Motor vehicle e.g. passenger car, driving dynamics controlling device, has actuator that is controlled according to result of comparison between measured yaw rate and stationary desired yaw rate, from control module
Die
Erfindung betrifft eine Vorrichtung und ein Verfahren zur Regelung
der Fahrdynamik eines Fahrzeuges. Moderne
Kraftfahrzeuge werden heute mit fahrdynamischen Systemen ausgestattet,
die die Fahrdynamik von Personenkraftwagen und insbesondere das
Fahrverhalten in fahrdynamischen Grenzsituationen verbessern. Diese
Systeme sollen das Fahrzeug in Notsituationen stabilisieren und
somit Unfälle vermeiden helfen. Im Speziellen seien hier
das Elektronische Stabilitäts-Programm (ESP), die Überlagerungslenkung (AFS)
und die elektrische Servolenkung (Electric Power Steering – EPS)
erwähnt. In Zukunft werden noch weitere Regelsysteme, wie
z. B. die aktive Hinterachslenkung (Active Rear Wheel Steering – ARWS)
und das Torque-Vectoring (TV), für diesen Zweck eingesetzt
werden. Ziel dieser Systeme ist dabei nicht mehr alleine die Stabilität
des Fahrzeuges in allen Fahrsituationen zu gewährleisten,
sondern auch den Fahrspaß und den Komfort des Fahrers zu
steigern. Ein
aus dem Stand der Technik bekannter Parameter zur Steuerung der
Fahrdynamik des Fahrzeuges ist die Gierrate. In Gierratenregelungssystemen
wird der Fahrerwunsch, der grundsätzlich durch den Lenkwinkel
und die Geschwindigkeit des Fahrzeuges gegeben ist, in eine Sollgierrate
umgesetzt. Diese wird mit der, über einen geeigneten Gierratensensor,
am Fahrzeug gemessenen Gierrate verglichen. Entsprechend dem Ergebnis
dieses Vergleiches wird nachfolgend über ein Fahrdynamikregelsystem,
beispielsweise über ein Bremssystem, die Fahrdynamik des
Fahrzeuges derart beeinflusst, dass die Gierrate des Fahrzeuges
der Sollvorgabe (Sollgierrate) bestmöglich folgen kann. Aus
dem Stand der Technik sind verschiedene Methoden zur Gierratenregelung
bekannt. In
der Aus
der In
der Schließlich
ist aus der Aus
der Aus
der Aus
der Schließlich
ist aus der Die
aus dem Stand der Technik bekannten Verfahren und Vorrichtungen
erweisen sich in der Praxis besonders bei höheren Querbeschleunigungen,
vorzugsweise ab ca. 4 m/s2, als unzureichend
und führen in manchen Situationen zu einem für
den Fahrer unkomfortablen Regelungseingriff. Es
ist deshalb Aufgabe der Erfindung eine entsprechende Vorrichtung
sowie ein entsprechendes Verfahren zu entwickeln, dass sich durch
hohe Effizienz bei gleichzeitig geringen Kosten und optimierter
Rechenlaufzeit sowie durch möglichst realistische Vorgaben
für die zu berechnende Sollgierrate auszeichnet. Diese
Aufgabe wird durch die Vorrichtung nach Anspruch 1 sowie das Verfahren
nach Anspruch 8 gelöst. Definitionsgemäß entsprechend
einer Ausführungsform der Erfindung ist das erste von dem
zweiten Berechnungsmodell auch dann verschieden, wenn das erste
und das zweite Berechnungsmodell jeweils eine Funktion mit konstanter
Steigung aufweisen, die beiden Steigungen jedoch betragsmäßig
verschieden sind. Nach
einer besonderen Ausführungsform der Erfindung ist die
Steigung einer Funktion mit konstanter Steigung größer
0. Nach
einer besonderen Ausführungsform wird die Fahrzeuggeschwindigkeit
aufgrund der Raddrehzahl bestimmt. Nach
einer bevorzugten Ausführungsform ist durch die erfindungsgemäße
Vorrichtung eine harmonischere Regelung der Fahrdynamik möglich. Trotzdem
die Erfindung nach einer besonderen Ausführungsform mit
zwei Berechnungsmodellen und entsprechenden Funktionen geoffenbart
ist, ist die Verwendung von mehr als zwei Berechnungsmodellen zur Modellierung
des Reifenmodells durch die vorliegende Erfindung mit umfasst. Nach
einer besonderen Ausführungsform der Erfindung weist das
Reifenmodellierungsmodul beispielsweise 3 Untermodule mit 3 verschiedenen
Berechnungsmodellen und entsprechenden unterschiedlichen Funktionen
auf. Nach einer besonderen Ausführungsform der Erfindung
kann die Reifenkennlinie (Verlauf der Seitenkraft in Abhängigkeit
des Schräglaufwinkels) abschnittsweise durch verschiedene
Funktionen mit, vorzugsweise unterschiedlichen, konstanten Steigungen
angenähert werden. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung ist in dem ersten oder dem zweiten Berechnungsmodell
die Seitenkraft als eine erste Funktion des Schräglaufwinkels
vorgesehen, wobei die erste Funktion eine konstante Steigung aufweist.
Nach einer weiteren möglichen Ausführungsform ist
in beiden Berechnungsmodellen die Seitenkraft als Funktion des Schräglaufwinkels
vorgesehen, wobei beide Funktionen konstante, aber, insbesondere
betragsmäßig, unterschiedliche, Steigungen aufweisen. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung weist das erste Berechnungsmodell eine zweite Funktion
mit nicht-linearem, insbesondere nicht-linearem degressiven, Verhalten
und das zweite Berechnungsmodell die erste Funktion auf. Nach einer
bevorzugten Ausführungsform der erfindungsgemäßen
Vorrichtung stellen die erste und die zweite Funktion dabei die
stationären Seitenkräfte in Abhängigkeit
des Schräglaufwinkels dar. Nach
einer Ausführungsform der Erfindung wird definitionsgemäß unter
einer nicht-linearen Funktion eine Funktion mit nicht-konstanter
Steigung, beispielsweise eine polynomische Funktion, verstanden. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung weist das Lösungsmodul eine Logik zur iterativen
numerischen Lösung des Sollgierratenmodells durch ein numerisches
Lösungsverfahren, bevorzugt durch ein Nullstellenverfahren,
besonders bevorzugt nach dem Bisektionsverfahren, auf, wobei die
Logik des Lösungsmoduls eine Berechnungsschleife aufweist
und das Reifenmodellierungsmodul in die Berechnungsschleife so eingebunden
ist, dass die Berechnungsschleife solange, bevorzugt mehr als einmal,
besonders bevorzugt zumindest zwanzigmal, durchlaufen werden kann,
bis die Sollgierrate des Fahrzeuges in einer gewünschten
Genauigkeit bestimmt ist. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung ist ein der Einrichtung zur Sollgierratenberechnung
vorgeschaltetes Vorgabemodul vorgesehen, über welches eine,
insbesondere lineare, Abschätzung von am Fahrzeug auftretenden
stationären Seitenkräften anhand eines, insbesondere
linearen, Reifenmodells durchführbar ist, wobei über
diese Abschätzung geeignete Startwerte für das
numerische Lösungsverfahren, insbesondere Nullstellenverfahren,
bestimmbar sind. Unter einer linearen Abschätzung der Seitenkräfte
wird nach einer Ausführungsform definitionsgemäß eine
Abschätzung der am Fahrzeug auftretenden Seitenkräfte
mittels eines linearen Modells, vorzugsweise mittels eines linearen
Einspurmodells, besonders bevorzugt nach der Ackermann-Gleichung,
verstanden. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung weist der Sensor zur Bestimmung des Lenkwinkels einen
Sensor zur Bestimmung des Radeinschlages zumindest eines der vorderen
Räder des Fahrzeuges sowie einen Sensor zur Bestimmung
des Radeinschlages zumindest eines der hinteren Räder des
Fahrzeuges auf. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung ist das Schräglaufwinkelbestimmungsmodul in
die Berechnungsschleife des Lösungsmoduls eingebunden. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung weist das Schräglaufwinkelbestimmungsmodul
ein erstes Schräglaufwinkeluntermodul zur Bestimmung des
Schräglaufwinkels zumindest eines der vorderen Räder
des Fahrzeuges sowie ein zweites Schräglaufwinkeluntermodul
zur Bestimmung des Schräglaufwinkels zumindest eines der
hinteren Räder des Fahrzeuges auf. Nach
einer besonderen Ausführungsform der erfindungsgemäßen
Vorrichtung weist die Einrichtung zur Sollgierratenberechnung ein
Aufstandskraftmodul zur Bestimmung der Aufstandskräfte
des Fahrzeuges auf. Nach einer besonderen Ausführungsform
ist dabei das Aufstandskraftmodul in die Berechnungsschleife des
Lösungsmoduls eingebunden. Nach
einer weiteren Ausführungsform ist die Erfindung durch
ein Verfahren nach Anspruch 8 gekennzeichnet. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens ist entweder in dem ersten oder zweiten Berechnungsmodell
die Seitenkraft als eine erste Funktion des Schräglaufwinkels
formuliert, wobei die erste Funktion eine konstante Steigung aufweist.
Nach einer weiteren möglichen Ausführungsform
ist in beiden Berechnungsmodellen die Seitenkraft als Funktion des
Schräglaufwinkels vorgesehen, wobei beide Funktionen konstante,
aber unterschiedliche, Steigungen aufweisen. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens weist das erste Berechnungsmodell eine zweite Funktion
mit nicht-linearem Verhalten auf und weist das zweite Berechnungsmodell die
erste Funktion auf. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens weist das Lösungsmodul eine Logik zur iterativen
numerischen Lösung des Sollgierratenmodells durch ein numerisches
Lösungsverfahren, vorzugsweise durch ein Nullstellenverfahren,
besonders bevorzugt nach dem Bisektionsverfahren, auf. Nach einer
bevorzugten Ausführungsform sind der zweite und dritte
Verfahrensschritt in der Logik des Lösungsmoduls in eine
Berechnungsschleife eingebunden, wobei der zweite und dritte Verfahrensschritt
in der Berechnungsschleife durch Anwendung des numerischen Lösungsverfahrens
solange, bevorzugt mehr als einmal, besonders bevorzugt zumindest
zwanzigmal, abgearbeitet werden, bis die Sollgierrate des Fahrzeuges
in einer gewünschten Genauigkeit bestimmt ist. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens wird das mathematisch formulierte Sollgierratenmodell
als Funktion der Seitenkraft nach dem Intervallhalbierungsverfahren
durch Nullstellensuche gelöst. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens ist ein der Einrichtung zur Sollgierratenberechnung vorgeschaltetes
Vorgabemodul vorgesehen, über welches eine Abschätzung
der am Fahrzeug auftretenden stationären Seitenkräfte,
anhand eines, insbesondere linearen, Reifenmodells durchgeführt
wird, wobei über diese Abschätzung geeignete Startwerte
für das numerische Lösungsverfahren bestimmt werden. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens weist die Einrichtung zur Sollgierratenberechnung ein
Aufstandskraftmodul auf, wobei über das Aufstandskraftmodul
die Aufstandskräfte des Fahrzeuges bestimmt werden und
das Aufstandskraftmodul in die Berechnungsschleife eingebunden und
abgearbeitet wird. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens weist das Schräglaufwinkelbestimmungsmodul ein
erstes Schräglaufwinkeluntermodul zur Bestimmung des Schräglaufwinkels
der vorderen Räder des Fahrzeuges sowie ein zweites Schräglaufwinkeluntermodul
zur Bestimmung des Schräglaufwinkels der hinteren Räder
des Fahrzeuges auf. Nach
einer besonderen Ausführungsform des erfindungsgemäßen
Verfahrens weist der Sensor zur Bestimmung des Lenkwinkels einen
Sensor zur Bestimmung des Radeinschlages zumindest eines der vorderen
Räder des Fahrzeuges und/oder einen Sensor zur Bestimmung
des Radeinschlages zumindest eines der hinteren Räder des
Fahrzeuges auf. Die
Erfindung ist ferner durch ein Verfahren nach Anspruch 14 gekennzeichnet. Nach
einer besonderen Ausführungsform des Verfahren zur Generierung
eines Kennfeldes zur Sollgierratenregelung eines Fahrzeuges werden
ein erster Parameterbereich für den Lenkwinkel und ein
zweiter Parameterbereich für die Fahrzeuggeschwindigkeit
bestimmt, und über das erste und das zweite Vorgabemodul
in den beiden Parameterbereichen zugehörige stationäre
Sollgierraten rechnerisch bestimmt und in dem Kennfeld abgelegt. Die
Erfindung ist nachfolgend anhand einer beispielhaften und nicht
einschränkenden Ausführungsform durch mehrere
schematische Zeichnungen dargestellt. Es zeigen: Die
im Folgenden beschriebenen Module bilden die Funktionalität
sowie zumindest teilweise Funktionen eines Berechnungsverfahrens
bzw. eines entsprechenden Prozesses zur Sollwertregelung ab. Demnach können
beispielsweise mehrere Module baulich getrennt oder kombiniert in
einem oder mehreren Steuergeräten untergebracht werden. Wie
aus Nach
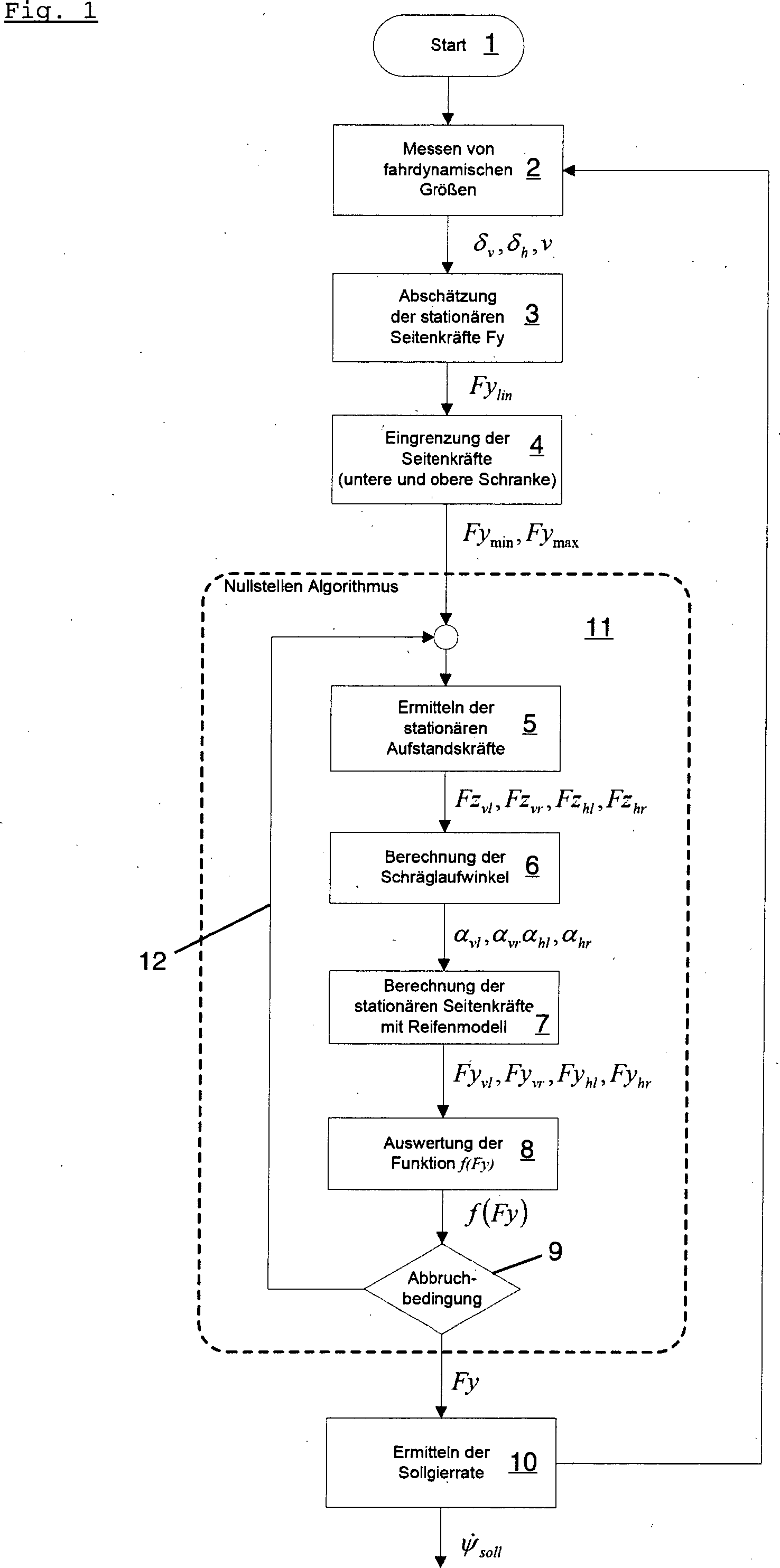
der Abschätzung der Seitenkräfte in Schritt 3,
werden in einem Schritt 4 in dem Vorgabemodul 26a aus
der geschätzten Seitenkraft mittels geeigneter Berechnungsvorschriften
geeignete Seitenkraft-Startwerte (obere und untere Seitenkraftschranke)
für die nun folgenden Berechnungsschritte, insbesondere
für den folgenden numerischen Algorithmus zur Bestimmung
der Sollgierrate gewählt. Nach einer besonderen Ausführungsform
der Erfindung kann die Abschätzung der oberen und unteren
Schranke auf Basis des, aus einem linearen Modell, insbesondere
in Prozessschritt 3, berechneten, Schätzwertes
durch Multiplikation mit zwei vorbestimmten Koeffizienten, d. h.
jeweils einem Koeffizienten für die untere Schranke sowie
jeweils einem Koeffizienten für die obere Schranke, erfolgen.
Wurden bereits in Prozessschritt 3 geeignete Schranken bestimmt
kann Prozessschritt 4 ersatzlos entfallen. In
einem Schritt 5 werden mittels eines Aufstandskraftmoduls 28 die
sich an den Rädern stationär einstellenden Aufstandskräfte
des Fahrzeuges berechnet. Die Aufstandskraft hat einen wesentlichen
Einfluss auf die am Fahrzeug wirkende Seitenkraft und damit auf
die zu bestimmende Sollgierrate. In
einem Schritt 6 werden durch das Schräglaufwinkelbestimmungsmodul 29 die
am Fahrzeug, vorzugsweise an der Vorderachse und gegebenenfalls
an der Hinterachse, auftretenden Schräglaufwinkel der Reifen
am Fahrzeug bestimmt. Entsprechende Berechnungsvorschriften, beispielsweise
auf Basis von inversen Reifenmodellen bzw. auf Basis von fahrdynamischen
Zusammenhängen, sind dem Fachmann aus dem Stand der Technik
bekannt, und werden an dieser Stelle deshalb nicht näher
erläutert. In
Schritt 7 werden auf Basis eines mathematisch formulierten
Reifenmodells in einem Reifenmodellierungsmodul 30 die
Gleichungen zur Bestimmung der Seitenkräfte, vorzugsweise
für jedes Rad des Fahrzeuges angesetzt. Das nach einer
möglichen Ausführungsform der Erfindung verwendete
Reifenmodell weist in einem ersten Bereich, der durch kleine Schräglaufwinkel
bis zu einem, in Abhängigkeit der Aufstandskraft und/oder
gegebenenfalls einem Reibwert, vordefinierten Grenzschräglaufwinkel
bestimmt ist, eine mathematische Funktion mit nichtlinearem Verhalten
(erstes Untermodul), sowie in einem zweiten Bereich, welcher höheren
Schräglaufwinkeln als dem vordefinierten Grenzschräglaufwinkel
entspricht, eine mathematische Funktion mit einer konstanten Steigung
(zweites Untermodul) auf. Dementsprechend werden dem Reifenmodell zwei
getrennte Funktionsgleichungen, im Sinne einer zusammengesetzten
Funktion, zugeordnet. Eine erste Funktionsgleichung bzw. Teilfunktion
entspricht dabei dem ersten Untermodul, eine zweite Funktionsgleichung bzw.
Teilfunktion entspricht dem zweiten Untermodul. Nach einer besonderen
Ausführungsform werden die berechneten Seitenkräfte
der Räder des Fahrzeuges zu einer vorzugsweise im Schwerpunkt
des Fahrzeuges angreifenden (Gesamt-)Seitenkraft des Fahrzeuges
addiert. Aus dem Reifenmodell wird in weiterer Folge das Sollgierratenmodell
formuliert. Das Sollgierratenmodell weist nach einer Ausführungsform
eine implizite Gleichung auf, die analytisch nicht lösbar
ist. Zur Lösung des Sollgierratenmodells wird nach einer
Ausführungsform der Erfindung ein numerisches Lösungsverfahren
vorgeschlagen. Dazu wird die Funktionsgleichung des Sollgierratenmodells
vorzugsweise so umgeformt, dass sich die Lösungssuche auf
eine Nullstellensuche der Funktion in Abhängigkeit der
Seitenkraft reduziert. Diese Nullstellensuche, die in Schritt 8 in
dem Lösungsmodul 31 durchgeführt wird,
wird iterativ nach dem Bisektionsverfahren (Intervallhalbierungsverfahren)
durchgeführt. Bei diesem, dem Fachmann aus der Fachliteratur
zu numerischen Algorithmen bekannten, Verfahren erfolgt eine Eingrenzung
der Nullstelle durch fortwährende Halbierung des Intervalls
in welchem die Nullstelle vermutet wird. Durch Vorzeichenvergleich
wird bestimmt, welche Hälfte des geteilten Intervalls für
die weitere numerische Annäherung an die zu bestimmende
Nullstelle weiter verfolgt werden soll. Somit kann die Nullstelle rasch
eingegrenzt und mit einer von der Anzahl der Iterationsschritte
abhängigen Genauigkeit bestimmt werden. Nach einer weiteren
möglichen Ausführungsform der Erfindung können
auch andere numerische Nullstellenverfahren, wie beispielsweise
das so genannte Newton-Raphson-Verfahren zur numerischen Nullstellensuche
verwendet werden. In Versuchen wurde jedoch beobachtet, dass die
Nullstelle des Sollgierratenmodells über das Intervallhalbierungsverfahren
schneller und sicherer berechnet werden kann, als beispielsweise über das
Newton-Raphson Verfahren. Nach
einer besonderen Ausführungsform der Erfindung kann im
Bereich sehr kleiner Fahrzeuggeschwindigkeiten, beispielsweise unterhalb
von 0,1 m/s, insbesondere über den gesamten nutzbaren Schräglaufwinkelbereich
ein vereinfachter, insbesondere linearer, Ansatz für das
Reifenmodell und somit für das Sollgierratenmodell verwendet
werden. Ein solcher linearer Ansatz könnte beispielsweise
auf der aus der Literatur bekannten Abschätzung nach Ackermann
basieren. Nach
weiteren Ausführungsformen kann das Reifenmodell in eine
beliebige Anzahl von Untermodulen mit entsprechenden getrennten
Funktionsgleichungen aufgegliedert werden, wodurch sich die Rechenzeit
womöglich weiter verringern lässt. Nach
einer weiteren Ausführungsform der Erfindung weisen sowohl
das erste als auch das zweite Untermodul Funktionen mit konstanter
Steigung auf. Nach einer besonderen Ausführungsform wird
der Bereich vor Erreichen des vordefinierten Grenzschräglaufwinkels
durch mehrere Funktionen mit konstanter Steigung angenähert. Nach
einer bevorzugten Ausführungsform wird definitionsgemäß der
aus der Literatur bekannte Grenzschräglaufwinkel bzw. kritische
Schräglaufwinkel bzw. der Schräglaufwinkel bei
maximaler Seitenkraft als vorbestimmter Schräglaufwinkel,
wie er Gegenstand der Ansprüche ist, bezeichnet. Als
nichtlineares Reifenmodell findet nach einer beispielhaften Ausführungsform
entweder das aus der Literatur bekannte Pacejka-Modell oder alternativ
das TM-Easy Modell Verwendung. Die Erfindung ist jedoch nicht auf
die Verwendung dieser beiden Modelle beschränkt und eignet
sich auch zur Anwendung für viele andere Modelle. Die aus
der Literatur bekannten nicht-linearen Gleichungen nach Pacejka
und TM-Easy werden dabei nur in jenem Teilbereich Verwendung finden,
in welchem sie einen streng monotonen Verlauf zeigen, also insbesondere
bis zum Erreichen des Grenzschräglaufwinkel. Wird im Sinne
einer zusammengesetzten Funktion die nichtlineare Gleichung aus
dem ersten Untermodul durch eine Funktion mit konstanter Steigung aus
dem, an das erste Modul anschließenden, zweiten Modul kombiniert,
kann über den gesamten relevanten Verlauf der Seitenkraft
in Abhängigkeit des Schräglaufwinkel ein streng
monotones Verhalten der zusammengesetzten Modellgleichung und somit
eine eindeutige Lösung des Sollgierratenmodells erreicht
werden. Die
nach einer Ausführungsform der Erfindung in Prozessschritt 7 angewandte
adaptierte Reifenfunktion zur Bestimmung der Seitenkraft Fy als
Funktion des Schräglaufwinkels α weist in einem
ersten Teilbereich (erstes Untermodul) eine nicht-lineare, auf dem
TM-Easy Modell basierende, erste Funktion, entsprechend Gleichung
(1), sowie in einem zweiten Teilbereich (zweites Untermodul) eine
durch eine konstanten Steigung charakterisierte zweite Funktion,
entsprechend Gleichung (2), auf, und kann, wie folgt, mathematisch
formuliert werden: Es
gilt weiters Fy(α) = –Fy(–α)
für α < 0.
Somit ist für negative Schräglaufwinkel die berechnete
Seitenkraft mit einem negativen Vorzeichen versehen. Das
verwendete Reifenmodell ist in Fügt
man die aus der Literatur bekannten Gleichungen zusammen, so erhält
man die folgende implizite Funktion für die Berechnung
der Sollgierrate : Diese
Formel ist analytisch nicht lösbar. Durch Umformen, wie
aus der Literatur bekannt, kann sie auf die Berechnung der Seitenkräfte
zurückgeführt werden: Die
Berechnung der Seitenkräfte kann weiter auf ein Nullstellenproblem
vereinfacht werden: Die
Lösung bzw. Auswertung dieser Gleichung bzw. Funktion,
die als Sollgierratenmodell durch das Lösungsmodul 31 gelöst
wird, und in Wie
in Ist
die Seitenkraft genügend genau bestimmt, kann in einem
Prozessschritt 10 aus der ermittelten Seitenkraft, wie
aus der Literatur bekannt, mit der Masse des Fahrzeuges in dem Sollgierratenmodell
die stationäre Querbeschleunigung des Fahrzeuges und nachfolgend
aus der Querbeschleunigung mittels Division durch die Geschwindigkeit
des Fahrzeuges die Sollgierrate bestimmt werden. Wie
in Die
Sollgierrate wird mit der tatsächlich am Fahrzeug gemessenen
Gierrate verglichen und im Falle einer Diskrepanz zwischen Soll-
und Istwert, vorzugsweise entsprechend einem Regelgesetz, steuernd und/oder
regelnd in die Fahrzeugdynamik eingegriffen. Durch diesen Eingriff
soll der Ist-Wert der Gierrate dem Sollwert (Sollgierrate) angeglichen
und so die Stabilität der Fahrdynamik des Fahrzeuges wieder
hergestellt werden. Zur
Verdeutlichung ist in Zur
weiteren Verdeutlichung der erläuterten beispielhaften
Ausführungsform der Erfindung ist in Durch
das erfindungsgemäße Verfahren wird jene stationäre
Sollgierrate bestimmt bzw. vorausberechnet, die sich nach Abklingen
von Einschwingvorgängen, insbesondere Gieren, Wanken und/oder
Nicken am Fahrzeug gemäß dem verwendeten Fahrzeugmodell
einstellen soll. Diese Sollgierrate wird als stationäre Sollgierrate
bezeichnet. Nach
einer besonderen Ausführungsform der Erfindung wird nach
der beschriebenen Berechnungsmethode ein Kennfeld zur Sollgierratenbestimmung
eingerichtet. In einem Applikationsdurchlauf werden dabei für
verschiedene Fahrzeuggeschwindigkeiten und/oder Lenkwinkel gemäß dem
skizzierten Verfahren stationäre Sollgierraten errechnet
und in dem Kennfeld abgelegt. Im Rahmen der Fahrdynamikregelungen
wird für die Fahrzeuggeschwindigkeit und den Lenkwinkel
die zugeordnete stationäre Sollgierrate aus dem Kennfeld ausgelesen.
Durch diese Vereinfachung stehen die benötigten Werte der
Sollgierrate einfach und schnell für die Sollgierratenregelung
zur Verfügung. Diese Liste
der vom Anmelder aufgeführten Dokumente wurde automatisiert
erzeugt und ist ausschließlich zur besseren Information
des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen
Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt
keinerlei Haftung für etwaige Fehler oder Auslassungen. The device has an actuator that is controlled according to a result of comparison between a measured yaw rate and a stationary desired yaw rate, from a control module. The actuator is provided as a part of a controllable and/or regulatable subsystem for front wheel or rear wheel steering, a brake system, a dampening- and ride-control system, a torque vectoring- and all wheel-system, an engine- and gear-management system, a hybrid system, or another controllable and/or regulatable subsystem. Independent claims are also included for the following: (1) a method for controlling driving dynamics of a vehicle (2) a method for generating a characteristic map for desired yaw control of a vehicle. Vorrichtung zur Regelung der Fahrdynamik eines
Fahrzeuges, Vorrichtung nach Anspruch 1, dadurch gekennzeichnet,
dass in dem ersten oder dem zweiten Berechnungsmodell die Seitenkraft
als eine erste Funktion des Schräglaufwinkels vorgesehen
ist, wobei die erste Funktion eine konstante Steigung aufweist. Vorrichtung nach Anspruch 2, dadurch gekennzeichnet,
dass das erste Berechnungsmodell eine zweite Funktion mit nicht-linearem,
insbesondere nicht-linearem degressivem, Verhalten aufweist und
das zweite Berechnungsmodell die erste Funktion aufweist. Vorrichtung nach einem der Ansprüche 1 bis
3, dadurch gekennzeichnet, dass das Lösungsmodul eine Logik
zur iterativen Lösung des Sollgierratenmodells durch ein
numerisches Lösungsverfahren, bevorzugt durch ein Nullstellenverfahren,
besonders bevorzugt nach dem Bisektionsverfahren, aufweist, wobei
die Logik des Lösungsmoduls eine Berechnungsschleife aufweist
und das Reifenmodellierungsmodul in die Berechnungsschleife so eingebunden
ist, dass die Berechnungsschleife solange, bevorzugt mehr als einmal,
besonders bevorzugt zumindest zwanzigmal, durchlaufen werden kann,
bis die Sollgierrate des Fahrzeuges in einer gewünschten
Genauigkeit bestimmt ist. Vorrichtung nach Anspruch 4, dadurch gekennzeichnet,
dass ein der Einrichtung zur Sollgierratenberechnung vorgeschaltetes
Vorgabemodul vorgesehen ist, über welches eine Abschätzung
der am Fahrzeug auftretenden stationären Seitenkräfte
anhand eines, insbesondere linearen, Reifenmodells durchführbar
ist und über diese Abschätzung geeignete Startwerte
für das numerische Nullstellenverfahren bestimmbar sind. Vorrichtung nach einem der Ansprüche 1 bis
5, dadurch gekennzeichnet, dass das Schräglaufwinkelbestimmungsmodul
in die Berechnungsschleife des Lösungsmoduls eingebunden
ist. Vorrichtung nach einem der Ansprüche 1 bis
6, dadurch gekennzeichnet, dass die Einrichtung zur Sollgierratenberechnung
ein Aufstandskraftmodul zur Bestimmung der Aufstandskräfte
des Fahrzeuges aufweist, und das Aufstandskraftmodul in die Berechnungsschleife
des Lösungsmoduls eingebunden ist. Verfahren zur Fahrdynamikregelung eines Fahrzeuges Verfahren nach Anspruch 8, dadurch gekennzeichnet,
dass entweder in dem ersten oder zweiten Berechnungsmodell die Seitenkraft
als eine erste Funktion des Schräglaufwinkels formuliert
ist, wobei die erste Funktion eine konstante Steigung aufweist. Verfahren nach Anspruch 9, dadurch gekennzeichnet,
dass das erste Berechnungsmodell eine zweite Funktion mit nicht-linearem
Verhalten aufweist und das zweite Berechnungsmodell die erste Funktion
aufweist. Verfahren nach einem der Ansprüche 8 bis
10, dadurch gekennzeichnet, dass das Lösungsmodul eine Logik
zur iterativen Lösung des Sollgierratenmodells, durch ein
numerisches Lösungsverfahren, vorzugsweise durch ein Nullstellenverfahren,
besonders bevorzugt nach dem Bisektionsverfahren, aufweist, Verfahren nach Anspruch 11, dadurch gekennzeichnet,
dass ein der Einrichtung zur Sollgierratenberechnung vorgeschaltetes
Vorgabemodul vorgesehen ist, über welches eine Abschätzung
der am Fahrzeug auftretenden stationären Seitenkräfte
anhand eines, insbesondere linearen, Reifenmodells durchgeführt
wird und über diese Abschätzung geeignete Startwerte
für das numerische Lösungsverfahren bestimmt werden. Verfahren nach einem der Ansprüche 8 bis
12, dadurch gekennzeichnet, dass die Einrichtung zur Sollgierratenberechnung
ein Aufstandskraftmodul aufweist, wobei über das Aufstandskraftmodul
die Aufstandskräfte des Fahrzeuges bestimmt werden und
das Aufstandskraftmodul in die Berechnungsschleife des Lösungsmoduls
eingebunden wird. Verfahren zur Generierung eines Kennfeldes zur Sollgierratenregelung
eines Fahrzeuges, mit einem ersten Vorgabemodul zur Vorgabe eines
Lenkwinkels und einem zweiten Vorgabemodul zur Vorgabe einer Fahrzeuggeschwindigkeit
und mit einer Einrichtung zur Sollgierratenberechnung, wobei die
Einrichtung zur Sollgierratenberechnung ein Schräglaufwinkelbestimmungsmodul
zur Bestimmung eines Schräglaufwinkels eines Reifens am
Fahrzeug, ein Reifenmodellierungsmodul zur Bestimmung einer an dem
Reifen des Fahrzeugs auftretenden Seitenkraft sowie ein Lösungsmodul
zur Bestimmung einer stationären Sollgierrate aufweist,
wobei das Reifenmodellierungsmodul ein erstes sowie ein zweites
Untermodul zur Bestimmung der an dem Reifen des Fahrzeugs auftretenden
Seitenkraft aufweist, wobei in dem ersten Untermodul ein erstes
Berechnungsmodell zur Berechnung der auftretenden Seitenkraft im
Bereich unterhalb von und bis zu einem vorbestimmten Schräglaufwinkel
vorgesehen ist und in dem zweiten Untermodul ein zweites Berechnungsmodell zur
Berechnung der auftretenden Seitenkraft im Bereich oberhalb des
vorbestimmten Schräglaufwinkels vorgesehen ist, und ausgehend
von dem durch das erste Vorgabemodul vorgegebenen Lenkwinkel und
der durch das zweite Vorgabemodul vorgegebenen Fahrzeuggeschwindigkeit
in einem ersten Verfahrensschritt unter Berücksichtigung
des Lenkwinkels ein Radeinschlag des Fahrzeuges bestimmt wird, und
in einem zweiten Verfahrensschritt aus dem Radeinschlag und der
Fahrzeuggeschwindigkeit in dem Schräglaufwinkelbestimmungsmodul
der Schräglaufwinkel des Reifens sowie in dem Reifenmodellierungsmodul
die Seitenkraft des Fahrzeuges bestimmt werden, und weiter in einem
dritten Verfahrensschritt unter Berücksichtigung der Seitenkraft
in dem Lösungsmodul mittels eines Sollgierratenmodells
die stationäre Sollgierrate des Fahrzeugs bestimmt, und
nachfolgend die so ermittelte dem Lenkwinkel und der Fahrzeuggeschwindigkeit
zugeordnete stationäre Sollgierrate in dem Kennfeld abgelegt
wird. Verfahren zur Generierung eines Kennfeldes zur Sollgierratenregelung
eines Fahrzeuges nach Anspruch 14, dadurch gekennzeichnet, dass
ein erster Parameterbereich für den Lenkwinkel und ein
zweiter Parameterbereich für die Fahrzeuggeschwindigkeit
bestimmt werden, und über das erste und das zweite Vorgabemodul
in den beiden Parameterbereichen zugehörige stationäre
Sollgierraten rechnerisch bestimmt und in dem Kennfeld abgelegt
werden.ZITATE ENTHALTEN IN DER BESCHREIBUNG
Zitierte Patentliteratur
mit einem Fahrzeugbeobachtungsmodul zur Aufnahme
von Fahrzeugparametern, wobei das Fahrzeugbeobachtungsmodul zumindest
einen Sensor zur Aufnahme eines Lenkwinkels, einen Sensor zur Aufnahme
einer Fahrzeuggeschwindigkeit sowie einen Sensor zur Bestimmung
einer Gierrate des Fahrzeuges aufweist, und
mit einer Einrichtung
zur Sollgierratenberechnung, wobei die Einrichtung zur Sollgierratenberechnung
ein Schräglaufwinkelbestimmungsmodul zur Bestimmung eines
Schräglaufwinkels eines Reifens am Fahrzeug, ein Reifenmodellierungsmodul
zur Bestimmung einer an dem Reifen des Fahrzeugs auftretenden Seitenkraft sowie
ein Lösungsmodul zur Bestimmung einer stationären
Sollgierrate aufweist,
wobei das Reifenmodellierungsmodul ein
erstes sowie ein zweites Untermodul aufweist,
wobei in dem
ersten Untermodul die auftretende Seitenkraft im Bereich unterhalb
von und bis zu einem vorbestimmten Schräglaufwinkel gemäß einem
ersten Berechnungsmodell bestimmbar ist, und
wobei in dem zweiten
Untermodul die auftretende Seitenkraft im Bereich oberhalb des vorbestimmten
Schräglaufwinkels gemäß einem zweiten,
von dem ersten Berechnungsmodell verschiedenen, Berechnungsmodell bestimmbar
ist,
und in dem Lösungsmodul mittels eines Sollgierratenmodells
aus der Seitenkraft die stationäre Sollgierrate berechenbar
ist,
und ein Aktuator vorgesehen ist, der entsprechend einem
Ergebnis eines Vergleichs zwischen der gemessenen Gierrate und der
stationären Sollgierrate, insbesondere von einem Regelmodul,
ansteuerbar ist, wobei der Aktuator als Teil eines steuerbaren und/oder
regelbaren Subsystems zur Vorderrad- und/oder Hinterradlenkung und/oder
eines Bremssystems und/oder eines Dämpfungs- und/oder Niveauregelungssystems
und/oder eines Torque Vectoring und/oder Allradsystems und/oder
eines Motor- und/oder Getriebemanagementsystems und/oder Hybridsystems
und/oder eines anderen steuerbaren und/oder regelbaren Subsystems
vorgesehen ist.
mit
zumindest einem Sensor zur Aufnahme eines Lenkwinkels, einem Sensor
zur Aufnahme einer Fahrzeuggeschwindigkeit sowie einem Sensor zur
Bestimmung einer Gierrate des Fahrzeuges, und
mit einer Einrichtung
zur Sollgierratenberechnung,
wobei die Einrichtung zur Sollgierratenberechnung
ein Schräglaufwinkelbestimmungsmodul zur Bestimmung eines
Schräglaufwinkels eines Reifens am Fahrzeug und ein Reifenmodellierungsmodul
zur Bestimmung einer an dem Reifen des Fahrzeugs auftretenden Seitenkraft,
sowie ein Lösungsmodul zur Bestimmung einer stationären
Sollgierrate aufweist,
wobei das Reifenmodellierungsmodul ein
erstes sowie ein zweites Untermodul zur Bestimmung der an dem Reifen
des Fahrzeugs auftretenden Seitenkraft aufweist,
wobei in dem
ersten Untermodul ein erstes Berechnungsmodell zur Berechnung der
auftretenden Seitenkraft im Bereich unterhalb von und bis zu einem
vorbestimmten Schräglaufwinkel vorgesehen ist und in dem
zweiten Untermodul ein zweites Berechnungsmodell zur Berechnung
der auftretenden Seitenkraft im Bereich oberhalb des vorbestimmten
Schräglaufwinkels vorgesehen ist,
und in einem ersten
Verfahrensschritt unter Berücksichtigung des Lenkwinkels
ein Radeinschlag des Fahrzeuges bestimmt wird, und in einem zweiten
Verfahrensschritt aus dem Radeinschlag und der Fahrzeuggeschwindigkeit
der Schräglaufwinkel sowie die Seitenkraft bestimmt werden,
und weiter in einem dritten Verfahrensschritt unter Berücksichtigung
der Seitenkraft mittels eines Sollgierratenmodells die stationäre
Sollgierrate des Fahrzeugs bestimmt wird, und auf Basis eines Vergleichs
der gemessenen Gierrate mit der stationären Sollgierrate,
insbesondere von einem Regelmodul, ein Aktuator angesteuert wird,
wobei der Aktuator als Teil eines steuerbaren und/oder regelbaren
Subsystems zur Vorderrad- und/oder Hinterradlenkung und/oder Bremssystems
und/oder eines Dämpfungs- und/oder Niveauregelungssystems
und/oder eines Torque Vectoring und/oder Allradsystems und/oder
eines Motor- und/oder Getriebemanagementsystems und/oder Hybridsystems
und/oder eines anderen Subsystems vorgesehen ist und der Aktuator
stabilisierend in die Fahrdynamik des Fahrzeuges eingreift.
und
der zweite und dritte Verfahrensschritt in der Logik des Lösungsmoduls
in eine Berechnungsschleife eingebunden sind,
wobei der zweite
und dritte Verfahrensschritt in der Berechnungsschleife durch Anwendung
des numerischen Lösungsverfahrens solange, bevorzugt mehr
als einmal, besonders bevorzugt zumindest zwanzigmal, abgearbeitet
werden, bis die Sollgierrate des Fahrzeuges in einer gewünschten
Genauigkeit bestimmt ist.