ALGORITHM LEARNING METHOD AND APPARATUS THEREFOR
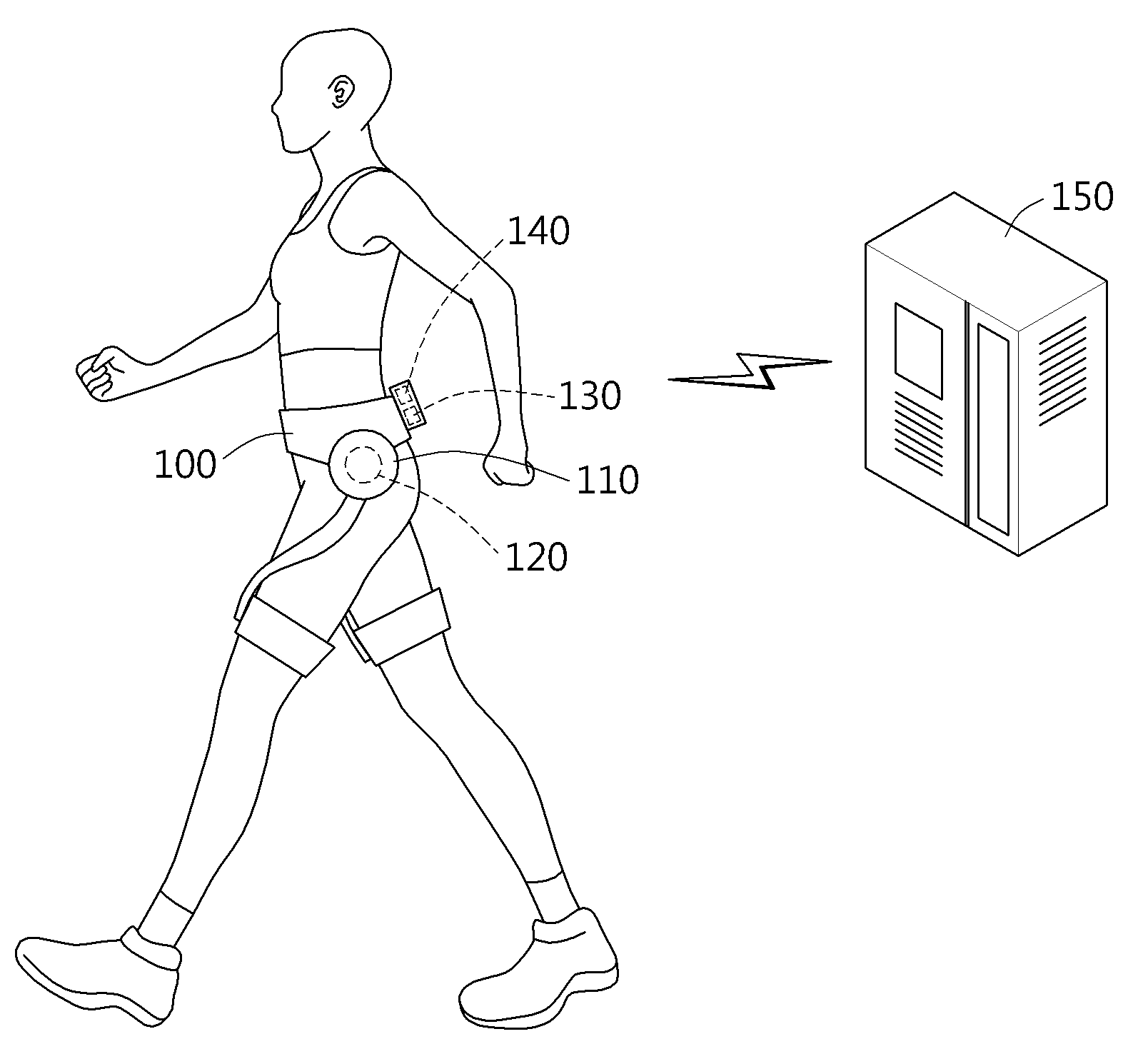
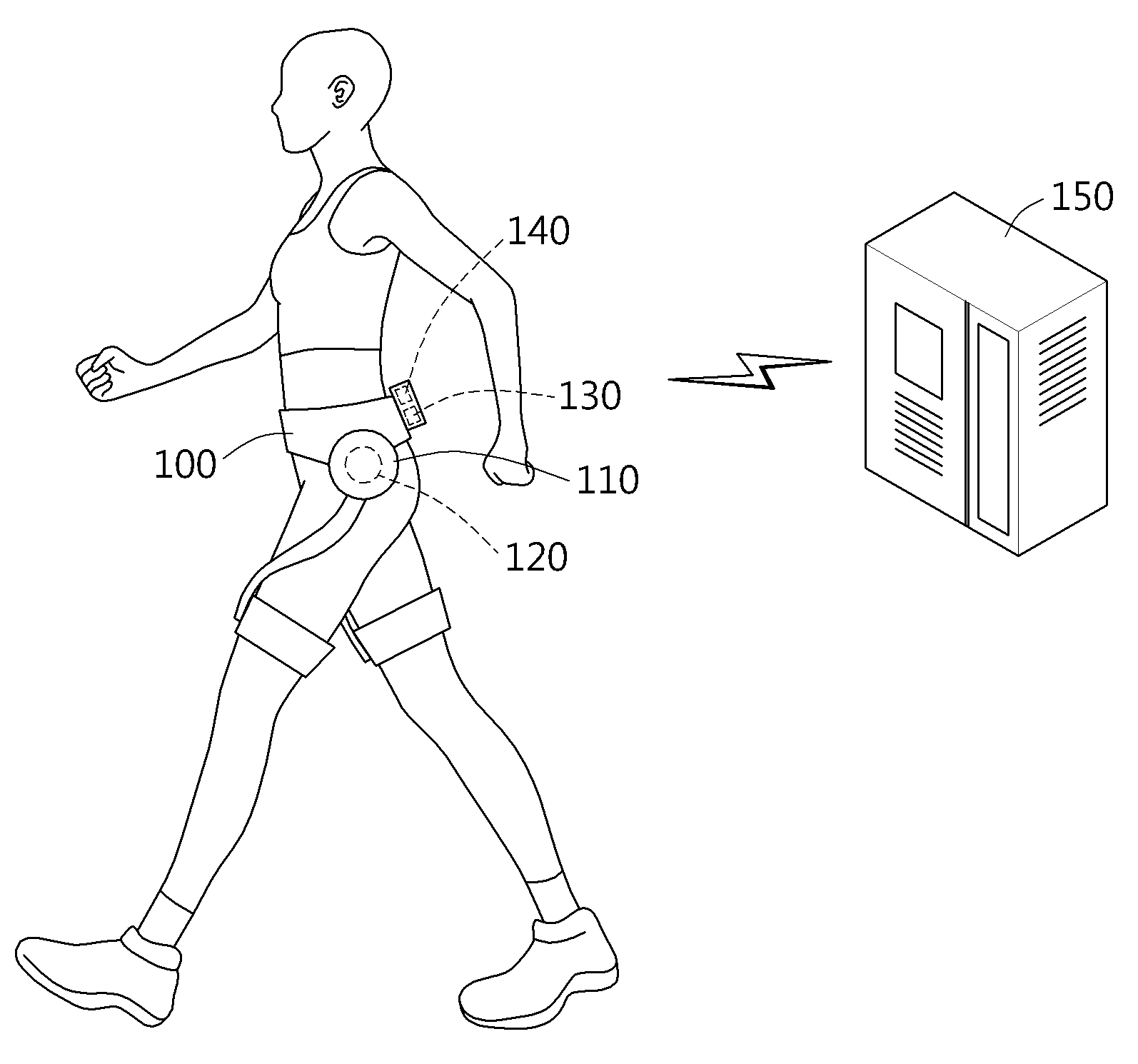
In the embodiment are provided below the teaching method and device relates to coated status algorithm algorithm to teaching method are disclosed. Recent articulation door number for the thereby cope evaporating human ailments such inconvenience of pain being increased, joint portable old man or patients can walk aid device permits to facilitate walking etc.. In addition, military corresponding to at walk aid device etc. for the muscular strengths of human developed. The vertical poles can walk aid device number is included as force under public affairs legs. The user walk aid device walking status, corresponding to user number can be recognized walking under public affairs auxiliary force. The ram and the walking state must walk aid device includes a walking state number under public affairs auxiliary force can be suitable, walking can be recognition of various method etc. inside. According to one aspect, an algorithm and system for teaching device coated status method performed by the learning algorithm, walking through the fore-aft simulation (dynamic simulation) associated with generating virtual data sensed by a virtual human model (virtual sensing data), and using said virtual data sensed by a coated state (walking state) teaching recognizing algorithm comprising the following steps. The virtual data sensed by said generating, based on said virtual human body characteristics generating virtual human model, said virtual human model and walking environment information based on walking model generating, on the basis of said driving and said fore-aft walking the simulation can be said virtual sensing data. The virtual data sensed by said generating, said virtual sensor (virtual sensor) further includes steps of associating a virtual human model, said virtual sensing data can be generated by said virtual sensor. Said virtual sensing data said virtual human model joint angle of, walking speed data, as well as acceleration data walking, with the ground (ground reaction force) and comprising at least one of the electromyogram (elecromyographic; EMG) can be. Said neural network (Deep Neural Network; DNN) deep algorithm implementation being. Said DNN deep convolutional neural network (Deep Convolution Neural Network; DCNN) or deep billets can be either leaf network (Deep Belief Network; DBN). Teaching step said algorithm, said algorithm to said virtual sensing based on data for each of the preset walking state calculating probability values, label (label) and fore-aft simulation data based on said error value calculating likelihood values, and adjusting at least one parameter of said algorithm to reduce said error value can be a. Said algorithm and system for teaching step, said iteratively until the error value exceeds a preset value hereinafter (iteratively) be a steps performed. Said probability values step, using said virtual data sensed by generating input vector, extracting features from said input vector element, by down sampling said input vector, and said feature element and the downsampled input vector for each of the preset said calculates the walking state can be. Teaching step said algorithm, said algorithm encoded (encode) said virtual sensing data by generating compression information (compressed information), said decode compressed information (decode) generating a decode information (decoded information), said virtual sensing data and said calculating said error value between circuit network information decoding error value based on at least one parameter of said algorithm and adjusting can be a. Said error value calculating step, said virtual sensing data and said distance (Euclidean distance) between cross entropy (cross entropy) or type the D it will grow it froze decode information calculating either be a. Said learning algorithm using said algorithm method number data sensed by a seal has further includes adjusting (real sensing data) can be. The step of adjusting said algorithm, said chamber receiving sensing data from the external terminal number, and said chamber including said adjusting algorithm using data sensed by a number can be. The method said learning algorithm, said algorithm further comprises the steps of transmitting said adjusted external terminal can be. The external terminal (wearable device) said wearable device implementation being. Said auxiliary device (walking assistance device) external terminal walking implementation being. The step of adjusting said algorithm, generating data sensed by a person using a number of gait sensor chamber, and said chamber including said adjusting algorithm using data sensed by a number can be. Said chamber said joint angle of human sensing data number, walking speed data, as well as acceleration data walking, comprising at least one ground and EMG signal with the can. Other according to one side, through the fore-aft (dynamic simulation) learning algorithm device is associated with virtual data sensed by a virtual human model simulation of gait (virtual sensing data) generating, using said virtual data sensed by a coated state (walking state) that recognize an algorithm processor and said teaching algorithm can be a memory. According to another one side, through adjusting algorithm method (virtual sensing data) obtaining virtual data sensed by a learning algorithm, a person's gait sensor generating a sensing data (real sensing data) number chamber, and said chamber and said adjusting algorithm using data sensed by a number, said virtual sensing data, walking through the fore-aft simulation (dynamic simulation) associated with virtual human model is produced, said algorithm, using said virtual data sensed by a coated state (walking state) learned to perform signal processing may be disclosed. Said neural network (Deep Neural Network; DNN) deep algorithm implementation being. Said DNN deep convolutional neural network (Deep Convolution Neural Network; DCNN) or deep billets (Deep Belief Network; DBN) leaf network implementation being. The number generating data sensed by said chamber, said chamber said equipment by a user generating a data sensed by said sensor be a number. Said terminal implementation being wearable device (wearable device). Said terminal (walking assistance device) walk aid device implementation being. Said chamber said joint angle of human sensing data number, walking speed data, as well as acceleration data walking, comprising at least one EMG signal data and ground with the can. According to another one side, adjusting algorithm creates the virtual data sensed by a device (virtual sensing data) through a memory which stores a learning algorithm, a chamber generating a person's gait (real sensing data) number data sensed by a sensor, and adjusting said algorithm using a processor number data sensed by said chamber, said virtual sensing data, walking through the fore-aft (dynamic simulation) are associated with the generated virtual human model simulation, said algorithm, using said virtual data sensed by a coated state (walking state) learned to perform signal processing may be disclosed. 1 and 2 according to one example walk aid device is also illustrates the substrate. Also in the embodiment according to Figure 3 shows a device decodes one of high when a learning algorithm. Figure 4 shows a flow of learning algorithm also one in the embodiment according to method are disclosed. Figure 5 shows a flow of virtual sensing data produced by the method according to one example also are disclosed. Figure 6 shows a virtual data sensed by a flow of teaching method according to one example using algorithm also are disclosed. Figure 7 shows a flow of calculating probabilities walking state according to one example method also are disclosed. Figure 8 shows a virtual data sensed by another algorithm according to one example using flow of teaching method are disclosed. Figure 9 shows a method for adjusting flow of algorithm according to one example using data sensed by a number chamber also are disclosed. Figure 10 shows a method according to one example using data sensed by another number chamber flow of adjusting algorithm are disclosed. Figure 11 shows a one in the embodiment according to algorithm of adjusting device also are disclosed. Figure 12 shows a flow of one in the embodiment according to algorithm adjusting method also are disclosed. Figure 13 shows a method for adjusting algorithm according to one example using data sensed by a flow of number chamber also are disclosed. In hereinafter, with reference to the attached drawing in the embodiment detailed as follows. However, in the embodiment and not the limited number by one or range of such patent application. Each drawing number it became at the time of exhibits the same member to the same references. In the embodiment described below is the change that can be applied. In the embodiment described below are defined with respect to embodiment which are not included in the form, character recognition for all changing, including replacement should understood to evenly to the water. In the embodiment used to account for use in particular in the embodiment that the term only, defining in the embodiment is intending to be endured. It is apparent that a single representation of the differently in order not providing language translators, comprising plurality of representation. In the specification, the term "comprising" or "having disclosed" specification of articles feature, number, step, operation, components, parts or specify a combination not present included, another aspect of one or more moveable number, step, operation, component, component or a combination of these is understood to presence of or additionally pre-times those possibility should not number. Not defined differently, scientific or technical terms so that all terms in the embodiment thus belongs in the art generally by the same person with skill in the art will have the meanings etc.. Dictionary used for such as generally defined on the context of respective technical terms have the meanings must be consistent semantics and having interprets, the application will not become manifest in defining, or overly formal sense interpreted not ideal. In addition, described with reference to the attached drawing is connected to the, drawing code is independent local components the same references whereby the description dispensed the on-sensors other. In publicly known techniques are described in the embodiment description is specifically related to the subject matter of the analogy in the embodiment described can be decided to be unnecessarily if the V-shaped substrate. <SUMMARY of walk aid device> 1 and 2 according to one example walk aid device is also illustrates the substrate. The reference also 1, walk aid device (100) includes a user walking aid other. Walk aid device (100) is wearable device (wearable device) implementation being. Figure 1 shows a device but also in a hip type (hip-a type) and walk aid of, the type of the hip type walk aid device has the number one, the supporting portion of form, form supporting knee, ankle to form supporting and form the entire supporting can be either. According to the of Figure 1 in the embodiment, walk aid device (100) has a driven portion (110), sensor (120), inertia (Inertial Measurement Unit;IMU) sensor (130) and number control unit (140) having a predetermined wavelength. Drive (110) outputs a drive force assist movement of the user's hip joint (hip joint) 2000. Drive (110) can be user's right hip and/or left hip section. Drive (110) is capable of generating a motor torque can be. Sensor section (120) is the angle of the leg can be hip of a user. Sensor section (120) in which the angle of the hip joint angle of sensing information about a right hip, left hip joint angle, and direction of movement can be both hip angle differences between the femur comprising. For example, sensor section (120) has a driven portion (110) can be located within. According to one aspect, sensor section (120) comprising a potentiometer can be. Potentiometer user walking-motion according to R axis, axis joint angle axis L and R, L axis joint angular velocity senses disclosed. Inertial sensor (130) is in acceleration information and the posture of the leg can be measuring information. For example, inertial sensor (130) includes generally a walking-motion according to X axis, Y axis, Z axis acceleration and X axis, Y axis, each Z-axis angular velocity sensor senses disclosed. Walk aid device (100) is inertial sensor (130) measured in the acceleration information based on the detecting points of the user's feet can be open. Pressure sensor (not shown) located in the foot of the user's feet of open user can detect a point. Force sensor (force sensor) for measuring with the user can be situated the plantar surface (ground reaction force). Walk aid device (100) includes a sensor section previously described (120) and an inertia sensor (130) in addition, walking-motion according to the amount of movement or the biometric signal such as user senses change other sensor (e.g., an electromyography sensor (ElectroMyoGram sensor; EMG sensor)) can be a. Number control unit (140) can be a communication device, communication device outer server (150) can be communicates with. Number control unit (140) connects the server (150) exchange data and can be. For example, number control unit (140) is via the Internet server (150) exchange data and can be. Number control unit (140) has a driven portion (110) is used to output the auxiliary force for aiding a coated, driver (110) [e[e] it will do be a number. Number control unit (140) is to generate a drive torque (110) outputs a signal number can be a number plower. Drive (110) includes a number control unit (140) is a number based on output, torque can be. Number control unit (140) has a driven portion (110) that uses an algorithm to calculate the torque produces can be. For example, neural network (Deep Neural Network; DNN) deep algorithm implementation being. Deep DNN convolutional neural network (Deep Convolution Neural Network; DCNN) or deep billets can be either leaf network (Deep Belief Network; DBN). Number control unit (140) is algorithm to walk aid device (100) wearing can be coated status. For example, be a kind of walking state, in which the kind and walking environment can be walking related diseases. The kind of be a normal walking, comprising a walking and running can be slow. The kind of walking related diseases including stroke and can be Parkinson's disease. Walking environment is a plain, comprising step and the ground can be warp direction. Walking algorithm based on a plurality of data related to the condition of the particular walking state in order to ram and the walking state, based on said data indicative of said signal to determine a particular walking would recognition or should. The algorithm is trained utilizing a basic data identify a ratio (training) or learning (learning) can be. This algorithm (deep learning) learning can deep employ implementation being. <Device learning algorithm> Also in the embodiment according to Figure 3 shows a device decodes one of high when a learning algorithm. According to one aspect, learning algorithm device (300) includes a walk aid device (100) can be included. For example, learning algorithm device (300) includes a number control unit (140) can be a. Other according to one aspect, learning algorithm device (300) connects the server (150) can be included. Learning algorithm device (300) to the server (150) compared with the, learned algorithm walk aid device (100) is stored in a memory of, number control unit (140) is stored algorithm can be understood to loading. Learning algorithm device (300) includes a communication unit (310), processor (320) and memory (330) having a predetermined wavelength. Communication unit (310) is walk aid device (100) of device or server (150) and data or information can be exchange of device. Processor (320) includes a communication unit (310) is received data and memory (330) can be stored in processing data. For example, processor (320) includes a number control unit (140) can be a. Memory (330) is a communication unit (310) is received data and processor (320) can be storing data handling. Figure 4 shows a flow of learning algorithm also one in the embodiment according to method are disclosed. Step (410) in, processor (320) through the fore-simulation (dynamic simulation) is associated with virtual data sensed by a virtual human model of gait (virtual sensing data) generate musical sound. Virtual data sensed by a learning algorithm can be used as a basis for data. By virtual sensing data is produced, learning algorithm can be obtain data required for reducing costs and resources. Step (420) in, processor (320) creates the virtual data sensed by a learning algorithm using the base. The system algorithm included in the algorithm can be adjusting the value of at least one parameter. Learned algorithm coated status can be improved by recognition rate. Using the virtual data sensed by a teaching pre - training (pre-a training) algorithm implementation being. Processor (320) is deep running (deep learning) method based on algorithm can be teaching. According to one aspect, step (430) to the server (150) when performed by a processor (320) is step (430) can be understood to perform. Other according to one aspect, step (430) equipped auxiliary device (100) can be understood to performed by. Below step (430) account of the processor (320) described or performed by, the pieces are not correct. Step (430) in, processor (320) includes a chamber (real sensing data) number data sensed by using algorithm can be adjusted. Chamber sensing data number walk aid device (100) of sensors (120) and IMU (130) which is data can be measured by. Chamber by adjusting algorithm using data sensed by a number algorithm capable of center. Chamber number using data sensed by a regulating algorithm implementation being adjusted further details (fine-a tuning). The regulating algorithm using data sensed by a number chamber walk aid device (100) of personalized (personalization) implementation being. Figure 5 shows a flow of virtual sensing data produced by the method according to one example also are disclosed. Step (410) is below steps (505 to 530) can be comprising. Step (505) in, processor (320) received from the user virtual human body can be based on attributes of the virtual human model. Key virtual human body characteristics, roller and sex can be like. The user virtual human body characteristics differently set various model can be created. For example, body according child, adult and the elderly virtual human model can be generated. Step (510) in, processor (320) creates the virtual human model and walking environment information can be based on walking model. Virtual human walks walking environment information model information on the ground, walking speed and diseases comprising case can be. The same virtual human model generated when walking environment even when different various walking model can be generated. Step (520) in, processor (320) creates the virtual sensor for human capable of API. Virtual sensor associated with virtual human model (type) can be minimum user position and virtual sensor format. Virtual human model (kinesiology) information can be measured from virtual sensor kinematics, kinematic (kinematics) information, and can be ground with the EMG measuring. For example, virtual virtual sensor of a body part of a human body acceleration, speed, joint angle, articulation angle speed, and can be ground with the EMG test. Step (530) in, processor (320) is walking on the basis of simulation can be fore-aft driving virtual sensing data. For example, processor (320) to the fore-aft engine driving through a physical simulation can be. Virtual sensing data generated by a virtual sensor, virtual human model joint angle of, walking speed data, as well as acceleration data walking, comprising at least one EMG signal data and ground with the can. Virtual sensing data can directly by using sensor measuring data and 1 1 difference can be calculated difference data 2 difference data. For example, if the read the post 2 difference (stride length), and a (cadence) can be pacespeed per minute (stride rate). Processor (320) is 1 difference data calculating difference data processing can be 2. Integrates the virtual human model and walking environment according to variously set in a narrow slit, walking on the basis of virtual sensing data generated walking model the user's personal persona disclosed. Through the fore-aft simulation data for learning algorithm for the Image hereinafter can be large. Figure 6 shows a virtual data sensed by a flow of teaching method according to one example using algorithm also are disclosed. Step (420) is below steps (610 to 640) can be comprising. Steps (610 to 640) map learning (supervised learning) method implementation being. Step (610) in, processor (320) creates the virtual data sensed by a predetermined algorithm based on walking state probabilities can be calculated. Step (610) initial (default) algorithm was first when subjected each parameter is set to a value may be described. Recognizing a predetermined walking conditions may be sensed data can be class (class) are big. Preset walking conditions may be a kind of, types and walking environment can be walking related diseases. For example, preset walking States are plain, downhill, step and decelerate the vehicle when, processor (320) creates the virtual sensing data corresponding to sensing data indicates that a plain walking state, downhill, decelerate the vehicle may each probability calculating step and can be. Step (620) in, processor (320) includes a label (label) fore-aft simulation data and calculating error value based on probability values can be. Be a virtual human body characteristics and walking environment information label includes a fore-aft of simulation data. For example, if the label is a plain, plain probability is 0. 3, downhill probability is 0. 2, decelerate the vehicle probability is 0. 3 probability step and is 0. 2 when were computed, error value is 0. Wednesday 7 2000. Step (630) in, processor (320) computing error so as algorithm can be adjust at least one parameter. For example, processor (320) includes a gradient descent (gradient descent) using the parameters of the method can be. The adjustment of the algorithm parameters implementation being the inverse of propagation (back-a propagation). For inverse propagation neural network learning (Neural Network) in the art details description is to omit diffuse to the nontrivial. Step (640) in, processor (320) can be comparing the error value and the threshold value. Can be a preset threshold value. Threshold value when the error value is hereinafter, learning algorithm can be terminated. Error value exceeding a threshold value, steps (610 to 630) can be re-performed. I.e., step (420) threshold value until the error value is hereinafter repeatedly (iteratively) can be performed. Figure 7 shows a flow of calculating probabilities walking state according to one example method also are disclosed. Step (610) is below steps (710 to 740) can be comprising. Step (710) in, processor (320) creates the virtual sensing data can be input vector. Processor (320) creates the virtual data sensed by a sensor noise can be added. For example, sensor noise is white Gaussian noise (White Gaussian Noise) implementation being. The facsimile data sensed by a virtual data sensed by a sensor noise added (fake sensing data) implementation being. Processor (320) is of constant time using one input vector can be virtual sensing data. Each channel can be generating virtual sensor input vector, disapproval produced to include the plurality of channels. For example, walking speed input vector, including joint angle and articulation angle speed can be. As another alternative, the articulation angle speed input vector x axis value, y axis value and can be z axis value. When the neural network algorithm, step (710) causes the corresponding layer (data layer) can be. Processor (320) creates the virtual sensing data have been saved data from database or database file labels can be extracted. Step (720) in, processor (320) can be input vector features from elements. Processor (320) input vector and kernel (kernel) vector feature elements convolution (convolution) operation can be. To the size of the filter kernel vector can be predetermined. [Mathematical equation 1] below can be extracted using the feature element. X and input vector, vector whose kernel is k, b includes a bias (bias) vector whose, y is feature element are disclosed. Bag-type f - linear mapping (non-a linear mapping) function and, according to one example, be a hyper ball [lik[lik] tangent function (hyperbolic tangent). When the neural network algorithm, step (720) corresponding convolution layer (convolution layer) can be. Convolution can be one or more layer. For example, convolutional layer SDA, one may be input vector, also one feature element be a generated. As another alternative, if a plurality of convolution layer, may be a plurality input vector, the plural feature element also can be generated. Can be performed in parallel layers include a plurality of convolution. A plurality of convolution layer when a plurality of channels can be understand, each convolution layer with respective channels by the virtual sensor data is processed can be. When a different property using the virtual sensor data is processed each channel independently learning data can be. Step (730) in, processor (320) can be downsampled input vector. For example, processor (320) is below a preset number of samples using [equations 2] input vector having one more samples can be. R x s a preset number and n is the number of samples of the input vector, can be constant regions. Max (x) is of constant region most large samples samples of a function are disclosed. Y is of constant having a maximum value in the region of the sample by a goniophotometer. As another alternative, processor (320) is below a preset number of samples using [equations 3] input vector of samples having mean value can be. X input vector whose, mean (x) having a function of a constant mean value of samples samples are disclosed. Y is of constant mean value in the region of the sample having by a goniophotometer. When the neural network algorithm, step (730) is pulling layer corresponding to (pooling layer) can be. Pulling can be one or more layer. For example, convolutional layer SDA, pulling layer also can be one disclosed. As another alternative, a plurality of convolution layer when, pulling layer also can be plural. A plurality of pulling layers include can be processed in parallel. According to one aspect, step (720) and step (730) are each alternately can be performed a plurality of times. Step (740) in, processor (320) includes a feature element and the downsampled input vector for each of the preset walking state can be calculates. Processor (320) is below [equations 4] can be output using vector. X and input vector, weighting matrix W is (weight matrix) vector whose, b1 bias (bias) vector disclosed. G (x) transmits an activation (activation) function and is, e.g., below [mathematical equation 5] implementation being. When the neural network algorithm, the output vector is calculated corresponding to complete - represents the neural network layer (fully non-connected neural network layer) can be connected. - (Hidden layer) hidden layer neural network layer connected complete implementation being. At least one pulling layers and can be connected to a hidden layer. Each channel independently learned features when virtual sensor data is processed can be incorporated in a hidden layer. Processor (320) an output vector for each of the probability values preset walking state can be calculated. For each of the probability value is below a preset walking state can be calculated using [mathematical equation 6]. Since the kind of walking States can vary, according to similar kinds of classification can be divided. For example, walking conditions may be walking to reflections from class, a class and consequently, the status of class can be divided into ground. Processor (320) is preset for each class can be calculating probability values for each of the walking state. [Mathematical equation 6] is in a particular class may indicate the disclosed. a1 To an Included is a walking States are disclosed. Exp (ai ) Is ai Expected value and, O (a) (a) for each of the class is for walking state probability value. For example, the status of a class and dead, a1 The plain, a2 The downhill, a3 The decelerate the vehicle and a4 When through a gate, O (a) is [0. 5, 0. 2, 0. 2, 0. 1] can be calculated. In the case of said1 Highest chance because, (a) is a plain (a1) ground state of recognition can be. When the neural network algorithm, walking state probability values for each of the process corresponding to soft max layer (softmax layer) can be. Figure 8 shows a virtual data sensed by another algorithm according to one example using flow of teaching method are disclosed. Step (420) is below steps (810 to 850) can be comprising. Steps (810 to 850) non - map learning (unsupervised learning) method implementation being. Virtual data sensed by a non - map learning method can be utilized where label free. Step (810) in, processor (320) creates the virtual sensing data algorithm encoded (encode) can be produce by compression information (compressed information). The compression information (740) corresponding to the output of the vector can be. Description is given of a virtual sensing data encoding method steps are (710 to 740) description is given can be replaced. Step (820) in, processor (320) is decoded by decoding information can be compressed information (decode). Processor (320) is encode reverse - order compressed information can decode disclosed. For example, compression information - fully connected neural network layer, pulling layer and convolution layer be decodable to an order. Step (830) in, processor (320) creates the virtual data sensed by a calculating error value between circuit network information and decoding video can be. For example, processor (320) creates the virtual data sensed by a cross between circuit network information and decode error value by calculating entropy (cross entropy) can be calculated. [Mathematical equation 7] below can be calculated using the cross entropy. Is a specific class and, n is the number of States and walking included operation of particular class, pi And creates the virtual data sensed value, qi A value of decoding information. As another alternative, processor (320) creates the virtual sensing data and decode information calculating error value by calculating the distance between type the D it will grow it froze (Euclidean distance) can be. Step (840) in, processor (320) computing error so as algorithm can be adjust at least one parameter. The adjustment of the parameters be a back propagation algorithm. Step (850) in, processor (320) can be comparing the error value and the threshold value. Can be a preset threshold value. Threshold value when the error value is hereinafter, learning algorithm can be terminated. Error value exceeding a threshold value, steps (810 to 840) can be re-performed. I.e., step (420) has a threshold value can be performed iteratively until the error value hereinafter. Figure 9 shows a method for adjusting flow of algorithm according to one example using data sensed by a number chamber also are disclosed. Method adjusting algorithm server (150) when performed by, step (430) is below steps (910 to 920) and, algorithm method adjusting step (930) can be further. Step (910) in, communication unit (310) receives data sensed by a thread from external terminal number can be. For example, the external terminal walk aid device (100) or wearable device implementation being. For example, communication unit (310) receives data sensed by a thread from the system and the external terminal number can be. Step (920) in, processor (320) includes adjusting algorithm using data sensed by a number chamber can be. Chamber number adjusting algorithm using data sensed by a description is given of a method using virtual data sensed by a description is given of a method for adjusting algorithm can be replaced by omitting a diffuse to the. Step (930) in, communication unit (310) has an external algorithm can be sent to the terminal. The adjusted using an external terminal can be walking status. Figure 10 shows a method according to one example using data sensed by another number chamber flow of adjusting algorithm are disclosed. According to one aspect, steps (410 to 430) can be performed by the same device. In the case of said step (430) is below steps (1010 and 1020) can be comprising. Step (1010) in, processor (320) using the sensor element can be a seal number sensing data. Chamber number data sensed by a sensor (real sensor) thread number difference data and data measured directly using 1 2 1 difference can be calculated difference data. For example, if the read the post 2 difference, can be speed per minutepace and comprising a number. Step (1020) in, processor (320) includes adjusting algorithm using data sensed by a number chamber can be. Figure 11 shows a one in the embodiment according to algorithm of adjusting device also are disclosed. According to one aspect, walk aid device (100) includes a device adjusting algorithm (1100) can be a. Algorithm adjusting device (1100) is chamber number can be adjusting algorithm using sensing data. Algorithm adjusting device (1100) is a communication unit (1110), processor (1120), memory (1130) and sensor (1140) can be comprising. Communication (1110) is walk aid device (100) other device or server (150) for exchange of information or data and can be. Processor (1120) is be a hardware processor. Processor (1120) is a communication unit (1110) is received data and memory (1130) processing data can be stored. For example, processor (1120) is number control unit (140) can be a. Memory (1130) is a communication unit (1110) is received data and processor (1120) can store data is processed. Sensor (1140) walking user information can be measuring. Sensor (1140) sensor unit (120) and IMU (130) can be a. Sensor (1140) is walking speed and acceleration, joint angle, articulation angle speed, and can be ground with the EMG measuring. Figure 12 shows a flow of one in the embodiment according to algorithm adjusting method also are disclosed. Step (1210) in, processor (1120) creates the virtual sensing data study algorithm can be obtain. Said virtual sensing data associated with walking through the fore-aft simulation virtual human model may be created, algorithm using virtual data sensed by a learned to coated status may be disclosed. For example, processor (1120) is a communication unit (1110) to the server through the (150) can be received from the receiving learning algorithm. As another alternative, processor (1120) the memory (1130) for loading the algorithm can be stored. In another example, algorithm embodied in the form of chip (chip) when processor (1120) is said of chip algorithm can be obtain. Step (1220) in, sensor (1140) is chamber number can be sensing data. Chamber sensing data number walk aid device (100) of sensors (120) and IMU (130) can be measured by each sensor data. For example, chamber number sensing data walk aid device (100) of a person wearing joint angle, walking speed data, as well as acceleration data walking, comprising at least one EMG signal data and ground with the can. Chamber number can be mutually corresponding to odd pixels of the kind of data sensed by a virtual sensing data. Step (1230) in, processor (1120) using data sensed by the chamber number can be adjusting algorithm. Figure 13 shows a method for adjusting algorithm according to one example using data sensed by a flow of number chamber also are disclosed. Step (1230) is below steps (1310 to 1380) can be comprising. Step (1310) in, processor (1120) is chamber number can be vector expression using the sensing data. Input vector for a virtual data sensed by a description is given of a method (step (710)) expression using the vector for a description is given of a method can be similarly applied. Step (1320) in, processor (1120) can be input vector features from elements. Extracting feature element description is given of a method step (720) can be applied similarly description is given. Step (1330) in, processor (1120) can be downsampled input vector. By down sampling input vector description is given of a method step (730) description is given can be similarly applied. Step (1340) in, processor (1120) is regulated so as to permit mutually corresponding number chamber and virtual data sensed by a sensing data can. Virtual sensing data generated since the thread number data generated through the use of simulation fore-aft kind can be more kinds of sensing, the seal number differs from the format of data sensed by a form of virtual data sensed by a number or user chamber can be regulated so as to permit mutually corresponding and virtual data sensed by a sensing data. Step (1350) in, processor (1120) is features element and the downsampled input vector for each of the preset walking state can be calculates. Description is given of a method for each of the preset walking state probability calculating step (740) description is given can be similarly applied. Step (1360) in, processor (1120) calculating error value based on the computing probability value can be. For example, processor (1120) is calculating error value using map learning method can be. As another alternative, processor (1120) - can be calculating error value using map learning method method-type cover. Step (1370) in, processor (1120) computing error value to decrease algorithm can be adjust at least one parameter. The adjustment of the parameters be a back propagation algorithm. Description is given of a method for adjusting algorithm parameter step (630) can be applied similarly description is given. Step (1380) in, processor (1120) can be comparing the error value and the threshold value. Algorithm for adjusting a threshold value of a learning threshold value algorithm may differ. For example, algorithm for adjusting a threshold value of a learning algorithm can be greater than the threshold value. Threshold value when the error value is hereinafter, learning algorithm can be terminated. Error value exceeding a threshold value, steps (1310 to 1370) can be re-performed. I.e., step (1230) error value is hereinafter can be iteratively performed until the threshold value. <Device utilization of learning algorithm> Method for implementing a learning algorithm can be taught on the device. This algorithm is learning device described below can be utilized in various ways. Below description is exemplary ephemeral, not limited. (1) server - client based algorithm learning device model (dispersion model) Dispersion model is server (150) model and adjusted by learning algorithm are disclosed. Dispersion model server (150) includes a learning algorithm device (300) and algorithm adjusting device (1100) can be both. Server (150) includes a learning algorithm device (300) through virtual sensing method and apparatus for organizing, using virtual data sensed by a learning algorithm (step 410 and 420) capable of. Server (150) algorithm includes adjusting device (1100) receives data sensed by a thread from client through the terminal number, chamber number (step 910 and 920) using data sensed by adjusting algorithm can be. Learning algorithm device (300) and algorithm adjusting device (1100) in individual device is described but, in the case of distributed model learning algorithm device (300) includes a device adjusting algorithm (1100) can be a. For example, processor (320) comprises a processor (1120) can be performs both operations. (2) learning algorithm for the terminal device comprising model (integration model) Integration model client terminal by learning algorithm model and adjusted are disclosed. For example, walk aid the client terminal device (100) can be included. Client terminal device learning algorithm (300) through virtual sensing method and apparatus for organizing, using virtual data sensed by a learning algorithm (step 410 and 420) capable of. Client terminal device adjusting algorithm (1100) through chamber number sensing method and apparatus for organizing, chamber number (step 1010 and 1020) using data sensed by adjusting algorithm can be. Learning algorithm device (300) and algorithm adjusting device (1100) in individual device is described but, in the case of integration model learning algorithm device (300) includes a device adjusting algorithm (1100) can be a. For example, processor (320) comprises a processor (1120) can be performs both operations. (3) combining distributed - integrated hybrid model Hybrid (hybrid) model is server (150) by algorithm learned and, client terminal by algorithm-adiustable model are disclosed. In the case of hybrid model, learning algorithm device (300) connects the server (150) which is contained in, algorithm adjusting device (1100) is included in device can be understood to each client terminal. For example, server (150) includes a learning algorithm device (300) through virtual sensing method and apparatus for organizing, using virtual data sensed by a learning algorithm (step 410 and 420) capable of. Client terminal device adjusting algorithm (1100) through chamber number sensing method and apparatus for organizing, chamber number (step 1010 and 1020) using data sensed by adjusting algorithm can be. Algorithm adjusting device (1100) adjustable initial algorithm learning algorithm device (300) is learnt by algorithm. Initial algorithm can be implemented in the form of stored data or chip or client terminal. In the embodiment according to method can be carried out through various computational means embodied in the form of computer-readable medium recording program instructions can be. Said computer-readable medium program instructions, data files, data structure or the like can be either alone or in combination. Said program instructions recorded on a recording medium in the embodiment is specially designed and constructed for those computer software that may be enable or publicly known to one skilled in the disapproval. Examples of computer-readable recording medium hard disk, floppy disk and magnetic medium (magnetic media) such as tapes, CD-a ROM, DVD (optical media) such as optical recording medium, such as magnetic - flop mote curl disk (floptical disk) optical medium (magneto-a optical media), and ROM (ROM), ram (RAM), such as flash memory and executing program instructions stored to hardware device specially configured multiple myelomas are included. Examples of such as machine code by a compiler program instructions are made can be carried out by a computer as well as interpreter order currently used in conventional language code comprises brilliance. Said one or more software modules for performing the operation of the hardware device in the embodiment is configured to operate as can be, and vice-versa are disclosed. Although in the embodiment described by the drawing but than are defined, based on the modification and deformation in the art if said corresponding person with skill in the art various techniques can be applied. For example, techniques described herein or in a different order and are described method is carried out, and/or illustrating system, structure, device, such as a fixed or other method described component alone or in combination, or other suitable components or even replaced by uniformly substituted results can be achieved. Therefore, other implementations, those two pieces in the embodiment and claim other claims also carry on ranges. In the embodiment according to method can be carried out through various computational means embodied in the form of computer-readable medium recording program instructions can be. Said computer-readable medium program instructions, data files, data structure or the like can be either alone or in combination. Said program instructions recorded on a recording medium in the embodiment is specially designed and constructed for those computer software that may be enable or publicly known to one skilled in the disapproval. Examples of computer-readable recording medium hard disk, floppy disk and magnetic medium (magnetic media) such as tapes, CD-a ROM, DVD (optical media) such as optical recording medium, such as magnetic - flop mote curl disk (floptical disk) optical medium (magneto-a optical media), and ROM (ROM), ram (RAM), such as flash memory and executing program instructions stored to hardware device specially configured multiple myelomas are included. Examples of such as machine code by a compiler program instructions are made can be carried out by a computer as well as interpreter order currently used in conventional language code comprises brilliance. Said one or more software modules for performing the operation of the hardware device in the embodiment is configured to operate as can be, and vice-versa are disclosed. Although in the embodiment than in the embodiment described by the drawing but are limited to, if said person with skill in the art from the substrate in the art of various corresponding modifications and deformable disclosed. For example, techniques described herein or in a different order and are described method is carried out, and/or illustrating system, structure, device, such as a fixed or other method described component alone or in combination, or other suitable components or even replaced by uniformly substituted results can be achieved. 100: walk aid device 150: server 300: device learning algorithm 1100: algorithm adjusting device Provided are a method for teaching algorithm to recognize walking status of a user wearing a walking assistive device, and an apparatus therefor. The method and apparatus for learning algorithm create virtual sensing data associated with walking of a virtual human body model through dynamic simulation, and can teaching the algorithm using the virtual sensing date. COPYRIGHT KIPO 2017 Coated status algorithms performed by teaching device, walking through the fore-aft simulation (dynamic simulation) associated with generating virtual data sensed by a virtual human model (virtual sensing data); and using said virtual data sensed by a coated state recognition algorithm step including teaching (walking state), algorithm learning method. According to Claim 1, virtual data sensed by said generating step, said generating a virtual human body based on attributes of the virtual human model; generating a walking model based on said virtual human model and walking environment information; and said driving said walking on the basis of simulation generating virtual data sensed by said fore-aft; including a, method learning algorithm. According to Claim 2, virtual data sensed by said generating step, said virtual sensor (virtual sensor) further includes steps of associating a virtual human model, said virtual sensing data generated by said virtual sensor, algorithm learning method. According to Claim 1, said virtual sensing data said virtual human model joint angle of, walking speed data, walking as well as acceleration data, including at least one of ground (ground reaction force) and with the electromyogram (elecromyographic; EMG) signal, algorithm learning method. According to Claim 1, said algorithm is in deep neural network (Deep Neural Network; DNN), learning algorithm method. According to Claim 5, said DNN deep convolutional neural network (Deep Convolution Neural Network; DCNN) or deep billets either leaf network (Deep Belief Network; DBN), learning algorithm method. According to Claim 1, said teaching step algorithm, said algorithm to said virtual sensing based on data calculating probability values for each of the preset walking state; label (label) and fore-aft simulation data based on said error value calculating likelihood values; and said adjusting at least one parameter of said algorithm to reduce error value including, algorithm learning method. According to Claim 7, said algorithm and system for teaching step, said preset value until the error value is hereinafter performed repeatedly (iteratively) than, algorithm learning method. According to Claim 7, said probability values step, using said virtual data sensed by generating input vector; extracting features from said input vector element; said down-sampling the input vector; and said feature element and the downsampled input vector including calculating said probability for each of the preset walking state, algorithm learning method. According to Claim 1, said teaching step algorithm, said algorithm encoded (encode) said virtual sensing data by generating compression information (compressed information); said compressed information decode (decode) generating a decode information (decoded information); and calculating said virtual data sensed by said decode error value between circuit network information; and said error value based on at least one parameter including adjusting said algorithm, algorithm learning method. According to Claim 10, said error values step, said virtual sensing data and said distance (Euclidean distance) between cross entropy (cross entropy) or type the D it will grow it froze decode information calculating either a, method learning algorithm. According to Claim 1, chamber number using said algorithm further including adjusting sensing data (real sensing data), learning algorithm method. According to Claim 12, the step of adjusting said algorithm, said chamber receiving sensing data from the external terminal number; and said chamber and said adjusting algorithm using data sensed by a number, the method said learning algorithm, said algorithm further including the steps of transmitting said adjusted external terminal, algorithm learning method. According to Claim 13, said wearable device in the external terminal (wearable device), learning algorithm method. According to Claim 13, said walk aid device in the external terminal (walking assistance device), learning algorithm method. According to Claim 12, the step of adjusting said algorithm, a person's gait sensor generating data sensed by a number a chamber; said chamber and said adjusting including using data sensed by a number algorithm, algorithm learning method. According to Claim 16, said chamber said joint angle of human sensing data number, walking speed data, walking as well as acceleration data, including at least one of force and EMG signal ground, algorithm learning method. Computer readable recording medium storing a program for performing any one of Claim 1 to Claim 17 method. Through the fore-simulation (dynamic simulation) associated with virtual data sensed by a virtual human model of gait (virtual sensing data) generating, using said virtual data sensed by a coated state (walking state) teaching that recognize an algorithm processor; and a memory for storing said algorithm including, algorithm learning device. Obtaining through virtual data sensed by a learning algorithm (virtual sensing data); a chamber (real sensing data) number data sensed by a sensor generating a person's gait; and adjusting said algorithm using data sensed by a number and said chamber, said virtual sensing data, walking through the fore-aft simulation (dynamic simulation) associated with virtual human model is produced, said algorithm, using said virtual data sensed by a coated state (walking state) compound is learning to perform signal processing, algorithm adjusting method. According to Claim 20, said neural network (Deep Neural Network; DNN) in deep algorithm, algorithm adjusting method. According to Claim 21, said DNN deep convolutional neural network (Deep Convolution Neural Network; DCNN) or deep billets in leaf network (Deep Belief Network; DBN), algorithm adjusting method. According to Claim 20, generating a number data sensed by said chamber, said chamber number data sensed by said sensor by a user of said terminal generating a, adjusting algorithm method. According to Claim 23, wearable device in said terminal (wearable device), algorithm adjusting method. According to Claim 23, walk aid device in said terminal (walking assistance device), algorithm adjusting method. According to Claim 20, said chamber said joint angle of human sensing data number, walking speed data, walking as well as acceleration data, including at least one of force and EMG signal ground, algorithm adjusting method. Computer readable recording medium storing a program for performing any one of Claim 20 to Claim 26 method. A memory which stores a learning algorithm through virtual data sensed by a (virtual sensing data); a chamber (real sensing data) number data sensed by a person's gait generating sensor; and said chamber using said algorithm processor number data sensed by adjusting said virtual sensing data, walking through the fore-aft simulation (dynamic simulation) associated with virtual human model is produced, said algorithm, using said virtual data sensed by a coated state (walking state) compound is learning to perform signal processing, algorithm adjusting device.