MOTOR MOUNT, MOTOR ASSEMBLY, ARM ASSEMBLY, AND UNMANNED AERIAL VEHICLE
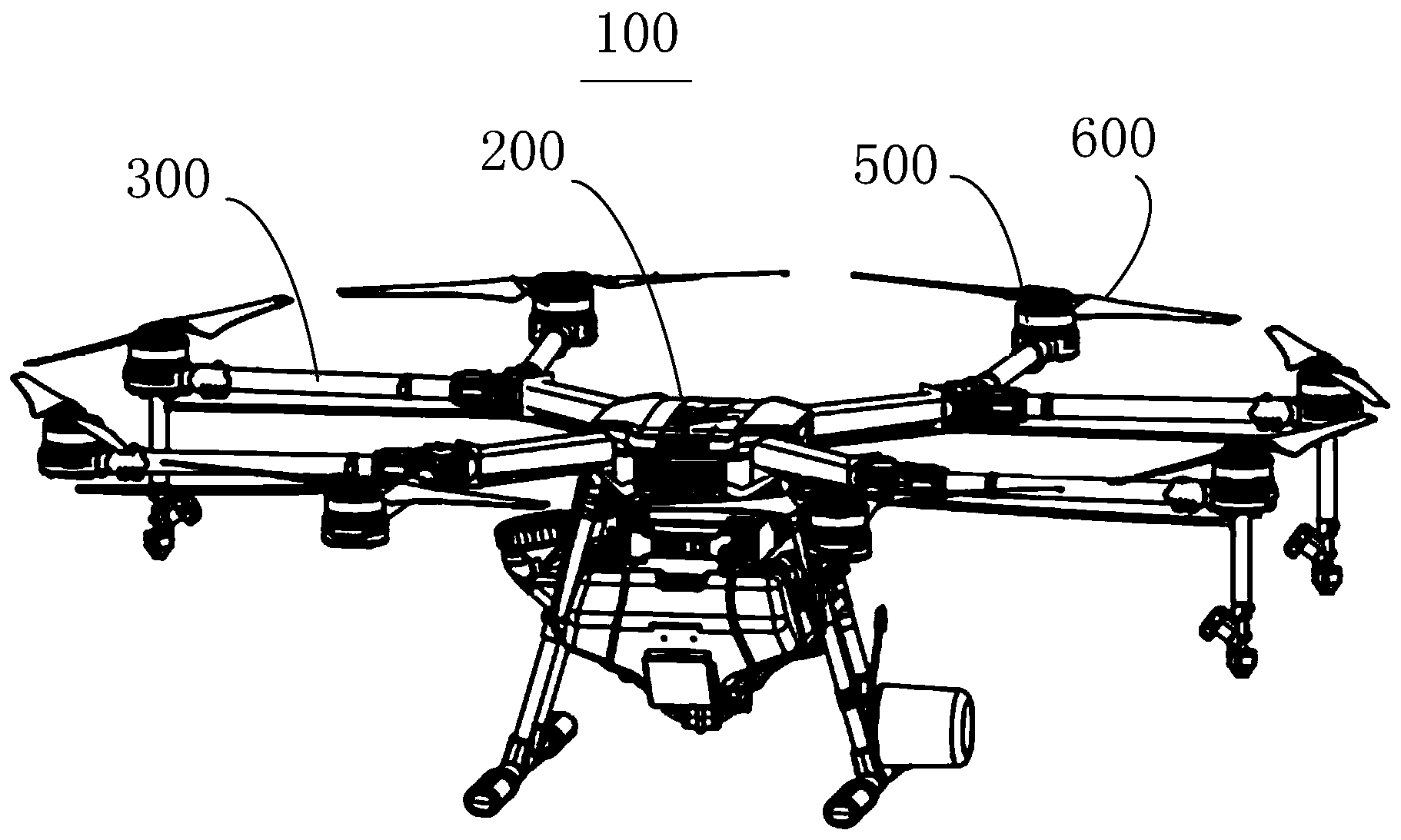
本申请涉及无人飞行器技术领域,尤其涉及一种电机安装座、电机组件、机臂组件及无人机。 植保无人机已经广泛地用于喷洒、施肥、灌溉等农林植保作业,不仅节省了大量人力,还对资源进行了有效利用。植保无人机通常都具有多个机臂、螺旋桨和安装于机臂上的电机。电机通常需要通过电机安装座将其固定在机臂上,以此来保证正常工作带动螺旋桨为所述无人机提供飞行动力。而传统的电机安装座结构复杂,当电机需要进行清洗维护或者发生故障需要维修更换时,须将电机安装座连同电机整体从机臂上拆下或者需要拆下电机安装座上连接的其它零部件才能卸下电机,过程繁琐不利于快速作业,用户体验感差。 发明内容 本申请提供了一种电机安装座、电机组件、机臂组件及无人机,旨在使电机能够快速安装或拆卸,以便于电机的维护或检修。 具体地,本发明是通过如下技术方案实现的: 根据本发明的第一方面,提供一种电机安装座,用于连接无人机的电机和机臂,包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据本发明的第二方面,提供一种电机组件,包括: 电机安装座,用于连接无人机的电机和机臂; 电机,安装于所述电机安装座上; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据本发明的第三方面,提供一种机臂组件,包括: 机臂; 电机安装座,安装于所述机臂上,用于连接无人机的电机和机臂; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据本发明的第四方面,提供一种无人机,包括: 机身; 机臂,安装于所述机身上; 电机安装座,安装于所述机臂上,用于连接无人机的电机和机臂; 电机,安装于所述电机安装座上; 螺旋桨,与所述电机连接; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 本申请提供的电机安装座、电机组件、机臂组件及无人机,由于电机安装座的安装部与电机可拆卸连接,夹持结构套设在机臂上,当电机发生故障需要维修时,无需将电机安装座与电机组成的整体从机臂上拆下再解除安装部与电机的连接,也无需在拆下电机安装座上连接的其他零部件后再拆卸电机,即可快速的将出现故障的电机更换为备用的电机或者快速更好电机中出现故障的部件,有效简化了电机维修过程,提高了维修效率,结构简单,并且也提升了用户的体验感。 为了更清楚地说明本申请实施例技术方案,下面将对实施例描述中所需要使用的附 图作简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。 图1是本申请一实施例提供的无人机的结构示意图; 图2是图1中的无人机的部分示意图,其中示出了机臂、电机安装座、电机保护壳、发光组件、电机、螺旋桨; 图3是图2的爆炸示意图; 图4为图3在A处的局部放大示意图; 图5为图3中电机安装座一角度的结构示意图; 图6为图3中电机安装座另一角度的结构示意图; 图7为图3中电机安装座再一角度的结构示意图; 图8为图7中电机安装座在B处的局部放大示意图。 附图标记说明: 100、无人机;200、机身; 300、机臂;310、插孔;320、第一开口;330、第二开口; 400、电机安装座;410、安装结构;411、承载部;412、安装部;413、承载梁;414、入口;415、第一部位;420、连接结构;421、连接部;422、第二间隙;423、加强部;424、加强板;425、通风口;430、夹持结构;431、夹持部;4311、通孔;4312、缺口;4313、第一自由端;4314、第二自由端;4315、第一侧面;4316、第二侧面;4317、内表面;4318、外表面;432、锁紧组件;4321、第一锁紧部;4322、第二锁紧部;4323、锁紧柱;4324、加强筋;4325、锁紧孔;433、定位孔部;4331、第一凹槽;4332、第二凹槽;434、开槽;435、装配部;440、定位结构;441、第一定位键;442、第二定位键;443、第三定位键;450、锁固结构;451、第一板体;452、锁固部;453、补强部;454、侧缺口; 500、电机;600、螺旋桨;700、第一间隙;800、电机保护壳; 900、发光组件;910、灯座;920、灯罩。 下面详细描述本申请的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本申请,而不能理解为对本申请的限制。 在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、 “厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。 请参阅图1,本申请实施例提供的无人机100,可用于农业植保,例如给农林作物或植物进行浇灌或喷洒农药、营养液等;无人机100也可用于搭载摄影机、相机等电子装置执行巡逻、勘探等任务。 可以理解的,无人机100可以为旋翼无人机、固定翼无人机、无人直升机或者固定翼-旋翼混合的无人机等。其中,旋翼无人机可为单旋翼飞行器、双旋翼飞行器、三旋翼飞行器、四旋翼飞行器、六旋翼飞行器、八旋翼飞行器、十旋翼飞行器、十二旋翼飞行器等。 请参阅图1至图3,本发明的某一方面的实施例提供一种无人机100。具体的,无人机100包括机身200、机臂300、电机安装座400、电机500和螺旋桨600。机臂300从机身200伸出,电机500通过电机安装座400安装于机臂300上。电机500与螺旋桨600连接,从而为无人机100提供飞行动力。 在本实施例中,无人机100为八旋翼无人飞行器。机臂300的数量为八个,电机安装座400、电机500和螺旋桨600的数量均与机臂300的数量相同,每一个机臂300上对应设有一个电机安装座400、电机500和螺旋桨600。可以理解的,在其他实施例中,电机安装座400、电机500和螺旋桨600可以根据实际需求设计其他任意合适的数量、类型或排布。 作为优选的实施方式,机臂300为中空结构,以降低无人机100的整机重量,提高续航时间。电机安装座400可以设置在机臂300的任意合适部位。例如,电机安装座400可以设置在机臂300的端部,也可以靠近机臂300的端部设置。 可以理解的,机臂300可以根据实际需求设计为任意形状,例如圆形管、方形管或者椭圆形管等。在本实施例中,机臂300为圆形管状结构。机臂300可以是采用碳纤维材料制成的碳管或者塑胶管等。 在某些实施方式中,将包括电机500和电机安装座400的部件进行组装,可以得到电机组件;再将螺旋桨600、电机组件、机臂300、机身200进行组装,可以得到无人 机100。在另一些实施方式中,将包括电机安装座400与机臂300的部件进行组装,可以得到机臂组件;再将螺旋桨600、电机500、机臂组件、机身200进行组装,可以得到无人机100。 实施例一 请参阅图3至图8,在本实施例中,电机安装座400包括安装结构410、连接结构420和夹持结构430。安装结构410与电机500可拆卸连接,夹持结构430与机臂300连接,无需将电机安装座400与电机500组成的整体从机臂300上拆下或拆下电机安装座400上连接的其他零部件,就能够将电机500快速拆卸,提高了电机500维修时的可操作性和维修效率,用户的体验感也由此得到提升。 请参阅图5至图8,其中,安装结构410具有承载部411以及安装部412。安装部412设于承载部411上,安装部412能够与电机500可拆卸连接。 安装部412的数量可以根据实际需求设计为任意合适的数量,例如一个、两个、三个、四个或者更多。当安装部412的数量为多个时,多个安装部412沿承载部411的周向间隔设置,以使电机500与电机安装座400安装稳固,保证电机500的正常运转。 为了使得电机500进一步稳固地安装在电机安装座400上,多个安装部412沿承载部411的周向等间隔设置,进一步保证电机500的正常运转。请参阅图5和图7,在本实施例中,四个安装部412间隔设置在以承载部411的中心为圆心的圆周上。 可以理解的,安装部412可以根据实际需求设计为任意合适结构,例如设计为包括安装孔、卡扣、卡槽等中的至少一种结构。 请参阅图5和图7,在本实施例中,安装部412为贯穿承载部411的安装孔。该安装孔与电机500底部的固定件相适配,实现电机500与电机安装座400的固定。安装孔可以根据实际需求进行设计为任意合适形状,例如圆形、直槽口形、方形、其他规则形状或不规则形状等。在本实施例中,安装孔的形状为圆形。 请参阅图2和图5,可以理解的,电机500与安装结构410装配后,电机500的下表面与安装结构410的上表面之间形成有第一间隙700,该第一间隙700能够增加空气流通的通道,提高电机500的散热效果。请参阅图5,在本实施例中,承载部411包括多个承载梁413,相邻两个承载梁413首尾连接,以使多个承载梁413围合形成一个入口414,电机500内部的空气可以经该入口414向外排出,加快电机500散热,保证电机500稳定地运行。在某些实施方式中,多个承载梁413一体成型。在其他实施方式中,多个承载梁413也可以根据实际需求选择任意合适的连接方式,例如通过焊接、螺钉紧固连接等方式。 可以理解的,在其他实施例中,承载部411的结构可以根据实际需求设计为任意其 他合适的结构,例如,设计为具有入口的板状结构,以利于电机散热即可。 请参阅图5和图7,作为优选的实施方式,安装结构410中用于与电机500连接的部位设于安装结构410中用于与连接结构420连接的部位背离安装结构410的中心的一侧,以防止连接结构420对安装部412造成干涉,因而使得电机500装拆方便,提高了维修的可操作性。 具体的,承载梁413中用于与连接结构420连接的部位为第一部位415,安装结构410中用于与电机500连接的部位即为安装部412。第一部位415位于安装部412朝向承载部411的中心的一侧。在电机500安装或拆卸时,只需要在连接结构420的外部进行操作即可,避免了连接结构420对安装部412造成干涉,不需要重复拆卸动作,提高了维修的可操作性。 请参阅图5至图7,连接结构420的上端连接至安装结构410,连接结构420的下端连接至夹持结构430上。 需要说明的是,本申请实施方式的描述中出现的上、下、底、顶等方位用语是电机安装座400和电机500安装于电子设备例如无人机以后,无人机常规运行姿态为参考,而不应认为具有限制性。 请参阅图5至图7,在本实施例中,连接结构420包括多个连接部421。连接部421的上端连接于安装结构410的第一部位415,连接部421的下端连接于夹持结构430。具体的,多个连接部421间隔设置形成镂空结构。该镂空结构与承载部411的入口414连通,相邻连接部421间隔形成第二间隙422,镂空结构内的空气能够经第二间隙422向外排出,提高电机500的散热效率。 请参阅图5至图7,为了提高连接结构420的强度,提高连接结构420抵抗形变的能力,连接结构420还包括加强部423和加强板424。加强部423设于连接部421背离连接结构420的中心的一侧,并沿连接部421的长度方向延伸设置。 可以理解的,加强部423可以根据实际需求设计为任意合适的形状,例如三角形、弧形、方形或其他不规则形状等。在本实施例中,加强部423的形状呈三角形。具体的,加强部423以尺寸逐渐减小的方式从靠近夹持结构430的一端向背离夹持结构430的一端延伸,以避免对电机500拆装的干涉,从而提高电机500维修的可操作性和维修效率。加强部423的数量可以根据实际需求设计为一个、两个或更多,本实施例不限于此。 在本实施例中,加强板424的数量为两个,两个加强板424相对设置,且每一个加强板424连接于两个连接部421之间。为了增加空气流通的通道,提高电机的散热效率,加强板424上还设有与连接结构420的镂空结构连通的通风口425。 可以理解的,在本实施例中,电机500所产生的热量的散发方式至少包括以下两种: 第一种散热方式:电机500的壳体、电机安装座400进行热交换、热辐射等方式进行传递散热。 第二种散热方式:安装结构410的入口414、连接结构420的镂空结构、通风口425以及相邻连接部421形成的第二间隙422形成散热通道,电机500内部的空气可以经该散热通道向外排出,以迅速降低电机500内部的温度,从而延长电机500的使用寿命,提高电机500的工作效率和工作稳定性。 请参阅图5至图7,夹持结构430包括夹持部431、锁紧组件432和定位孔部433。 其中,夹持部431与连接部421的下端连接。在本实施例中,夹持部431与连接部421一体成型。在其他实施例中,夹持部431与连接部421可以根据实际需求选择其他任意合适的连接方式,例如卡扣或螺钉锁固等方式。 请参阅图2、图5、图7和图8,夹持部431与机臂300可拆卸连接。夹持部431与机臂300的连接方式可以根据实际需求选择合适的连接方式,例如套接、卡接或插接或者一体成型等等。在本实施例中,机臂300插接于夹持部431内。 可以理解的,夹持部431可以根据实际需求设计为任意合适形状,例如封闭的环状结构、非封闭的环状结构、方形结构、椭圆形结构等,只要与机臂300适配即可。请参阅图5至图8,在本实施例中,夹持部431为非封闭的环状结构,即夹持部431具有通孔4311与缺口4312。在本实施方式中,通孔呈圆弧形通孔。缺口4312将通孔4311的内侧面隔断为非封闭的弧面,机臂300能够穿过通孔4311。换句话而言,夹持部431具有第一自由端4313和第二自由端4314,第一自由端4313与第二自由端4314间隔设置形成该缺口4312。 具体的,夹持部431包括第一侧面4315、第二侧面4316、内表面4317与外表面4318。第一侧面4315与第二侧面4316相对设置。其中,内表面4317为与机臂300接触的面,外表面4318为夹持部431背离内表面4317一侧所形成的表面。通孔4311贯穿第一侧面4315与第二侧面4316。缺口4312连通外表面4318与通孔4311。 请参阅图7和图8,在实施例中,锁紧组件432包括第一锁紧部4321和第二锁紧部4322。其中,第一锁紧部4321设于第一自由端4313。第二锁紧部4322设于第二自由端4314,并与第一锁紧部4321相对间隔设置。第一锁紧部4321与第二锁紧部4322通过螺栓等紧固件连接并锁紧,以使通孔4311的直径减小。当释放紧固件时,通孔4311的直径变大,此时能够调节机臂300与电机安装座400的装配位置。 具体的,第一锁紧部4321和第二锁紧部4322均包括锁紧柱4323和加强筋4324。在锁紧柱4323上设有锁紧孔4325,通过螺丝等紧固件穿设第一锁紧部4321的锁紧孔4325与第二锁紧部4322的锁紧孔4325,使通孔4311的直径通过螺钉的松紧程度得以 调整,从而能够适配不同轮廓尺寸的机臂300,结构简单,通用性强,实用性高。 可以理解的,锁紧组件432的数量可以根据实际需求进行设计,例如一个、两个、三个或者更多,能够从通孔4311的径向锁紧机臂300即可。当锁紧组件432的数量为多个时,多个锁紧组件432沿通孔4311的轴向间隔设置,以有效夹紧机臂300,保证机臂300与电机安装座400连接的可靠性。请参阅图7和图8,在本实施例中,锁紧组件432的数量为两个。 请参阅图7和图8,定位孔部433贯穿内表面4317与外表面4318,并与通孔4311连通。机臂300上设置有与定位孔部433对应设置的插孔310,结合件例如销轴穿设定位孔部433和插孔310,将机臂300与电机安装座400固定,防止机臂300沿夹持部431的轴向发生串动。可以理解的,在其他实施例中,结合件也可以是螺栓等任意其他合适的部件,能够穿设定位孔部433和插孔310,避免机臂在夹持部431的轴向发生串动即可。 具体的,定位孔部433包括第一凹槽4331和第二凹槽4332。其中,第一凹槽4331位于夹持部431的第一自由端4313,第二凹槽4332位于夹持部431的第二自由端4314。第一凹槽4331与第二凹槽4332相对设置,形成定位孔部433。 可以理解的,定位孔部433的数量可以根据实际需求设计不同数量,例如一个、两个、三个或者更多。当定位孔部433的数量为多个时,多个定位孔部433沿通孔4311的轴向间隔设置,连接件穿设不同位置的定位孔部433,能够实现调整电机安装座400与机臂300的安装位置。请参阅图7和图8,在本实施例中,定位孔部433的数量为两个,两个定位孔部433沿通孔4311的轴向间隔设置。 请参阅图5至图8,作为优选的实施方式,夹持结构430还包括开槽434,既能够使夹持结构430稳定地夹持机臂300,又能够节省原材料,减轻无人机100的整机重量,提高续航时间。开槽434设于夹持部431上,并与通孔4311连通。具体的,开槽434贯穿夹持部431的内表面4317和外表面4318,且开槽434位于夹持部431朝向安装结构410的一侧。 在本实施例中,安装结构410、连接结构420和夹持结构430为一体成型。在其他实施例中,安装结构410、连接结构420和夹持结构430也可以为独立的部件。 组装时,将机臂300插入电机安装座400的通孔4311上,将机臂300的插孔310与电机安装座400的定位孔部433对应,通过销轴等结合件穿设插孔310和定位孔部433,对机臂300进行轴向限位。通过螺丝等紧固件锁紧第一锁紧部4321和第二锁紧部4322,使得通孔4311的孔壁与机臂300的外表面紧密接触,实现对机臂300的周向限位,从而完成机臂300与电机安装座400的组装。通过连接件将电机500底部与安装部412连 接,以将电机500固定在电机安装座400上,即完成电机500、电机安装座400和机臂300的组装。 当电机500发生故障时,松开连接电机安装座400的安装部412与电机500的连接件,即可解除安装部412与电机500的连接,即可快速的将出现故障的电机更换为备用的电机或者快速更好电机中出现故障的部件,无需将电机安装座400与电机500组成的整体从机臂300上拆下或拆下电机安装座400上连接的其他零部件,有效简化了电机500维修过程,维修方便,提高了维修效率,并且也提升了用户的体验感。 本实施例提供的电机安装座400、电机组件、机臂组件及无人机,由于电机安装座400的安装部412与电机500可拆卸连接,夹持结构430套设在机臂200上,当电机500发生故障需要维修时,解除安装部412与电机500的连接,无需将电机安装座400与电机500组成的整体从机臂200上拆下或拆下电机安装座400上连接的其他零部件,即可快速的将出现故障的电机500更换为备用的电机500或者快速更好电机500中出现故障的部件,有效简化了电机500维修过程,提高了维修效率,结构简单,并且也提升了用户的体验感。 实施例二 请再次参阅图2至图8,实施例二的电机安装座400与实施例一的电机安装座400结构大致相同,其区别在于,本实施例在实施例一的基础上,夹持部431的内部还设有定位结构440,以防止机臂300沿夹持部431的周向转动。 具体的,请参阅图6和图7,定位结构440包括第一定位键441、第二定位键442和第三定位键443。在本实施例中,第一定位键441、第二定位键442和第三定位键443沿夹持部431的周向依次间隔设置。 在某些实施方式中,第一定位键441、第二定位键442和第三定位键443均为沿夹持部431的轴向延伸的凸条结构。在其他实施方式中,第一定位键441、第二定位键442和第三定位键443也可为沿夹持部431的轴向设置且彼此分隔的多段结构,只要能够防止机臂300沿夹持部431的周向转动即可。 可以理解的,在其他实施例中,第一定位键441、第二定位键442和第三定位键443可以根据实际需求设计为任意其他合适结构,例如设计为沿夹持部431的周向延伸的多个同心环状凸起等。 请参阅图4、图6和图7,在本实施例中,机臂300的一端设有第一开口320和第二开口330。第一开口320与第一定位键441配合,第二开口330与第三定位键443配合。锁紧组件432通过紧固件使得通孔4311的直径逐渐减小。当通孔4311的直径减小至第二定位键442抵接机臂时,继续锁紧锁紧组件432,此时,第二定位键442会施加 机臂300一沿通孔4311径向向内的作用力,使得夹持部431能够稳固地夹持机臂300,提高无人机100飞行时的安全性。 可以理解的,在其他实施例中,定位结构440也可以根据实际需求设计为其他任意合适结构,例如在夹持部431上设计第一开口和第二开口,机臂300上相应设置与第一开口配合的第一定位键以及与第二开口配合的第三定位键,只要能够防止机臂300沿周向转动即可。 第一定位键441、第二定位键442和第三定位键443可以根据实际需求设于夹持部431的内表面4317的任意合适位置。请参阅图6和图7,在本实施例中,第二定位键442设于夹持部431的周向的中部,第一定位键441和第三定位键443对称设置于第二定位键442的两侧。 为了进一步保证机臂300稳固地安装于夹持部431上,第一定位键441和第三定位键443关于夹持部的中心对称,第一定位键441和第三定位键443对称设置于第二定位键442的两侧。 请参阅图6和图7,由于第二定位键442所在位置承受的力大于夹持部431的其他位置所承受的力,因而,第二定位键442设计为由包括至少两个间隔平行且沿夹持部431的轴向延伸的凸条组成,以增加第二定位键442的强度,避免因第二定位键442损坏,而需要更换电机安装座400。在本实施例中,第二定位键442由两个凸条组成,第一定位键441和第三定位键443均由一个沿夹持部431的轴向延伸的凸条组成。 可以理解的,在其他实施例中,第一定位键441、第二定位键442和第三定位键443的形状可以根据实际需求设置为其他结构,例如环状凸起、块状凸起、柱状凸起或者弧状凸起结构。 组装时,将机臂300插入电机安装座400的通孔4311上,第一定位键441、第三定位键443分别对应第一开口320和第二开口330,机臂300的插孔310对应电机安装座400的定位孔部433,通过销轴等连接件穿设插孔310和定位孔部433,对机臂300进行轴向限位。通过螺丝等紧固件锁紧第一锁紧部4321和第二锁紧部4322,使得通孔4311的孔壁与机臂300的外表面紧密接触,实现对机臂300的周向限位,从而完成机臂300与电机安装座400的组装。通过连接件将电机500底部与安装部412连接,以将电机500固定在电机安装座400上,即完成电机500、电机安装座400和机臂300的组装。 实施例三 请参阅图2、图3、图5、图6和图7,无人机在飞行作业时,电机容易受到强烈撞击而遭到损坏。为了吸收冲击或振动,避免电机因遭受撞击而损坏,本实施例在实施例一的基础上,电机安装座400还包括锁固结构450,锁固结构450设于承载部411上。 该锁固结构450与套设于电机安装座400的外部的电机保护壳800连接。 具体的,请参阅图5至图7,锁固结构450包括第一板体451和锁固部452。其中,第一板体451自承载部411背离中心的一侧向外延伸。锁固部452设于第一板体451背离承载部的一端。锁固部452可以根据实际需求设计为锁固孔、卡槽、卡扣中的至少一种结构。在本实施例中,锁固部452为锁固孔。螺丝等部件穿设电机保护壳800上的相应部位和锁固孔,将电机保护壳800固定于电机安装座400的外部。 请参阅图5和图7,作为优选的实施方式,为了加强锁固结构450的强度,锁固结构450还包括补强部453,其连接于锁固部452与承载部411。补强部453可以根据实际需求设计为任意合适的形状,例如弧形、方形或其他不规则形状等。 在本实施例中,锁固结构450和承载部411为一体式设计。可以理解的,在其他实施例中,锁固结构450和承载部411也可以是独立部件。 锁固结构450的数量可以根据实际需求设计为任意合适的数量,能够将电机安装座400和电机保护壳800固定即可。在本实施例中,锁固结构450的数量为两个,两个锁固结构450对称设置于安装结构410的相对两侧,以使电机保护壳800稳定地固定在电机安装座400上。 请参阅图7,锁固结构450与承载部411围合形成侧缺口454。当电机保护壳800安装于电机安装座400上时,侧缺口454能够允许空气流通,将电机安装座400内的空气排出,从而提高了电机的散热效率。 实施例四 请再次参阅图2、图3、图5、图6和图7,实施例四的电机安装座400与实施例三的电机安装座400结构大致相同,其区别在于,本实施例在实施例一的基础上,本实施例在实施例三的基础上,夹持结构430还包括装配部435,其设于夹持部431背离安装结构410的一侧,用于安装无人机100的发光组件900。 请参阅图2、图3、图6和图7,在某些实施方式中,发光组件900包括灯座910及灯罩920,灯座910安装在装配部435上,灯罩920安装在电机保护壳800上,且灯座910与灯罩920对应设置,灯座910的发光件例如发光二极管与电子调速器电连接。当无人机100在夜间飞行时,发光组件900能够发出光线,以提醒用户无人机的所在位置。装配部435与发光组件900可以根据实际需求选择任意合适的连接方式,例如卡扣、螺纹连接等。在本实施例中,装配部435为装配孔,通过通锁紧件穿设装配部435与灯座910,将发光组件900与电机安装座400进行固定。 本发明第二方面提供的电机组件、本发明第三方面提供的机臂组件和本发明第四方面提供的无人机,均包括上述多个实施例描述的电机安装座400,因而具有上述任一技 术方案所具有的一切有益的技术效果,在此不再赘述。 在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。 在本申请中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。 上文的公开提供了许多不同的实施方式或例子用来实现本申请的不同结构。为了简化本申请的公开,上文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本申请。此外,本申请可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本申请提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。 在本说明书的描述中,参考术语“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合实施方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。 尽管已经示出和描述了本申请的实施方式,本领域的普通技术人员可以理解:在不脱离本申请的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本申请的范围由权利要求及其等同物限定。 A motor mount (400), a motor assembly, an arm assembly, and an unmanned aerial vehicle (100). The motor mount is used for connecting a motor (500) and an arm (300) of the unmanned aerial vehicle, and comprises: a mounting structure (410) having a bearing part (411) and a mounting part (412) provided on the bearing part, the mounting part being detachably connected to the motor; a connection structure (420), the upper end of the connection structure being connected to the mounting structure; and a clamping structure (430), the clamping structure being a non-closed annular structure connected to the lower end of the connection structure and being used for clamping the arm. 一种电机安装座,用于连接无人机的电机和机臂,其特征在于,包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据权利要求1所述的电机安装座,其特征在于,所述安装部的数量为多个,多个所述安装部沿所述承载部的周向间隔设置。 根据权利要求2所述的电机安装座,其特征在于,多个所述安装部沿所述承载部的周向等间隔设置。 根据权利要求1所述的电机安装座,其特征在于,所述安装部包括以下至少一种:安装孔、卡扣、卡槽。 根据权利要求1所述的电机安装座,其特征在于,所述承载部包括: 多个承载梁,相邻两个所述承载梁首尾连接。 根据权利要求5所述的电机安装座,其特征在于,所述承载梁中用于与所述连接结构连接的部位设于所述安装部朝向所述承载部的中心的一侧。 根据权利要求5所述的电机安装座,其特征在于,所述电机安装座还包括: 锁固结构,设于所述安装结构上,用于与无人机的电机保护壳连接。 根据权利要求7所述的电机安装座,其特征在于,所述锁固结构包括: 第一板体,自所述承载部背离中心的一侧向外延伸; 锁固部,设于所述第一板体背离所述承载部的一端,用于与无人机的电机保护壳连接。 根据权利要求7所述的电机安装座,其特征在于,所述锁固结构的数量为两个,两个所述锁固结构对称设置于所述安装结构的相对两侧。 根据权利要求1所述的电机安装座,其特征在于,所述夹持结构包括: 夹持部,具有通孔以及连通所述夹持部的外表面与所述通孔部的缺口; 锁紧组件,设于所述夹持部的缺口处,以改变所述通孔的大小,从而使所述夹持结构能够通过所述夹持部夹紧无人机的机臂。 根据权利要求10所述的电机安装座,其特征在于,所述夹持部具有第一自由端和第二自由端;所述锁紧组件包括: 第一锁紧部,设于所述第一自由端; 第二锁紧部,设于所述第二自由端,并与所述第一锁紧部相对间隔设置;所述第一锁紧部与所述第二锁紧部通过紧固件连接并锁紧,以使所述通孔部的尺寸减小。 根据权利要求10所述的电机安装座,其特征在于,所述锁紧组件的数量为至少两个,至少两个所述锁紧组件沿所述夹持部的径向间隔设置。 根据权利要求10所述的电机安装座,其特征在于,所述夹持结构还包括: 定位孔部,贯穿所述夹持部,并与所述通孔连通。 根据权利要求13所述的电机安装座,其特征在于,所述定位孔部包括: 第一凹槽,设于所述第一自由端; 第二凹槽,设于所述第二自由端,并与所述第一凹槽相对设置。 根据权利要求13所述的电机安装座,其特征在于,所述定位孔部的数量为多个,多个所述定位孔部沿所述夹持部的径向间隔设置。 根据权利要求13所述的电机安装座,其特征在于,所述夹持部的内壁设有沿所述夹持部的周向依次间隔设置的第一定位键、第二定位键和第三定位键,以防止所述机臂沿周向转动。 根据权利要求16所述的电机安装座,其特征在于,所述第二定位键设于所述夹持部的周向的中部,所述第一定位键和所述第三定位键对称设置于所述第二定位键的两侧。 根据权利要求16所述的电机安装座,其特征在于,所述第一定位键、所述第二定位键和所述第三定位键均为沿所述夹持部的轴向延伸的凸条结构。 根据权利要求18所述的电机安装座,其特征在于,所述第二定位键的数量为两个,所述第一定位键的数量和所述第三定位键的数量均为一个。 根据权利要求10所述的电机安装座,其特征在于,所述夹持结构还包括: 开槽,设于所述夹持部上,并与所述通孔连通。 根据权利要求10所述的电机安装座,其特征在于,所述夹持结构还包括: 装配部,设于所述夹持部背离所述安装结构的一侧,用于安装无人机的发光组件。 根据权利要求1所述的电机安装座,其特征在于,所述连接结构包括: 多个间隔设置的连接部,连接于所述夹持结构和所述安装结构。 根据权利要求22所述的电机安装座,其特征在于,所述连接结构还包括: 加强部,设于所述连接部上,并沿所述连接部的长度方向延伸设置。 一种电机组件,其特征在于,包括: 电机安装座,用于连接无人机的电机和机臂; 电机,安装于所述电机安装座上; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据权利要求24所述的电机组件,其特征在于,所述安装部的数量为多个,多个所述安装部沿所述承载部的周向间隔设置。 根据权利要求25所述的电机组件,其特征在于,多个所述安装部沿所述承载部的周向等间隔设置。 根据权利要求24所述的电机组件,其特征在于,所述安装部包括以下至少一种:安装孔、卡扣、卡槽。 根据权利要求24所述的电机组件,其特征在于,所述承载部包括: 多个承载梁,相邻两个所述承载梁首尾连接。 根据权利要求28所述的电机组件,其特征在于,所述承载梁中用于与所述连接结构连接的部位设于所述安装部朝向所述承载部的中心的一侧。 根据权利要求28所述的电机组件,其特征在于,所述电机安装座还包括: 锁固结构,设于所述安装结构上,用于与无人机的电机保护壳连接。 根据权利要求30所述的电机组件,其特征在于,所述锁固结构包括: 第一板体,自所述承载部背离中心的一侧向外延伸; 锁固部,设于所述第一板体背离所述承载部的一端,用于与无人机的电机保护壳连接。 根据权利要求30所述的电机组件,其特征在于,所述锁固结构的数量为两个,两个所述锁固结构对称设置于所述安装结构的相对两侧。 根据权利要求24所述的电机组件,其特征在于,所述夹持结构包括: 夹持部,具有通孔以及连通所述夹持部的外表面与所述通孔部的缺口; 锁紧组件,设于所述夹持部的缺口处,以改变所述通孔的大小,从而使所述夹持结构能够通过所述夹持部夹紧无人机的机臂。 根据权利要求33所述的电机组件,其特征在于,所述夹持部具有第一自由端和第二自由端;所述锁紧组件包括: 第一锁紧部,设于所述第一自由端; 第二锁紧部,设于所述第二自由端,并与所述第一锁紧部相对间隔设置;所述第一锁紧部与所述第二锁紧部通过紧固件连接并锁紧,以使所述通孔部的尺寸减小。 根据权利要求33所述的电机组件,其特征在于,所述锁紧组件的数量为至少两个,至少两个所述锁紧组件沿所述夹持部的径向间隔设置。 根据权利要求33所述的电机组件,其特征在于,所述夹持结构还包括: 定位孔部,贯穿所述夹持部,并与所述通孔连通。 根据权利要求36所述的电机组件,其特征在于,所述定位孔部包括: 第一凹槽,设于所述第一自由端; 第二凹槽,设于所述第二自由端,并与所述第一凹槽相对设置。 根据权利要求36所述的电机组件,其特征在于,所述定位孔部的数量为多个,多个所述定位孔部沿所述夹持部的径向间隔设置。 根据权利要求36所述的电机组件,其特征在于,所述夹持部的内壁设有沿所述夹持部的周向依次间隔设置的第一定位键、第二定位键和第三定位键,以防止所述机臂沿周向转动。 根据权利要求39所述的电机组件,其特征在于,所述第二定位键设于所述夹持部的周向的中部,所述第一定位键和所述第三定位键对称设置于所述第二定位键的两侧。 根据权利要求39所述的电机组件,其特征在于,所述第一定位键、所述第二定位键和所述第三定位键均为沿所述夹持部的轴向延伸的凸条结构。 根据权利要求41所述的电机组件,其特征在于,所述第二定位键的数量为两个,所述第一定位键的数量和所述第三定位键的数量均为一个。 根据权利要求33所述的电机组件,其特征在于,所述夹持结构还包括: 开槽,设于所述夹持部上,并与所述通孔连通。 根据权利要求33所述的电机组件,其特征在于,所述夹持结构还包括: 装配部,设于所述夹持部背离所述安装结构的一侧,用于安装无人机的发光组件。 根据权利要求24所述的电机组件,其特征在于,所述连接结构包括: 多个间隔设置的连接部,连接于所述夹持结构和所述安装结构。 根据权利要求45所述的电机组件,其特征在于,所述连接结构还包括: 加强部,设于所述连接部上,并沿所述连接部的长度方向延伸设置。 一种机臂组件,其特征在于,包括: 机臂; 电机安装座,安装于所述机臂上,用于连接无人机的电机和机臂; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据权利要求47所述的机臂组件,其特征在于,所述安装部的数量为多个,多个所述安装部沿所述承载部的周向间隔设置。 根据权利要求48所述的机臂组件,其特征在于,多个所述安装部沿所述承载部的周向等间隔设置。 根据权利要求47所述的机臂组件,其特征在于,所述安装部包括以下至少一种:安装孔、卡扣、卡槽。 根据权利要求47所述的机臂组件,其特征在于,所述承载部包括: 多个承载梁,相邻两个所述承载梁首尾连接。 根据权利要求51所述的机臂组件,其特征在于,所述承载梁中用于与所述连接结构连接的部位设于所述安装部朝向所述承载部的中心的一侧。 根据权利要求51所述的机臂组件,其特征在于,所述电机安装座还包括: 锁固结构,设于所述安装结构上,用于与无人机的电机保护壳连接。 根据权利要求53所述的机臂组件,其特征在于,所述锁固结构包括: 第一板体,自所述承载部背离中心的一侧向外延伸; 锁固部,设于所述第一板体背离所述承载部的一端,用于与无人机的电机保护壳连接。 根据权利要求53所述的机臂组件,其特征在于,所述锁固结构的数量为两个,两个所述锁固结构对称设置于所述安装结构的相对两侧。 根据权利要求47所述的机臂组件,其特征在于,所述夹持结构包括: 夹持部,具有通孔以及连通所述夹持部的外表面与所述通孔部的缺口; 锁紧组件,设于所述夹持部的缺口处,以改变所述通孔的大小,从而使所述夹持结构能够通过所述夹持部夹紧无人机的机臂。 根据权利要求56所述的机臂组件,其特征在于,所述夹持部具有第一自由端和第二自由端;所述锁紧组件包括: 第一锁紧部,设于所述第一自由端; 第二锁紧部,设于所述第二自由端,并与所述第一锁紧部相对间隔设置;所述第一锁紧部与所述第二锁紧部通过紧固件连接并锁紧,以使所述通孔部的尺寸减小。 根据权利要求56所述的机臂组件,其特征在于,所述锁紧组件的数量为至少两个,至少两个所述锁紧组件沿所述夹持部的径向间隔设置。 根据权利要求56所述的机臂组件,其特征在于,所述夹持结构还包括: 定位孔部,贯穿所述夹持部,并与所述通孔连通。 根据权利要求59所述的机臂组件,其特征在于,所述定位孔部包括: 第一凹槽,设于所述第一自由端; 第二凹槽,设于所述第二自由端,并与所述第一凹槽相对设置。 根据权利要求59所述的机臂组件,其特征在于,所述定位孔部的数量为多个,多个所述定位孔部沿所述夹持部的径向间隔设置。 根据权利要求59所述的机臂组件,其特征在于,所述夹持部的内壁设有沿所述夹持部的周向依次间隔设置的第一定位键、第二定位键和第三定位键,以防止所述机臂沿周向转动。 根据权利要求62所述的机臂组件,其特征在于,所述第二定位键设于所述夹持部的周向的中部,所述第一定位键和所述第三定位键对称设置于所述第二定位键的两侧。 根据权利要求62所述的机臂组件,其特征在于,所述第一定位键、所述第二定位键和所述第三定位键均为沿所述夹持部的轴向延伸的凸条结构。 根据权利要求64所述的机臂组件,其特征在于,所述第二定位键的数量为两个,所述第一定位键的数量和所述第三定位键的数量均为一个。 根据权利要求56所述的机臂组件,其特征在于,所述夹持结构还包括: 开槽,设于所述夹持部上,并与所述通孔连通。 根据权利要求56所述的机臂组件,其特征在于,所述夹持结构还包括: 装配部,设于所述夹持部背离所述安装结构的一侧,用于安装无人机的发光组件。 根据权利要求47所述的机臂组件,其特征在于,所述连接结构包括: 多个间隔设置的连接部,连接于所述夹持结构和所述安装结构。 根据权利要求68所述的机臂组件,其特征在于,所述连接结构还包括: 加强部,设于所述连接部上,并沿所述连接部的长度方向延伸设置。 一种无人机,其特征在于,包括: 机身; 机臂,安装于所述机身上; 电机安装座,安装于所述机臂上,用于连接无人机的电机和机臂; 电机,安装于所述电机安装座上; 螺旋桨,与所述电机连接; 其中,所述电机安装座包括: 安装结构,具有承载部以及设于所述承载部上的安装部,所述安装部用于与所述电机可拆卸连接; 连接结构,所述连接结构的上端连接至所述安装结构; 夹持结构,为非封闭的环状结构,与所述连接结构的下端连接,用于夹持所述机臂。 根据权利要求70所述的无人机,其特征在于,所述安装部的数量为多个,多个所述安装部沿所述承载部的周向间隔设置。 根据权利要求71所述的无人机,其特征在于,多个所述安装部沿所述承载部的周向等间隔设置。 根据权利要求70所述的无人机,其特征在于,所述安装部包括以下至少一种:安装孔、卡扣、卡槽。 根据权利要求70所述的无人机,其特征在于,所述承载部包括: 多个承载梁,相邻两个所述承载梁首尾连接。 根据权利要求74所述的无人机,其特征在于,所述承载梁中用于与所述连接结构连接的部位设于所述安装部朝向所述承载部的中心的一侧。 根据权利要求74所述的无人机,其特征在于,所述电机安装座还包括: 锁固结构,设于所述安装结构上,用于与无人机的电机保护壳连接。 根据权利要求76所述的无人机,其特征在于,所述锁固结构包括: 第一板体,自所述承载部背离中心的一侧向外延伸; 锁固部,设于所述第一板体背离所述承载部的一端,用于与无人机的电机保护壳连接。 根据权利要求76所述的无人机,其特征在于,所述锁固结构的数量为两个,两个所述锁固结构对称设置于所述安装结构的相对两侧。 根据权利要求70所述的无人机,其特征在于,所述夹持结构包括: 夹持部,具有通孔以及连通所述夹持部的外表面与所述通孔部的缺口; 锁紧组件,设于所述夹持部的缺口处,以改变所述通孔的大小,从而使所述夹持结构能够通过所述夹持部夹紧无人机的机臂。 根据权利要求79所述的电无人机,其特征在于,所述夹持部具有第一自由端和 第二自由端;所述锁紧组件包括: 第一锁紧部,设于所述第一自由端; 第二锁紧部,设于所述第二自由端,并与所述第一锁紧部相对间隔设置;所述第一锁紧部与所述第二锁紧部通过紧固件连接并锁紧,以使所述通孔部的尺寸减小。 根据权利要求79所述的无人机,其特征在于,所述锁紧组件的数量为至少两个,至少两个所述锁紧组件沿所述夹持部的径向间隔设置。 根据权利要求79所述的无人机,其特征在于,所述夹持结构还包括: 定位孔部,贯穿所述夹持部,并与所述通孔连通。 根据权利要求82所述的无人机,其特征在于,所述定位孔部包括: 第一凹槽,设于所述第一自由端; 第二凹槽,设于所述第二自由端,并与所述第一凹槽相对设置。 根据权利要求82所述的无人机,其特征在于,所述定位孔部的数量为多个,多个所述定位孔部沿所述夹持部的径向间隔设置。 根据权利要求82所述的无人机,其特征在于,所述夹持部的内壁设有沿所述夹持部的周向依次间隔设置的第一定位键、第二定位键和第三定位键,以防止所述机臂沿周向转动。 根据权利要求85所述的无人机,其特征在于,所述第二定位键设于所述夹持部的周向的中部,所述第一定位键和所述第三定位键对称设置于所述第二定位键的两侧。 根据权利要求85所述的无人机,其特征在于,所述第一定位键、所述第二定位键和所述第三定位键均为沿所述夹持部的轴向延伸的凸条结构。 根据权利要求87所述的无人机,其特征在于,所述第二定位键的数量为两个,所述第一定位键的数量和所述第三定位键的数量均为一个。 根据权利要求79所述的无人机,其特征在于,所述夹持结构还包括: 开槽,设于所述夹持部上,并与所述通孔连通。 根据权利要求79所述的无人机,其特征在于,所述夹持结构还包括: 装配部,设于所述夹持部背离所述安装结构的一侧,用于安装无人机的发光组件。 根据权利要求70所述的无人机,其特征在于,所述连接结构包括: 多个间隔设置的连接部,连接于所述夹持结构和所述安装结构。 根据权利要求91所述的无人机,其特征在于,所述连接结构还包括: 加强部,设于所述连接部上,并沿所述连接部的长度方向延伸设置。技术领域
背景技术
附图说明
具体实施方式