Verfahren und System zum Laden eines Elektrofahrzeugs
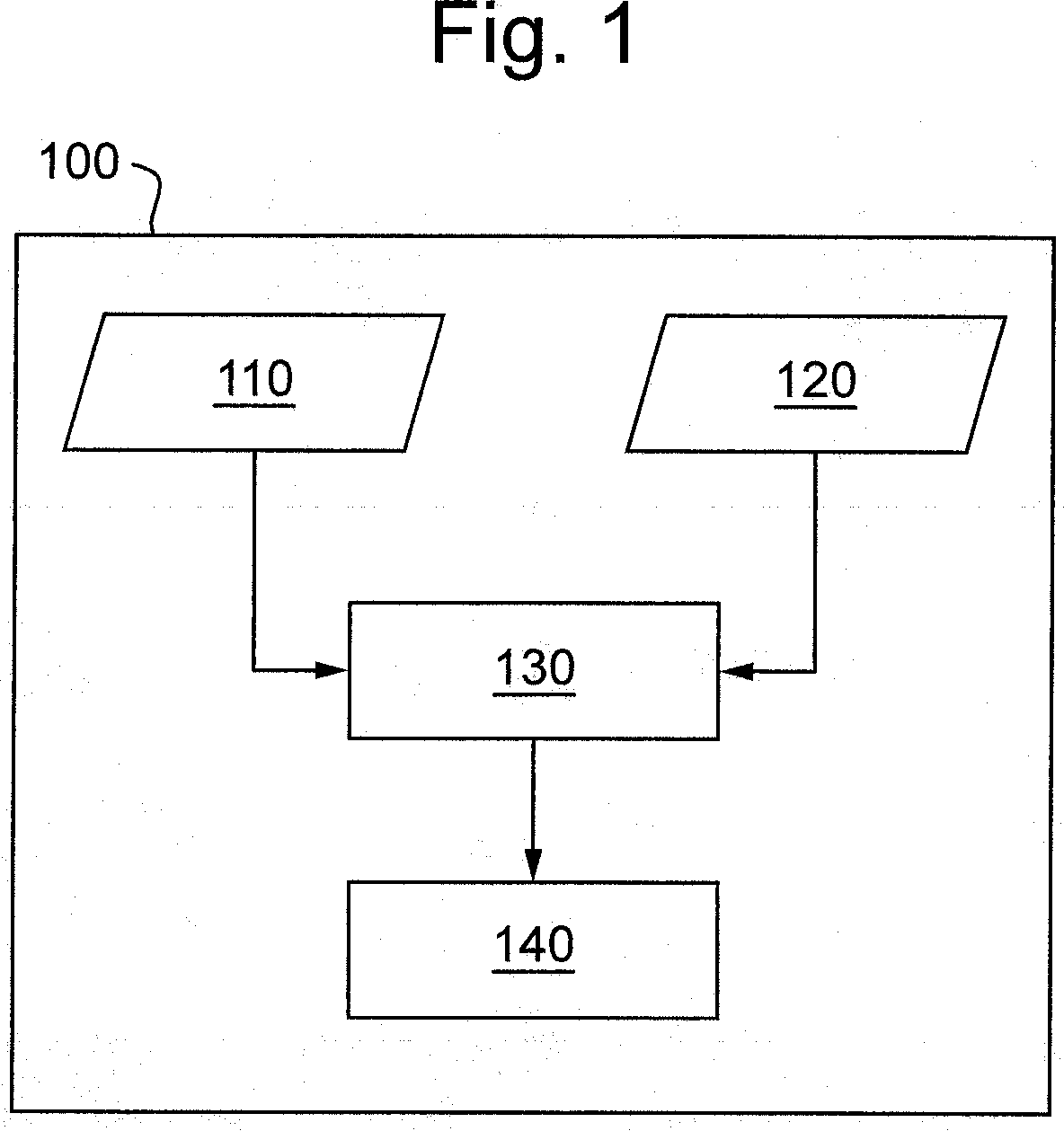
Diese Offenbarung betrifft ein Verfahren zum Positionieren eines Elektrofahrzeugs bezüglich eines Ladepunktes und betrifft insbesondere, jedoch nicht ausschließlich, das Positionieren eines Elektrofahrzeugs bezüglich eines induktiven Ladepunktes mithilfe eines korrigierten Signals des globalen Positionsbestimmungssystems. Elektrofahrzeuge, wie etwa Steckdosen-Elektrofahrzeuge (Plug-in-Elektrofahrzeuge), Steckdosen-Hybrid-Elektrofahrzeuge (Plug-in-Hybrid-Elektrofahrzeuge), batteriebetriebene Elektrofahrzeuge und Elektrofahrzeuge mit verlängerter Reichweite, verwenden eine oder mehrere Batterien, um den Antriebsstrang des Elektrofahrzeugs mit Energie zu versorgen. Typischerweise kann die elektrische Reichweite eines Elektrofahrzeugs durch die Kapazität der Batterien des Fahrzeugs begrenzt sein. Ein Elektrofahrzeug kann geladen werden, indem es an einen Ladepunkt angeschlossen wird, welcher sich an einem oder in der Nähe eines Stellplatzes auf einem Parkplatz befindet. Der Ladepunkt kann dafür ausgelegt sein, die Batterie mithilfe einer oder mehrerer physischer und/oder drahtloser Verbindungen zu laden. Zum Beispiel kann der Ladepunkt ein Ladekabel umfassen, welches in das Batteriesystem des Fahrzeugs gesteckt wird, und/oder ein induktives Ladesystem, in welchem Energie induktiv zwischen einem Ladefeld und einem mit diesem zusammenwirkenden Ladefeld am Fahrzeug übertragen wird. In manchen Situationen kann es für den Fahrer schwierig sein, das Fahrzeug bezüglich des Ladepunktes genau zu positionieren. Falls keine genaue Ausrichtung zwischen dem Fahrzeug und dem Ladepunkt erreicht wird, werden die Batterien des Fahrzeugs möglicherweise nicht auf die effizienteste Weise oder sogar überhaupt nicht geladen. Gemäß einem Aspekt der vorliegenden Erfindung wird ein Verfahren zum Positionieren eines Elektrofahrzeugs bezüglich eines Ladepunktes bereitgestellt, wobei das Verfahren umfasst: Empfangen eines Signals des globalen Positionsbestimmungssystems am Fahrzeug; Empfangen eines Korrektursignals des globalen Positionsbestimmungssystems am Fahrzeug; Korrigieren des Signals des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems; und Positionieren des Fahrzeugs bezüglich des Ladepunktes mithilfe des korrigierten Signals des globalen Positionsbestimmungssystems, so dass das Fahrzeug vom Ladepunkt geladen werden kann. Das Korrektursignal kann von einem stationären Referenzsender empfangen werden. Das Korrektursignal kann über ein Zellularnetz empfangen werden. Das Korrektursignal kann über eine drahtlose Internetverbindung empfangen werden. Das Korrektursignal kann über ein digitales Audiorundfunksignal empfangen werden. Das Verfahren kann das Bestätigen der Genauigkeit des Korrektursignals durch Vergleichen eines ersten Korrektursignals und eines zweiten Korrektursignals umfassen. Das erste Korrektursignal kann vom stationären Referenzsender und/oder über das Zellularnetz, die drahtlose Internetverbindung und/oder das digitale Audiorundfunksignal empfangen werden. Das zweite Korrektursignal kann vom stationären Referenzsender und/oder über das Zellularnetz, die drahtlose Internetverbindung und/oder das digitale Audiorundfunksignal empfangen werden. Das Verfahren kann das Senden von Positionsdaten vom Ladepunkt zum Fahrzeug umfassen. Das Fahrzeug kann eine Steuereinheit umfassen, die dafür ausgelegt ist, die Position des Ladepunktes mithilfe der Positionsdaten zu bestimmen, zum Beispiel die Position des Ladepunktes bezüglich des Fahrzeugs. Die Positionsdaten können Informationen hinsichtlich der Position des Ladepunktes innerhalb einer Stadt beinhalten. Die Positionsdaten können Informationen hinsichtlich der Position des Ladepunktes innerhalb einer einzelnen Stellfläche beinhalten. Die Positionsdaten können verwendet werden, um das Fahrzeug zum Ladepunkt zu führen. Das Verfahren kann das Positionieren des Fahrzeugs mithilfe eines automatischen Parkassistenzsystems des Fahrzeugs umfassen. Das automatische Parkassistenzsystem kann dafür ausgelegt sein, das Fahrzeug relativ zum Ladepunkt zu manövrieren und/oder dem Fahrer Anweisungen zu übermitteln. Das Verfahren kann ein Positionieren des Fahrzeugs bezüglich des Ladepunktes mithilfe des automatischen Parkassistenzsystems umfassen, so dass der Ladepunkt und das Fahrzeug funktionell verbunden werden können, um das Fahrzeug zu laden. Das Elektrofahrzeug kann innerhalb des Bereichs von ungefähr 0 bis 10 cm relativ zu einem Ladeabschnitt des Ladepunktes positioniert werden. Das Fahrzeug kann so positioniert werden, dass eine induktive Kopplung verwendet werden kann, um das Fahrzeug zu laden. Gemäß einem anderen Aspekt der vorliegenden Offenbarung wird ein Elektrofahrzeug bereitgestellt, welches umfasst: ein Empfängersystem, das dafür ausgelegt ist, ein Signal des globalen Positionsbestimmungssystems und ein Korrektursignal des globalen Positionsbestimmungssystems zu empfangen; und eine Steuereinheit, die dafür ausgelegt ist, das Signal des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems zu korrigieren, wobei das korrigierte Signal des globalen Positionsbestimmungssystems verwendet wird, um das Fahrzeug bezüglich eines Ladepunktes für Elektrofahrzeuge so zu positionieren, dass das Fahrzeug vom Ladepunkt geladen werden kann. Das Empfängersystem kann einen ersten Empfänger umfassen, der dafür ausgelegt ist, ein Signal des globalen Positionsbestimmungssystems zu empfangen. Das Empfängersystem kann einen zweiten Empfänger umfassen, der dafür ausgelegt ist, ein Korrektursignal des globalen Positionsbestimmungssystems zu empfangen. Das Empfängersystem kann einen einzigen Empfänger umfassen, der dafür ausgelegt ist, sowohl das Signal des globalen Positionsbestimmungssystems als auch das Korrektursignal des globalen Positionsbestimmungssystems zu empfangen. Das Elektrofahrzeug kann dafür ausgelegt sein, das Korrektursignal des globalen Positionsbestimmungssystems vom Ladepunkt zu empfangen. Das Elektrofahrzeug kann dafür ausgelegt sein, Positionsdaten vom Ladepunkt zu empfangen, so dass das Fahrzeug die Position des Ladepunktes bestimmen kann. Das Elektrofahrzeug kann ein automatisches Parkassistenzsystem umfassen, das dafür ausgelegt ist, das Fahrzeug mithilfe des korrigierten Signals des globalen Positionsbestimmungssystems bezüglich des Ladepunktes zu positionieren. Gemäß einem weiteren Aspekt der vorliegenden Offenbarung wird ein Elektrofahrzeug-Ladesystem bereitgestellt, welches umfasst: ein auf einem Elektrofahrzeug vorgesehenes Empfängersystem, wobei das Empfängersystem dafür ausgelegt ist, ein Signal des globalen Positionsbestimmungssystems und ein Korrektursignal des globalen Positionsbestimmungssystems zu empfangen; einen Ladepunkt, der dafür ausgelegt ist, das Elektrofahrzeug zu laden; und eine Steuereinheit, die dafür ausgelegt ist, das Signal des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems zu korrigieren, wobei das korrigierte Signal des globalen Positionsbestimmungssystems verwendet wird, um das Elektrofahrzeug bezüglich eines Ladepunktes für Elektrofahrzeuge so zu positionieren, dass das Fahrzeug vom Ladepunkt geladen werden kann. Das Elektrofahrzeug-Ladesystem kann einen stationären Referenzsender umfassen. Der stationäre Referenzsender kann dafür ausgelegt sein, das Korrektursignal des globalen Positionsbestimmungssystems zu senden. Der Ladepunkt kann den stationären Referenzsender umfassen. Die Offenbarung stellt außerdem Software, wie etwa ein Computerprogramm oder ein Computerprogrammprodukt, zum Ausführen beliebiger der hier beschriebenen Verfahren und ein computerlesbares Medium bereit, auf dem ein Programm zum Ausführen beliebiger der hier beschriebenen Verfahren gespeichert ist. Ein Computerprogramm, das die Offenbarung verkörpert, kann auf einem computerlesbaren Medium gespeichert sein, oder es könnte zum Beispiel in der Form eines Signals vorliegen, wie etwa als ein herunterladbares Datensignal, das von einer Internet-Website bereitgestellt wird, oder es könnte in einer beliebigen anderen Form vorliegen. Um unnötigen doppelten Aufwand und Textwiederholungen in der Beschreibung zu vermeiden, werden gewisse Merkmale nur in Bezug auf einen oder einige Aspekte oder Anordnungen der Offenbarung beschrieben. Es versteht sich jedoch, dass, wo dies technisch möglich ist, Merkmale, die in Bezug auf irgendeinen Aspekt oder irgendeine Anordnung der Offenbarung beschrieben sind, auch mit einem/einer beliebigen anderen Aspekt oder Anordnung der Offenbarung verwendet werden können. Kurzbeschreibung der Zeichnungen Zum besseren Verständnis der vorliegenden Offenbarung, und um klarer aufzuzeigen, wie sie verwirklicht werden kann, wird nun beispielhaft auf die beigefügten Zeichnungen Bezug genommen, wobei: Es kann ein auf dem globalen Positionsbestimmungssystem (Global Positioning System, GPS) basierendes Navigationsgerät verwendet werden, um einen Fahrer zu einem oder mehreren Orten zu leiten. Da die Reichweite eines Fahrzeugs durch die Menge an Kraftstoff begrenzt ist, die es an Bord mitführen kann, verwendet der Fahrer bekanntlich das GPS-Gerät, um eine Tankstelle zu finden. Insbesondere ist die elektrische Reichweite eines Elektrofahrzeugs durch die Kapazität der Batterien begrenzt, die verwendet werden, um das elektrische Antriebssystem des Fahrzeugs mit Energie zu versorgen. Daher wird es immer wichtiger in der Lage zu sein, elektrische Ladestationen genau zu lokalisieren. Die Positionsgenauigkeit eines standardmäßigen GPS-Navigationssystems ist jedoch typischerweise auf einen Bereich von ungefähr 10 bis 15 m begrenzt. Ein differentielles globales Positionsbestimmungssystem (DGPS) ist eine Verbesserung eines standardmäßigen GPS-Systems und kann die Positionsgenauigkeit von Navigationsanweisungen bis auf etwa 10 cm oder bis in einen Bereich von 2–3 cm verbessern, in Abhängigkeit von der Konfiguration des DGPS-Systems. Das DPGS-System verwendet ein Netz von festen, bodenbasierten Referenzstationen, welche die Differenz zwischen den vom GPS-Satelliten angezeigten Positionen und den bekannten festen Positionen der Referenzstation rundsenden. Auf diese Weise ist die DPGS-Referenzstation in der Lage, ein Korrektursignal rundzusenden, welches verwendet werden kann, um die Positionsgenauigkeit des standardmäßigen GPS-Signals zu verbessern. Die Das Verfahren 100 umfasst einen Schritt 110 des Empfangens eines GPS-Signals mithilfe eines ersten Empfängers des Fahrzeugs 103. In den Das Verfahren 100 umfasst einen Schritt 120 des Empfangens eines GPS-Korrektursignals mithilfe eines zweiten Empfängers des Elektrofahrzeugs 103. Das GPS-Signal und das GPS-Korrektursignal können jedoch auch durch denselben Empfänger empfangen werden. Bei der in den Wenn das Elektrofahrzeug 103 mit einem DAB-System ausgerüstet ist, kann das DAB-System dafür ausgelegt sein, eine DAB-Datenübertragung auf einem beliebigen Kanal zu übertragen, welcher geeignet ist, DGPS-Daten zu transportieren. Die DGPS-Daten können auf einem Kanal gesendet werden, der auch Daten zum Beispiel mit Bezug auf Musik enthält. Dies ermöglicht eine flexible Nutzung eines existierenden DAB-Systems des Fahrzeugs. Das Verfahren 100 umfasst den Schritt 130 des Korrigierens des GPS-Signals mithilfe des GPS-Korrektursignals. Die Korrektur des GPS-Signals kann von einer Steuereinheit des Elektrofahrzeugs 103 ausgeführt werden, zum Beispiel von einer oder mehreren vorhandenen elektronischen Steuereinheiten (Electronic Control Unit, ECU) des Elektrofahrzeugs 103. Zusätzlich oder alternativ kann die Steuereinheit eine Nachrüst-Steuereinheit sein, die in das Fahrzeug 103 zum Zwecke des Korrigierens des GPS-Signals mithilfe des GPS-Korrektursignals eingebaut wurde. Auf diese Weise kann die Position des Elektrofahrzeugs 103 mit einer Genauigkeit von ungefähr 10 cm bestimmt werden. Bei der in Um sicherzustellen, dass das korrigierte GPS-Signal genau ist, kann das Verfahren 100 ferner einen Schritt des Bestätigens der Genauigkeit des Korrektursignals umfassen, um sicherzustellen, dass Fehler bei der Übertragung von differentiellen Korrekturen, die vom stationären Referenzsender 109 berechnet wurden, minimiert werden. Zum Beispiel kann das Verfahren einen Schritt des Vergleichens eines ersten Korrektursignals, das vom stationären Referenzsender 109 empfangen wurde, und eines zweiten Korrektursignals, das von einem anderen stationären Referenzsender und/oder über das Zellularnetz, die drahtlose Internetverbindung und/oder das DAB-Signal empfangen wurde, umfassen. Auf diese Weise kann das Elektrofahrzeug-Ladesystem 101 bestimmen, ob irgendeine Diskrepanz zwischen dem ersten Korrektursignal und dem zweiten Korrektursignal vorhanden ist. Falls eine Diskrepanz zwischen dem ersten und dem zweiten Korrektursignal bestimmt wird, kann eine Steuereinheit des Elektrofahrzeug-Ladesystems 101 dafür ausgelegt sein, ein oder mehrere weitere Korrektursignale von einem weiteren stationären Referenzsender und/oder über das Zellularnetz, die drahtlose Internetverbindung und/oder das DAB-Signal anzufordern. Sobald das GPS-Signal mithilfe des GPS-Korrektursignals korrigiert worden ist, kann das Elektrofahrzeug 103 mithilfe des korrigierten GPS-Signals bezüglich des Ladepunktes so positioniert werden, dass das Elektrofahrzeug 103 vom Ladepunkt 105 geladen werden kann. Beim Ausführen von Schritt 140 des Positionierens des Elektrofahrzeugs 103 bezüglich des Ladepunktes 105 ist es wichtig, ein korrigiertes GPS-Signal zu verwenden, da eine Fehlausrichtung zwischen jeweiligen Abschnitten des Elektrofahrzeugs 103 und des Ladepunktes 105 zur Folge haben kann, dass sich die Effizienz der Energieübertragung verringert oder das Elektrofahrzeug 103 und der Ladepunkt 105 überhaupt nicht elektrisch verbunden werden können. Während eine Positionsgenauigkeit, zum Beispiel innerhalb von 10 cm, möglicherweise nicht so wichtig ist, wenn ein Bediener ein Kabel vom Ladepunkt manuell mit dem Elektrofahrzeug 103 verbindet, ist die Positionsgenauigkeit des Elektrofahrzeugs 103 bezüglich des Ladepunktes 105 für moderne Ladesysteme wichtig. Wenn der Ladepunkt 105 ein induktives Ladesystem umfasst, ist es für einen Fahrer des Fahrzeugs 103 schwierig, das Fahrzeug 103 genau zu manövrieren und über einer Induktionsladespule zu positionieren, insbesondere da es üblich ist, dass Ladespulen am Boden und folglich unter dem Fahrzeug 103 positioniert sind, wenn sich das Fahrzeug 103 der Ladespule nähert. Falls keine genaue Ausrichtung zwischen der Ladespule des Ladepunktes 105 und der entsprechenden Spule am Elektrofahrzeug 103 erzielt wird, können beträchtliche Energieverluste bei der Übertragung von Energie zwischen den zwei Induktionsspulen auftreten, zum Beispiel infolge eines großen Luftspalts. Solche Energieverluste können zu erhöhten Kosten des Ladens des Batteriesystems des Elektrofahrzeugs 103 und/oder einer verlängerten Ladezeit infolge der verminderten Ladeeffizienz führen. Zusätzlich oder alternativ kann der Ladepunkt 105 ein Robotersystem umfassen, das dafür ausgelegt ist, einen Abschnitt des Ladepunktes bezüglich des Elektrofahrzeugs 103 zu positionieren. Zum Beispiel kann der Ladepunkt 105 einen Roboterarm umfassen, welcher sich vom Ladepunkt 105 aus erstreckt, um ein Ladekabel mit einem Verbinder am Elektrofahrzeug 103 zu koppeln. Jede Fehlausrichtung zwischen dem elektrischen Verbinder am Elektrofahrzeug 103 und dem Roboterarm des Ladepunktes 105 kann daher zur Folge haben, dass das Kabel des Ladepunktes 105 nicht mit dem elektrischen Verbinder des Elektrofahrzeugs 103 verbunden wird. Es ist daher vorteilhaft, ein System 101 und ein Verfahren 100 zum genauen Positionieren des Elektrofahrzeugs 103 bezüglich des Ladepunktes 105 vorzusehen, zum Beispiel innerhalb des Bereichs von ungefähr 2 bis 10 cm, so dass das Elektrofahrzeug 103 vom Ladepunkt 105 auf die effizienteste Weise geladen werden kann. Typischerweise sind Daten, welche die Position des Ladepunktes 105 betreffen, in das GPS-Navigationssystem des Elektrofahrzeugs 103 geladen, so dass die Position des Elektrofahrzeugs 103 mit derjenigen des Ladepunktes 105 verglichen werden kann. Möglicherweise ist jedoch die Position des Ladepunktes 105 nicht in das GPS-Navigationssystem des Elektrofahrzeugs 103 hochgeladen worden. Selbst wenn die Position des Ladepunktes 105 in das Navigationssystem des Elektrofahrzeugs 103 hochgeladen worden ist, kann sich die Position des Ladepunktes 105 verändert haben, seit die Positionsdaten in das Navigationssystem des Elektrofahrzeugs hochgeladen wurden. Das Verfahren 100 kann ferner einen Schritt des Sendens von Positionsdaten vom Ladepunkt 105 an das Elektrofahrzeug 103 umfassen, so dass das Fahrzeug 103 die Position des Ladepunktes 105 bestimmen kann. Zum Beispiel kann der Ladepunkt 105 einen Satz von Koordinaten senden, welche den Ladepunkt 105 auf einer Karte relativ zum Elektrofahrzeug 103 verorten. Auf diese Weise ist es nicht notwendig, das Navigationssystem des Elektrofahrzeugs 103 jedes Mal zu aktualisieren, wenn ein neuer Ladepunkt bereitgestellt und/oder ein vorhandener Ladepunkt 105 bewegt wird. Der Schritt des Sendens von Positionsdaten vom Ladepunkt aus kann besonders vorteilhaft sein, wenn der Ladepunkt 105 ein beweglicher Ladepunkt ist. Wie oben erläutert, kann es für einen Fahrer schwierig sein, das Fahrzeug 103 bezüglich des Ladepunktes 105 genau zu positionieren, besonders wenn dem Fahrer des Fahrzeugs 103 die Sicht auf den Ladepunkt 105 versperrt ist. Das Verfahren 100 kann das Positionieren des Elektrofahrzeugs 103 mithilfe eines automatisierten Einparksystems des Elektrofahrzeugs 103 umfassen. Zum Beispiel kann das korrigierte GPS-Signal vom automatisierten Einparksystem verwendet werden, um das Fahrzeug 103 bezüglich des Ladepunktes 105 zu positionieren. Auf diese Weise kann das Fahrzeug 103 automatisch oder wenigstens teilweise automatisch positioniert werden, um eine genaue Ausrichtung zwischen dem Ladeverbinder des Elektrofahrzeugs und dem Ladepunkt 105 zu erzielen. Es wird auf Der zentrale Server kann in der Nähe des Ladepunktes 105 angeordnet sein und/oder kann als Teil des Ladepunktes 105 vorgesehen sein. Auf diese Weise kann das GPS-Navigationssystem des Elektrofahrzeugs 103 verwendet werden, um das Fahrzeug in die Nähe des Ladepunktes 105 zu leiten, so dass zum Beispiel der Abstand nicht größer als 10 m ist, und danach kann das korrigierte GPS-Signal verwendet werden, um das Elektrofahrzeug 103 bezüglich eines Abschnitts des Ladepunktes 105 genau zu positionieren, zum Beispiel in einem Abstand von 2 bis 10 cm von einem Abschnitt des Ladepunktes. Ein solcher Aufbau kann besonders vorteilhaft auf einem Autoparkplatz sein, der mehrere Ladepunkte umfasst. Zum Beispiel kann, wenn sich das Elektrofahrzeug 103 dem Parkplatz nähert, das korrigierte GPS-Signal durch das Elektrofahrzeug 103 empfangen werden, und das automatisierte Einparksystem kann verwendet werden, um das Fahrzeug 103 bezüglich eines Abschnitts des Ladepunktes 105 zu positionieren. Das Elektrofahrzeug-Ladesystem 101 kann derart ausgelegt sein, dass das korrigierte GPS-Signal nicht kontinuierlich durch das Elektrofahrzeug 103 empfangen wird und stattdessen erst empfangen wird, wenn sich das Elektrofahrzeug 103 in der Nähe des Ladepunktes 105 befindet. Für Fachleute ist leicht einzusehen, dass die Offenbarung, obwohl sie beispielhaft unter Bezugnahme auf eine oder mehrere Anordnungen beschrieben wurde, nicht auf die offenbarten Anordnungen beschränkt ist, und dass alternative Anordnungen konstruiert werden könnten, ohne den Schutzbereich der Offenbarung, wie er in den beigefügten Ansprüchen definiert ist, zu verlassen. Verfahren (100) zum Positionieren eines Elektrofahrzeugs (103) bezüglich eines Ladepunktes (105), wobei das Verfahren (100) umfasst: Empfangen eines Signals des globalen Positionsbestimmungssystems am Fahrzeug (103); Empfangen eines Korrektursignals des globalen Positionsbestimmungssystems am Fahrzeug (103); Korrigieren des Signals des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems; Positionieren des Fahrzeugs (103) bezüglich des Ladepunktes (105) mithilfe des korrigierten Signals des globalen Positionsbestimmungssystems, so dass das Fahrzeug (103) vom Ladepunkt (105) geladen werden kann. Verfahren zum Positionieren eines Elektrofahrzeugs bezüglich eines Ladepunktes, wobei das Verfahren umfasst: Verfahren gemäß Anspruch 1, wobei das Korrektursignal von einem stationären Referenzsender und/oder über ein Zellularnetz, eine drahtlose Internetverbindung und/oder ein digitales Audiorundfunksignal empfangen wird. Verfahren gemäß Anspruch 1 oder 2, wobei das Verfahren ferner das Bestätigen der Genauigkeit des Korrektursignals durch Vergleichen eines ersten Korrektursignals und eines zweiten Korrektursignals umfasst. Verfahren gemäß einem der vorstehenden Ansprüche, wobei das Verfahren ferner das Empfangen von Positionsdaten hinsichtlich der Position des Ladepunktes am Fahrzeug umfasst, so dass das Fahrzeug die Position des Ladepunktes bestimmen kann. Verfahren gemäß Anspruch 4, wobei die Positionsdaten vom Ladepunkt gesendet werden. Verfahren gemäß einem der vorstehenden Ansprüche, wobei das Verfahren ferner das Positionieren des Fahrzeugs mithilfe eines automatischen Parkassistenzsystems des Fahrzeugs umfasst. Verfahren gemäß einem der vorstehenden Ansprüche, wobei das Elektrofahrzeug innerhalb des Bereichs von ungefähr 0 bis 10 cm relativ zum Ladepunkt positioniert wird. Elektrofahrzeug, welches umfasst: Elektrofahrzeug gemäß Anspruch 8, wobei das Elektrofahrzeug dafür ausgelegt ist, das Korrektursignal des globalen Positionsbestimmungssystems vom Ladepunkt zu empfangen. Elektrofahrzeug gemäß Anspruch 8 oder 9, wobei das Elektrofahrzeug dafür ausgelegt ist, Positionsdaten zu empfangen, so dass das Fahrzeug die Position des Ladepunktes bestimmen kann. Elektrofahrzeug gemäß einem der Ansprüche 8 bis 10, wobei das Fahrzeug ein automatisches Parkassistenzsystem umfasst, das dafür ausgelegt ist, das Fahrzeug mithilfe des korrigierten Signals des globalen Positionsbestimmungssystems bezüglich des Ladepunktes zu positionieren. Elektrofahrzeug-Ladesystem, welches umfasst: Elektrofahrzeug-Ladesystem gemäß Anspruch 12, wobei das Elektrofahrzeug-Ladesystem ferner einen stationären Referenzsender umfasst, der dafür ausgelegt ist, das Korrektursignal des globalen Positionsbestimmungssystems zu senden. Elektrofahrzeug-Ladesystem gemäß Anspruch 13, wobei der Ladepunkt den stationären Referenzsender umfasst. Software, welche, wenn sie von einer Rechenvorrichtung ausgeführt wird, bewirkt, dass die Rechenvorrichtung das Verfahren gemäß einem der Ansprüche 1 bis 7 ausführt. Verfahren, wie hier unter Bezugnahme auf die beigefügten Zeichnungen beschrieben und in diesen dargestellt. Elektrofahrzeug und/oder Elektrofahrzeug-Ladesystem, wie hier unter Bezugnahme auf die beigefügten Zeichnungen beschrieben und in diesen dargestellt.Einleitung
Angaben zur Erfindung
Ausführliche Beschreibung
Empfangen eines Signals des globalen Positionsbestimmungssystems am Fahrzeug;
Empfangen eines Korrektursignals des globalen Positionsbestimmungssystems am Fahrzeug;
Korrigieren des Signals des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems; und
Positionieren des Fahrzeugs bezüglich des Ladepunktes mithilfe des korrigierten Signals des globalen Positionsbestimmungssystems, so dass das Fahrzeug vom Ladepunkt geladen werden kann.
ein Empfängersystem, das dafür ausgelegt ist, ein Signal des globalen Positionsbestimmungssystems und ein Korrektursignal des globalen Positionsbestimmungssystems zu empfangen; und
eine Steuereinheit, die dafür ausgelegt ist, das Signal des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems zu korrigieren, wobei das korrigierte Signal des globalen Positionsbestimmungssystems verwendet wird, um das Fahrzeug bezüglich eines Ladepunktes für Elektrofahrzeuge so zu positionieren, dass das Fahrzeug vom Ladepunkt geladen werden kann.
ein auf einem Elektrofahrzeug vorgesehenes Empfängersystem, wobei das Empfängersystem dafür ausgelegt ist, ein Signal des globalen Positionsbestimmungssystems und ein Korrektursignal des globalen Positionsbestimmungssystems zu empfangen;
einen Ladepunkt, der dafür ausgelegt ist, das Elektrofahrzeug zu laden; und
eine Steuereinheit, die dafür ausgelegt ist, das Signal des globalen Positionsbestimmungssystems mithilfe des Korrektursignals des globalen Positionsbestimmungssystems zu korrigieren, wobei das korrigierte Signal des globalen Positionsbestimmungssystems verwendet wird, um das Elektrofahrzeug bezüglich eines Ladepunktes für Elektrofahrzeuge so zu positionieren, dass das Fahrzeug vom Ladepunkt geladen werden kann.