Vehicle detection
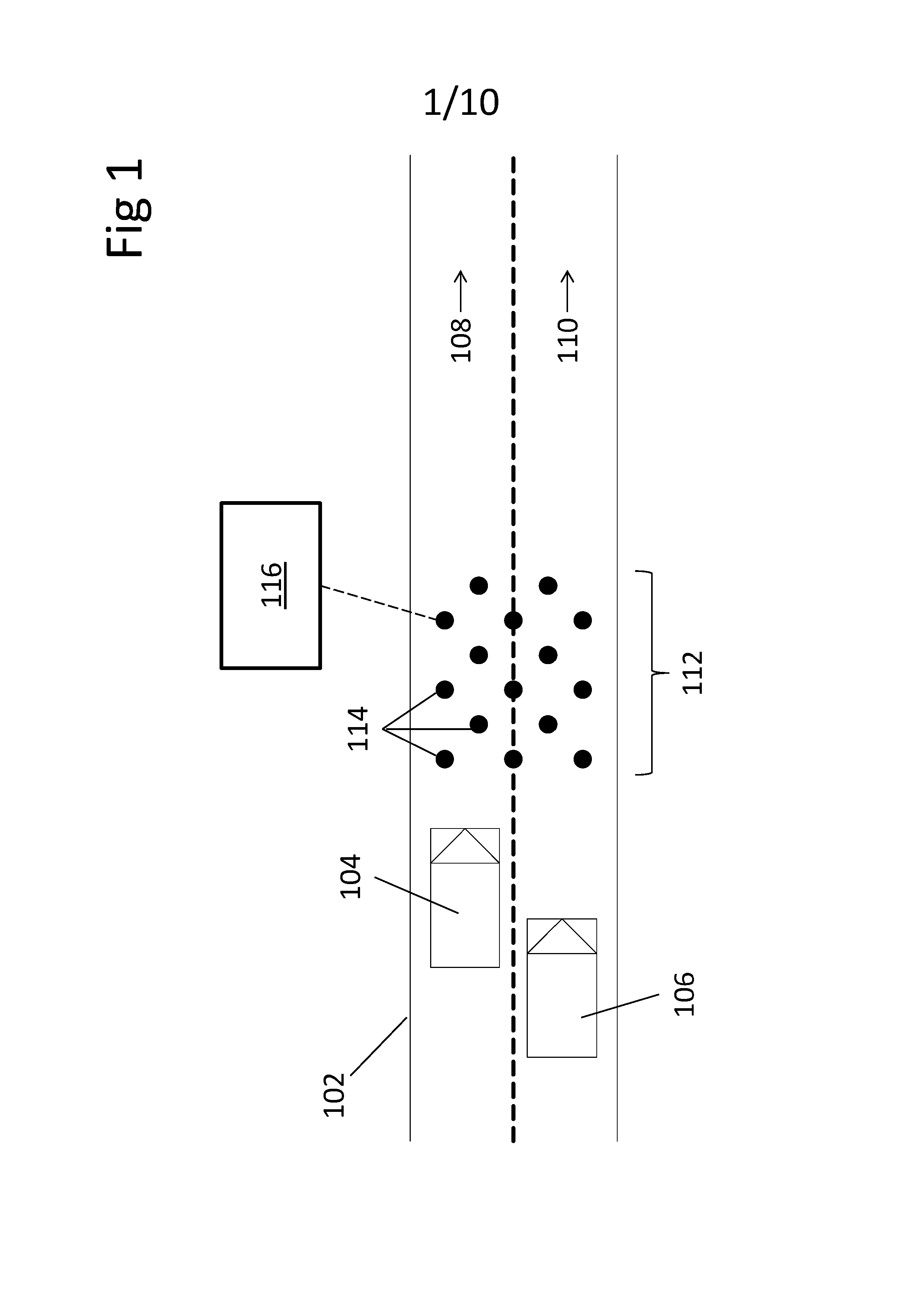
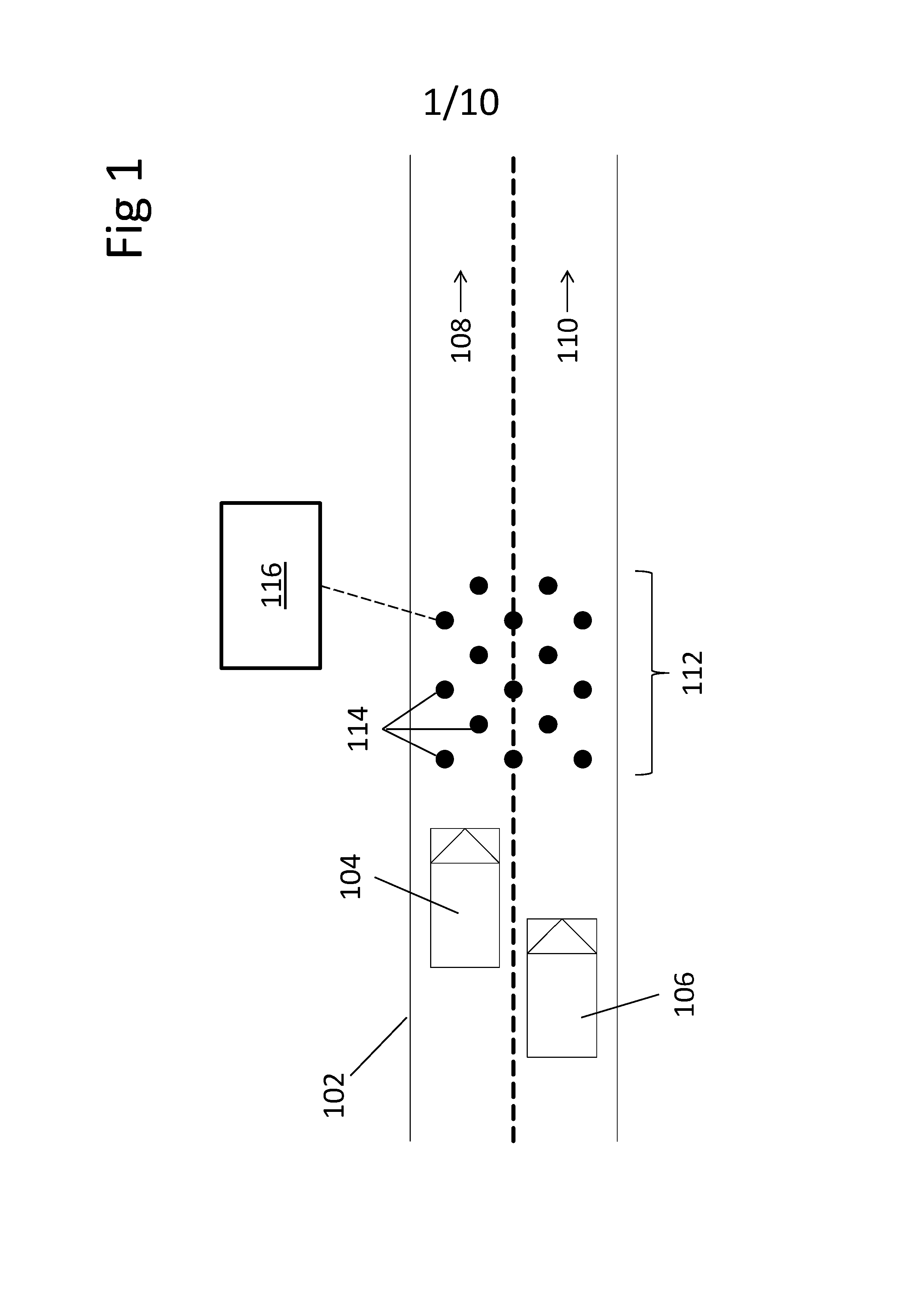
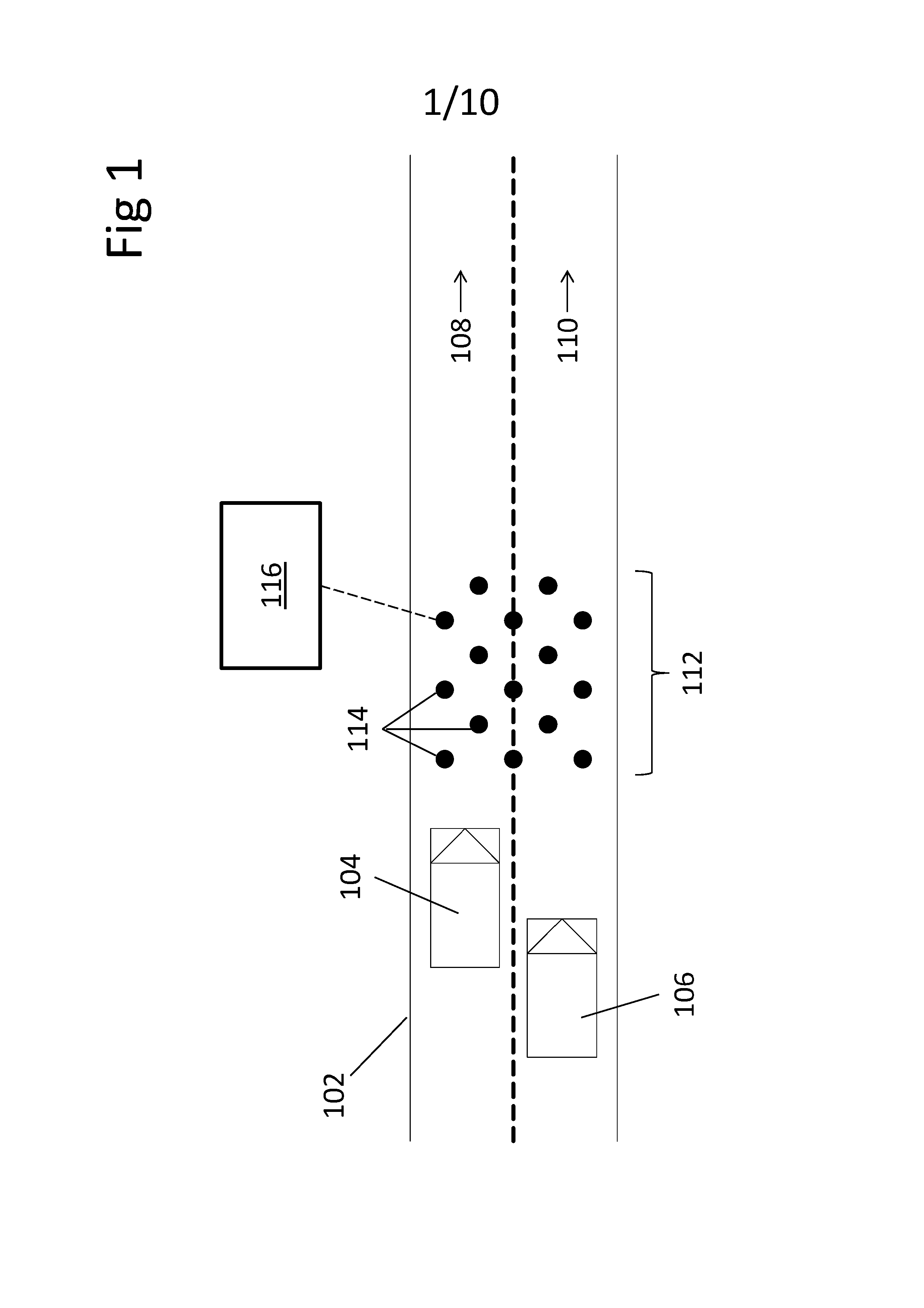
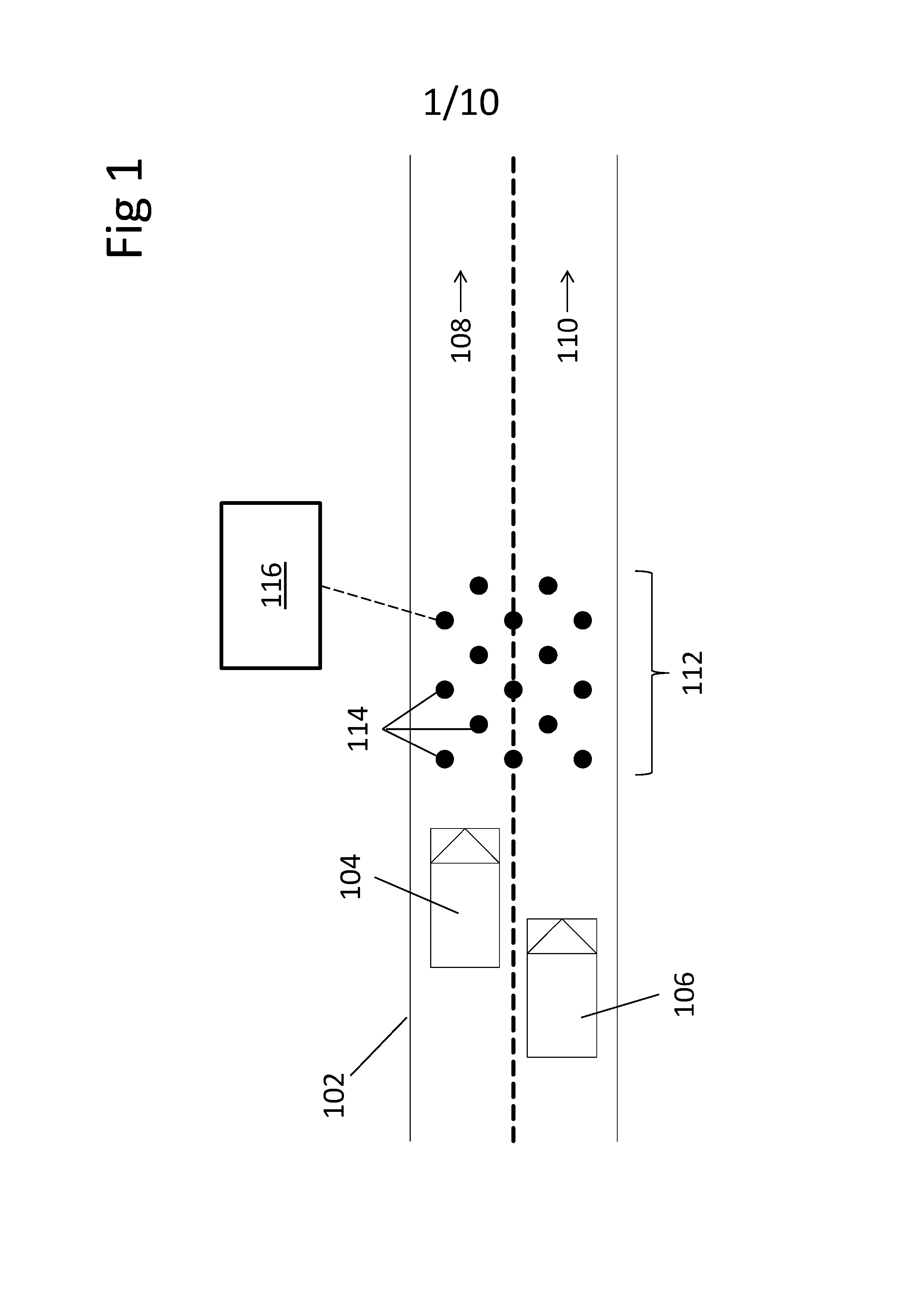
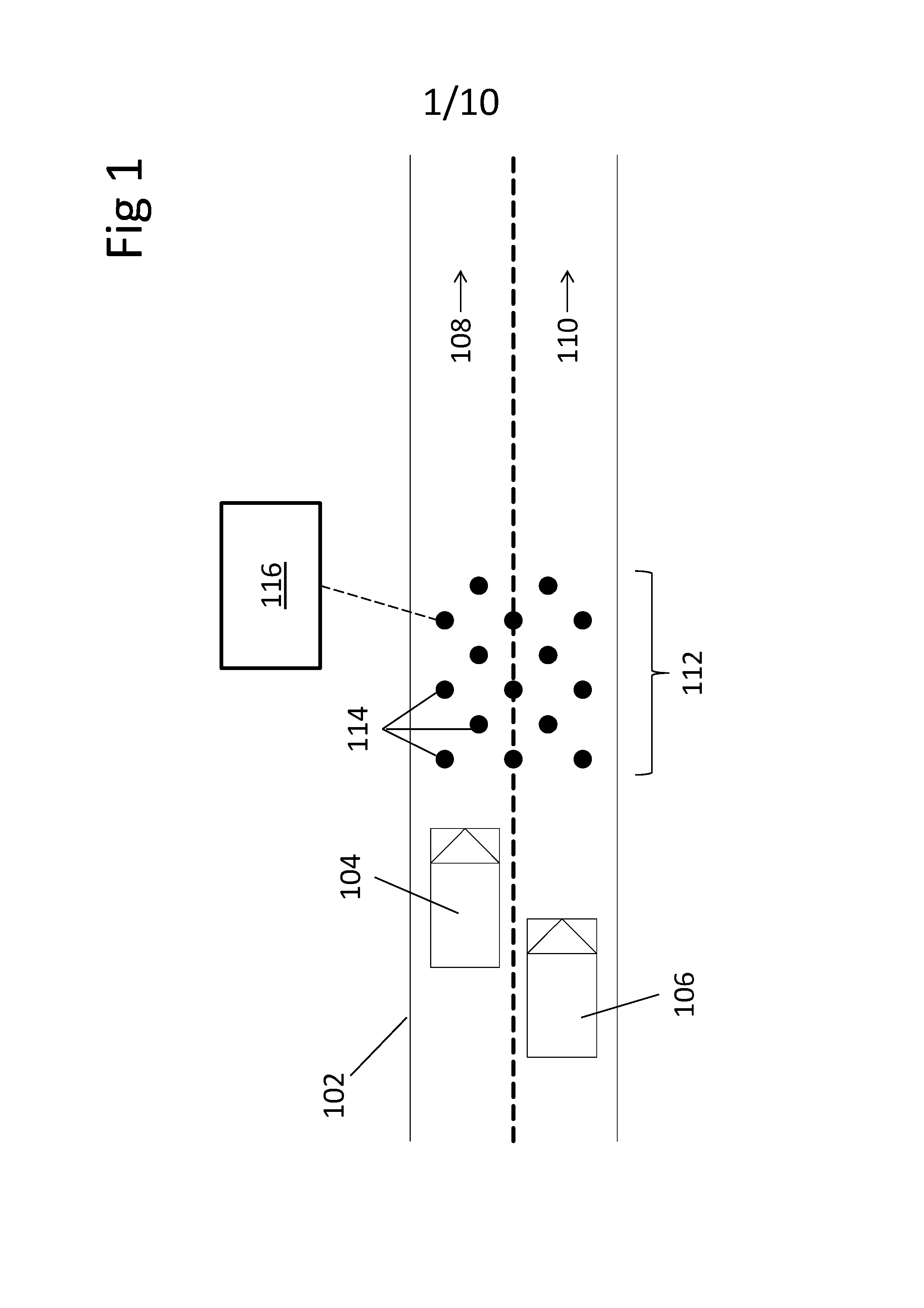
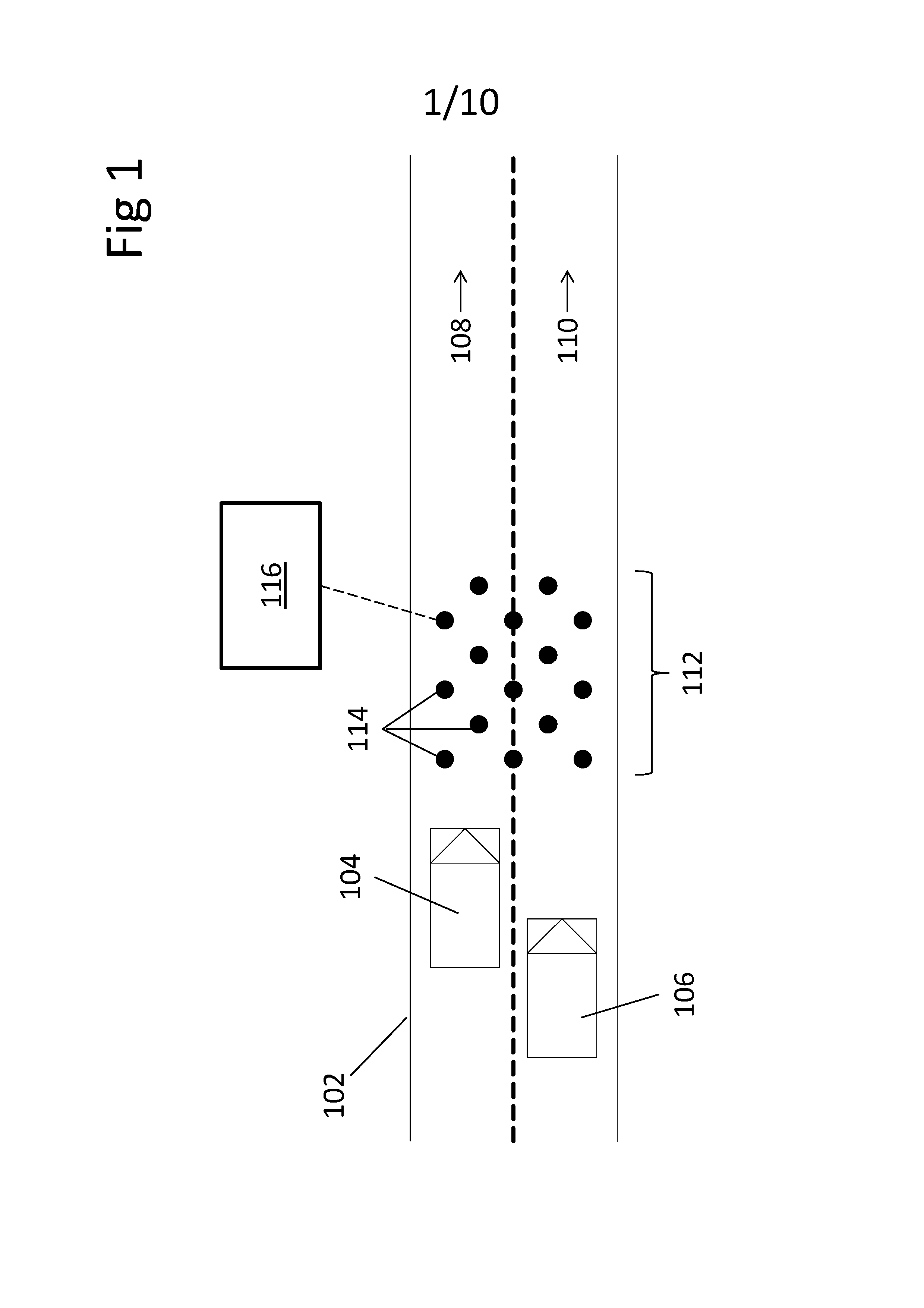
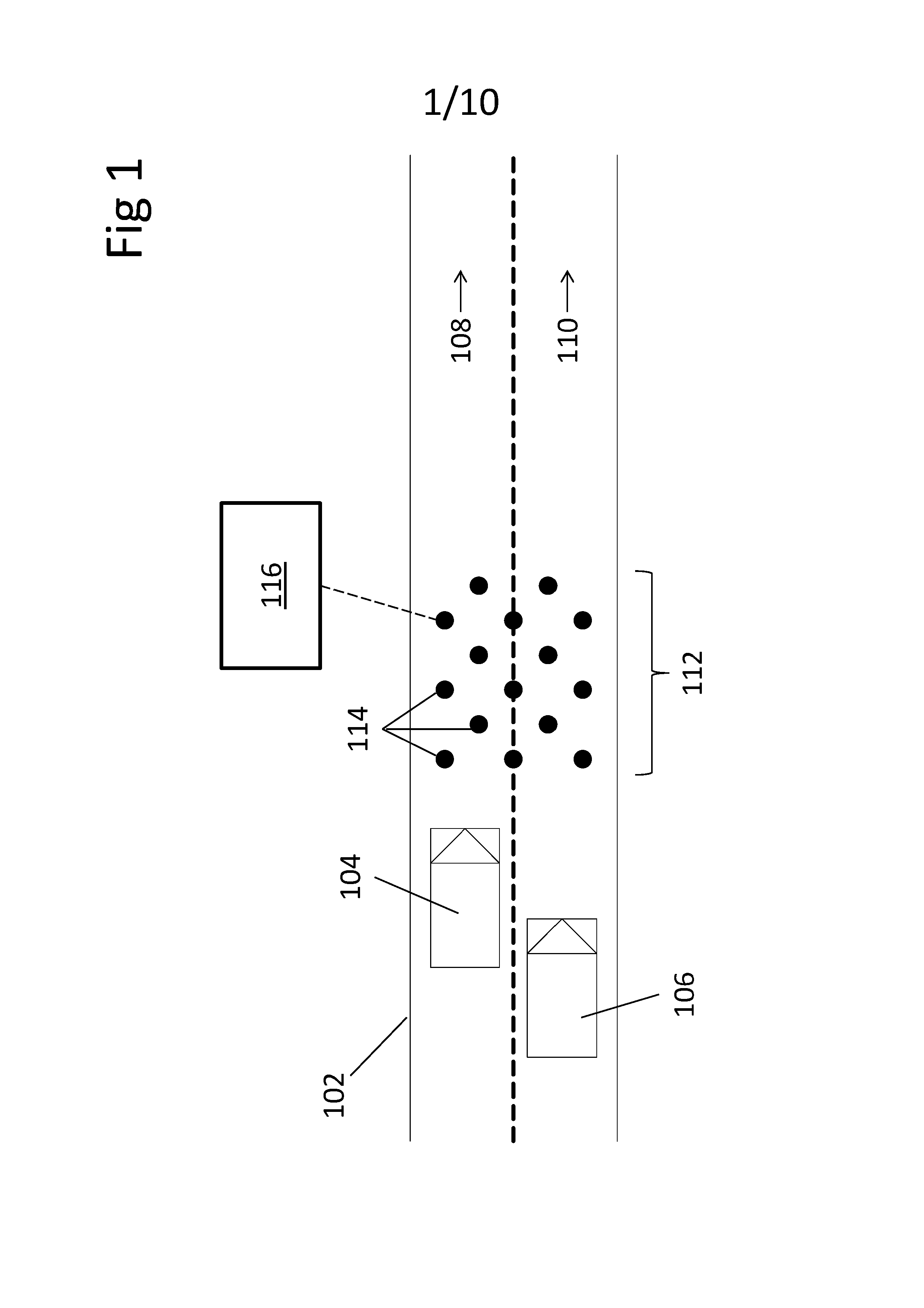
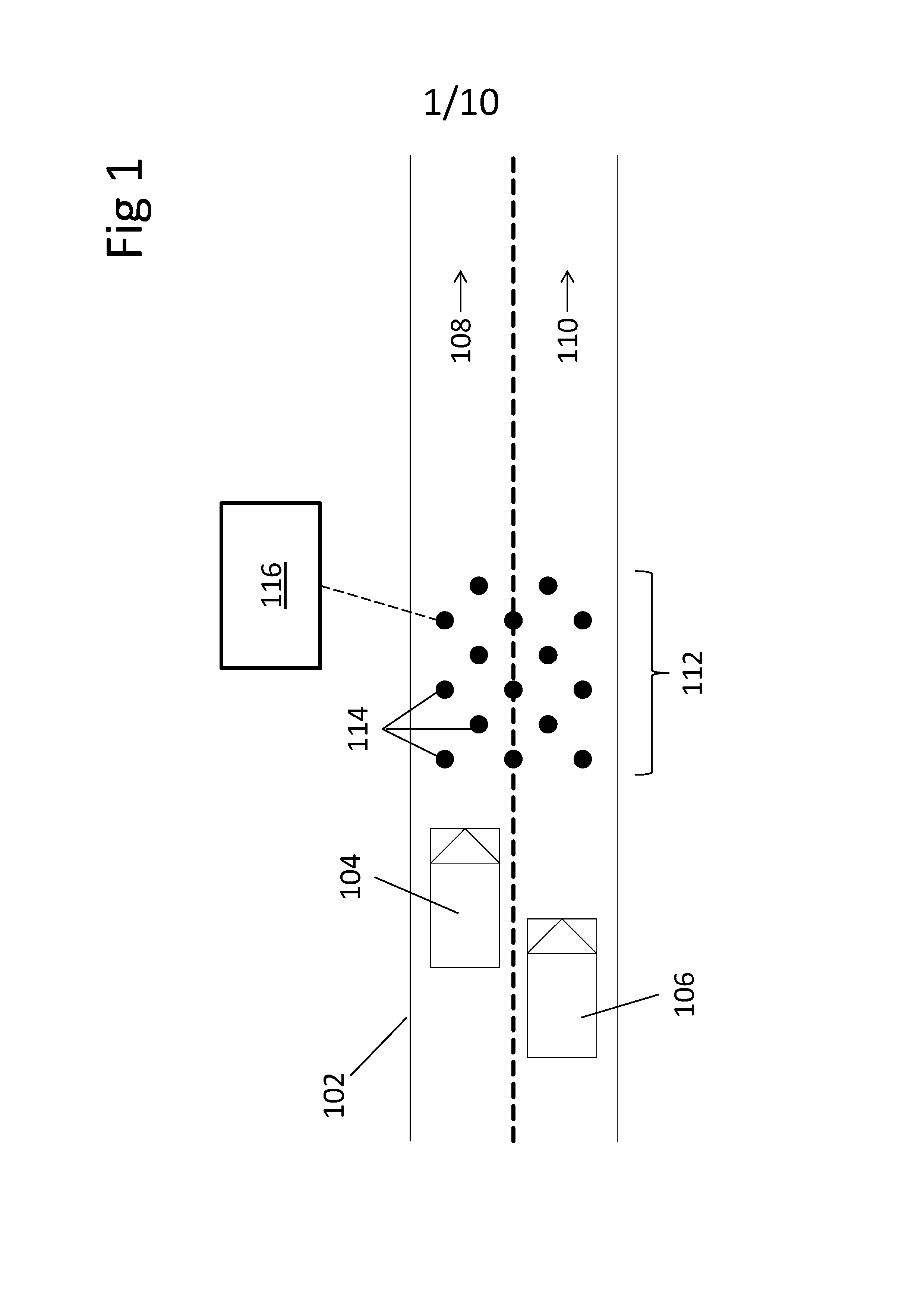
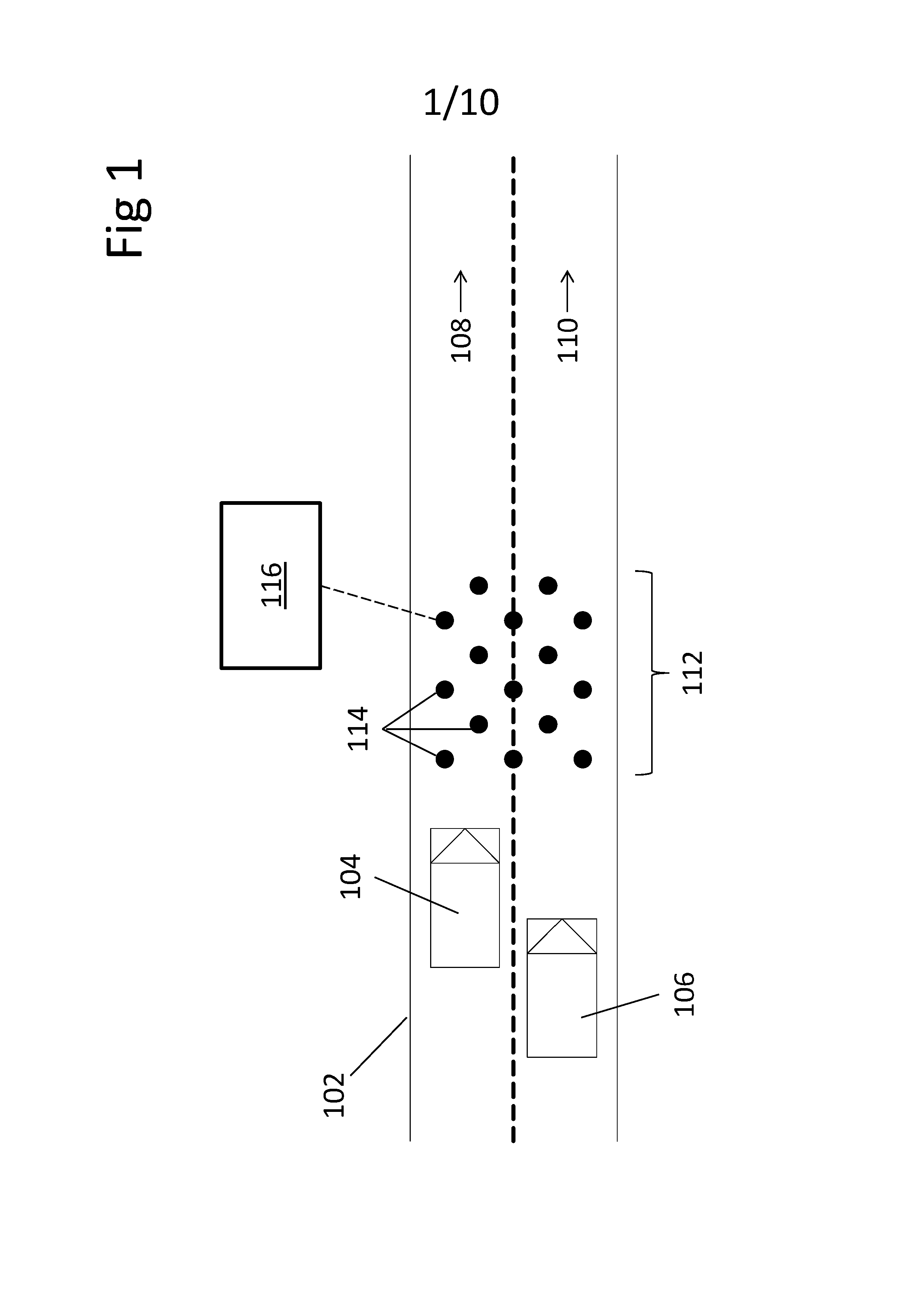
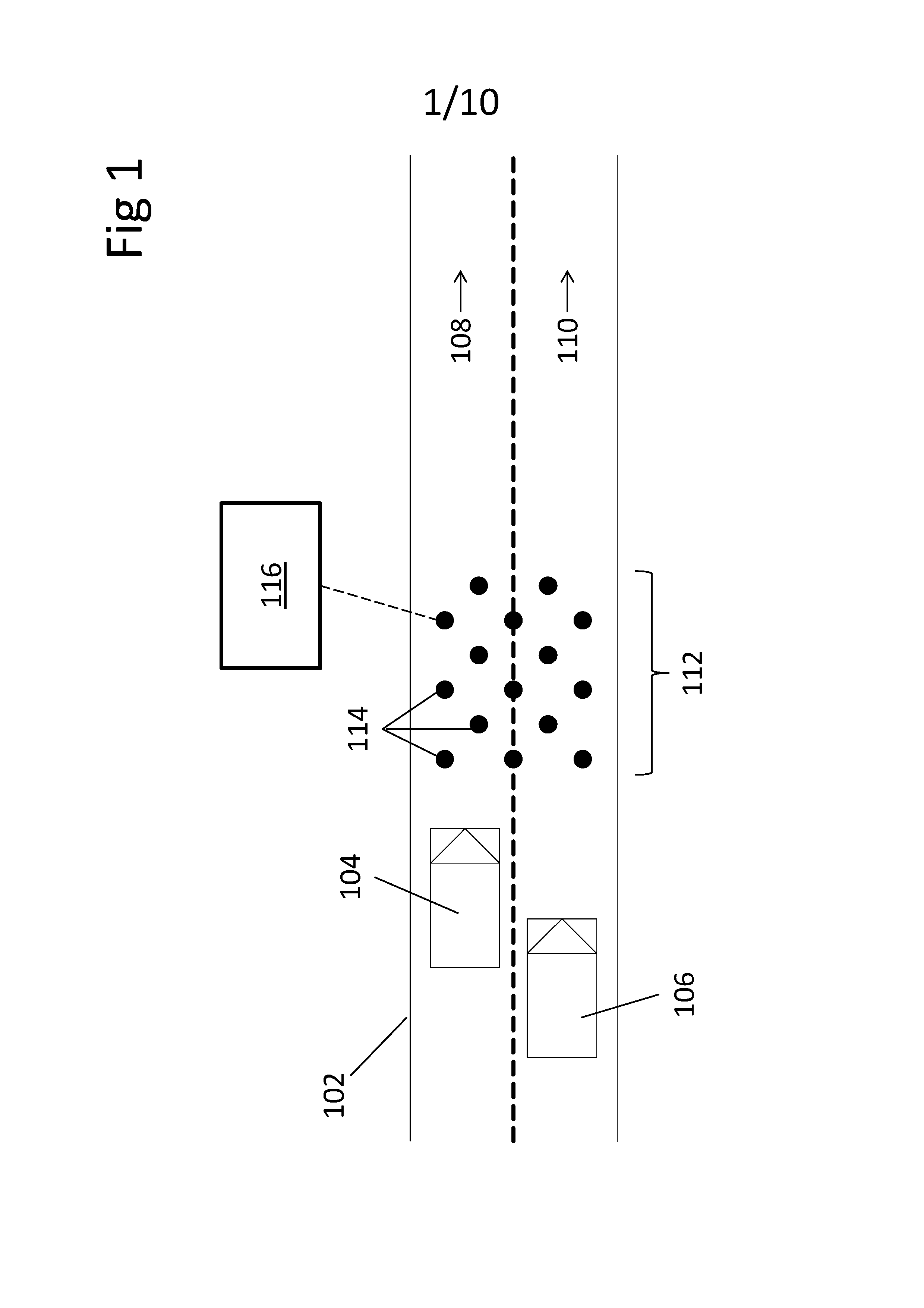
A vehicle sensing system includes an array 112 of sensors 114 such that a sensor spacing is less than a minimum horizontal dimension of a vehicle 104, 106 to be detected whilst the array has a maximum dimension greater than the minimum horizontal dimension of a vehicle to be detected. The sensors, which may be ultra wide-band, are configured to determine the presence or absence of a vehicle and to communicate with a data processing system 116 configured to detect and classify a vehicle on the road based on at least one dimension of the vehicle. The array may be beneath, flush with or above the road surface and the system may determine the length, width, speed or angle of travel (950, fig.9) of the vehicle. Additionally distance to the vehicle or axle usage may be determined. A master sensor may carry out some processing for a local group and may be battery powered.