Architekturen und Verfahren zur Verwaltung von Fahrzeuginternen vernetzten Steuerungen und Vorrichtungen
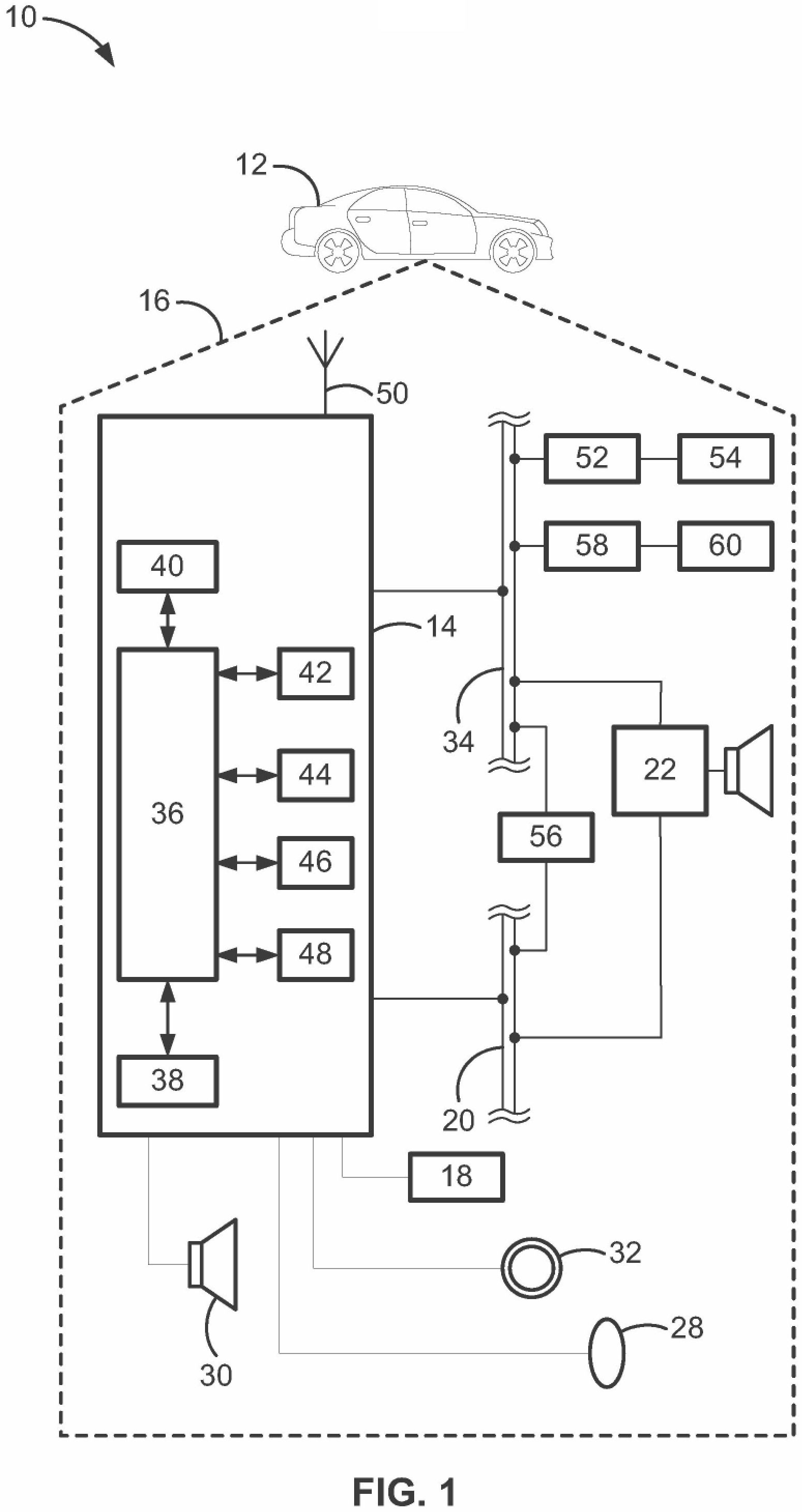
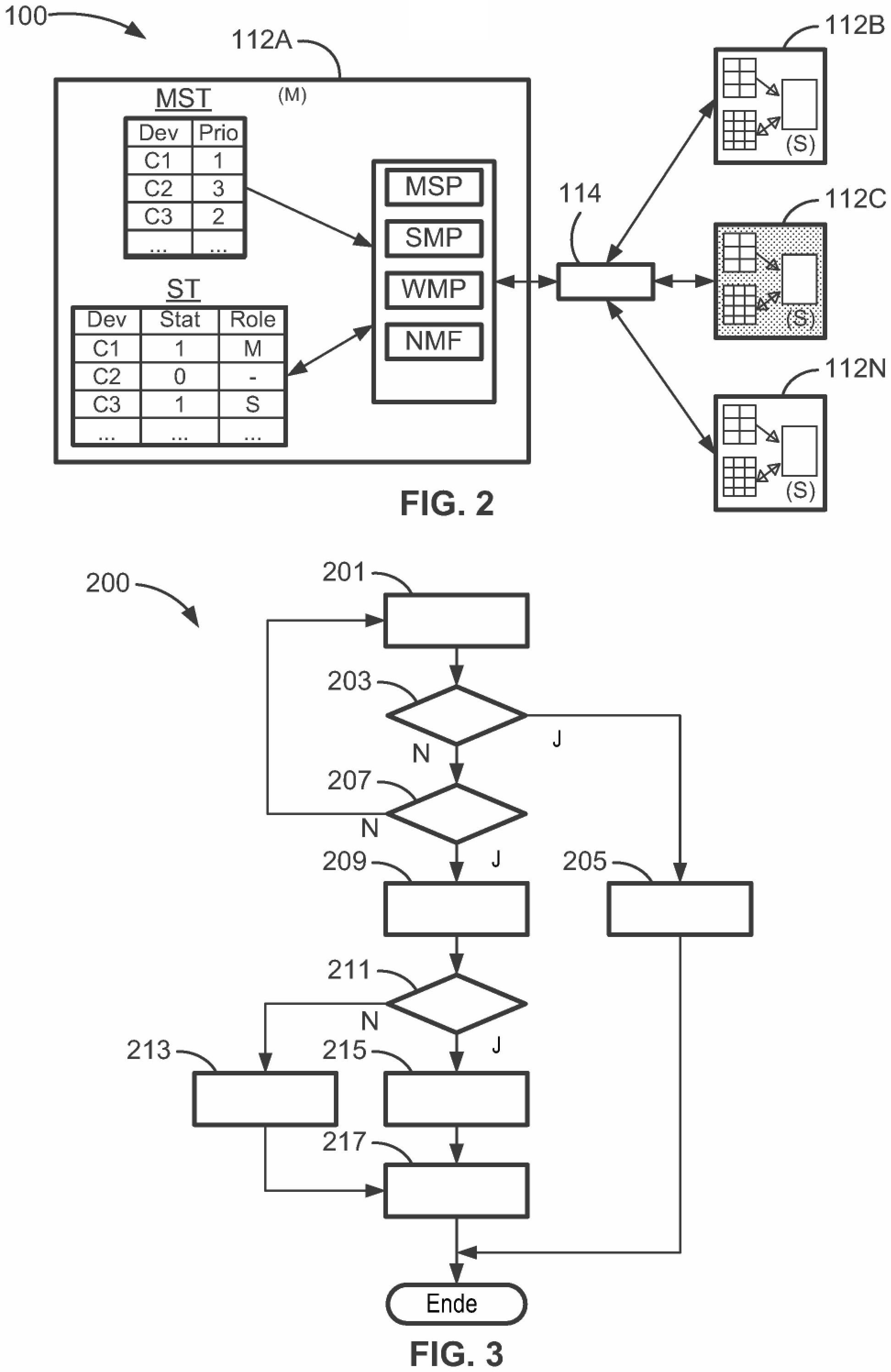
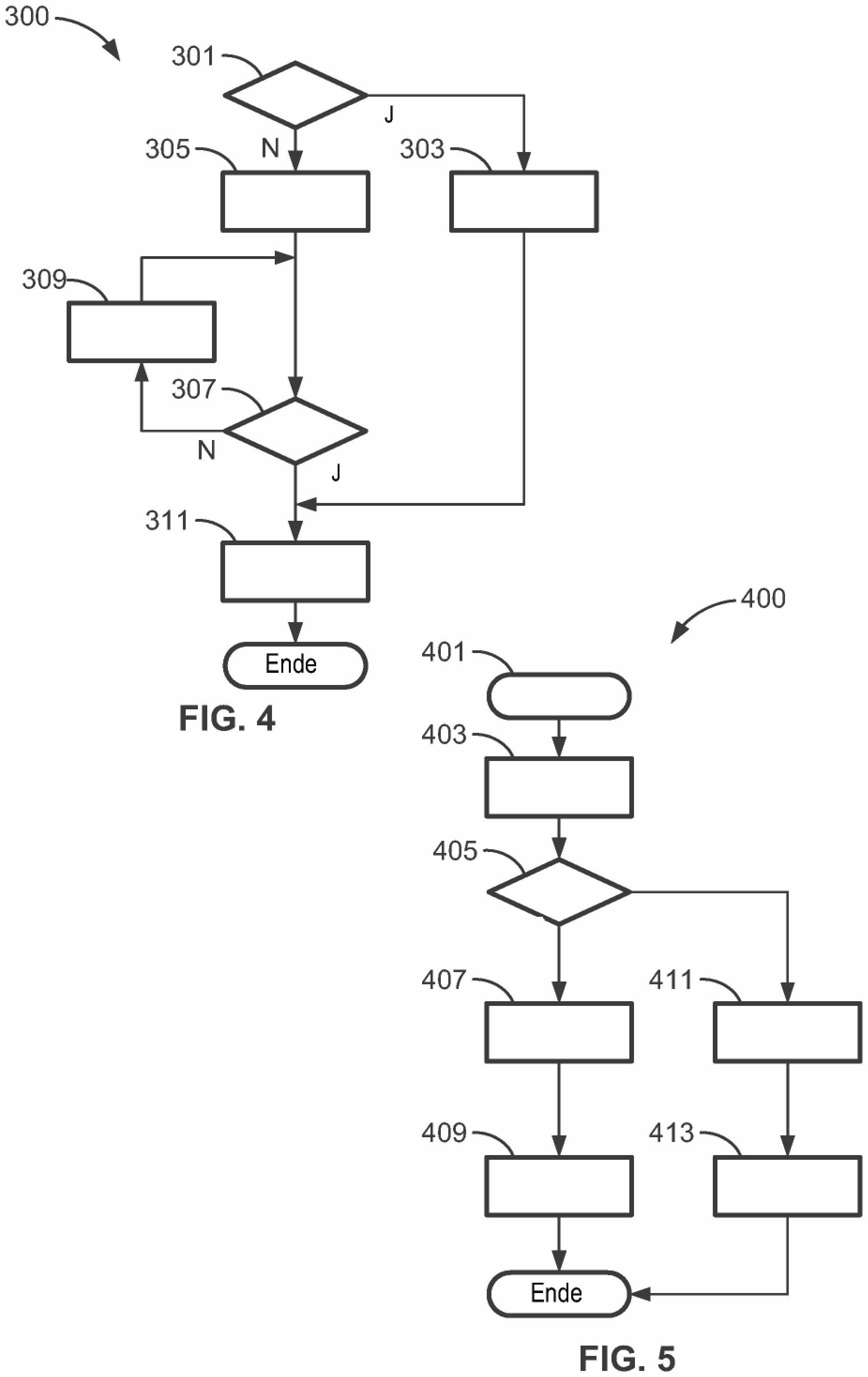
Die vorliegende Offenbarung betrifft im Allgemeinen Netzwerke von elektronischen Steuerungen und Datenverarbeitungsvorrichtungen. Genauer gesagt, beziehen sich die Aspekte dieser Offenbarung auf Systemarchitekturen und Steuerlogik für das Sleep/Wakeup-Management von vernetzten Steuerungen und Vorrichtungen, die eine verteilte Steuerung von Fahrzeugfunktionen ermöglichen. Aktuelle Serienfahrzeuge, wie das moderne Automobil, sind ursprünglich mit einem Netzwerk von elektronischen Steuervorrichtungen und Rechenvorrichtungen ausgestattet, die über das gesamte Fahrzeug verteilt sind, um verschiedene Fahrzeugfunktionen ausführen zu können. Diese Fahrzeugfunktionen, ob bedienergesteuert oder automatisiert, können die Steuerung von Fahrzeugtürschlössern, Sitzposition, Tempomat, Komponenten des Unterhaltungssystems, Heizungslüftung und Klimaanlage (HVAC), Scharfschaltung und Entschärfung von Diebstahlschutzalarmen, Innen- und Außenbeleuchtung, Antriebsstrangbetrieb und Systemdiagnose, elektrische Fensterheberposition sowie weitere Funktionen beinhalten. Obwohl einige elektronische Onboard-Steuergeräte (ECU), wie beispielsweise Motorsteuerungsmodule (ECM) und Bremssystem-Steuerungsmodule (BCM), für die Steuerung eines einzelnen Subsystems vorgesehen sind, arbeiten die meisten anderen Steuergeräte in interoperablen Gruppen zur Steuerung des Fahrzeugbetriebs. Viele Aufgaben der Fahrzeugsteuerung werden von mehreren ECUs übernommen, die gemeinsam arbeiten und ihren Betrieb über eine Datenverbindung koordinieren. Ein herkömmliches ECU kann beispielsweise einen Teil der Steuerlogik für mehrere unabhängige Fahrzeugsteuerungsaufgaben enthalten, jedoch nicht die komplette Steuerlogik für eine einzelne Steueraufgabe. Fahrzeuginterne ECUs sind typischerweise über einen Netzwerkkommunikationsbus miteinander verbunden, der einzeln oder als serielle Kommunikationsschnittstelle in Form eines Local Area Network (LAN) realisiert werden kann. Die Kommunikationstopologie kann durch Gateway-/Brückenvorrichtungen, wie beispielsweise Ethernet-Switches, unterstützt werden. Neben der notwendigen Hardware für die Signalübertragung zwischen vernetzten ECUs wird ein zuverlässiges Kommunikationsprotokoll implementiert, um sicherzustellen, dass Primär- und Nebenaufgaben synchron ausgeführt werden können. Eine dieser Aufgaben ist das Netzwerkmanagement zur Bereitstellung einer systemweiten gemeinsamen Methodik für die Behandlung von Ereignissen wie: geordnete Inbetriebnahme (Aktivierung) der Kommunikationsfähigkeiten; geordnete Abschaltung (Deaktivierung) der Kommunikationsfähigkeiten und vorhersagbare Wiederherstellung von erkennbaren Kommunikationsfehlern. Ein geordnetes Hoch- und Herunterfahren trägt dazu bei, dass ECUs ihre Signalempfangserwartungen mit der Verfügbarkeit von Signalübertragungen anderer ECUs synchronisieren können. Wenn keine Synchronisation stattfindet, kann ein ECU die fehlende Signalübertragung als falsch-positiven Ausfall eines der anderen ECUs interpretieren und kann sichere Standardsignalwerte übernehmen. Um den Stromverbrauch in bestehenden elektrischen Infrastrukturen von Fahrzeugen zu reduzieren, können ECUs, die die Fahrzeugfunktionalität nicht aktiv steuern, vorübergehend in einen stromsparenden „Standby“- oder „Sleep“-Zustand versetzt werden. So können beispielsweise elektrische Fensterheber- und Sitzsteuer-ECUs, die im Vergleich zu anderen Steuerungen nur selten eingesetzt werden, in der Regel im Standby-Modus gewartet werden. Bestehende Fahrzeugnetzwerk-Management-Strategien erfordern oft, dass alle ECUs einer bestimmten Gruppe gleichzeitig aktiviert („wach“) und deaktiviert („schlafend“) werden. In einem „Master-Slave“-Fahrzeugnetzwerk werden zum Beispiel fahrzeuginterne Vorrichtungen zu virtuellen Gruppen zusammengefasst, wobei für jede Gruppe von berechtigten Vorrichtungen ein einzelnes ECU als „Master“ zugeordnet wird. Das Master-ECU kann eine unidirektionale Steuerung über die verbleibenden „Slave“-ECUs in der Gruppe aufweisen, einschließlich der Fähigkeit, jedes Slave-ECU zu aktivieren oder zu deaktivieren. Bei derartigen Systemen synchronisiert das Master-ECU das An- und Abschalten aller Assets, die der jeweiligen Gruppe zugeordnet sind. Robuste Netzwerk-Designs sind in der Regel in der Lage, ECU-Einstellungen auf Abruf zu starten, ohne dass die Steuerungsvorgänge der bereits aktivierten ECUs unterbrochen werden. Hierin offenbart sind Steuerungsalgorithmen und Systemarchitekturen zur Verwaltung des Deaktivierens und Aktivierens von fahrzeuginternen vernetzten Steuerungen und Vorrichtungen, Verfahren zur Implementierung und Verfahren zur Konstruktion solcher Algorithmen/Architekturen und Kraftfahrzeuge, die mit einem Bordnetz aus elektronischen Steuergeräten (ECU) und Steuerlogik zur Steuerung des Zu- und Abschaltens dieser vernetzten ECUs ausgestattet sind. Als Beispiel und nicht als Einschränkung wird eine Architektur mit Diensten und Protokollen vorgestellt, um die einzelnen, vernetzten Steuerungen und Vorrichtungen dynamisch zu verwalten, die in den Ruhezustand eintreten und in den Normalbetriebsmodus übergehen. Die Architektur nimmt eine Master-Slave-Beziehung für die Vorrichtungen an, wobei eine primäre Master-Vorrichtung periodisch Netzwerk-Management-Frame-Prompts über Multicast-Verteilung sendet. In diesem Fall ist der Master auch dafür verantwortlich, zu genehmigen, welche Vorrichtung(n) in den Ruhezustand versetzt werden können, und kann auch so betrieben werden, dass Slave-Vorrichtungen im Ruhezustand zum Aktivieren aufgefordert werden. Der Ruhezustand und Variationen desselben, wie beispielsweise Sleeping, Snoozing, asleep usw., können als reduzierter „niedriger“-Leistungsmodus im Vergleich zum normalen Betriebsmodus bezeichnet werden; der Ruhezustand ist kein Aus-Zustand, der einen Neustart der Vorrichtung bevor sie voll funktionsfähig wird. Eine Vorrichtung verbraucht während des Ruhezustands etwas Energie, z. B. um den lokalen Speicher zu versorgen und auf ein Aufweckereignis reagieren zu können. Alle Vorrichtungen, einschließlich des Masters und aller Slave-Vorrichtungen, können basierend auf den einzelnen Betriebszuständen in den Ruhezustand versetzt oder aktiviert werden. Im Allgemeinen fragt eine Slave-Vorrichtung den Master nach der Genehmigung einer Änderungsanforderung für den Ruhe-zu-Aktiv- oder für den Aktiv-zu-Ruhe-Modus. Wenn eine Master-Vorrichtung in den Ruhezustand versetzt wird oder wenn eine ruhende Vorrichtung aktiviert wird, kann über ein Master-Auswahlprotokoll ein neuer Master ausgewählt werden. Die Architektur verweist auf eine Master-Auswahltabelle, die als Kalibrierungswerte auf einer oder mehreren Vorrichtungen gespeichert wird und definiert eine Rangfolge (Hierarchie) der als Master zu bezeichnenden Vorrichtungen. Eine Status-Tabelle dient gleichzeitig dazu, den Sleep/Wake-Status jeder einzelnen Vorrichtung und deren aktuelle Rolle (Master oder Slave) zu verfolgen. Neben den normalen Kommunikations- und Verwaltungsrahmen können zwei Arten von Netzwerkrahmen verwendet werden, um Informationen für die Aktualisierung der jeweiligen Zustände jeder Vorrichtung zu übertragen, um eine konsistente Sicht auf die Vorrichtungen im Netzwerk aufrechtzuerhalten und um den Ruhezustand und die Aktivierungsfunktion zu verwalten. Ein Netzwerk-Management-Frame (NMF) wird von einer Master-Vorrichtung gesendet und enthält Master-Informationen mit einem Source-Identifier und einem Datenfeld, das anzeigt, welche Vorrichtungen sich im Ruhezustand befinden und welche unter Verwendung eines Bit-Vektors aktiviert werden, z. B. mit Bit = 0 ruhend und Bit = 1 für das Aktivieren. Ein NMF wird an alle aktiven Geräte gesendet, und alle Slave-Vorrichtungen aktualisieren ihre Status-Tabelle entsprechend. Ein Request-Frame (REQ) wird von einer Slave-Vorrichtung oder einer aktiven Vorrichtung verwendet, um eine Anfrage zu senden. Ein REQ wird beispielsweise verwendet, wenn das Netzwerk mit der Auswahl eines Masters beginnt und eine Slave-Vorrichtung sich entschließt in den Ruhezustand überzugehen. Für die Zwecke dieser Offenbarung können die Begriffe „Steuerung“ und „ECU“ und „Vorrichtung“ austauschbar verwendet werden, sofern nicht ausdrücklich darauf verzichtet wird. Das Protokoll für die Masterauswahl wird zum Beispiel aufgerufen, wenn eine Vorrichtung in einer Gruppe aktiviert wird - die Aufwachvorrichtung wartet auf NMF, um anzuzeigen, ob das Netzwerk läuft und ein Master vorhanden ist. Wenn die Vorrichtung den NMF empfängt, führt er Wakeup-Management-Protokoll aus, um sich dem Netzwerk zu verbinden. Wenn der NMF nicht vor der Zeitüberschreitung ankommt, geht die Vorrichtung davon aus, dass das Netzwerk nicht läuft und befördert sich selbst zum Master. Das Master-Auswahlprotokoll wird dann aufgerufen, um eine Vorrichtung mit der höchsten Priorität als Master auszuwählen. Wenn eine Slave-Vorrichtung keine Aktivität aufweist und in den Ruhestand möchte, ruft es ein Sleep-Management-Protokoll auf und sendet einen REQ zur Genehmigung an die Master-Vorrichtung. Wenn die Master-Vorrichtung im nächsten NMF mit einem entsprechenden Statusvektorbit im Ruhezustand bestätigt, kann die Vorrichtung in den Ruhezustand übergehen; andernfalls bleibt die Vorrichtung bis zum Empfang des NMF mit dem Statusvektorbit im Ruhezustand aktiv. Entscheidet sich der Master dafür, zu schlafen, sendet der Master ein NMF mit eingeschaltetem Bit und aktiviert eine oder mehrere Vorrichtungen und/oder aktive Slaves durchlaufen den Master-Auswahlprozess. Wenn eine Vorrichtung aktiviert wird und den NMF empfängt, ruft sie das Wakeup-Management-Protokoll auf, um zu ermitteln, ob es eine höhere Priorität als der aktuelle Master aufweist. Wenn ja, übernimmt er die Rolle des Masters und sendet mit dieser Information ein NMF aus; der alte Master wird dann zum Slave, wenn er das neu gesendete NMF empfängt. Zu den Vorteilen für zumindest einige der offenbarten Konzepte gehört ein flexibles, nicht festes Master-Slave-Architekturdesign von vernetzten Steuerungen, das es jeder vernetzten Vorrichtung ermöglicht, bei Bedarf zu aktivieren (oder abzuschalten), ohne alle anderen Vorrichtungen aufwecken (oder auszuschalten) zu müssen. Offenbarte Systeme, Verfahren und Vorrichtungen ermöglichen es, die Bezeichnung und die damit verbundene Funktionalität einer Master-Vorrichtung auf andere Vorrichtungen innerhalb einer bestimmten Gruppe zu übertragen, wodurch die Netzwerkkonfiguration flexibler und energieeffizienter wird. Andere damit verbundene Vorteile können die Abschwächung oder anderweitige Verhinderung eines Netzwerkausfalls bei Ausfall einer Master-Vorrichtung sein, wodurch die Verfügbarkeit und Zuverlässigkeit des Systems verbessert wird. Alle Vorrichtungen einer Gruppe können so ausgelegt sein, dass sie dieselben Kalibrierungstabellen verwenden, um die Prioritäten der Hauptvorrichtungen zu ermitteln und dieselben Algorithmen auszuführen, so dass das gesamte Systemdesign vereinfacht und die Kommunikationsprotokolle auf Geschwindigkeit optimiert werden. Offenbarte Konzepte können in Anwendungen außerhalb von Fahrzeugsystemen, wie Massendatenspeicherung, Cloud Computing, Internet of Things (IoT) und andere Computernetzwerkarchitekturen, integriert werden. Aspekte der vorliegenden Offenbarung richten sich auf Steuerlogik und computerausführbare Algorithmen zur Verwaltung des Betriebs von vernetzten Steuerungen und Vorrichtungen. Offenbart wird zum Beispiel ein Verfahren zur Verwaltung eines Bordnetzes von ECUs eines Kraftfahrzeugs. Eine Gruppe der fahrzeugseitigen ECUs ist über eine Kommunikationsschnittstelle, wie beispielsweise einen Ethernet-Switch, miteinander verbunden und kann jeweils zum Übergang zwischen Ruhe- und Aktivzustand betrieben werden. Dieses Verfahren beinhaltet in beliebiger Reihenfolge und in beliebiger Kombination mit den offenbarten Merkmalen und Optionen: das Ermitteln der jeweiligen Statusvektoren für die ECUs in der Gruppe, wobei jeder Statusvektor angibt, ob sich das entsprechende ECU im Wach- oder im Ruhezustand befindet; das Ermitteln der jeweiligen Vorrichtungsrollen für das jeweilige ECU in der Gruppe, wobei jede Vorrichtungsrolle das entsprechende ECU als Slave-Vorrichtung oder Master-Vorrichtung bezeichnet; das Ermitteln einer zugewiesenen Hierarchie für die Gruppe von ECUs, wobei die zugewiesene Hierarchie Prioritätskennzeichnungen (z. B. 1, 2, 3 usw.) für die Auswahl jedes ECU als Master-Vorrichtung beinhaltet; Senden oder Empfangen eines Modusänderungssignals, z. B. eingebettet in ein REQ- oder NMF-Paket, das anzeigt, dass ein Steuergerät in der Gruppe beabsichtigt, vom Aufwach- in den Ruhezustand oder vom Ruhezustand in den Wachzustand zu wechseln; und, in Reaktion auf dieses Modusänderungssignal, Modifizieren der jeweiligen Vorrichtungsrolle für ein erstes ECU in der Gruppe von der Master-Vorrichtung zur Slave-Vorrichtung und Modifizieren der jeweiligen Vorrichtungsrolle für ein zweites ECU in der Gruppe von der Slave-Vorrichtung zur Master-Vorrichtung, wobei beide Modifikationen auf der zugeordneten Hierarchie und den Statusvektoren für die Steuergeräte basieren. Weitere Aspekte der vorliegenden Offenbarung beziehen sich auf Kraftfahrzeuge, die mit einem Bordnetz von Steuerungen und Vorrichtungen sowie einer Steuerlogik zur Steuerung des Betriebs dieser Steuerungen/Vorrichtungen ausgestattet sind. Ein „Kraftfahrzeug“, wie hierin verwendet, kann sich auf jede relevante Fahrzeugplattform, wie z. B. Personenkraftwagen (Verbrennungsmotoren, Hybrid-, Elektro-, Brennstoffzellenantrieben, vollständig oder teilweise autonom, usw.), Transportfahrzeuge, Industriefahrzeuge, Raupenfahrzeuge, Geländefahrzeuge (ATV), landwirtschaftliche Geräte, Boote, Flugzeuge, Züge usw. In einem Beispiel wird ein Kraftfahrzeug vorgestellt, das eine Fahrzeugkarosserie, eine Kommunikationsschnittstelle und mehrere ECUs, die an die Fahrzeugkarosserie angeschlossen sind, beinhaltet, wobei eine Gruppe der ECUs über die Kommunikationsschnittstelle kommunikativ verbunden ist. Jedes ECU in der Gruppe ist auf Folgendes programmiert: das Ermitteln, über eine lokal gespeicherte Statustabelle die jeweiligen Statusvektoren für die ECUs in der Gruppe, wobei jeder Statusvektor angibt, ob das entsprechende ECU im Wachzustand oder im Ruhezustand ist; das Ermitteln, über die lokal gespeicherte Statustabelle, die jeweiligen Vorrichtungsrollen für die ECUs, wobei jede Vorrichtungsrolle das entsprechende ECU als Slave oder Master bezeichnet; das Ermitteln, über eine lokal gespeicherte Master-Auswahltabelle, einer zugewiesenen Hierarchie für die ECUs in der Gruppe, wobei die zugewiesene Hierarchie die entsprechenden Prioritätsbezeichnungen zur Auswahl der ECUs als Master-Vorrichtung beinhaltet; und Empfangen oder Senden eines Modusänderungssignals, das anzeigt, dass das ECU oder eines der anderen ECUs in der Gruppe beabsichtigt, vom Aktivzustand in den Ruhezustand oder vom Ruhezustand in den Aktivzustand überzugehen. Als Reaktion auf das Empfangen/Senden eines Modusänderungssignals wechselt die entsprechende Vorrichtungsrolle für ein erstes ECU in der Gruppe von Master zu Slave, während gleichzeitig die jeweilige Vorrichtungsrolle für ein zweites ECU von Slave zu Master basierend auf der zugeordneten Hierarchie und den Statusvektoren geändert wird. Zusätzliche Aspekte der vorliegenden Offenbarung beziehen sich auf nicht-flüchtige, computerlesbare Medien, in denen Anweisungen zur Ausführung durch mindestens einen oder mehrere Prozessoren eines fahrzeuginternen Netzwerks von ECUs gespeichert sind. Diese Anweisungen bewirken, wenn sie ausgeführt werden, dass das Netzwerk von ECUs verschiedene Schritte durchführt, einschließlich: dem Abrufen aus einer Nachschlagetabelle oder dem anderweitigen Ermitteln von Statusvektoren für die ECUs in einer virtuellen Gruppe, wobei jeder Statusvektor angibt, ob ein ECU aktiv oder im Ruhezustand ist; dem Abrufen aus einer Nachschlagetabelle oder dem anderweitigen Ermitteln von entsprechenden Vorrichtungsrollen für die ECUs in der Gruppe, wobei jede Vorrichtungsrolle ein ECU als Slave-Vorrichtung oder Master-Vorrichtung bezeichnet; dem Abrufen aus einer Nachschlagetabelle oder dem anderweitigen Ermitteln einer zugeordneten Hierarchie für die Gruppe von ECUs, wobei die zugewiesene Hierarchie die ECUs zur Auswahl als Mastervorrichtung priorisiert; dem Empfangen/Senden eines Modusänderungssignals, das anzeigt, dass ein ECU in der Gruppe beabsichtigt, in den Ruhezustand oder in den Wachzustand überzugehen; und, in Reaktion auf das Modusänderungssignal, dem Modifizieren der jeweiligen Vorrichtungsrolle für ein erstes ECU in der Gruppe zu einer Slave-Vorrichtung bei gleichzeitiger Modifizierung der jeweiligen Vorrichtungsrolle für ein zweites ECU zu einer Master-Vorrichtung basierend auf der zugewiesenen Hierarchie und den Statusvektoren für die ECUs in der Gruppe. Die vorstehende Kurzdarstellung soll nicht jede Ausführungsform oder jeden Aspekt der vorliegenden Offenbarung repräsentieren. Vielmehr veranschaulicht die vorstehende Kurzdarstellung lediglich einige der neuartigen Aspekte und Merkmale, wie hierin dargelegt. Die vorstehend aufgeführten Merkmale und Vorteile sowie andere Merkmale und Vorteile der vorliegenden Offenbarung werden aus der folgenden ausführlichen Beschreibung der dargestellten Ausführungsformen und der repräsentativen Arten zum Ausführen der vorliegenden Offenbarung in Verbindung mit den begleitenden Zeichnungen und den beigefügten Ansprüchen leicht ersichtlich. Darüber hinaus beinhaltet die vorliegende Offenbarung ausdrücklich alle Kombinationen und Teilkombinationen der vorangehenden Elemente und Merkmale, die oben und im Folgenden dargestellt sind. Für die vorliegende Offenbarung können verschiedene Modifikationen und alternative Formen zur Anwendung kommen und einige exemplarische Ausführungsformen werden hierin anhand der Zeichnungen in Form von Detailbeispielen dargestellt. Es versteht sich allerdings, dass die neuartigen Aspekte dieser Offenbarung nicht auf die in den hinzugefügten Zeichnungen dargestellten besonderen Formen beschränkt sind. Vielmehr umfasst diese Offenbarung alle Modifikationen, Entsprechungen, Kombinationen, Teilkombinationen Permutationen, Gruppierungen und Alternativen, die dem Erfindungsgedanken und dem Umfang der Offenbarung entsprechen, wie sie durch die beigefügten Ansprüche definiert sind. Diese Offenbarung eignet sich für eine Vielzahl von Ausführungsformen. Diese sind in den Zeichnungen dargestellt und hierin in detaillierten exemplarischen Ausführungsformen der Offenbarung beschrieben, mit der Erkenntnis, dass die vorliegende Offenbarung als eine Veranschaulichung der Prinzipien der Offenbarung zu betrachten ist, und nicht als eine Einschränkung der breiten Aspekte der Offenbarung bezüglich der dargestellten Ausführungsformen. Entsprechend sollten Elemente und Einschränkungen, die beispielsweise in den Abschnitten der Kurzdarstellung, der Zusammenfassung und der ausführlichen Beschreibung offenbart, aber nicht explizit in den Patentansprüchen aufgeführt sind, nicht per Schlussfolgerung, Rückschluss oder anderweitig einzeln oder insgesamt in die Patentansprüche integriert werden. Zu Zwecken der vorliegenden ausführlichen Beschreibung, soweit nicht ausdrücklich dementiert: beinhaltet die Singularform die Pluralform und umgekehrt; die Wörter „und“ und „oder“ sind beide verbindend und trennend; das Wort „alle“ bedeutet „alle und jegliche“; das Wort „jegliche“ bedeutet „alle und jegliche“; und die Wörter „einschließlich“ und „umfassend“ und „mit“ bedeuten „einschließlich ohne Einschränkung“. Darüber hinaus können beispielsweise Wörter für Annäherungen, wie „etwa“, „fast“, „wesentlich“, „ungefähr“ und dergleichen, hierin im Sinne von „bei, nahe oder nahezu“, oder „innerhalb 3-5 % von“ oder „innerhalb akzeptabler Herstellungstoleranzen“ oder jegliche logische Kombination davon verwendet werden. Mit Bezug auf die Zeichnungen, worin sich gleiche Bezugszeichen auf gleiche Merkmale in den verschiedenen Ansichten beziehen, wird in Das repräsentative Fahrzeug 10 von Kommunikativ an die Telematikeinheit 14 angekoppelt ist eine Netzwerkverbindungsschnittstelle 34, zu deren geeigneten Beispielen Twisted Pair/Fiber Optic Ethernet Switch, interner/externer paralleler/serieller Kommunikationsbus, LAN, Controller Area Network (CAN), Media Oriented System Transfer (MOST), Local Interconnection Network (LIN) u. ä. gehören. Andere geeignete Kommunikationsschnittstellen können diejenigen sein, die den bekannten ISO-, SAE- und IEEE-Standards und -Spezifikationen entsprechen. Die Netzwerkverbindungsschnittstelle 34 ermöglicht es der Fahrzeug-Hardware 16, einschließlich der Telematikeinheit 14, untereinander und mit verschiedenen Systemen und Subsystemen sowohl außerhalb der Fahrzeugkarosserie 12 als auch innerhalb des Fahrzeugs 10 Signale zu senden und zu empfangen, um verschiedene Fahrzeugfunktionen auszuführen, wie zum Beispiel das Entriegeln einer Fahrzeugtür, das Positionieren und Ausrichten eines Fahrzeugsitzes, das Steuern der Motordrosselklappe, das Aktivieren/Deaktivieren des Bremssystems und dergleichen. So empfängt und/oder überträgt die Telematikeinheit 14 beispielsweise Daten zu/von einem Sicherheitssystem ECU 52, einem Motorsteuergerät (ECM) 54, einem Infotainment-Anwendungsmodul 56, Sensorschnittstellenmodul(en) 58 und verschiedenen anderen Fahrzeugsteuervorrichtungen 60, wie beispielsweise einem Getriebesteuermodul (TCM), einem Klimasteuermodul (CCM), einem Bremssystemmodul (BCM) usw. Mit weiterem Bezug auf Zuwendend auf Die Systemarchitektur 100 ist so konzipiert, dass die einzelnen Steuerungen 112A-112N dynamisch und kooperativ zwischen einem energiesparenden Ruhemodus (dargestellt mit Kreuzschraffur im ECU 112B von Für die Verwaltung des Betriebs der vernetzten ECUs von Alle Vorrichtungen in der repräsentativen Architektur 100 von In Fortsetzung der Beispiele für Netzwerk-Frame-Optionen, wenn eine Vorrichtung im Ruhezustand aktiviert werden soll, ist in einem REQ-Paket, das von der ruhenden ECU an ein Master-ECU (wenn eines davon aktiv ist) und/oder andere zugängliche ECUs in der Gruppe gesendet wird, ein Modusänderungssignal, das diese Absicht anzeigt, beinhaltet. Dieses REQ-Paket kann zudem eine Master-Bezeichnungsanforderung beinhalten, und kann vor der Änderung der jeweiligen Vorrichtungsrollen für beliebige Vorrichtungen an/von Slave oder Master gesendet werden. Im Gegenzug kann das REQ-übertragende ECU von einer aktivierten Master-Vorrichtung ein NMF-Paket empfangen, das die Anforderung bestätigt - z. B. den jeweiligen Statusvektor und die Rolle der Vorrichtung des REQübertragenden ECU, die im ST aktualisiert wurden, um sowohl die aktivierte als auch die Master-Vorrichtung anzuzeigen. Umgekehrt, wenn die REQ-übertragende ECU kein NMF-Paket von einer Master-Vorrichtung empfängt, z. B. vor Ablauf einer bestimmten Zeitspanne (Zeitüberschreitungsbedingung), kann es erforderlich sein, dass die REQ-übertragende ECU im Ruhezustand weiterläuft. Alternativ kann sich das REQ-übertragende ECU vorübergehend selbst als Master-Vorrichtung auswählen, z. B. bis der Master-Auswahlprozess eingeleitet werden kann, um ein höher priorisiertes ECU als Master-Vorrichtung auszuwählen. Wenn nun eine aktivierte Slave-Vorrichtung in den Ruhezustand übergehen möchte, sendet die Slave-Vorrichtung ein REQ-Paket mit einer entsprechenden Modus-Änderungsanforderung an die aktuell benannte Master-Vorrichtung. Das Master-ECU antwortet auf dieses REQ-Paket mit einem NMF-Paket, das die Modus-Änderungsanforderung entweder genehmigt oder ablehnt, wie im Folgenden näher beschrieben wird. Zur Unterstützung eines kollaborativen Sleep/Wake-Prozesses kann die Rolle der Master-Vorrichtung zwischen den Assets migrieren, die einer entsprechenden Gruppe zugeordnet sind, wobei die jeweilige Rolle der Vorrichtung für ein Master-ECU in der Gruppe von Master zu Slave geändert wird, während die jeweilige Rolle der Vorrichtung für ein Slave-ECU in der Gruppe von Slave zu Master geändert wird. Der Master-Auswahlprozess, der im Folgenden näher beschrieben wird, basiert auf der zugeordneten Hierarchie der ECUs in der Gruppe und den aktuellen Betriebsarten für diese ECUs. Nach der Modifikation der jeweiligen Rolle für eine Slave-Vorrichtung zum Master wird das neu benannte Master-ECU ein Netzwerkmanagement-Frame-Paket mit einer aktualisierten Statustabelle mit allen geänderte Vorrichtungsrollen und alle geänderten Statusvektoren an die verbleibenden ECUs übertragen. Nach dem Senden des NMF-Pakets aktualisiert jedes der empfangenden ECUs in der Gruppe seinen individuellen ST, der in seinem jeweiligen lokalen Speicher abgelegt ist, um die geänderten Vorrichtungsrollen und geänderten Statusvektoren aufzunehmen. Zumindest bei einigen Ausführungsformen sind die NMF- und REQ-Pakete kurz, um den Übertragungsaufwand zu minimieren und den Verarbeitungsaufwand zu reduzieren. Als weitere Option beinhalten beide Pakete einen Quellidentifikator, der angibt, welche Vorrichtung das Paket gesendet hat, und eine Statusbit-Vektoränderung mit der beabsichtigten Geräte-ID (für ein NMF) oder eine Modus-Änderungsanforderung mit/ohne Master-Bezeichnungsanforderung (für einen REQ). Im Hinblick auf Mit fortlaufendem Verweis auf Mit anschließendem Bezug auf Das Verfahren 300 von Alle vernetzten Vorrichtungen in einer bestimmten Gruppe können das Wakeup-Management-Protokoll 400 von Aspekte dieser Offenbarung können in einigen Ausführungsformen durch ein computerausführbares Programm von Anweisungen implementiert werden, wie zum Beispiel Programmmodulen, die allgemein als Softwareanwendungen oder Anwendungsprogramme bezeichnet werden, die von einem Onboard-Computer ausgeführt werden. Die Software kann in nicht einschränkenden Beispielen Routinen, Programme, Objekte, Komponenten und Datenstrukturen beinhalten, die bestimmte Aufgaben ausführen oder bestimmte abstrakte Datentypen implementieren. Die Software kann eine Schnittstelle bilden, damit ein Computer entsprechend einer Eingabequelle reagieren kann. Die Software kann auch mit anderen Codesegmenten zusammenarbeiten, um eine Vielzahl von Aufgaben in Reaktion auf Daten zu initiieren, die in Verbindung mit der Quelle der empfangenen Daten empfangen werden. Die Software kann auf einem beliebigen einer Vielzahl von Speichermedien, wie CD-ROM, Magnetplatte, Blasenspeicher und Halbleiterspeicher (z. B. verschiedene Arten von RAM oder ROM), gespeichert sein. Darüber hinaus können Aspekte der vorliegenden Offenbarung mit einer Vielzahl von Computersystem- und Computernetzkonfigurationen einschließlich Mehrprozessorsystemen, Mikroprozessor-basierter oder programmierbarer Unterhaltungselektronik, Minicomputern, Mainframe-Computern und dergleichen durchgeführt werden. Zusätzlich können Aspekte der vorliegenden Offenbarung in Umgebungen mit verteilter Datenverarbeitung ausgeführt werden, bei denen Aufgaben durch Femverarbeitungsvorrichtungen ausgeführt werden, die durch ein Kommunikationsnetzwerk verbunden sind. In einer verteilten Computerumgebung können Programmmodule sowohl auf lokalen als auch entfernten Computerspeichermedien einschließlich Speichergeräten angeordnet sein. Aspekte der vorliegenden Offenbarung können daher in Verbindung mit verschiedener Hardware, Software oder einer Kombination davon in einem Computersystem oder einem anderen Verarbeitungssystem implementiert werden. Jedes der hierin beschriebenen Verfahren kann maschinenlesbare Anweisungen zur Ausführung beinhalten durch: (a) einen Prozessor, (b) eine Steuerung, und/oder (c) jede andere geeignete Verarbeitungsvorrichtung. Jeder hierin offenbarte Algorithmus, jede Software oder jedes Verfahren kann in einer Software enthalten sein, die auf einem greifbaren Medium, wie beispielsweise einem Flash-Speicher, einer CD-ROM, einer Diskette, einer Festplatte, einer Digital Versatile Disk (DVD) oder andere Speichervorrichtungen, gespeichert ist, jedoch werden Fachleute leicht erkennen, dass der gesamte Algorithmus und/oder Teile davon alternativ durch eine andere Vorrichtung als eine Steuerung ausgeführt werden können und/oder in Firmware oder dedizierter Hardware in einer gut bekannten Weise implementiert werden können (z. B. kann er durch einen anwendungsspezifischen integrierter Schaltkreis (Application Specific Integrated Circuit), eine programmierbare Logikvorrichtung (PLD), eine feldprogrammierbare Logikvorrichtung (FPLD), eine diskrete Logik usw. implementiert werden). Obwohl spezielle Algorithmen unter Bezugnahme auf die hier dargestellten Flussdiagramme beschrieben werden, wird der Durchschnittsfachmann leicht erkennen, dass viele andere Verfahren zum Implementieren der exemplarischen maschinenlesbaren Anweisungen alternativ verwendet werden können. Obwohl einige Aspekte der vorliegenden Offenbarung im Detail unter Bezugnahme auf die dargestellten Ausführungsformen beschrieben worden sind, werden Fachleute auf dem Gebiet erkennen, dass viele Änderungen an denselben vorgenommen werden können, ohne vom Schutzumfang der vorliegenden Offenbarung abzuweichen. Die vorliegende Offenbarung ist nicht beschränkt auf die hierin offenbarte genaue Konstruktion und Zusammensetzung; jegliche und alle Modifikationen, Änderungen und Variationen, ersichtlich aus den vorangehenden Beschreibungen, liegen innerhalb des Umfangs der Offenbarung, wie in den hinzugefügten Ansprüchen definiert. Darüber hinaus beinhalten die vorliegenden Konzepte ausdrücklich alle Kombinationen und Teilkombinationen der vorangehenden Elemente und Merkmale. Offenbart werden Steuerungsalgorithmen und Systemarchitekturen zur Verwaltung des Betriebs vernetzter Steuerungen und Vorrichtungen, einschließlich Fahrzeuge mit einem Bordnetz von elektronischen Steuergeräten (ECU) und Steuerlogik zum Regeln des Ruhens und Aktivierens dieser ECUs. Ein Verfahren zur Verwaltung des fahrzeuginternen Netzwerks von ECUs in einem Kraftfahrzeug beinhaltet: das Ermitteln von Statusvektoren für eine Gruppe von ECUs, wobei jeder Statusvektor angibt, ob das entsprechende ECU aktiv oder nicht aktiv ist; das Ermitteln der Vorrichtungsrollen für diese ECUs - Slave oder Master; das Ermitteln einer zugewiesenen Hierarchie zum Auswählen der ECUs als Master-Vorrichtung; das Empfangen eines Modusänderungssignals, das anzeigt, dass ein ECU beabsichtigt, in den Ruhezustand oder in den aktivierten Zustand überzugehen; und in Reaktion darauf, das Modifizieren der jeweiligen Vorrichtungsrolle für ein ECU vom Master zum Slave und der jeweiligen Vorrichtungsrolle für ein anderes ECU vom Slave zum Master basierend auf der zugewiesenen Hierarchie und den Statusvektoren für die ECUs. Verfahren zum Verwalten eines Bordnetzes von elektronischen Steuereinheiten (ECU) eines Kraftfahrzeugs, wobei eine Gruppe der ECUs über eine Kommunikationsschnittstelle miteinander verbunden ist und jedes für den Übergang zwischen einem aktivierten Zustand und einem Ruhezustand betreibbar ist, das Verfahren umfassend:
Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach Verfahren nach EINLEITUNG
KURZDARSTELLUNG
Figurenliste
AUSFÜHRLICHE BESCHREIBUNG
das Ermitteln der jeweiligen Statusvektoren für die ECUs in der Gruppe, wobei jeder der Statusvektoren angibt, ob sich das entsprechende ECU im aktivierten Zustand oder im Ruhezustand befindet;
das Ermitteln der jeweiligen Vorrichtungsrollen für die ECUs in der Gruppe, wobei jede der Vorrichtungsrollen das entsprechende ECU als Slave-Vorrichtung oder Master-Vorrichtung bezeichnet;
das Ermitteln einer zugewiesenen Hierarchie für die ECUs in der Gruppe, wobei die zugewiesene Hierarchie einschließlich der entsprechenden Prioritätsbezeichnungen zur Auswahl der ECUs als Master-Vorrichtung dient;
das Übertragen eines Modusänderungssignals, das anzeigt, dass eines der ECUs beabsichtigt, vom aktivierten Zustand in den Ruhezustand oder vom Ruhezustand in den aktivierten Zustand überzugehen; und
in Reaktion auf das Übertragen des Modusänderungssignals, Modifizieren der jeweiligen Vorrichtungsrolle für ein erstes der ECUs in der Gruppe von der Master-Vorrichtung zu der Slave-Vorrichtung und Modifizieren der jeweiligen Vorrichtungsrolle für ein zweites der ECUs in der Gruppe von der Slave-Vorrichtung zu der Master-Vorrichtung basierend auf der zugewiesenen Hierarchie und den Statusvektoren für die ECUs in der Gruppe.