Rock mass deformation amount and deformation trend description method based on three-dimensional laser scanning point cloud data
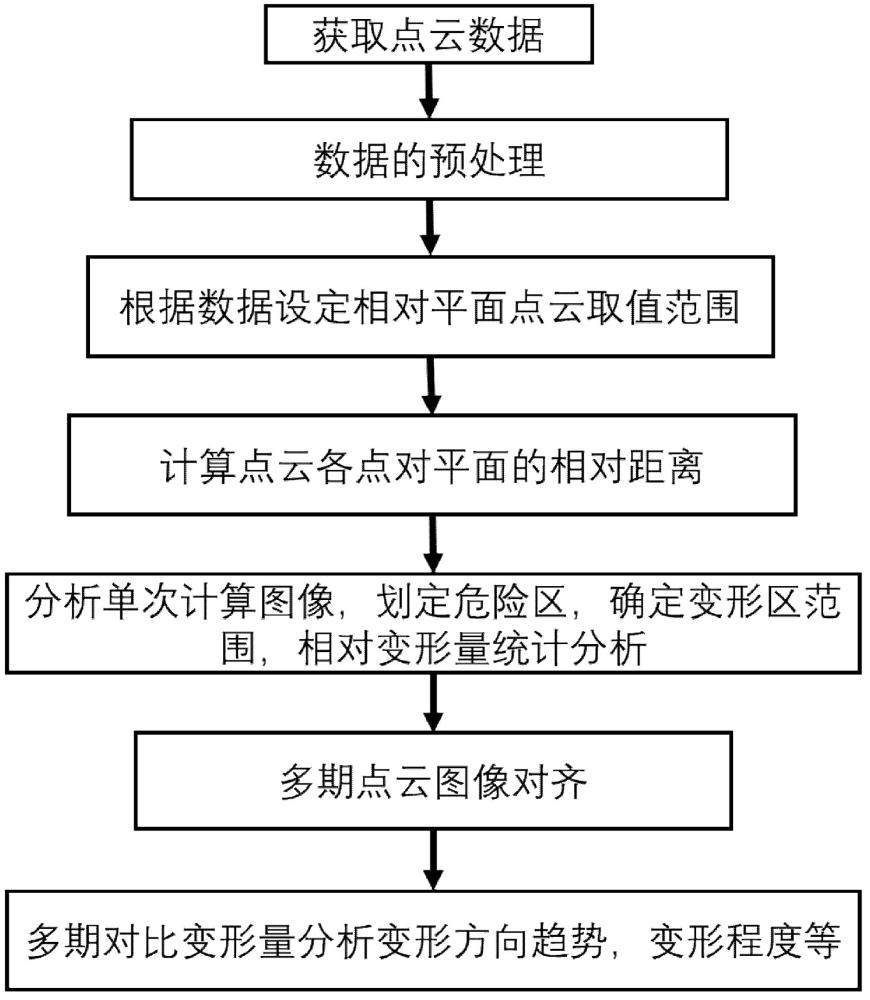
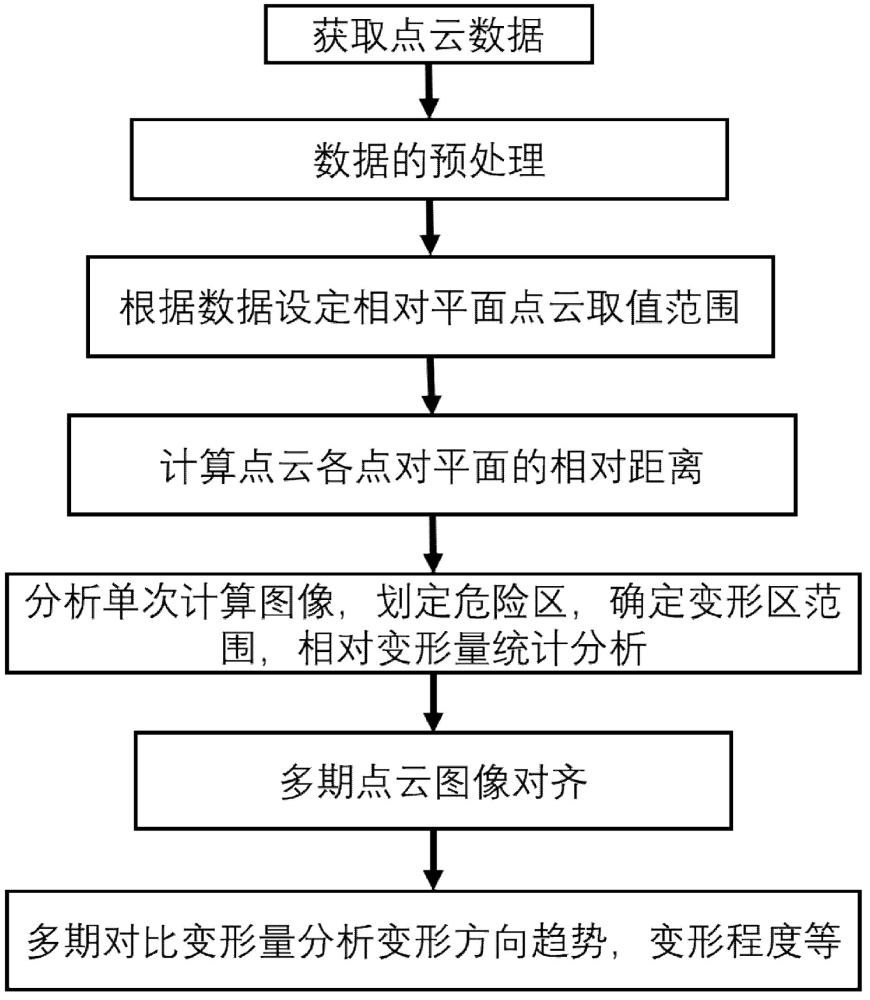
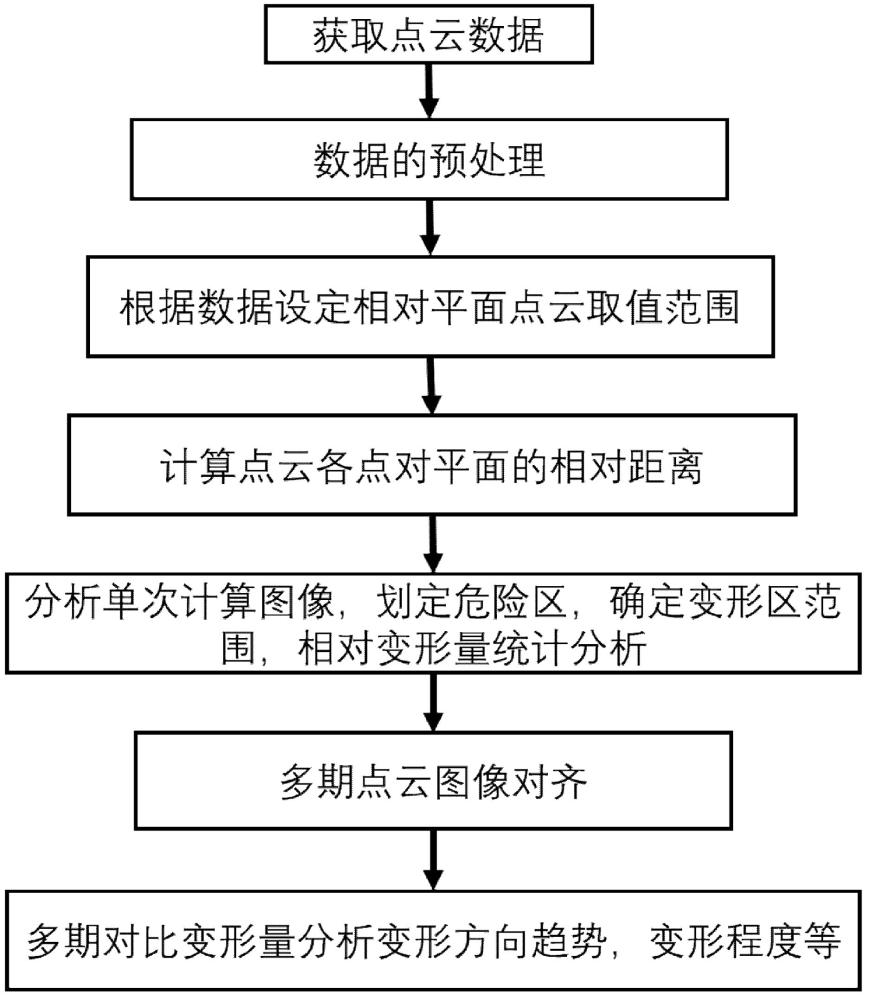
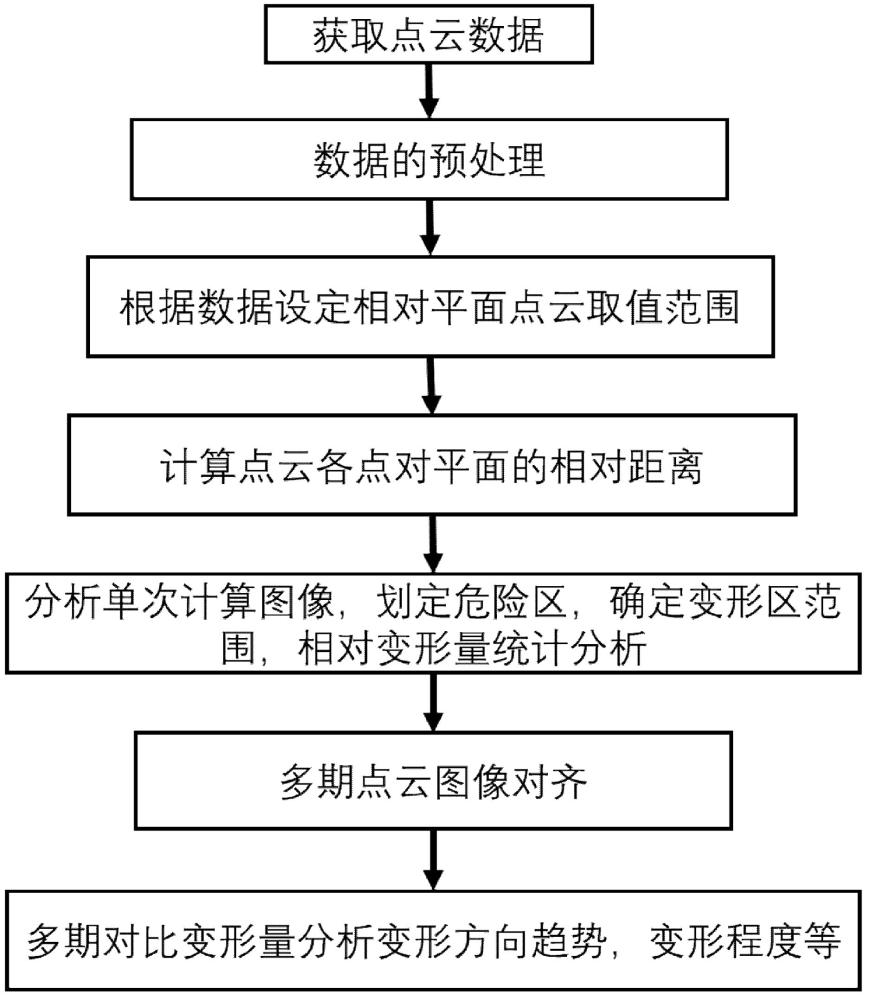
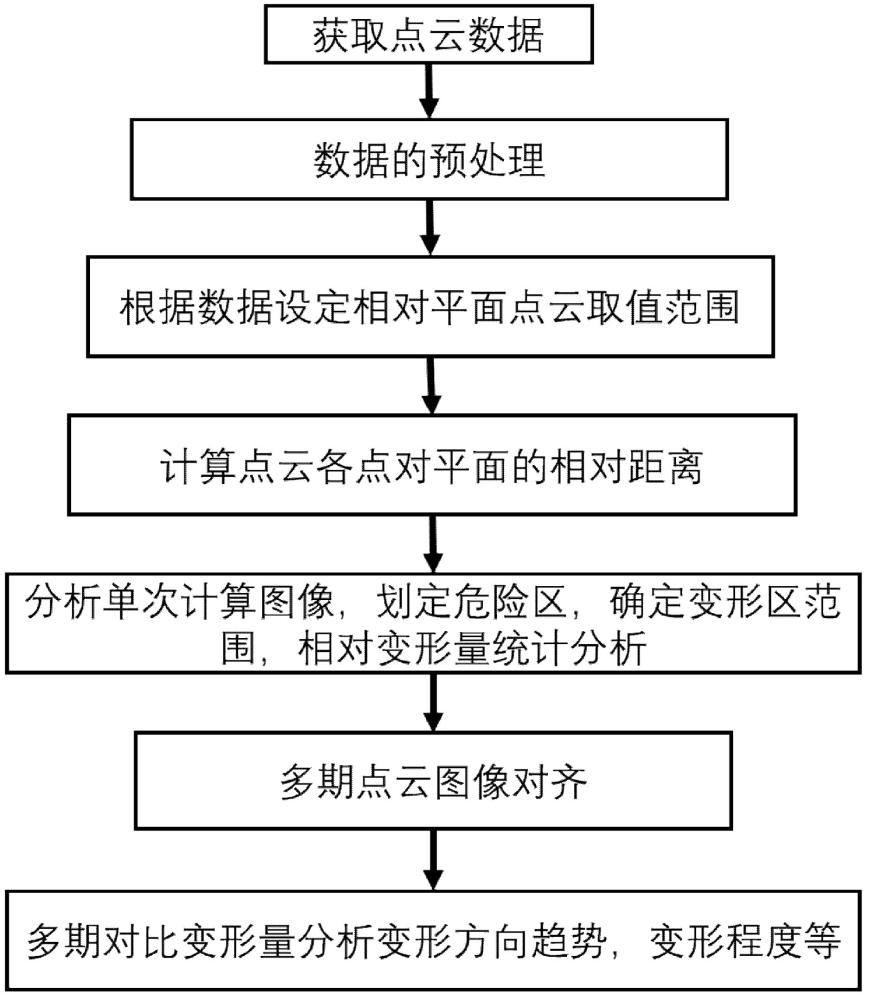
附图说明 下面结合附图和实施例对本发明作进一步说明。 图1为本发明基于三维激光扫描点云数据的岩体变形描述方法流程示意图。 图2为单次单点计算点云相对距离的具体过程图。 图3为本发明一实施例中对第一次混凝土模型进行点云相对距离计算并制图,图中可识别出凸起凌空处与凹陷区。 图4为本发明一实施例中对第二次混凝土模型进行点云相对距离计算并制图,在第一次模型基础上进行第一次变形。 图5为本发明一实施例中对第三次混凝土模型进行点云相对距离计算并制图,在第二次模型基础上进行第二次变形。 技术领域 本发明涉及斜坡变形监测技术领域,特别是涉及基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法。 具体实施方式 下面结合附图对本发明的实施方式做进一步的说明。 实施例1: 为了实现上述的技术特征,本发明的目的是这样实现的:基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,包括以下步骤: 步骤1,对岸坡岩体进行三维激光扫描,获取观测处待处理的岸坡岩体点云空间坐标信息; 步骤2,利用ATLAscan及Geomagic对获取的原始点云进行预处理,得到一级点云: 其中,对原始点云进行预处理包括删除非研究区点云、点云去噪和重采样操作。 所述ATLAscan为多模式、多功能量测3D扫描仪;所述Geomagic为一款结合了实时三维扫描、三维点云和三角网格编辑功能以及全面CAD造型设计、装配建模、二维出图等功能的三维设计软件。 步骤3,利用一级点云坐标确定最佳拟合平面,每个点均有一拟合平面: 步骤3.1,计算任意一点坐标与其它点的距离pij: 利用一级点云数据各点坐标值,计算点Pi(i=1……n)与其它点Pj(j=1……n,j≠i)坐标值的二范数,计算值为pij,结果置于集合Di(i=1……n),n为一级点云总点数; 步骤3.2,拟合平面点选取: 设定相对拟合平面取值范围d,d值大小取决于点云密度与研究对象大小,d值过小会导致用于平面拟合点过少,各点变形大于d时对变形检测不敏感;d值越大运算越慢且不同点拟合出平面相似性越大,导致对小距离不敏感;针对点i(xi,yi,zi),对其对应的集合Di中各元素pij与d值进行比较,若pij≤d,则将点j(xj,yj,zj)的坐标值置于集合Ki(i=1……n); 步骤3.3,采用SVD法确定最佳拟合平面: 计算集合Ki中点云坐标X,Y,Z的各自均值Xmean,Ymean,Zmean;利用集合Ki中所有元素构建系数矩阵: 对矩阵A进行奇异值分解,A=UDVT,其中:D为对角矩阵,U和V均为酉矩阵;最小奇异值对应的特征向量即为拟合平面的系数向量,拟合平面aix+biy+ciz+di=0,系数ai=V(1,3);bi=V(2,3);ci=V(3,3);di=-[a,b,c]·[Xmean,Ymean,Zmean]。 其中,所述SVD法(Singular Value Decomposition)是机器学习算法的基石。在某些方面与对称矩阵或Hermite矩阵基于特征向量的对角化类似。然而这两种矩阵分解尽管有其相关性,但还是有明显的不同。谱分析的基础是对称阵特征向量的分解,而奇异值分解则是谱分析理论在任意矩阵上的推广。SVD奇异值分解在矩阵理论的重要性不言而喻,它在最优化问题、特征值问题、最小乘方问题、广义逆矩阵、统计学、图像处理和自然语言处理等方面都有十分重要的应用。因此,本实施例中采用SVD法。 步骤4,计算任意点到最佳拟合平面的距离: 计算点i到其最佳拟合平面α的距离L(i): 步骤5,对步骤4中所得到的距离区分正负: 将三维激光扫描初始点(0,0,0)及点i(xi,yi,zi)坐标,带入点i的对应方程(aix+biy+ciz+di)*(d),结果为负则距离为负值,反之为正值,并修正。 步骤6,采用RGB进行着色,获取点面距离色彩图: 将各点计算距离L赋予点云各点,并根据计算距离采用RGB着色,获取点面距离色彩图,在图中将计算距离较近点采用一种颜色区分,并表示该区域相对平坦,减少关注;距离为正值与负值采用不用颜色表示。 在本实施例中,将各点计算距离L赋予点云各点,并根据计算距离采用RGB着色,获取点面距离色彩图(附图3、附图4),图中计算距离较近点采用偏暗色,表示该区域相对平坦,可以减少关注。距离为正值与负值采用不用颜色表示。 其中,所述RGB色彩模式是工业界的一种颜色标准,是通过对红(R)、绿(G)、蓝(B)三个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色的,RGB即是代表红、绿、蓝三个通道的颜色。 步骤7,分析单期数据信息: 根据点面距离色彩图,在颜色明亮区域统计距离分布特征参数fmax,fmean等。 本实施例中,附图3中可明显看出凌空位置与尖角凸起位置被采用红色明显标出,同时整体凌空位置边缘被明显圈出。凹陷深部处备用蓝色标出。 步骤8,获取第二期点云数据,并重复操作步骤1~步骤7; 步骤9,对比两期点面距离色彩图,利用高亮着色区域进行易变形区域、变形边界范围及变形趋势识别。 本实施例中,附图4与附图5中,中间部分区域进行了明显变形,附图4中原本着色为平坦区域,变形边缘处出现标记为正值区域说明产生了位移,另一侧出现负值距离点;附图5中变形边缘处可观察出变形进一步扩大,同时边缘另一侧凹陷处更明显出现标记为负值区域,表示该位置观测对象进行了远离观测点方向变形。 步骤10,在危险区域对比分析距离分布特征参数,根据多期数据变化,得出相对距离变化,获取相对变形量数据。 本实施例中,根据附图3与附图1中数据对比,变形边缘处出现了约为8cm的最终变形量。 背景技术 坡体的变形发展趋势与速率、变形量是评价斜坡稳定状态及后期发展趋势的重要指标,而斜坡岩体的变形监测是获取斜坡变形信息的重要手段之一,因此,如何准确获取斜坡岩体变形信息对评价斜坡稳定性及灾害预测有重要意义。 采用三维激光扫描技术获取变形信息,在各领域已有所探索,常见的利用点云坐标获取变形量的方法有:两期点云基于点进行对齐,采用该方法将两期点云数据对齐后进行变形量的计算;提前建立好目标模型,获取点云数据将点云数据与模型重新进行对比,确定变形量。但利用点云数据进行岩体变形分析时存在以下不足:①采用点云对齐进行变形分析,工作量大,效率低,对齐效果参差不齐,多期数据对比过程繁琐。②岩体表面不规则导致预先模型建立困难,不便于将数据与模型进行对比。③单期点云数据难以表达斜坡岩体变形的有效信息。④没有控制变形基准点,难以实现对变形趋势的描述。 发明内容 本发明的目的是,提供一种基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,利用本方法能够直观进行变形危险区的识别,同时对于多期数据比较,基于相对变形面的前提,降低工作量提高效率,降低对齐难度,同时采用图像对齐方式替换传统的点云对齐方式,采用图像对齐后,根据危险区相对变形量范围的改变,直观判别变形区的范围变化及变形趋势的发展。 为了实现上述的技术特征,本发明的目的是这样实现的:基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,包括以下步骤: 步骤1,对岸坡岩体进行三维激光扫描,获取观测处待处理的岸坡岩体点云空间坐标信息; 步骤2,利用ATLAscan及Geomagic对获取的原始点云进行预处理,得到一级点云; 步骤3,利用一级点云坐标确定最佳拟合平面,每个点均有一拟合平面; 步骤4,计算任意点到最佳拟合平面的距离; 步骤5,对步骤4中所得到的距离区分正负; 步骤6,采用RGB进行着色,获取点面距离色彩图; 步骤7,分析单期数据信息; 步骤8,获取第二期点云数据,并重复操作步骤1~步骤7; 步骤9,对比两期点面距离色彩图,利用高亮着色区域进行易变形区域、变形边界范围及变形趋势识别; 步骤10,在危险区域对比分析距离分布特征参数,根据多期数据变化,得出相对距离变化,获取相对变形量数据。 所述步骤2中原始点云进行预处理包括删除非研究区点云、点云去噪和重采样操作。 所述步骤3中具体操作过程为: 步骤3.1,计算任意一点坐标与其它点的距离pij: 利用一级点云数据各点坐标值,计算点Pi(i=1……n)与其它点Pj(j=1……n,j≠i)坐标值的二范数,计算值为pij,结果置于集合Di(i=1……n),n为一级点云总点数; 步骤3.2,拟合平面点选取: 设定相对拟合平面取值范围d,d值大小取决于点云密度与研究对象大小,d值过小会导致用于平面拟合点过少,各点变形大于d时对变形检测不敏感;d值越大运算越慢且不同点拟合出平面相似性越大,导致对小距离不敏感;针对点i(xi,yi,zi),对其对应的集合Di中各元素pij与d值进行比较,若pij≤d,则将点j(xj,yj,zj)的坐标值置于集合Ki(i=1……n); 步骤3.3,采用SVD法确定最佳拟合平面: 计算集合Ki中点云坐标X,Y,Z的各自均值Xmean,Ymean,Zmean;利用集合Ki中所有元素构建系数矩阵: 对矩阵A进行奇异值分解,A=UDVT,其中:D为对角矩阵,U和V均为酉矩阵;最小奇异值对应的特征向量即为拟合平面的系数向量,拟合平面aix+biy+ciz+di=0,系数ai=V(1,3);bi=V(2,3);ci=V(3,3);di=-[a,b,c]·[Xmean,Ymean,Zmean]。 所述步骤4中具体计算过程为: 计算点i到其最佳拟合平面α的距离L(i): 所述步骤5中具体计算过程为: 将三维激光扫描初始点(0,0,0)及点i(xi,yi,zi)坐标,带入点i的对应方程(aix+biy+ciz+di)*(d),结果为负则距离为负值,反之为正值,并修正。 所述步骤6中着色具体操作过程为: 将各点计算距离L赋予点云各点,并根据计算距离采用RGB着色,获取点面距离色彩图,在图中将计算距离较近点采用一种颜色区分,并表示该区域相对平坦,减少关注;距离为正值与负值采用不用颜色表示。 所述步骤7中具体操作过程为: 根据点面距离色彩图,在颜色明亮区域统计距离分布特征参数fmax,fmean。 本发明有如下有益效果: 1、本发明能够直观进行变形危险区的识别,同时对于多期数据比较,基于相对变形面的前提,降低工作量提高效率,降低对齐难度,同时可将点云对齐更改为图像对齐,采用图像对齐后,根据危险区相对变形量范围的改变,直观判别变形区的范围变化及变形趋势的发展。 2、该方法针对目前岩体变形识别做出了如下改进: 1)针对以往点云变形描述方法,多先进行点云对齐操作再进行分析,或提前建立模型,将点云数据与模型进行对比获取变形。对于岩体,提前设置模型工作量大且困难,点云量大且分布不规则,采用提前建立模型和点云对齐困难较大。采用相对变形量的方法,提前设置相对变形面,后续变形分析以相对变形面为基准。同时根据岩体不规则的情况,提出采用利用点云进行平面拟合,将拟合平面作为相对变形基准面。 2)基于相对变形面的设定,单期数据获取后也可用于变形分析,获取部分扫描物信息。 3)基于变形发展时整体范围的不变,将不变点作为相对不变平面进行分析。多期数据对比时基于相同的相对变形面,更方便有效的获取变形发展趋势与变形量变化。通过比较多期数据中着色变形区的变化进行分析趋势,对变化较大的区域再进行相对变形量比较,可确定变化量。降低工作量。 The invention provides a rock mass deformation amount and deformation trend description method based on three-dimensional laser scanning point cloud data, and the method specifically comprises the steps: carrying out the three-dimensional laser scanning test of a rock mass, and obtaining the to-be-evaluated rock mass point cloud data with high precision; calculating the distance between each point of the point cloud, limiting the range of a fitting plane, and calculating the positive and negative distances between each point and the optimal fitting plane; and drawing a relative deformation scatter diagram of each point. According to the rock mass deformation and trend description method, the rock mass surface information is directly processed through three-dimensional laser scanning, the danger area in single-period point cloud data can be visually reflected, two-period relative deformation data of the danger area can be compared to determine expansion of the deformation development stage and the deformation area, and the deformation development stage and the deformation area can be determined. The multi-period point cloud registration process is reduced, the workload is reduced, and the method is more suitable for determining the deformation degree and trend of rock mass deformation and the danger area conveniently, rapidly and visually. 1.基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,包括以下步骤: 步骤1,对岸坡岩体进行三维激光扫描,获取观测处待处理的岸坡岩体点云空间坐标信息; 步骤2,利用ATLAscan及Geomagic对获取的原始点云进行预处理,得到一级点云; 步骤3,利用一级点云坐标确定最佳拟合平面,每个点均有一拟合平面; 步骤4,计算任意点到最佳拟合平面的距离; 步骤5,对步骤4中所得到的距离区分正负; 步骤6,采用RGB进行着色,获取点面距离色彩图; 步骤7,分析单期数据信息; 步骤8,获取第二期点云数据,并重复操作步骤1~步骤7; 步骤9,对比两期点面距离色彩图,利用高亮着色区域进行易变形区域、变形边界范围及变形趋势识别; 步骤10,在危险区域对比分析距离分布特征参数,根据多期数据变化,得出相对距离变化,获取相对变形量数据。 2.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤2中原始点云进行预处理包括删除非研究区点云、点云去噪和重采样操作。 3.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤3中具体操作过程为: 步骤3.1,计算任意一点坐标与其它点的距离pij: 利用一级点云数据各点坐标值,计算点Pi(i=1……n)与其它点Pj(j=1……n,j≠i)坐标值的二范数,计算值为pij,结果置于集合Di(i=1……n),n为一级点云总点数; 步骤3.2,拟合平面点选取: 设定相对拟合平面取值范围d,d值大小取决于点云密度与研究对象大小,d值过小会导致用于平面拟合点过少,各点变形大于d时对变形检测不敏感;d值越大运算越慢且不同点拟合出平面相似性越大,导致对小距离不敏感;针对点i(xi,yi,zi),对其对应的集合Di中各元素pij与d值进行比较,若pij≤d,则将点j(xj,yj,zj)的坐标值置于集合Ki(i=1……n); 步骤3.3,采用SVD法确定最佳拟合平面: 计算集合Ki中点云坐标X,Y,Z的各自均值Xmean,Ymean,Zmean;利用集合Ki中所有元素构建系数矩阵: 对矩阵A进行奇异值分解,A=UDVT,其中:D为对角矩阵,U和V均为酉矩阵;最小奇异值对应的特征向量即为拟合平面的系数向量,拟合平面aix+biy+ciz+di=0,系数ai=V(1,3);bi=V(2,3);ci=V(3,3);di=-[a,b,c]·[xmean,Ymean,Zmean]。 4.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤4中具体计算过程为: 计算点i到其最佳拟合平面α的距离L(i): 5.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤5中具体计算过程为: 将三维激光扫描初始点(0,0,0)及点i(xi,yi,zi)坐标,带入点i的对应方程(aix+biy+ciz+di)*(d),结果为负则距离为负值,反之为正值,并修正。 6.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤6中着色具体操作过程为: 将各点计算距离L赋予点云各点,并根据计算距离采用RGB着色,获取点面距离色彩图,在图中将计算距离较近点采用一种颜色区分,并表示该区域相对平坦,减少关注;距离为正值与负值采用不用颜色表示。 7.根据权利要求1所述基于三维激光扫描点云数据的岩体变形量及变形趋势的描述方法,其特征在于,所述步骤7中具体操作过程为: 根据点面距离色彩图,在颜色明亮区域统计距离分布特征参数fmax,fmean。