorgesehen, dass die Steilheit der Funktion derAbbremsphase in Abhängigkeit von der Sollgeschwindigkeit zu Beginn der Abbremsphase bestimmtwird, indem für eine höhere Sollgeschwindigkeit eine geringere Steilheit der Funktion und füreine geringere Sollgeschwindigkeit eine höhere Steilheit der Funktion bestimmt wird.
[0022] Gemäß einer vorteilhaften Ausgestaltung ist vorgesehen, dass zumindest eine auf das Feder-Masse-Systemwirkende Kraft verstellpositionsabhängig veränderlich ist. Diese Kraft kann beispielsweise durchein Federsystem erzeugt werden, dass zusammen mit einer Gewichtskraft einen Kipppunkt aufweist. Indiesem Kipppunkt ändert sich die Richtung der wirkenden Kraft bezüglich der Verstellrichtung. Eineandere wirkende Kraft ist beispielsweise eine Dichtkraft, die in einer Verstellposition beimAuftreffen des Verstellteils auf eine Dichtung erzeugt wird. Vorzugsweise wird die fallendeFunktion in der Abbremsphase in Abhängigkeit von zumindest einer Verstellposition dieser fallendenFunktion bestimmt.
[0023] In einer dritten, auch kombinierbaren Erfindungsvariante ist ebenfalls vorgesehen, dasseine Verstellbewegung eines Verstellteils geregelt wird, zur Regelung eine Istgeschwindigkeitgemessen und mit einer Sollgeschwindigkeit verglichen wird und die Sollgeschwindigkeit von einerStartposition zu einer Zielposition durch eine Sollfunktion mit einer Anzahl von Verstellphasenbestimmt wird.
[0024] In dieser dritten Erfindungsvariante ist als Verstellphase eine Beschleunigungsphase vorgesehen,innerhalb derer die Sollfunktion als steigende Funktion hin zu einer Gleichlaufgeschwindigkeitbestimmt wird. Die steigende Funktion der Beschleunigungsphase wird in Abhängigkeit von einemzu mechanischen Schwingungen neigenden Feder-Masse-Systems des Verstellsystems und einer Sollgeschwindigkeitzu Beginn der Beschleunigungsphase derart bestimmt, dass durch die steigende Funktion der Beschleunigungsphase einÜberschwingen des Feder-Masse-Systems bedämpft wird, so dass vorzugsweise Schwingungen des Verstellteilsdurch das Auge nicht wahrnehmbar sind.
[0025] Gemäß einer bevorzugten Weiterbildung ist vorgesehen, dass während der Regelung in Abhängigkeit vonder Istgeschwindigkeit ein Einklemmfall ermittelt wird. Der Einklemmfall wird dabei vorzugsweiseaus einer zeitlichen oder örtlichen Änderung der Istgeschwindigkeit errechnet, die zu einerKraftänderung am eingeklemmten Objekt korreliert.
[0026] In einer vierten, auch kombinierbaren Erfindungsvariante ist ebenfalls vorgesehen, dasseine Verstellbewegung eines Verstellteils geregelt wird, zur Regelung eine Istgeschwindigkeitgemessen und mit einer Sollgeschwindigkeit verglichen wird und die Sollgeschwindigkeit von einerStartposition zu einer Zielposition durch eine Sollfunktion mit einer Anzahl von Verstellphasenbestimmt wird.
[0027] In dieser vierten Erfindungsvariante ist vorgesehen, dass während der Regelung in Abhängigkeit voneiner von der Verstellbewegung abhängigen Messgröße und/oder einer Regelgröße der Regelung ein Einklemmfallermittelt wird. Zur Ermittelung des Einklemmfalls werden dabei zumindest zwei Algorithmen verwendet.Innerhalb zumindest einer Verstellphase wird einer der zumindest zwei Algorithmen unempfindlicher gesetzt.Um einen Algorithmus unempfindlicher zu setzen, könnte beispielsweise ein Parameter des Algorithmusverändert werden.
[0028] Gemäß einer besonders bevorzugten Weiterbildung der Erfindung ist vorgesehen, dass diezumindest zwei Algorithmen innerhalb zumindest einer Verstellphase eine unterschiedliche Selektivität zwischeneiner Einklemmkraft und einer Störkraft aufweisen. Eine Störkraft kann beispielsweise durcheine Schwergängigkeit oder durch dynamische Kräfte des Systems verursacht werden. Das Auftretendieser Störkraft stellt jedoch keinen Einklemmfall dar. Wird von der Recheneinheit diese Störkraft fälschlicherweiseals Einklemmfall interpretiert, wird die ei-gentlich gewünschte Verstellbewegung angehalten oder die Verstellrichtung umgekehrt (Fehlreversieren). Wirdder diesbezügliche Algorithmus unempfindlicher geschalten, wird auch die Einklemmkraft erhöht.Daher ist eine hohe Sensitivität für eine Einklemmkraft bei gleichzeitiger geringer Sensitivitätfür eine Störkraft gefordert. Das Verhältnis dieser Sensitivitäten kann als Selektivität bezeichnetwerden. Bevorzugt wird derjenige der Algorithmen mit der kleineren Selektivität unempfindlicherim Verhältnis zu dem Algorithmus mit der größeren Selektivität gesetzt.
[0029] Gemäß einer vorteilhaften Ausgestaltung wird zur Setzung der Unempfindlichkeit der entsprechendeAlgorithmus mit der kleineren Selektivität innerhalb der Verstellphase deaktiviert. Hierdurchkann Rechenleistung der Recheneinheit eingespart werden.
[0030] Zudem ist vorteilhafterweise möglich die Selektivität eines Algorithmus zu optimieren.Hierzu ist vorzugsweise vorgesehen, dass die Selektivität einer der zwei Algorithmen innerhalbeiner Verstellphase des Sollfunktion durch Einstellung einer Anzahl von Parametern maximiertwird. Hierbei wird beispielsweise eine Dynamik des Systems bei einer Beschleunigung oder Abbremsungberücksichtigt. In Ausgestaltungen ist vorgesehen, dass das Unempfindlichsetzen bezüglich einerVerstellphase oder verstellpositionsabhängig erfolgt.
[0031] In einer fünften, auch kombinierbaren Erfindungsvariante ist ebenfalls vorgesehen, dasseine Verstellbewegung eines Verstellteils geregelt wird, zur Regelung eine Istgeschwindigkeitgemessen und mit einer Sollgeschwindigkeit verglichen wird. Dabei kann optional die Sollgeschwindigkeitvon einer Startposition zu einer Zielposition durch eine Sollfunktion mit einer Anzahl von Verstellphasenbestimmt werden.
[0032] Gemäß dieser fünften Erfindungsvariante wird die Istgeschwindigkeit mit einer Schwellgeschwindigkeit verglichen.Wenn die Istgeschwindigkeit die Schwellgeschwindigkeit unterschreitet, wird eine Stellgrößeder Regelung integriert, die zu einer zum Motor zugeführten Leistung zugeordnet ist. Wenn dasIntegral der Stellgröße einen Integralschwellwert überschreitet, wird der Motor gestoppt oderseine Verstellrichtung umgekehrt.
[0033] Bevorzugt erfolgt während der Integration keine Auswertung der Istgeschwindigkeit. DieErkennung des Einklemmfalles erfolgt dabei vorteilhafterweise ausschließlich anhand der Auswertungdes Integralwertes.
[0034] Gemäß einer vorteilhaften Weiterbildung wird die Schwellgeschwindigkeit in Abhängigkeit voneine zum Zustand des Verstellsystems korrelierenden Größe verändert. Diese Größe ist beispielsweiseeine Temperatur, eine Versorgungsspannung, eine Federsteifigkeit einer Verstellmechanik desVerstellsystems oder eine Sollgeschwindigkeit.
[0035] Sämtliche Erfindungsvarianten können weitergebildet werden, indem ein Regelparameterder Regelung in Abhängigkeit von der jeweiligen Verstellphase und/oder von der Sollgeschwindigkeitund/oder dem Verlauf der Sollgeschwindigkeit bestimmt wird. Eine andere variantenübergreifendeWeiterbildung sieht eine Positionssensierung vor. Zur Positionssensierung wird beispielsweiseeine Sensierung einer Rastung in einer Schlossraste zusätzlich ausgewertet.
[0036] Im Folgenden wird die Erfindung anhand von Ausführungsbeispielen in zeichnerischen Darstellungennäher erläutert.
[0037] Dabei zeigen
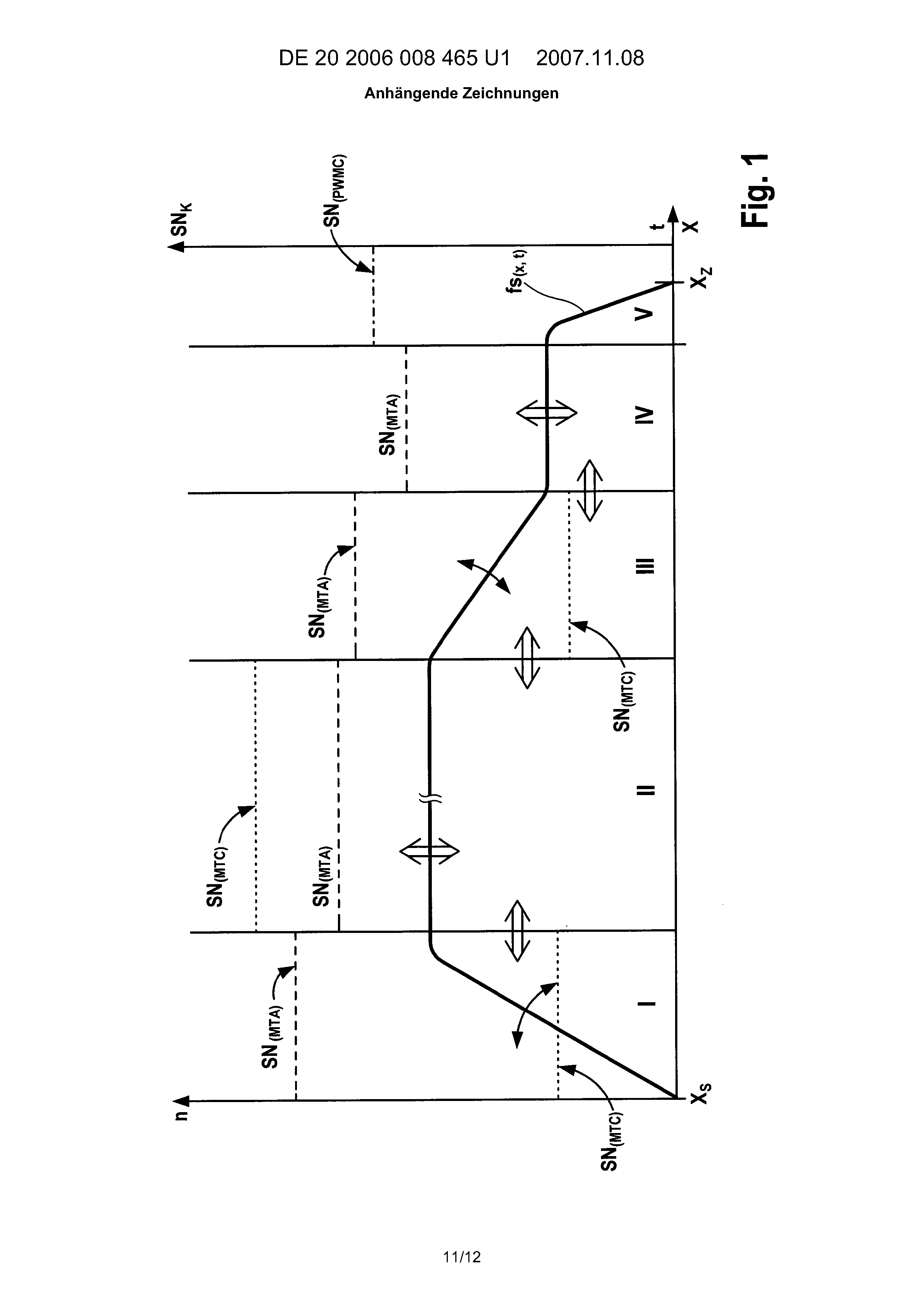
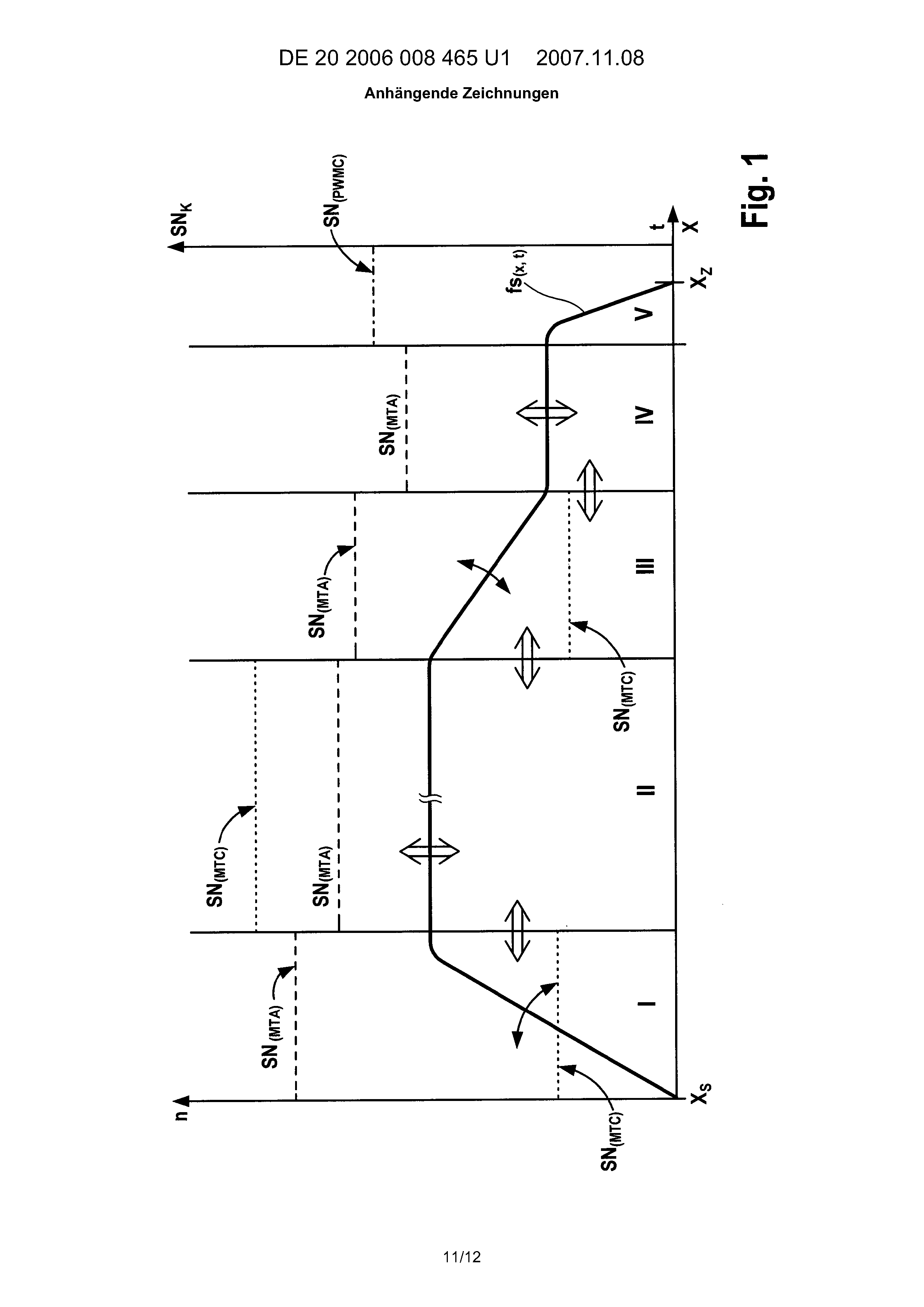
[0038] Fig. 1 ein schematisches Diagramm mit einer Sollfunktion mit mehreren Verstellphasen,
[0039] Fig. 2a ein schematisches Diagramm einer von einem Motor bewirkten Verstellkraft füreinen Schließfall, und
[0040] Fig. 2b ein schematisches Diagramm einer von einem Motor bewirkten Verstellkraft füreinen Einklemmfall.
[0041] Zur Steuerung von Kraftfahrzeugverstelleinrichtung wie beispielsweise Heckklappen oderKofferraumdeckel oder Schiebetüren wird eine elektronische Steuerungsvorrichtung verwendet,die eine Recheneinheit mit weiterer Elektronik, wie beispielsweise Treiber oder Sensoren, zurSteuerung der Funktionen der Verstelleinrichtung aufweist. Die Recheneinheit ist dabei für dieFunktionen beispielsweise mittels einem fest implementierten oder programmierbaren Steuerungsablaufeingerichtet. Dieser Ablauf kann beispielsweise mittels einer Software realisiert werden, die Verfahrensschritterechentechnisch durchführt. Alternativ kann auch eine Digital- und/oder Analogrecheneinheitmit einem Hardware-implementierten Ablauf vorgesehen sein. In dem Ablauf werden Eingangssignale,beispielsweise von Sensoren oder Eingabegeräten ausgewertet. Zur Auswertung werden weiterhinParameter verwendet, die in einem Speicher applikationsspezifisch programmierbar oder aus Messwertenberechenbar sind. In Abhängigkeit von physikalischen Randbedingungen können die Parameter auchempirisch ermittelt werden.
[0042] Fig. 1 zeigt ein schematisches Diagramm, anhand dessen die Funktionalität einer in derRecheneinheit implementierten Regelung näher erläu-tert wird. Die Regelung durch die Recheneinheit soll bewirken, dass die messbare Istgeschwindigkeitdurch eine Steuerung der dem Motor zugeführten Energie einer gewünschten Sollgeschwindigkeitangenähert wird. Hierzu wird beispielsweise ein PI-Regler (Proportional-Integral-Regler) oderein PID-Regler (Proportional-Integral-Differential-Regler) in der Recheneinheit implementiert.Die gewünschte Sollgeschwindigkeit ist dabei verstellpositionsabhängig und/oder verstellzeitabhängig undin Fig. 1 als Sollfunktion fx(x,t) mittels einer durchgezogenen Linie dargestellt.
[0043] Verschiedene Abschnitte der Sollfunktion fx(x,t) sind im Ausführungsbeispiel derFig. 1 fünf Verstellphasen I, II, III, IV und V zugeordnet. Die erste Verstellphase I ist dabeieine Beschleunigungsphase die eine steigende Funktion als Sollfunktion fx(x,t) aufweist.Die zweite Verstellphase II ist eine Gleichlaufphase, die eine konstante Sollgeschwindigkeit alsSollfunktion fx(x,t) aufweist. Die dritte Verstellphase III ist eine Abbremsphase,die eine fallende Funktion als Sollfunktion fx(x,t) aufweist. Die vierte VerstellphaseIV ist eine Langsamlaufphase, die eine konstante Sollgeschwindigkeit als Sollfunktion fx(x,t)aufweist, wobei die Sollgeschwindigkeit in der Langsamlaufphase IV kleiner ist als in der GleichlaufphaseII und beispielsweise nur ein Drittel beträgt. Die fünfte Phase V ist eine Stoppphase, in derein zu verstellendes Verstellteil seine Zielposition erreicht. In dieser Stoppphase V fälltdie Sollfunktion fx(x,t) beispielsweise auf den Wert Null.
[0044] Die Sollfunktion fx(x,t) ist dabei in jeder Verstellphase durch die Recheneinheitdynamisch veränderbar. Diese Veränderbarkeit ist in Fig. 1 durch Pfeile angedeutet. So kannin der ersten Verstellphase I die Steigung einer Rampenfunktion als Sollfunktion fx(x,t)in der Steilheit durch die Recheneinheit verändert werden. Ebenfalls ist es möglich den Verstellwegund damit auch die Dauer der ersten Verstellphase I zu verändern. Analog kann in der drittenVerstellphase III eine negative Steigung einer Rampe als Sollfunktion fx(x,t) und/oder einden Beginn und das Ende der dritten Verstellphase festlegender Verstellweg durch die Recheneinheitverändert werden. In den Verstellphasen II und IV kann jeweils der Absolut- oder Relativwertder Sollgeschwindigkeit und/oder ein der jeweiligen Verstellphase II, IV zugeordneter Verstellweg durchdie Recheneinheit verändert werden. Die Recheneinheit ist daher eingerichtet die Sollfunktion fx(x,t)beliebig auszubilden.
[0045] Dabei ist die Erfindung nicht auf die in Fig. 1 dargestellte Sollfunktion fx(x,t)begrenzt. Die Recheneinheit kann mittels der Ausbildung der Sollfunktion fx(x,t) beliebigephysikalische Einflüsse auf das Verstellsystem berücksichtigen und gegebenenfalls ausgleichen.Im Ausführungsbeispiel der Fig. 1 sind die möglichen Veränderungen der Sollfunktion fx(x,t)von einer Startposition xs und/oder eine Zielposition xz abhängig. Ist beispielsweisedie Zielposition xz eine Verstellposition in der eine Heckklappe geöffnet ist unddie Startposition xs eine Verstellposition in der die Heckklappe geschlossen ist,werden zur Bestimmung der Sollfunktion fx(x,t) die beim Öffnungsvorgang wirkendenäußeren Kräfte, wie die wirkende Gewichtskraft der Heckklappe berücksichtigt. Ist hingegen die Zielpositioneine Verstellposition in der die Heckklappe geschlossen ist und wird die Heckklappe aus einermittleren Verstellposition als Startposition xs in diese Zielposition xzverfahren, wirken andere Kräfte oder Kraftrichtungen im Verstellsystem. Demzufolge ist die Sollfunktion fx(x,t)dann diesen anderen Kräften oder Kraftrichtungen angepasst.
[0046] Ein Vorteil der Anpassung der Sollfunktion fx(x,t) ist, dass mechanische Schwingungenbedämpft werden und für das menschliche Auge nicht mehr wahrnehmbar sind. Mechanische Schwingungenkönnen immer dann auftreten, wenn ein Feder-Masse-System der Mechanik angeregt wird und die mechanischeDämpfung zu gering ist. Ein derartiges System neigt zu Schwingungen, die durch die Anpassungder Sollfunktion fx(x,t) reduziert werden. Weiterhin ist alternativ oder in Kombinationauch eine Veränderung der Sollfunktion fx(x,t) in Abhängigkeit von anderen Systemgrößenmöglich. Beispielsweise wird die Sollfunktion fx(x,t) derart angepasst, dass beieiner niedrigen Versorgungsspannung die Sollgeschwindigkeit in der Gleichlaufphase II reduziertwird, um eine so genannte Regelreserve zu behalten. Entsprechend werden zumindest die VerstellphasenI und III angepasst.
[0047] In einem in Fig. 1 ebenfalls dargestellten Ausführungsbeispiel, das auch mit der Veränderungder Sollfunktion fx(x,t) kombiniert werden kann, ist die Recheneinheit eingerichtetein Einklemmen eines Gegenstandes oder Körperteils während eines Schließvorgangs zu detektieren.Wird beispielsweise die Heckklappe geschlossen, so ermittelt die Recheneinheit aus zumindesteiner Messgröße, wie beispielsweise der Drehzahl n eines Antriebsmotors des Verstellsystems, und/odereiner Regelgröße, wie zum Beispiel das Stellsignal einer Puls-Weiten-Modulation eines Motorstroms, mittelseiner Anzahl von Algorithmen, ob ein Einklemmfall vorliegt. Im Ausführungsbeispiel der Fig. 1werden drei unterschiedliche Algorithmen verwendet. Werden mehrere Sensorsignale ausgewertetkann auch eine höhere Anzahl von Algorithmen vorteilhaft sein.
[0048] Aufgrund eines Zusammenhangs der Algorithmen mit unterschiedlichen physikalischen Effektenim Verstellsystem weisen diese Algorithmen eine unterschiedliche Empfindlichkeit auf, derenEmpfindlichkeit zudem von einer Verstellsituation wie einer Beschleunigung, einer Abbremsungoder einer gleichförmigen Verstellbewegung abhängt.[0049] Aufgrund des Zusammenhangs eines Algorithmus mit einem oder mehreren der physikalischenEffekte weist jeder Algorithmus zudem eine unterschiedliche Selektivität zwischen einer Einklemmkraftund einer Störkraft auf. Um so größer dabei die Fähigkeit eines Algorithmus ist eine Einklemmkraftvon einer Störkraft im Unterschied zu einer Störkraft auszuwerten, um so größer ist seine Selektivität.Demzufolge ist das Verhältnis zwischen Nutzsignal und Störsignal für eine hohe Selektivität besondershoch. In diesem Fall der hohen Selektivität reagiert der Algorithmus sensitiv auf Einklemmereignisse,hingegen unempfindlich gegenüber Störereignissen, wie eine Schwingung des Systems oder ein Auflösungsrauschendes Sensorsignals.
[0050] Eine Selektivität SNK der drei Algorithmen für unterschiedliche VerstellphasenI, II, III, IV oder V ist in der Fig. 1 schematisch dargestellt. Beispielsweise ist in der BeschleunigungsphaseI die Selektivität SN(MTA) eines Algorithmus der Perioden einer Motorumdrehung desAntriebsmotors auswertet höher als die Selektivität SN(MTC) eines Algorithmus, derdie zeitliche Ableitung der Perioden einer Motorumdrehung des Antriebsmotors auswertet. Anhanddieses beispielsweise empirisch ermittelten Selektivitätsunterschieds wird in der VerstellphaseI der Algorithmus, der die zeitliche Ableitung der Perioden einer Motorumdrehung des Antriebsmotorsauswertet, unempfindlicher gesetzt und hierzu beispielsweise einfach deaktiviert. Ein Fehlreversierenaufgrund einer fehlerhaften Detektion durch den Algorithmus, der die zeitliche Ableitung derPerioden einer Motorumdrehung des Antriebsmotors auswertet, wird hierdurch vermieden. Ähnliches giltfür die Verstellphase III, in der ebenfalls der Algorithmus der die zeitliche Ableitung derPerioden einer Motorumdrehung des Antriebsmotors auswertet, eine geringere Selektivität aufweist,so dass dieser in der Abbremsphase III ebenfalls in der Empfindlichkeit reduziert ist, indembeispielsweise Parameter des Algorithmus entsprechend gesetzt werden.
[0051] In der Gleichlaufphase II hingegen weist der Algorithmus, der die zeitliche Ableitungder Perioden einer Motorumdrehung des Antriebsmotors auswertet, eine hinreichend gute Selektivität auf.Zudem weist dieser Algorithmus eine hohe Empfindlichkeit für schnelle Kraftänderungen in einemEinklemmfall auf, so dass dieser Algorithmus nun parallel zum Algorithmus, der Perioden einerMotorumdrehung des Antriebsmotors auswertet, verwendet wird.
[0052] In der Verstellphase V kann aufgrund der teilweise sehr geringen Geschwindigkeit wederder Algorithmus, der Perioden einer Motorumdrehung des Antriebsmotors auswertet, noch der Algorithmus,der die zeitliche Ableitung der Perioden einer Motorumdrehung des Antriebsmotors auswertet,verwendet werden. Hier wird ein dritter Algorithmus verwendet, der anhand der Fig. 2a und Fig. 2bnäher erläutert wird. Die die Motorumdrehung berücksichtigenden Algorithmen werden deaktiviert.
[0053] Die Erfindung ist dabei nicht auf die zuvor genannten Algorithmen oder Sensorsignalebegrenzt. Beispielsweise kann eine Transformationen in den Frequenzbereich als Algorithmus verwendetwerden. Weiterhin wird vorteilhafterweise als Sensorsignal ein Motorstrom, beispielsweise dessendurch mechanische Kommutierung bedingte Welligkeit, zur Detektion eines Einklemmfalles ausgewertet.
[0054] In Fig. 2a ist ein schematisches Diagramm mit einer vom Motor erzeugten Kraft FMund einem Verstellweg x über die Verstellzeit t für ein normales Schließen einer Heckklappegezeigt. Dabei erfolgt eine im linken Bereich des Diagramms dargestellte Verstellbewegung inder eine Verstellposition x sich der Schließposition x0 als Zielposition nähert.Die vom Motor erzeugte Kraft FM ist zum Verstellzeitpunkt td als im Wesentlichenkonstant dargestellt, kann je nach Schwergängigkeit der Verstellung jedoch auch variieren.
[0055] Im Verstellzeitpunkt td beginnt die Heckklappe in eine an der Kraftfahrzeugkarosseriebefestigten Dichtung einzulaufen. Nachfolgend steigt die Kraft FM an, wobei der Kraftanstiegdurch Elastizitäten beispielsweise der Dichtung und durch den Regler beeinflusst ist. Ein Einklemmschutzalgorithmusintegriert die Fläche unter der Kraftkurve. Bevor jedoch ein Integralwert Inta einenIntegralschwellwert überschreitet, wird im Zeitpunkt ta ein Rasten in einer Schlossraste erkannt.Ein Motorstrom wird aufgrund dieses Ereignisses R abgeschaltet und der Integralwert Intaauf Null zurückgesetzt.
[0056] In Abweichung zu Fig. 2a ist in Fig. 2b ein schematisches Diagramm für einen Einklemmfalldargestellt. Wiederum sind der Verstellweg x und die vom Motor erzeugte Kraft FMüber der Verstellzeit t dargestellt. Zum Verstellzeitpunkt tint unterschreitet eine Drehzahldes Motors (in Fig. 2b nicht dargestellt) eine Schwellgeschwindigkeit. Ab diesem Zeitpunkt beginnt derEinklemmschutzalgorithmus die Kraft FM über die Verstellzeit t zu integrieren. DerIntegralschwellwert Intb wird dabei fortlaufend mit dem Integralschwellwert verglichen.
[0057] Da die Heckklappe auf dem eingeklemmten Hindernis aufliegt, kann die Heckklappe nichtin die Dichtung einlaufen. Dieser Einklemmfall führt zu einem erhöhten Kraftanstieg ab dem VerstellzeitpunkttEKF. Zum Verstellzeitpunkt tb überschreitet der Integralwert Intbden Integralschwellwert. Dieses Ereignis A bewirkt, dass der Motorstrom abgeschalten wird. Ebenfalls istes möglich den Motor in die Gegenrichtung zu bestromen, so dass das einklemmte Objekt wiederfrei gegeben wird.[0058] Während der Einklemmschutzalgorithmus integriert, ist die Drehzahl des Motors so niedrig,dass die Drehzahl nicht zur Ermittlung der Motorkraft FM genutzt werden kann. ImEinklemmschutzalgorithmus wird daher ein Stellsignal des Reglers integriert, wobei das Stellsignal- beispielsweise ein Puls-Weiten-Verhältnis - zu der vom Motor erzeugten Kraft FMkorreliert.
mit einem Antrieb zur Verstellung eines Verstellteils,
mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist,
mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs,
mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln,
- zur Regelung die Istgeschwindigkeit und mit einer Sollgeschwindigkeit zu vergleichen,
- die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktion mit einer Anzahl von Verstellphasen mit unterschiedlicher Sollgeschwindigkeit oder mit unterschiedlichem Verlauf der Sollgeschwindigkeit zu bestimmen, und
- die Sollgeschwindigkeit oder den Verlauf der Sollgeschwindigkeit innerhalb mindestens einer Verstellphase in Abhängigkeit von der Startposition und/oder der Zielposition zu bestimmen.
1. Verstellsystem eines Kraftfahrzeugs, insbesondere einer Heckklappe, mit einem Antrieb zur Verstellung eines Verstellteils, mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs, mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln, - zur Regelung die Istgeschwindigkeit und mit einer Sollgeschwindigkeit zu vergleichen, - die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktion miteiner Anzahl von Verstellphasen mit unterschiedlicher Sollgeschwindigkeit oder mit unterschiedlichemVerlauf der Sollgeschwindigkeit zu bestimmen, und - die Sollgeschwindigkeit oder den Verlauf der Sollgeschwindigkeit innerhalb mindestens einerVerstellphase in Abhängigkeit von der Startposition und/oder der Zielposition zu bestimmen.
2. Verstellsystem nach Anspruch 1, bei dem der Verlauf der Sollgeschwindigkeit verstellpositionsabhängigund/oder verstellzeitabhängig ist.
3. Verstellsystem nach einem der vorhergehenden Ansprüche, bei dem die Sollfunktion - eine Beschleunigungsphase, - eine an die Beschleunigungsphase anschließende Gleichlaufphase, - eine an die Gleichlaufphase anschließende Abbremsphase und - eine an die Abbremsphase anschließende Langsamlaufphase aufweist.
4. Verstellsystem nach einem der vorhergehenden Ansprüche, bei dem die Recheneinheit eingerichtetist die Sollfunktion mit einer Ausgleichsphase zu bestimmen, wobei die Recheneinheit eingerichtetist in der Ausgleichsphase eine Änderung einer durch zumindest einen mechanischen Energiespeicherdem Verstellsystem zugeführte oder entzogene Energie im Verlauf der Sollgeschwindigkeit, insbesondere füreine gleichmäßige Istgeschwindigkeit ausgleichend, zu berücksichtigen.
5. Verstellsystem nach einem der vorhergehenden Ansprüche, bei dem die Recheneinheit eingerichtetist die Sollgeschwindigkeit zumindest einer Verstellphase und/oder der Verlauf der Sollgeschwindigkeit zumindesteiner Verstellphase und/oder die Sollfunktion in Abhängigkeit von einer zum Zustand des Verstellsystemskorrelierenden Größe, insbesondere eine aktuelle Temperatur des Verstellsystems, eine Versorgungsspannung, eineVerstelldauer oder eine Sensierung einer Hanglage des Kraftfahrzeugs, zu bestimmen.
6. Verstellsystem eines Kraftfahrzeugs, insbesondere eine Heckklappe, insbesondere nacheinem der vorhergehenden Ansprüchen, mit einer Mechanik mit einem Feder-Masse-System, das zu Schwingen neigt, mit einem Antrieb zur Verstellung eines Verstellteils, mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs, mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln, - zur Regelung eine Istgeschwindigkeit mit einer Sollgeschwindigkeit zu vergleichen, - die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktion miteiner Anzahl von Verstellphasen zu bestimmen, - innerhalb einer Abbremsphase als Verstellphase die Sollfunktion als fallende Funktion hinzu einer Minimalsollgeschwindigkeit (als Teil der Sollfunktion) zu bestimmen, und - die fallende Funktion der Abbremsphase in Abhängigkeit von dem Feder-Masse-Systems und einerSollgeschwindigkeit zu Beginn der Abbremsphase derart zu bestimmen, dass durch die fallende Funktionder Abbremsphase ein Überschwingen des Feder-Masse-Systems derart bedämpft ist, dass vor derZielposition die Istgeschwindigkeit die Minimalgeschwindigkeit erreicht.
7. Verstellsystem nach Anspruch 6, bei dem die Recheneinheit eingerichtet ist die Steilheitder Funktion der Abbremsphase in Abhängigkeit von der Sollgeschwindigkeit zu Beginn der Abbremsphasezu bestimmen, so dass für eine höhere Sollgeschwindigkeit eine Steilheit der Funktion geringerist und für eine geringere Sollgeschwindigkeit eine Steilheit der Funktion höher ist.
8. Verstellsystem nach einem der Ansprüche 6 oder 7, bei dem zumindest eine auf das Feder-Masse-Systemwirkende Kraft verstellpositionsabhängig veränderlich ist, wobei die Recheinheit eingerichtetist die fallende Funktion in der Abbremsphase in Abhängigkeit von zumindest einer Verstellpositiondieser fallenden Funktion zu bestimmen.
9. Verstellsystem eines Kraftfahrzeugs, insbesondere eine Heckklappe, insbesondere nacheinem der vorhergehenden Ansprüchen, mit einer Mechanik mit einem Feder-Masse-System, das zu Schwingen neigt, mit einem Antrieb zur Verstellung eines Verstellteils, mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs, mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln, - zur Regelung eine Istgeschwindigkeit mit einer Sollgeschwindigkeit zu vergleichen, - die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktion miteiner Anzahl von Verstellphasen zu bestimmen, - innerhalb einer Beschleunigungsphase als Verstellphase die Sollfunktion als steigende Funktionhin zu einer Gleichlaufgeschwindigkeit zu bestimmen, - die steigende Funktion der Beschleunigungsphase in Abhängigkeit von dem Feder-Masse-Systems undeiner Sollgeschwindigkeit zu Beginn der Beschleunigungsphase derart zu bestimmen, dass durchdie steigende Funktion der Beschleunigungsphase ein Überschwingen des Feder-Masse-Systems bedämpft ist,so dass vorzugsweise Schwingungen des Verstellteils durch das Auge nicht wahrnehmbar sind.
10. Verstellsystem nach einem der vorhergehenden Ansprüche, bei dem die Recheneinheit eingerichtetist während der Regelung in Abhängigkeit von der Istgeschwindigkeit einen Einklemmfall zu ermitteln.
11. Verstellsystem eines Kraftfahrzeugs, insbesondere eine Heckklappe, insbesondere nacheinem der vorhergehenden Ansprüchen, mit einem Antrieb zur Verstellung eines Verstellteils, mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs, mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln, - zur Regelung eine Istgeschwindigkeit mit einer Sollgeschwindigkeit zu vergleichen, - die Sollgeschwindigkeit von einer Startposition zu einer Zielposition durch eine Sollfunktion miteiner Anzahl von Verstellphasen zu bestimmen, - während der Regelung in Abhängigkeit von einer von der Verstellbewegung abhängigen Messgrößeund/oder einer Regelgröße der Regelung ein Einklemmfall zu ermitteln, wobei - die Recheneinheit zur Ermittlung des Einklemmfalls zumindest zwei Algorithmen aufweist, - die Recheneinheit eingerichtet ist innerhalb zumindest einer Verstellphase einen der zumindestzwei Algorithmen unempfindlicher zu setzen.
12. Verstellsystem nach Anspruch 11, bei dem - die zumindest zwei Algorithmen innerhalb zumindest einer Verstellphase eine unterschiedliche Selektivität zwischeneiner Einklemmkraft und einer Störkraft aufweisen, - die Recheneinheit eingerichtet ist denjenigen der Algorithmen mit der kleineren Selektivitätunempfindlicher im Verhältnis zu dem Algorithmus mit der größeren Selektivität zu setzen.
13. Verstellsystem nach Anspruch 11, bei dem zur Setzung der Unempfindlichkeit die Recheneinheiteingerichtet ist denjenigen Algorithmus mit der kleineren Selektivität innerhalb derjenigenVerstellphase zu deaktivieren.
14. Verstellsystem nach einem der Ansprüche 11 oder 13, bei dem die Recheneinheit eingerichtetist die Selektivität einer der zwei Algorithmen innerhalb einer Verstellphase durch Einstellung einerAnzahl von Parametern zu maximieren.
15. Verstellsystem nach einem der Ansprüche 11 bis 14, bei dem die Recheneinheit eingerichtetist den Algorithmus bezüglich einer Verstellphase unempfindlicher zu setzen.
16. Verstellsystem nach einem der Ansprüche 11 bis 15, bei dem die Recheneinheit eingerichtetist den Algorithmus in Abhängigkeit von zumindest einer Verstellposition unempfindlicher zusetzen.
17. Verstellsystem eines Kraftfahrzeugs, insbesondere eine Heckklappe, insbesondere nacheinem der vorhergehenden Ansprüchen, mit einem Antrieb zur Verstellung eines Verstellteils, mit einem Treiber, der zur Bestromung des Antriebs mit dem Antrieb verbunden ist, mit einem Sensor zur Messung einer Istgeschwindigkeit des Antriebs, mit einer Recheneinheit, die mit dem Treiber und mit dem Sensor verbunden und eingerichtet ist
- eine Verstellbewegung eines Verstellteils zu regeln, - zur Regelung eine Istgeschwindigkeit mit einer Sollgeschwindigkeit zu vergleichen, - die Istgeschwindigkeit wird mit einer Schwellgeschwindigkeit zu vergleichen, - eine Stellgröße der Regelung zu integrieren, wenn die Istgeschwindigkeit die Schwellgeschwindigkeitunterschreitet, wobei die Stellgröße zu einer zum Motor zugeführten Leistung zugeordnet ist,
- den Motor zu stoppen oder eine Verstellrichtung umzukehren, wenn das Integral der Stellgrößeeinen Integralschwellwert überschreitet.
18. Verstellsystem nach Anspruch 17, bei dem die Recheneinheit eingerichtet ist die Schwellgeschwindigkeitin Abhängigkeit von eine zum Zustand des Verstellsystems korrelierenden Größe, insbesondere einerTemperatur, einer Versorgungsspannung, einer Federsteifigkeit einer Verstellmechanik des Verstellsystems oder einer Sollgeschwindigkeit, zuverändern.
19. Verstellsystem nach einem der vorhergehenden Ansprüche, bei dem die Recheneinheit zurBestimmung eines Regelparameters der Regelung in Abhängigkeit von der jeweiligen Verstellphaseund/oder von der Sollgeschwindigkeit und/oder dem Verlauf der Sollgeschwindigkeit eingerichtetist.
20. Verstellsystem nach einem der vorhergehenden Ansprüche, mit einem Positionssensor, dereine Rastung in einer Schlossraste sensiert.
21. Steuerungsvorrichtung zum Betrieb eines Verstellsystems, nach einem der vorhergehendenAnsprüche.