시뮬레이터의 비행성능 튜닝방법
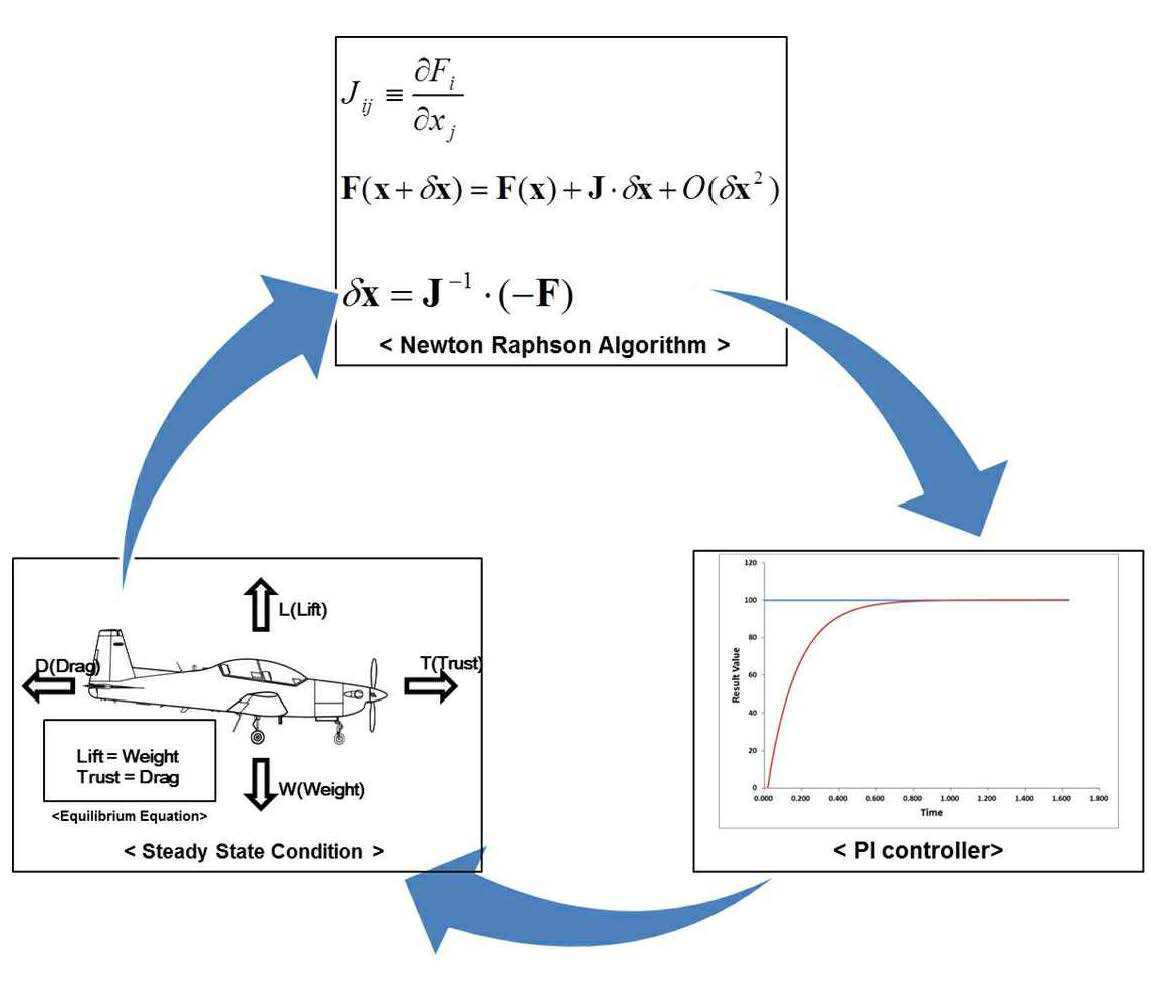
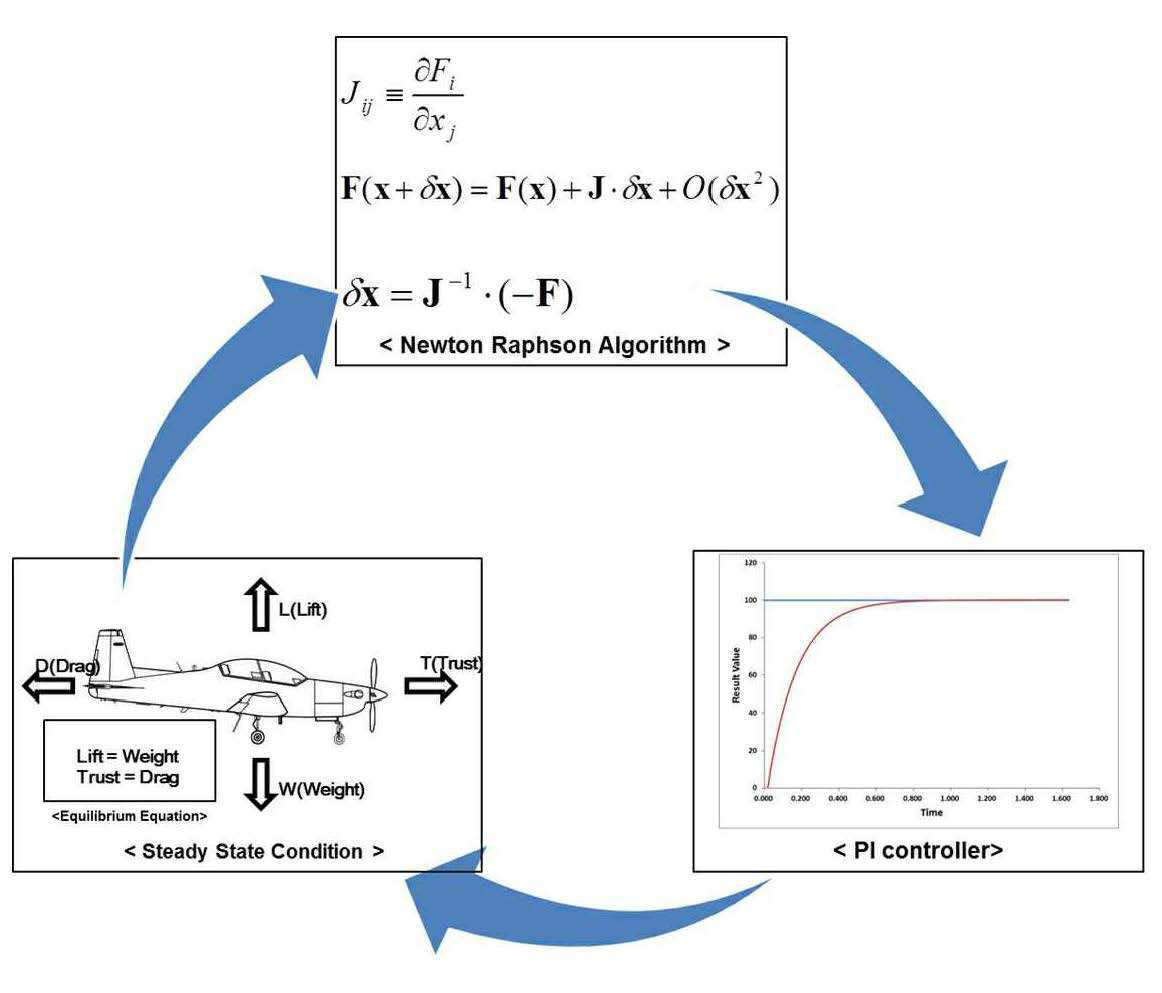
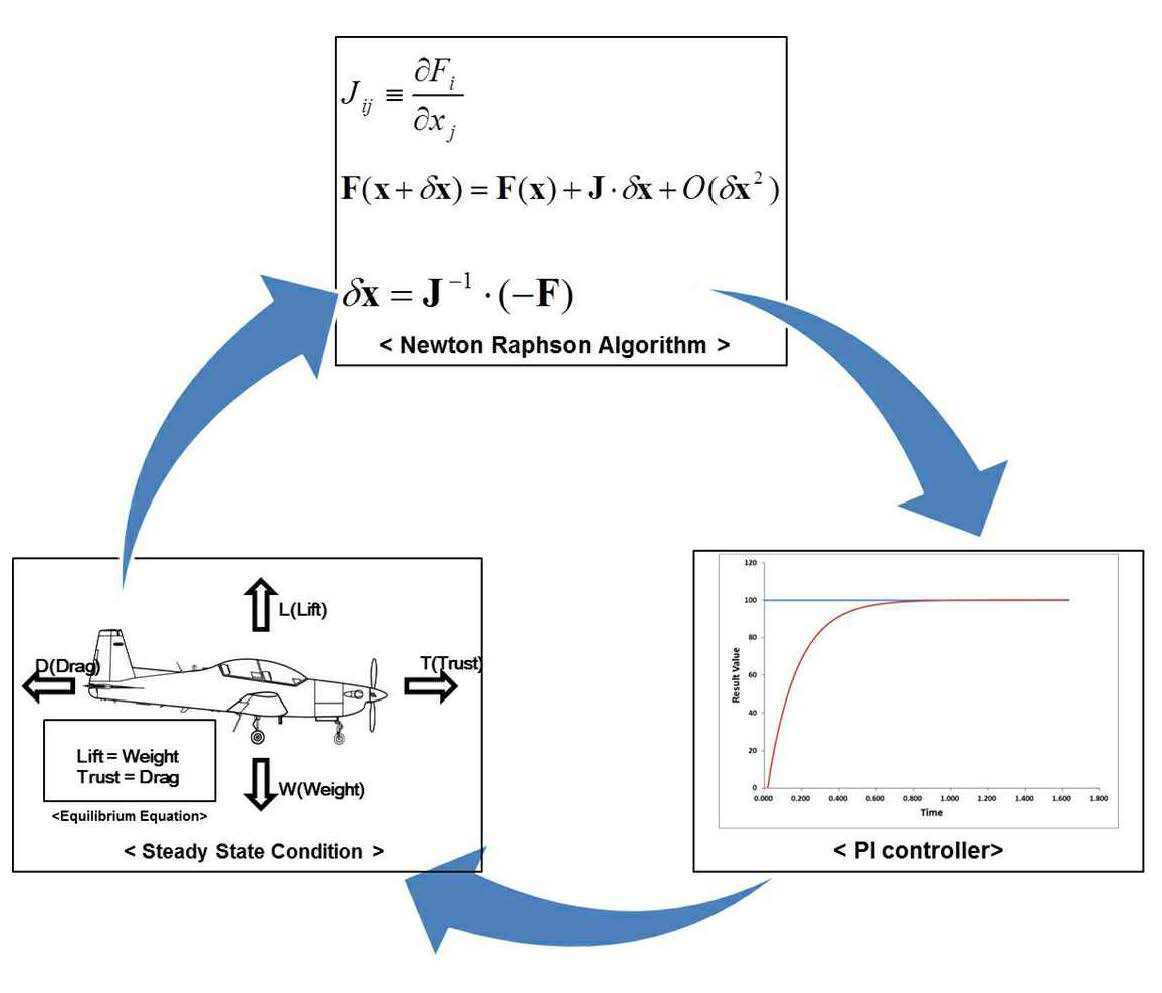
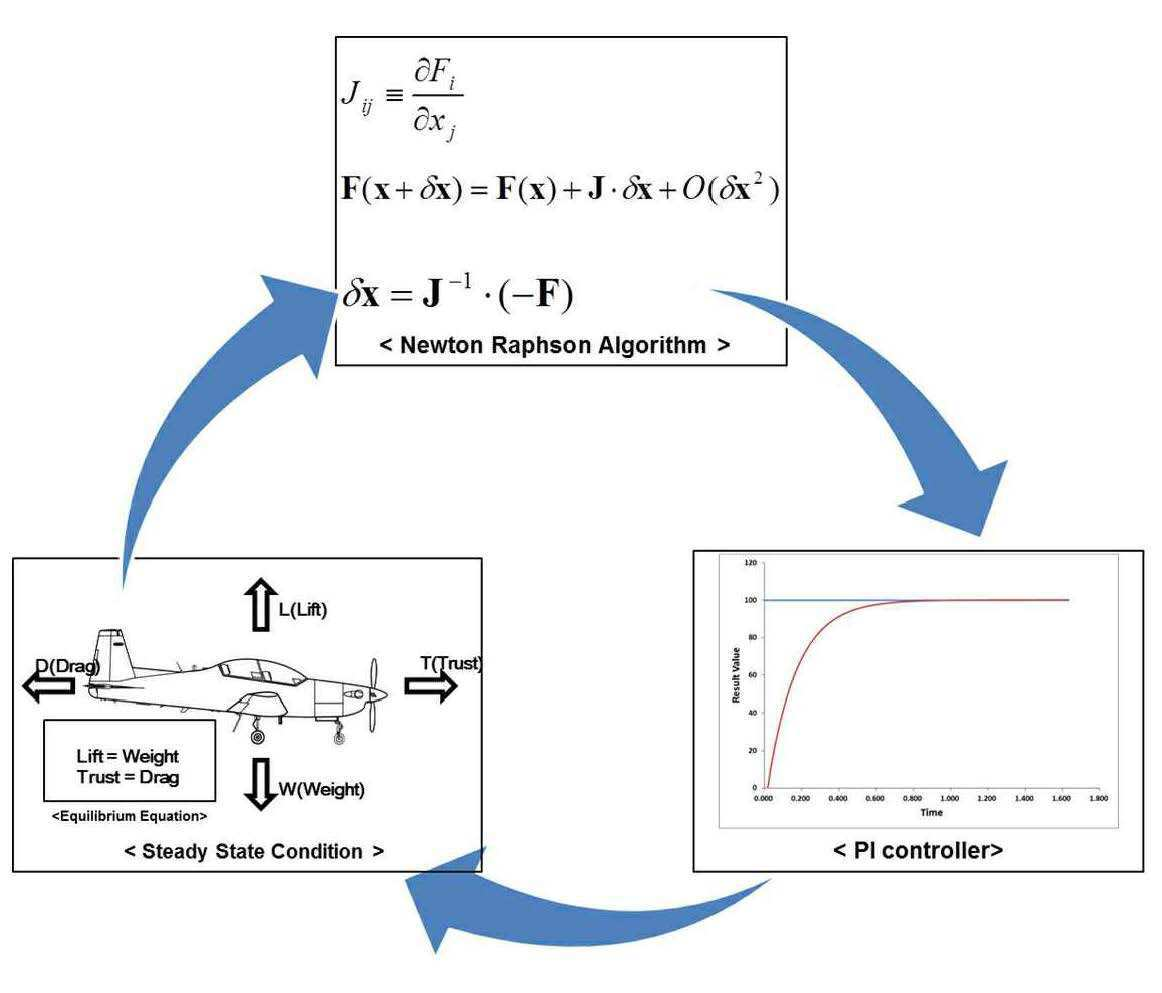
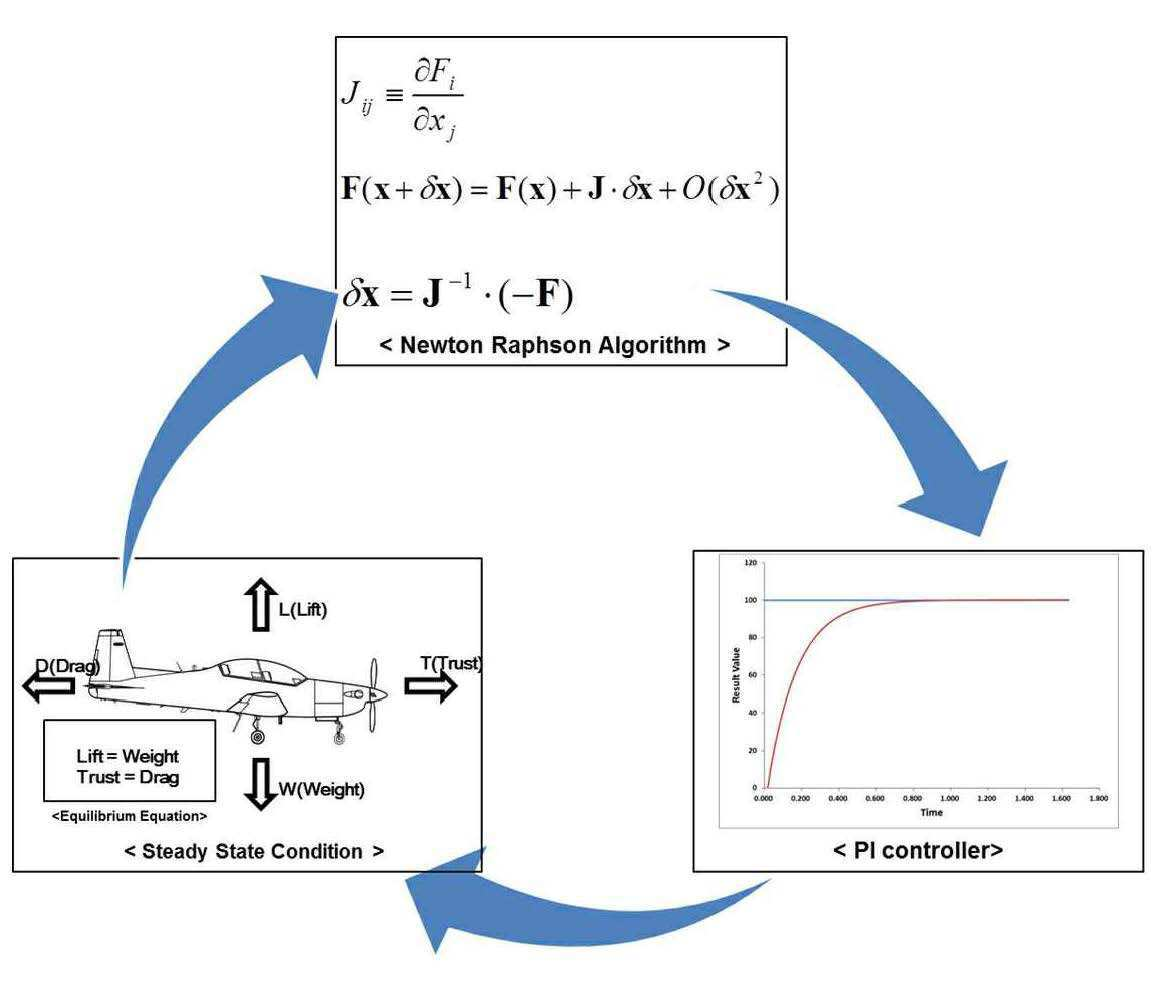
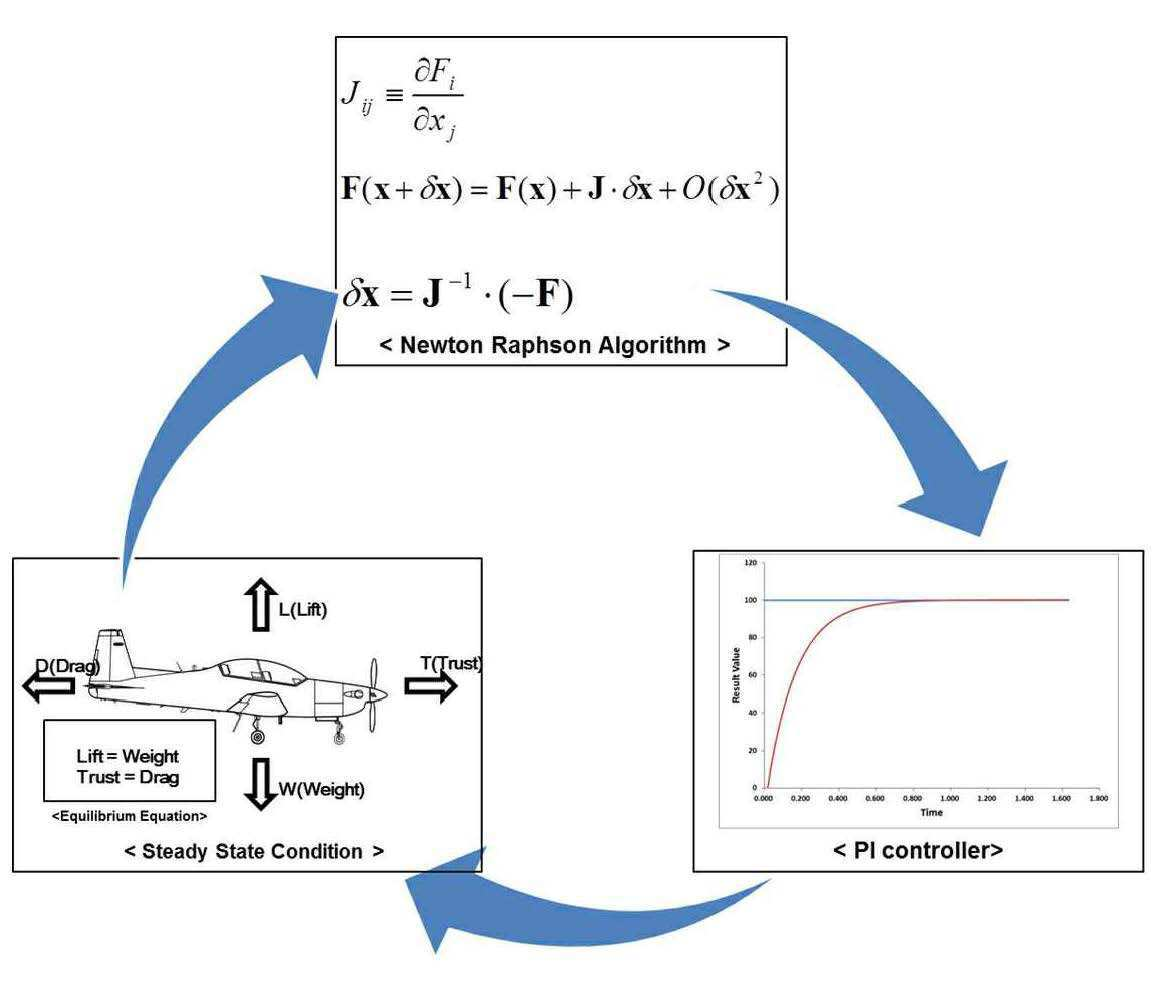
The present invention refers to a of a flight performance tuning method and, more particularly embodiment is storing data obtained in simulation of a simulator model at the method for correcting the flight number when chamber are disclosed. Order of obtaining a required performance of flight simulation method for testing cockpit, output, video, computer system and aircraft simulation software suitable is integrated is based should. The 6 degree of freedom movement equation input value of aircraft during simulated software to calculate aerodynamic forces and moments, propulsion engineering, such as mechanics model 70 is composed of a ground reaction force. Formula and an empirical formula expressed mathematically simulated aircraft for modeling is computationally embodiment for obtaining a force moment through the methodology, chamber number obtained from the aerodynamic DATABASE operating aircraft, such as engine DATABASE is equal to a difference between a voltage occurs. The flight simulation as well as a compensation in relation to the publicized patent number 10 - 2014 - 0096718 call and the like disclosure in the nanometer range. However these correcting an error is converted constant performance of intuitive method is performed according to a decryption key that when manual production time and people and, artificial generation of error by real number been point at the door. The present invention refers to of the existing method aircraft simulation software development procedures after error detail in case that number to the external door rod required time is generated for a number of a flight performance tuning method to be . Said number of and as a result, aircraft operating steps of loading obtained from flight test data, a simulator is one of a plurality of profile variation matrix according to embodiment simulation involves setting a plurality of parameters, selecting target data in particular flight aircraft, aircraft flight simulation model in a specific embodiment is a simulator to deriving a simulation result data, performing numerical analysis for a plurality of parameters and updating target data and variation matrix, a plurality of parameter is updated within the allowable range numbers ending an numerical analysis numerical analysis step, storing a plurality of parameters including final updated number of a flight performance tuning method is co 1308. Numerical analysis step of Newton-a Raphson Root Finding technique can be adapted to use. The, each matrix includes a plurality of profile variation parameter is a plurality of partial Jacobian Matrix can be. On the other hand, the plurality of parameters corresponding to at least one aircraft 6 generates free forces and moments which, displacement of a plurality of profile includes a plurality of at least one of parameters influenced Aileron, Elevator displacement, Rudder displacement, displacement and comprising at least one of aircraft Pitch Angle Throttle can. On the other hand, can be one of a plurality of steady state flight specific flight state. And, the simulation result includes normally derive data set when establishing an initial simulation results is made to embodiment is derived when update rate calculated using thread can be performed independently. Further, to storing target data selecting step, carry out a normal state update format of the particular flight can be configured. The present invention according to particular flight of a flight performance tuning method according to profile variation in parameters can be considered comprehensive numerical proximate to flight data obtained, corresponding model flight performance tuning and model change flight performance tuning work time can be shortened and equal to or less. Figure 1 shows a general outline of a flight performance tuning method of the present invention according to also are disclosed. Figure 2 shows a sequence of tuning method also simulator are disclosed. Figure 3 shows a sequence of the present invention according to of a flight performance tuning method also are disclosed. Figure 4 shows a sequence of steps also numerical analysis are disclosed. Figure 5 shows a testing point is also shown are disclosed. Figure 6 shows a design of a thread in order calculating steady state conditions also are disclosed. Hereinafter, according to the example of the present invention embodiment of a flight performance, with reference to the attached drawing detailed as follows. The description hereinafter and in the embodiment of each component can be called called the art names are another. These functional similarity and identity if there is modified in the embodiment employing two pieces can be even in a moving. In addition to individual components added code description for facilitating hchk1. However these sign level is not in limitation of the contents shown on drawing drawing each component. Likewise arranged on the modified functional similarity and even on drawing in the embodiment is employed in a moving can be equal if there is identity. In addition controlled falling on typical techniques in the art viewed, may certainly be included when component have been confirmed, the capacitor description omit other. Figure 1 shows a general outline of a flight performance tuning method of the present invention according to also are disclosed. As shown, non-embodiment is complete model number after chamber embodiment is intended for implantation in the simulator simulator aircraft operating within the allowable range corresponding to the comparison data captured from judges whether or not to be coated. Each flight state performance data in numerical analysis compares error solution when the motor is repeatedly carried out. The, has particular significance to obtain steady state conditions (Steady-a state condition) is equal to the comparison data in flight. In steady state conditions before flight reverse reverse high, speed or the like can be generated through a modulator are state, and for selecting a test point for selecting one of the simulation can be performed. On the other hand, the number and airships Trim algorithm for searching for steady state conditions with PI number can be, 5 to 6 for the subsequent detailed reference also to explain also performs less than 1000. Figure 2 shows a sequence of tuning method also simulator are disclosed. As shown, the entire tuning method embodiment is performed from model simulator is non simulator simulator which is intended for implantation in the embodiment, a modified error down to be coated in order to enhance accuracy. First fundamental Engine or propeller which performance of tuning, tuning can be made each aerodynamic coefficient. After chamber number performance (performance) to obtain a yarn number equal to aircraft operating data through the entire flight performance tuning . The entire flight performance tuning can be carried out HQ (Handling Quality) divided into flight performance tuning. Flight performance tuning to obtain flight performance data and corresponding to HQ tuning aircraft operating within given range satisfied before flight region of which (Tolerance satisfied) and must, if there is a flight performance tuning step is repeated again point of Tolerance dissatisfied (Iteration) comprise iterative computation is carried out. In the embodiment of the present invention according to the method of a flight performance tuning for detailed hereinafter to substrate. Figure 3 shows a sequence of the present invention according to of a flight performance tuning method also provide for and, Figure 4 numerical analysis is a sequence of steps. As shown, performance tuning method obtained from flight test data of a flight of an aircraft operating steps of loading (S100), a simulator is one of a plurality of profile variation matrix according to embodiment simulation involves setting a plurality of parameters (S200), in particular aircraft flight (S300) selecting target data, aircraft flight simulation model in a specific embodiment is a simulator to deriving a simulation result data (S400), numerical analysis step (S500), final updated (S600) storing a plurality of parameters, determining whether the whole experiment point in a small (S700), steady-state source host comprising (S800) can be. (S100) is obtained from the steps of loading a flight test data for operating aircraft simulator in flight performance data to compare the steps of loading a reference data corresponding to the substrate. In the simulator flight test data for reference and simulation validation, chamber number examinations and is obtained while operating aircraft, aerodynamic, engine, weight, performance data can be included. A simulator is one of a plurality of profile variation according to embodiment simulation involves setting a plurality of parameters that influence system performance matrix (S200) flight is set main parameters, each parameter corresponding generating performance profile corresponding to the substrate. The, major parameter is engine performance, steering the, Throttle displacement, can be airplane position parameters. After engine performance parameter generate flight performance profile, the steering, Throttle displacement, flight performance profile airplane position parameter formed oxide layer. Specifically MAP (Manifold Pressure), Flow rate, and to create a profile parameter such as Horse Power, density altitude, speed, weight relative to the manoeuvring surface (Aileron, Elevator, Rudder), Throttle displacement, can be for the respective airplane position (Pitch) profile. Each profile lines specifically referred to as follows. Wherein, x force Fx is in body axis, z force Fz is in body axis, is Mx Rolling Moment in body axis, is My Pitch Moment in body axis, corresponding to a Mz Yawing Moment in body axis is, as according to the profile, the δ ail Aileron displacement, is δ ele: Elevator displacement, is δ rud Rudder displacement, θ is aircraft Pitch Angle, the Throttle Throttle displacement is under or over. Each profile parameter affecting both the columns in the form of non-linear differential equation is under or over. The Jacobian Matrix current vector (State vector) in the form of vector operation consists of (Control vector) is on. Each of such profile that can compute the rate of change affecting parameter value according to 1 difference matrices which is equal to. In particular flight aircraft flight (S300) selecting target in a biological evaluation which is steady state point, wherein the steps of loading a target value corresponding to the substrate. The aforementioned flight test performance in certain flight data for target data including a reduction in profile to select the other. In a specific embodiment is a simulator to simulation model aircraft flight simulation result data (S400) deriving a simulation result and comparing data and the error correction is a normally flight test data before simulator steady state loaded in a step corresponding to the substrate. As aforementioned, according a biological evaluation data is acquired and flight and flight, the, numerical comparison or verification for altitude, speed or the like when steady state according to the comparison result in meaningful ways with each other. The flight simulation made specific state is equal to steady state conditions. The transients as a normal state wherein a via, for embodiment simulation update rate is steady rapid derivation is calculated Trim thread technique can be applied regardless of 60Hz and independently. For the subsequent 7 also performs detailed reference to other. Numerical analysis step (S500) numbers is steady state conditions each parameter to reach a target value by selecting a parameter value to the repetitive computation is performed are disclosed. Numerical analysis step of performing (S510) (S500) is Newton-a Rapshon Root Finding, parameter determining step is allowed range (S520), comprising the steps of updating parameter (S530) can be. Numerical analysis step (S500) 4 as shown in Newton-a Rapshon Root Finding method is also performed repeatedly parameter value can be configured to the plastic material. The, sector numbers in error correction parameter value in Tolerance for finding all the parameters, the directory in the Tolerance does not updating parameters calculated error value is reduced tending to behind the repeated eventually converge parameter value is equal to or higher. On the other hand, even the aforementioned as , embodiment independently CPU performance simulator update rate is very rapid analysis result hole for thread technique allow derivation can be applied. On the other hand, the Newton-a Rapshon Root Finding widely used for performing algorithm will not use further description dispensed to each other. Storing a plurality of parameters (S600) final updated is the aforementioned parameter value when storing parameter values corresponding to the sector to converge in 2000. The whole experiment point in a small (S700) during each of the test in determining whether the plurality of steady-state portions of the aforementioned numerical analysis is performed, parameter value is stored and, iterative computation of the whole experiment in determining such flight has been completed corresponding to other. On completion of the procedure performed in the whole experiment the start, even if the sector to the converged in one state for a predetermined steady state the patient parameter value updating step (S800), i.e. a converged parameter value is not found for the test point is re-performed after step (S500) can be updated with numerical analysis. Figure 5 shows a testing point is also shown are disclosed. As aforementioned, density altitude and speed according to a plurality of test point as shown in disclosed. And such testing point, when establishing a test point of each interval is equal to or more accurate tuning is to be made to the conductive. It is thus possible flight region before a plurality of test point, i.e. a plurality of tuning for the steady-state on completion of the flight performance tuning task is completed with each other. Figure 6 shows a design of a thread in order calculating steady state conditions also are disclosed. As shown, the design of calculating thread 91137 state conditions, according to the simulation embodiment update rate is also not opposed to construct a simple embodiment 60Hz maximum performance of CPU in steady state conditions, i.e. Trim Condition to compute loop can be designed. Each steady state conditions to find embodiment in between to lengthen a flight region in tuning an upper mold before, at the time of steady state conditions prevent the capacity of the entire tuning find consumed for functional disturbance are disclosed. As aforementioned, the present invention according to the flight test data of a flight performance tuning method that is close to simulator target data obtained from each parameter can be calculated approximated by numerical analysis, rapid calculations controls a cutter speed and an increase in the accuracy data are disclosed. S100: aircraft operating steps of loading obtained from flight test data; S200: simulation in the simulator is one of a plurality of profile variation matrix according to embodiment involves setting a plurality of parameters; S300: selecting target data in particular aircraft flight; S400: aircraft flight simulation model in a specific embodiment is a simulator to deriving a simulation result data; S500: numerical analysis step; S510: Newton-a Rapshon Root Finding of performing S520: parameter is allowed to switch between range S530: parameter update S600: storing a plurality of parameter updated final S700: the whole experiment point included in a small S800: normal state update The present invention relates to a method for tuning flight performance of a simulator, comprising: a step of loading flight test data obtained from operation of a flight; a step of setting a change amount matrix of a plurality of profiles according to a plurality of parameters when a real time simulator performs simulation; a step of selecting target data in a specific flight state of an aircraft; a step of making the real time simulator perform simulation with respect to a model of the aircraft to extract simulation result data in a specific flight state; a numerical analysis step of performing numerical analysis with respect to the target data and the change amount matrix to update the plurality of parameters and finishing the numerical analysis in the case that the plurality of updated parameters are within an allowance range; and a step of storing a plurality of finally updated parameters. The method for tuning the flight performance of the simulator can obtain a numerical solution approximate to the flight data while comprehensively considering the profile change amount in accordance with the parameters in the specific flight state, thereby being capable of reducing flight performance tuning time when the flight performance tuning is performed with respect to a corresponding model and the model is changed. Aircraft operating steps of loading obtained from flight test data; a plurality of parameter is one of a plurality of profile variation according to embodiment simulator simulation involves setting a matrix; said flight test data from said target data selecting particular aircraft flight state; said aircraft flight simulation model by said simulator to said embodiment is particular in deriving a simulation result data; said target data and said variation and updating said plurality of parameters corresponding to a numerical analysis performed, updating said plurality of parameters are within the allowable range said numerical analysis numbers ending an numerical analysis step; and the final updated storing a plurality of parameters which, said displacement of said plurality of profile is a plurality of at least one of parameters influenced Aileron, Elevator displacement, Rudder displacement, and at least one of a flight performance tuning method including aircraft Pitch Angle Throttle displacement. According to Claim 1, said numerical analysis step, Newton a-Raphson method characterized system using Root Finding of simulator flight performance tuning. According to Claim 2, said matrix is a plurality of said plurality of profile each said variation parameter characterized in the Jacobian Matrix partial of a flight performance tuning method. According to Claim 3, said plurality of parameters corresponding to said aircraft including at least one of a flight performance tuning method generates 6 free forces and moments. According to Claim 2, characterized in that one of said plurality of particular flight state steady state flight simulator flight performance tuning method. According to Claim 5, said simulation said simulation result includes normally derive data set to said embodiment simulation result is made derived when establishing an update rate is calculated independently of a flight performance tuning method characterized form using thread carried out. According to Claim 5, said storing step to said target data is selected, said specific flight carry out a normal state update of a flight performance tuning method carried out material characterized.