Opportunistische ladesysteme und -verfahren fürelektrofahrzeuge
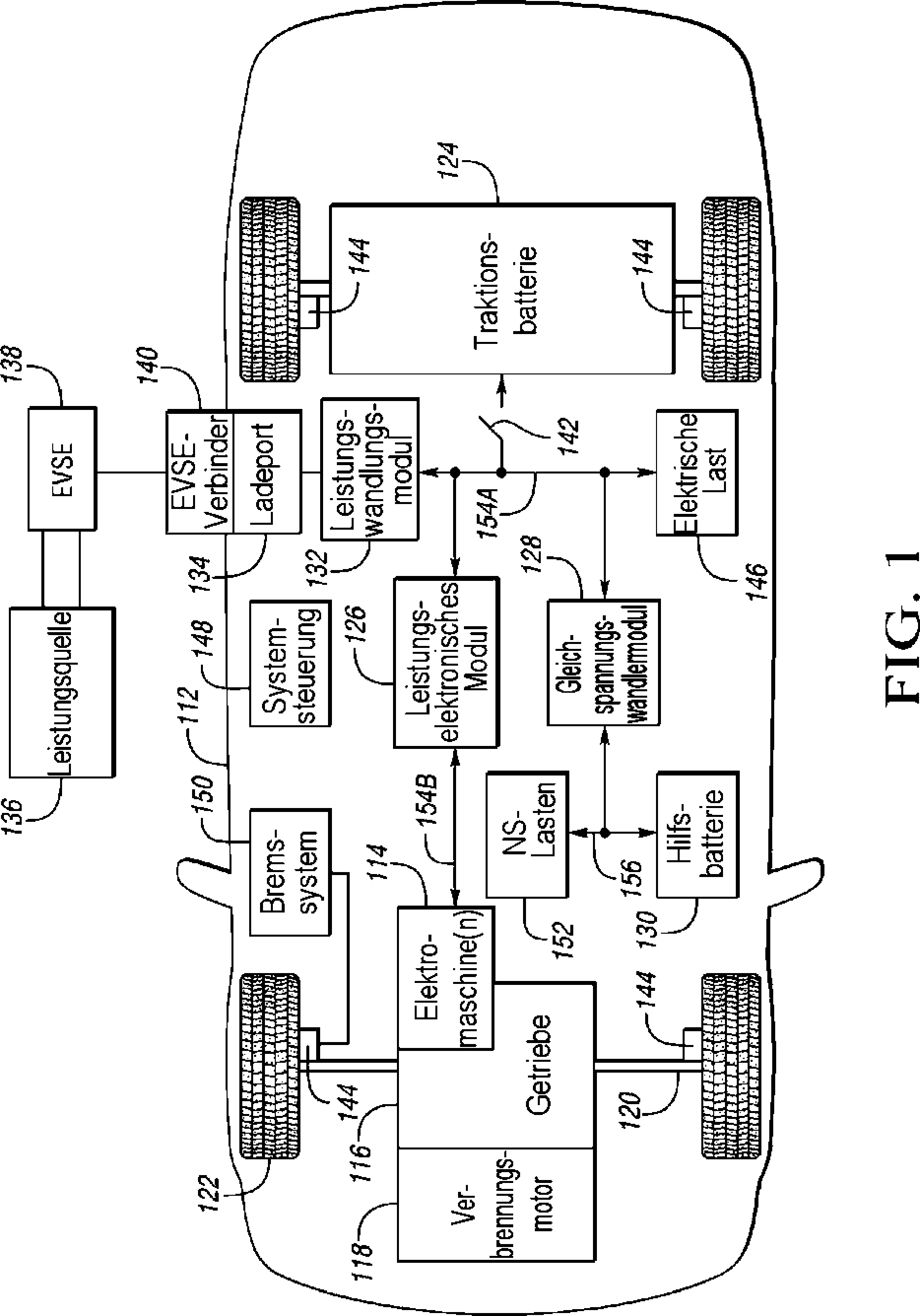
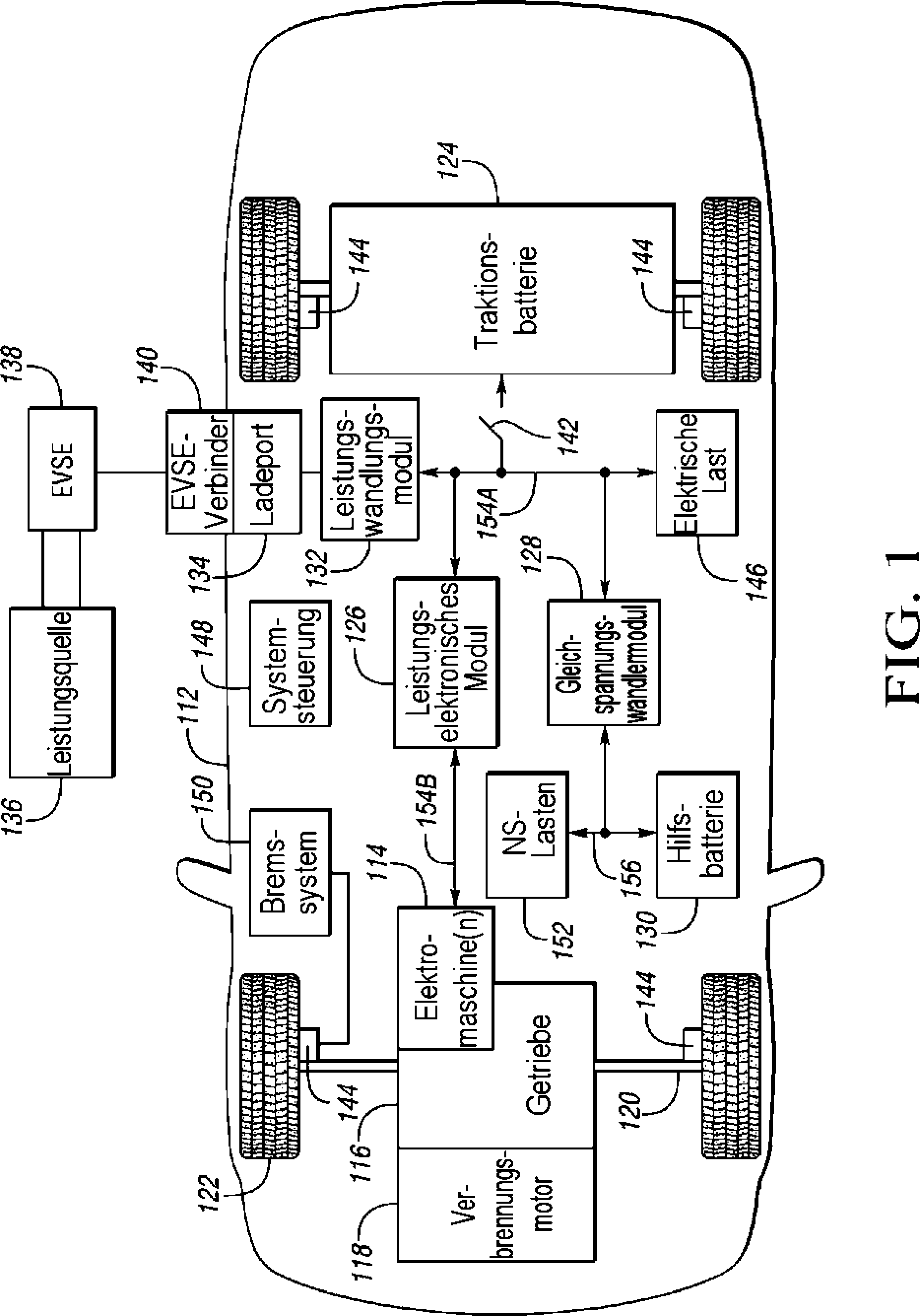
Diese Anwendung bezieht sich im Allgemeinen auf das Laden einer Traktionsbatterie eines Hybridelektrofahrzeugs unter Verwendung eines Verbrennungsmotors. Hybridelektrofahrzeuge können einen Motor mit innerer Verbrennung (ICE, Internal Combustion Engine), wenigstens eine Elektromaschine, die als ein elektrischer Motor oder als ein elektrischer Generator konfiguriert sein kann, und eine Traktionsbatterie enthalten. Die Traktionsbatterie stellt der Elektromaschine Leistung zum Antrieb bereit und versorgt gewisse Zubehörlasten. Fahrzeuge, die eine Hochspannungs-Traktionsbatterie nutzen, können als elektrisch betriebene Fahrzeuge bezeichnet werden. Die Traktionsbatterie weist einen Ladezustand (SOC, State of Charge) auf, der angibt, wie viel elektrische Ladung in der Batterie gehalten wird. Um den SOC zu erhöhen, kann ein Hybridelektrofahrzeug mehrere Verfahren einsetzen, einschließlich das Laden der Traktionsbatterie unter Verwendung des Impulses des Fahrzeugs, um einen Generator anzutreiben, Betreiben des ICE, um die als ein Generator konfigurierte Elektromaschine anzutreiben, und elektrisches Koppeln der Traktionsbatterie mit einer externen Ladequelle, was auch als „Plug-in“ (Anschließen) des Autos bezeichnet wird. Das Wiederladen der Traktionsbatterie unter Verwendung des ICE kann erhöhten Kraftstoffverbrauch bewirken. In wenigstens einer Ausführungsform enthält ein Fahrzeug einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben, und eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen das Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen. Das Fahrzeug enthält auch eine Steuerung, die dazu programmiert ist, einen Befehl auszugeben, um das Verbrennungsmotorausgangsdrehmoment und eine Ausgangsdrehzahl entsprechend einem vorbestimmten optimalen spezifischen Kraftstoffverbrauch einzustellen, während sie Leistung zum Laden der Traktionsbatterie bereitstellt, einen Zubehörleistungsbedarf erfüllt und das Fahrzeug antreibt. In wenigstens einer Ausführungsform enthält das Fahrzeug einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben, und eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen das Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen. Das Fahrzeug enthält auch eine Steuerung, die dazu programmiert ist, eine Leistungsabgabe des Verbrennungsmotors entsprechend einem vorbestimmten optimalen spezifischen Kraftstoffverbrauch einzustellen. Die Steuerung ist weiterhin dazu programmiert, das Laden der Traktionsbatterie mit einem Leistungspegel zu bewirken, der gleich einer Differenz zwischen der Leistungsabgabe des Verbrennungsmotors und einem Leistungsbedarf des Fahrzeugs ist. In wenigstens einer Ausführungsform beinhaltet das Verfahren zum Laden einer Traktionsbatterie das Betreiben eines Verbrennungsmotors, um ein Ausgangsdrehmoment und eine Ausgangsdrehzahl für den Fahrzeugantrieb zu erzeugen. Das Verfahren beinhaltet auch das Aufbringen eines Reaktionsdrehmoments gegen das Ausgangsdrehmoment durch eine Elektromaschine, um Leistung zum Laden einer Batterie zu erzeugen. Das Verfahren beinhaltet weiterhin das Erhöhen des Ausgangsdrehmoments und einer Ausgangsdrehzahl des Verbrennungsmotors, um einen vorbestimmten Batterieladeleistungspegel auf Basis eines spezifischen Kraftstoffverbrauchs des Verbrennungsmotors zu erzeugen. Es werden hier Ausführungsformen der vorliegenden Offenbarung beschrieben. Es versteht sich allerdings, dass die offenbarten Ausführungsformen lediglich Beispiele sind und dass andere Ausführungsformen verschiedene und alternative Formen annehmen können. Die Figuren sind nicht notwendigerweise maßstabsgetreu; einige Merkmale könnten übertrieben oder verkleinert dargestellt sein, um Details spezieller Komponenten zu zeigen. Daher sind hier offenbarte, spezifische strukturelle und funktionale Details nicht als einschränkend zu interpretieren, sondern lediglich als eine repräsentative Grundlage, um einen Fachmann über verschiedene Anwendungen der vorliegenden Erfindung zu unterrichten. Wie Durchschnittsfachleute verstehen werden, können verschiedene, mit Bezug auf jede der Figuren veranschaulichte und beschriebene Merkmale mit Merkmalen kombiniert werden, die in einer oder mehreren anderen Figuren veranschaulicht werden, um Ausführungsformen herzustellen, die nicht ausdrücklich veranschaulicht oder beschrieben werden. Die Kombinationen von veranschaulichten Merkmalen stellen repräsentative Ausführungsformen für typische Anwendungen bereit. Verschiedene Kombinationen und Modifikationen der Merkmale, die mit den Lehren dieser Offenbarung übereinstimmen, könnten allerdings für spezielle Anwendungen oder Umsetzungsformen erwünscht sein. Wenn ein Hybridfahrzeug betrieben wird, variiert der Ladezustand (SOC) der Traktionsbatterie, der zum Entladen von Leistung und zu Wiederladezyklen in Beziehung steht. Es ist häufig wünschenswert, die Ausnutzung der in der Batterie gespeicherten Energie durch Umwandeln der elektrischen Energie in Antriebsleistung für das Fahrzeug zu maximieren. Wenn das Fahrzeug im Ruhezustand ist, kann das Fahrzeug an ein Stromversorgungsnetz angeschlossen werden, um die Batterie aufzuladen. Die Rate, mit der ein Plug-in-Hybridelektrofahrzeug aus einer elektrischen Ladestation geladen wird, ist durch Faktoren der Station begrenzt, einschließlich der Bemessungsdaten der Steckdose der Ladestation. Zu Beispielen für Begrenzung zählen eine 110-V-Wechselstromsteckdose mit einer 20-A-Trennvorrichtung, die ein Maximum von etwa 1,4 Kilowatt an Ladeleistung bereitstellt, oder eine 240-V-Wechselstromsteckdose mit einer 50-A-Trennvorrichtung, die ein Maximum von 12 Kilowatt an Ladeleistung bereitstellt. Die maximale Laderate kann aufgrund von Verlusten beim Umwandeln von Wechselstrom in Gleichstrom zur Aufnahme in einer Batterie reduziert werden. Allerdings kann ein Motor mit innerer Verbrennung, der einen Generator antreibt, so viel wie 35 Kilowatt oder mehr abgeben. Das Laden der Batterie unter Verwendung des Verbrennungsmotors als der Leistungsquelle kann im Vergleich zum Laden mit einer Standard 110-V-/20-A-Wechselstromsteckdose wesentlich schnelleres Laden ermöglichen. Typischerweise wünscht ein Fahrzeugnutzer nach dem Anschließen, die Ausnutzung der elektrischen Energie vom Energieversorger zu maximieren. Während der Fahrzyklen kann es wünschenswert sein, einen Teil der Abgabe des Verbrennungsmotors strategisch zuzuteilen, wenn das Fahrzeug zum Erzeugen eines Stroms zum Wiederladen der Batterie arbeitet. Wie nachstehend ausführlicher erörtert wird, kann die gewünschte Zuteilung von Batterieladen aus dem Verbrennungsmotor auf der Prognose von bevorstehenden Fahrzeugbetriebsbedingungen und auf selektivem Laden der Batterie basieren, um während des Betriebs unter den bevorstehenden Bedingungen durchweg gewünschte Batterieladepegel zu erreichen. In Bezug auf den Benzinverbrauch des Verbrennungsmotors kann es weiterhin wünschenswert sein, eine bevorzugte Wiederladerate anzustreben, um den Wirkungsgrad des Verbrennungsmotors zu maximieren. Eine Traktionsbatterie oder Batteriesatz 124 speichert Energie, die von den Elektromaschinen 114 verwendet werden kann. Der Batteriesatz 124 stellt typischerweise eine Hochspannungs-Gleichstrom-Ausgabe bereit. Einer oder mehrere Schützkontakte 142 können die Traktionsbatterie 124 von einem Hochspannungs-Gleichstrom-Bus 154A trennen, wenn sie geöffnet sind, und die Traktionsbatterie 124 mit dem Hochspannungs-Gleichstrom-Bus 154A koppeln, wenn sie geschlossen sind. Die Traktionsbatterie 124 ist elektrisch mit einem oder mehreren leistungselektronischen Modulen 126 über den Hochspannung-Gleichstrom-Bus 154A gekoppelt. Das leistungselektronische Modul 126 ist auch mit den Elektromaschinen 114 elektrisch verbunden und stellt die Fähigkeit zur bidirektionalen Energieübertragung zwischen dem Hochspannungs-Wechselstrom-Bus 154B und den Elektromaschinen 114 bereit. Zum Beispiel kann eine Traktionsbatterie 124 einen Gleichstrom bereitstellen, während die Elektromaschinen 114 zum Funktionieren unter Verwendung eines dreiphasigen Wechselstroms arbeiten können. Das leistungselektronische Modul 126 kann den Gleichstrom in einen dreiphasigen Wechselstrom umwandeln, um die Elektromaschinen 114 zu betreiben. In einem regenerativen Modus kann das leistungselektronische Modul 126 die dreiphasige Wechselstromausgabe aus den Elektromaschinen 114, die als Generatoren fungieren, in den mit der Traktionsbatterie 124 kompatiblen Gleichstrom umwandeln. Die Beschreibung hier ist gleichermaßen auf ein reines Elektrofahrzeug anwendbar. Zusätzlich dazu, dass die Traktionsbatterie 124 Energie für den Vortrieb bereitstellt, kann sie Energie für andere elektrische Fahrzeugsysteme bereitstellen. Ein Fahrzeug 112 kann ein Gleichspannungswandlermodul 128 enthalten, das elektrisch mit dem Hochspannungsbus 154 gekoppelt ist. Das Gleichspannungswandlermodul 128 kann elektrisch mit einem Niederspannungsbus 156 gekoppelt sein. Das Gleichspannungswandlermodul 128 kann die Hochspannungs-Gleichstrom-Ausgabe der Traktionsbatterie 124 in eine Niederspannungs-Gleichstrom-Versorgung umwandeln, die kompatibel zu Fahrzeug-Niederspannungslasten 152 ist. Der Niederspannungsbus 156 kann elektrisch mit einer Hilfsbatterie 130 (z. B. einer 12-V-Batterie) gekoppelt sein. Die Niederspannungssysteme 152 können elektrisch mit dem Niederspannungsbus 156 gekoppelt sein. Das Niederspannungssystem 152 kann verschiedene Steuerungen im Fahrzeug 112 enthalten. Die Traktionsbatterie 124 des Fahrzeugs 112 kann durch eine externe Leistungsquelle 136 wiederaufgeladen werden. Die externe Leistungsquelle 136 kann eine Verbindung zu einer elektrischen Steckdose sein. Die externe Leistungsquelle 136 kann elektrisch mit einem Ladegerät oder einem Electric Vehicle Supply Equipment (EVSE) 138 gekoppelt sein. Die externe Leistungsquelle 136 kann ein elektrisches Leistungsverteilungsnetzwerk oder ein Stromnetz sein, wie es von einem Elektrizitätsversorgungsunternehmen bereitgestellt wird. Das EVSE 138 kann Schaltkreise und Steuerungen bereitstellen, um die Übertragung von Energie zwischen der Leistungsquelle 136 und dem Fahrzeug 112 zu regeln und zu managen. Die externe Leistungsquelle 136 kann dem EVSE 138 elektrische Gleichstrom- oder Wechselstromleistung bereitstellen. Das EVSE 138 kann einen Ladeverbinder 140 zum Einstecken in einen Ladeport 134 des Fahrzeugs 112 aufweisen. Der Ladeport 134 kann irgendeine Art von Port sein, der dazu konfiguriert ist, Leistung aus dem EVSE 138 zum Fahrzeug 112 zu übertragen. Der Ladeport 134 kann mit einem Ladegerät oder einem fahrzeugeigenen Leistungswandlungsmodul 132 elektrisch gekoppelt sein. Das Leistungswandlungsmodul 132 kann die aus dem EVSE 138 zugeführte Leistung konditionieren, um der Traktionsbatterie 124 die korrekten Spannungs- und Strompegel bereitzustellen. Das Leistungswandlungsmodul 132 kann an das EVSE 138 angekoppelt sein, um die Zufuhr von Leistung zum Fahrzeug 112 zu koordinieren. Der EVSE-Verbinder 140 kann Pins aufweisen, die mit entsprechenden Vertiefungen des Ladeports 134 ineinandergreifen. Alternativ können verschiedene Komponenten, die als elektrisch gekoppelt oder verbunden beschrieben werden, Leistung unter Verwendung einer drahtlosen induktiven Kopplung übertragen. Eine oder mehrere Radbremsen 144 können zum Verlangsamen des Fahrzeugs 112 und zum Verhindern von Bewegung des Fahrzeugs 112 bereitgestellt werden. Die Radbremsen 144 können hydraulisch, elektrisch oder mit einer Kombination daraus betätigt werden. Die Radbremsen 144 können ein Teil eines Bremssystems 150 sein. Das Bremssystem 150 kann andere Komponenten enthalten, um die Radbremsen 144 zu betreiben. Zur Vereinfachung zeigt die Figur eine einzelne Verbindung zwischen dem Bremssystem 150 und einer der Radbremsen 144. Eine Verbindung zwischen dem Bremssystem 150 und den anderen Radbremsen 144 wird impliziert. Das Bremssystem 150 kann eine Steuerung enthalten, um das Bremssystem 150 zu überwachen und zu koordinieren. Das Bremssystem 150 kann die Bremskomponenten überwachen und die Radbremsen 144 zur Fahrzeugverlangsamung steuern. Das Bremssystem 150 kann über ein Bremspedal auf Fahrerbefehle ansprechen, und es kann auch autonom arbeiten, um Merkmale, wie zum Beispiel Stabilitätskontrolle, umzusetzen. Die Steuerung des Bremssystems 150 kann ein Verfahren zum Aufbringen einer angeforderten Bremskraft umsetzen, wenn es von einer anderen Steuerung oder Unterfunktion angefordert wird. Eine oder mehrere elektrische Hochspannungslasten 146 können mit dem Hochspannungsbus 154 gekoppelt sein. Die elektrischen Hochspannungslasten 146 können eine zugehörige Steuerung aufweisen, die die elektrischen Hochspannungslasten 146 betreibt und steuert, wenn es angemessen ist. Zu den Hochspannungslasten 146 können Verdichter und elektrische Heizgeräte zählen. Zum Beispiel kann das Klimaanlagensystem bei hohen Kühllasten so viel wie 6 kW ziehen. Die verschiedenen erörterten Komponenten können eine oder mehrere zugehörige Steuerungen zum Steuern und Überwachen des Betriebs der Komponenten aufweisen. Die Steuerungen können über einen seriellen Bus (z. B. Controller Area Network (CAN)) oder über diskrete Leiter in Verbindung stehen. Zusätzlich kann eine Systemsteuerung 148 vorhanden sein, um den Betrieb der verschiedenen Komponenten zu koordinieren. Bei einer Zündung-Aus-Bedingung können die Schützkontakte 142 in einem geöffneten Zustand sein, so dass die Traktionsbatterie 124 dem Hochspannungsbus 154 keine Leistung bereitstellt. Bei der Zündung-Aus-Bedingung kann die Traktionsbatterie 124 von der Hilfsbatterie 130 abgekoppelt sein. Bei der Zündung-Aus-Bedingung können ausgewählte elektronische Module (z. B. die Niederspannungslasten 152) aktiv sein. Zum Beispiel können ein Diebstahlschutzsystem und ein Fernentriegelungssystem weiter aktiv sein. Die aktiven Systeme können Strom aus der Hilfsbatterie 130 ziehen. In einigen Konfigurationen können Niederspannungslasten 152, wie zum Beispiel Leuchten, versehentlich in einem aktiven Zustand gelassen werden und Strom aus der Hilfsbatterie 130 ziehen, was eine Entladerate der Hilfsbatterie 130 erhöhen kann. Die Niederspannungslasten 152 können dazu konfiguriert sein, während der Zündung-Aus-Bedingung die Stromaufnahme zu minimieren. Wenn das Fahrzeug 112 am EVSE 138 angeschlossen ist, können sich die Schützkontakte 142 in einem geschlossenen Zustand befinden, so dass die Traktionsbatterie 124 mit dem Hochspannungsbus 154 und der Leistungsquelle 136 gekoppelt ist, um die Batterie aufzuladen. Das Fahrzeug kann sich in Zündung-Aus-Bedingung befinden, wenn es am EVSE 138 angeschlossen ist. Obwohl die Systemsteuerung 148 als eine einzige Steuerung dargestellt wird, kann sie als eine oder mehrere Steuerungen umgesetzt sein. Die Steuerung 148 kann Betriebsbedingungen der Traktionsbatterie 124, des Leistungswandlungsmoduls 132 und der Elektromaschine 114 überwachen. Die Traktionsbatterie 124 enthält einen Stromsensor, um einen durch die Traktionsbatterie 124 fließenden Strom zu erfassen. Die Traktionsbatterie 124 enthält auch einen Spannungssensor, um eine Spannung über den Anschlüssen der Traktionsbatterie 124 zu erfassen. Der Spannungssensor kann ein Signal ausgeben, das die Spannung über den Anschlüssen der Traktionsbatterie 124 angibt. Der Traktionsbatterie-Stromsensor kann ein Signal einer Größe und Richtung des Stroms ausgeben, der in die Traktionsbatterie 124 hinein oder aus ihr heraus fließt. Das Leistungswandlungsmodul 132 enthält auch einen Stromsensor, um einen vom EVSE 138 zur Traktionsbatterie 124 fließenden Strom zu erfassen. Der mit der Elektromaschine 114 gekoppelte Verbrennungsmotor 118 erzeugt einen Wechselstrom, der vom leistungselektronischen Modul 126 in einen Gleichstrom umgewandelt wird. Der Verbrennungsmotor 118 kann von einem Antriebsstrangsteuermodul gesteuert werden, das wenigstens eine Steuerung in Verbindung mit der Systemsteuerung 148 aufweist. Der Stromsensor des Leistungswandlungsmoduls 132 kann ein Signal ausgeben, das eine Größe und Richtung des Stroms angibt, der aus dem EVSE 138 zur Traktionsbatterie 124 fließt. Die Stromsensor- und Spannungssensorausgaben der Traktionsbatterie 124 werden der Steuerung 148 bereitgestellt. Die Steuerung 148 kann dazu programmiert sein, einen Ladezustand (SOC) auf Basis der Signale vom Stromsensor und vom Spannungssensor der Traktionsbatterie 124 zu berechnen. Um den Ladezustand zu berechnen, können verschiedene Techniken genutzt werden. Zum Beispiel kann eine Amperestunden-Integration umgesetzt werden, bei der der Strom durch die Traktionsbatterie 124 über der Zeit integriert wird. Der Ladezustand kann auch auf Basis der Ausgabe des Traktionsbatterie-Spannungssensors 104 geschätzt werden. Die jeweils genutzte Technik kann von der chemischen Zusammensetzung und den Charakteristika der speziellen Batterie abhängen. Die Steuerung 148 kann dazu konfiguriert sein, den Zustand der Traktionsbatterie 124 zu überwachen. Die Steuerung 148 kann einen Prozessor enthalten, der wenigstens einen Teil des Betriebs der Steuerung 148 steuert. Der Prozessor ermöglicht die fahrzeugeigene Verarbeitung von Befehlen und Routinen. Der Prozessor kann mit nicht persistentem Speicher und mit persistentem Speicher gekoppelt sein. In einer veranschaulichenden Konfiguration ist der nicht persistente Speicher Direktzugriffspeicher (RAM, Random Access Memory), und der persistente Speicher ist Flash-Speicher. Im Allgemeinen kann persistenter (nichtflüchtiger) Speicher alle Arten von Speicher enthalten, die Daten halten, wenn ein Computer oder eine andere Einrichtung heruntergefahren wird. Für die Traktionsbatterie 124 kann ein Ladezustandsbetriebsbereich definiert werden. Die Betriebsbereiche können einen oberen und einen unteren Grenzwert definieren, auf die der Ladezustand für die Batterie 124 begrenzt wird. Die Steuerung 148 kann dazu konfiguriert sein, während des Fahrzeugbetriebs den Ladezustand der Batterie 124 innerhalb des zugehörigen Betriebsbereichs zu halten. In dieser Hinsicht kann die Batterie vom Verbrennungsmotor wiederaufgeladen werden, während das Fahrzeug in Betrieb ist. In wenigstens einer Ausführungsform wird vom Verbrennungsmotor ausgegebenes Drehmoment der Elektromaschine zugeteilt, um die Batterie als Reaktion darauf wiederaufzuladen, dass der SOC auf einen niedrigen SOC-Schwellenwert entladen worden ist. Auf Basis einer Batterieentladerate kann das Laden der Traktionsbatterie im Voraus auf Basis davon geplant werden, dass sich der niedrige SOC-Schwellenwert nähert. Zusätzlich ermöglicht das Einplanen von bekannten, bevorstehenden Fahrzeugbetriebsbedingungen der Steuerung, den Antriebsstrangbetrieb zu planen, um gespeicherte Energie für vorbestimmten Betrieb im EV-(Electric Vehicle, Elektrofahrzeug-)Modus für längere Zeiträume auf einer Tour zu erhalten oder zu erzeugen. Das Timing und die Rate des Ladens können auch opportunistisch ausgewählt werden, um zum Maximieren des Ladewirkungsgrads die bevorstehenden Fahrzeugbetriebsbedingungen am besten auszunutzen. Mit Bezug auf Ein Fahrzeugverbrennungsmotor kann eine optimale Leistungsabgabe entsprechend den aktuellen Fahrzeugbedingungen aufweisen. Eine Weise, den Wirkungsgrad der Verbrennungsmotorleistungsabgabe zu bewerten, ist durch Messen des spezifischen Kraftstoffverbrauchs (BSFC). Der BSFC ist ein Maß der Kraftstoffverbrauchsrate geteilt durch die vom Verbrennungsmotor produzierte Energie. Die Werte werden üblicherweise in g/kW·h ausgedrückt. Mit dem Wert wird die Verbrennungsmotorleistungsfähigkeit normalisiert, und er wird häufig verwendet, um den Wirkungsgrad unterschiedlicher Verbrennungsmotoren und unterschiedlicher Betriebsbedingungen zu vergleichen. Jeder Verbrennungsmotor hat andere BSFC-Werte. Während der Verbrennungsmotorentwicklung kann ein Kennfeld der Verbrennungsmotorleistungsfähigkeit für alle stationären Betriebsbedingungen bestimmt werden. Auf Basis der Verbrennungsmotordrehzahl und des Verbrennungsmotordrehmoments zum Erreichen einer gewünschten Leistungsabgabe und Fahrzeuggeschwindigkeit können die Arbeitspunkte über das BSFC-Kennfeld variieren. Die Leistung, die dem Laden der Batterie zugeteilt wird, kann ein Erhöhen der Verbrennungsmotorleistungsabgabe erfordern und den Arbeitspunkt im Vergleich zu stationären Nicht-Lade-Bedingungen verschieben. PBatt Charge Limit kann bestimmt werden, indem ein optimaler BSFC-Arbeitspunkt Pideal des Verbrennungsmotors während des Ladens bestimmt wird. In wenigstens einer Ausführungsform wird PBatt Charge Limit bestimmt, indem der Fahrzeugleistungsbedarf vom optimalen BSFC-Arbeitspunkt Pideal subtrahiert wird. Häufig ist der Fahrzeugleistungsbedarf die Summe der zum Antreiben des Fahrzeugs erforderlichen Leistung plus jedem Zubehörleistungsbedarf. Mit Bezug auf Die durch die Punkte A bis E dargestellte Kurve zeigt einen Bereich von Traktionsbatterie-Laderaten beim Fahren mit 55 mph. Der Punkt A stellt eine Bedingung dar, bei der dem Batterieladen 0 kW zugeteilt werden, und etwa 13 kW werden für den Fahrzeugantrieb gewidmet. In diesem Fall wird die gesamte produzierte Leistung dem Decken des Fahrzeugleistungsbedarfs gewidmet. Der Punkt A entspricht einem BSFC von etwa 310 g/kW·h. Um Leistung für die Batterie bereitzustellen, werden Verbrennungsmotordrehzahl und -drehmoment erhöht, um überschüssige Leistung zur Abgabe von Drehmoment an die Elektromaschine zum Laden bereitzustellen. Der Punkt B stellt eine Bedingung dar, bei der dem Batterieladen 6 kW zugeteilt werden, bei einer gesamten Verbrennungsmotorabgabe von etwa 19 kW. Die Betriebsbedingung, die dem Punkt B entspricht, führt ein BSFC von etwa 293 g/kW·h zu, was gegenüber dem Punkt A verbessert ist. Im Punkt C wird die dem Batterieladen zugeteilte Leistung auf 10 kW erhöht. Die Gesamtverbrennungsmotorabgabe wird ebenfalls auf etwa 23 kW erhöht, um die erforderlichen 13 kW für den Antrieb bereitzustellen. Der BSFC des Verbrennungsmotorbetriebs im Punkt C wird relativ zum Punkt B auf etwa 289 g/kW·h verbessert. Im Punkt D beträgt die dem Batterieladen zugeteilte Ladeleistung 12 kW, wobei die Gesamtverbrennungsmotorabgabe etwa 25 kW beträgt. Der Verbrennungsmotor-BSFC wird weiterhin geringfügig auf weniger als 289 g/kW·h verbessert, wie durch die Position des Punktes D innerhalb des „Sweetspot“ (optimaler Arbeitspunkt) zu sehen ist, der auf dem BSFC-Umrisskennfeld gezeigt wird. Im Punkt E wird das Batterieladen weiter auf 15 kW erhöht, und die Gesamtverbrennungsmotorabgabe ist etwa 28 kW. Allerdings ist zu erkennen, dass der BSFC auf mehr als 289 g/kW·h verschlechtert wird, wenn die Verbrennungsmotorabgabe weiter vom Arbeitspunkt D zum Arbeitspunkt E erhöht wird. Entsprechend dem Verbrennungsmotor-BSFC-Kennfeld in Obwohl opportunistisches Laden im Allgemeinen den Verbrennungsmotorbetrieb hin zum Betrieb beim besten, für die Bedingungen verfügbaren BSFC vorspannt, kann es wünschenswert sein, den Verbrennungsmotor nicht bei allen Bedingungen mit einem effizienten BSFC laufen zu lassen. Wie oben erörtert wird, ist es möglich, den Verbrennungsmotor mit einer höheren Last als erforderlich laufen zu lassen, um effizient aufzuladen, jedoch beeinträchtigt dies bei niedrigen Geschwindigkeiten die Nutzerfreundlichkeit durch Produktion von erhöhtem Geräusch, Vibration und Rauheit (NVH, Noise, Vibration and Harshness) des Verbrennungsmotors. Im Allgemeinen erwarten Kunden bei niedrigen Fahrzeuggeschwindigkeiten in erster Linie ruhigen oder geräuscharmen Antriebsstrangbetrieb. Mit Bezug auf Obwohl das Verwenden einer Differenz zwischen Pideal und dem Fahrzeugleistungsbedarf in gewissen Bereichen des Antriebsstrangbetriebs geeignet ist, kann es bei niedrigen Fahrzeuggeschwindigkeiten (die in Beziehung zu einem niedrigen Fahrzeugleistungsbedarf stehen) wünschenswert sein, die Verbrennungsmotorleistungsabgabe zu reduzieren, um den Antriebsstrang-NVH zu reduzieren und den Kundenkomfort zu erhöhen. Die Punktlinie 262 ist zum Beispiel eine hypothetisch verfügbare Batterieladeleistung, die auf dem Subtrahieren des Fahrzeugleistungsbedarfs von Pideal basiert. Weil der Fahrzeugleistungsbedarf hin zu null reduziert wird, zum Beispiel, wenn das Fahrzeug im Leerlauf ist, nähert sich die theoretische zum Laden verfügbare Verbrennungsmotorleistung in der Nähe des Punktes 264 einem Wert gleich Pideal. Allerdings ist es möglicherweise nicht erwünscht, den Verbrennungsmotor zum Laden der Batterie mit hoher Leistungsabgabe zu betreiben, während das Fahrzeug bei niedrigen Geschwindigkeiten angetrieben wird oder im Leerlauf ist. Im Gebiet 266 in Außer einem völligem Verhindern des Ladens kann der variable Batterieladegrenzwert PBatt Charge Limit bei mittleren Geschwindigkeiten reduziert werden, indem die Verbrennungsmotorleistungsabgabe auf einen Wert kleiner als Pideal dosiert wird, um NVH zu reduzieren. In dem Beispiel in Mit Rückbezug auf Falls der Fahrzeugleistungsbedarf im Schritt 208 größer als der Leistungsschwellenwert P1 ist, vergleicht die Steuerung den Fahrzeugleistungsbedarf im Schritt 210 mit dem optimalen Arbeitspunkt des Verbrennungsmotors Pideal. Falls der Fahrzeugleistungsbedarf größer oder gleich Pideal ist, gibt die Steuerung im Schritt 212 basierend auf dem großen Anteil Verbrennungsmotorleistung, der dem Erfüllen des Fahrzeugleistungsbedarfs gewidmet wird, einen Befehl zum Verhindern von Batterieladen unter Verwendung des Verbrennungsmotors aus. Falls im Schritt 210 der Fahrzeugleistungsbedarf kleiner oder gleich Pideal ist, kann die Steuerung im Schritt 214 einen Befehl ausgeben, um die Betriebsdrehzahl und das Betriebsdrehmoment des Verbrennungsmotors basierend auf dem Optimieren des verfügbaren BSFC des Verbrennungsmotors bei der vorliegenden Fahrzeuggeschwindigkeit so einzustellen, so dass sie der Leistungsabgabe Pideal entsprechen. In diesem Fall wäre die Leistungsabgabe des Verbrennungsmotors gleich der Summe von Fahrzeugleistungsbedarf und PBatt Charge Limit. Wie oben erörtert wird, variiert der PBatt Charge Limit als eine Funktion des Fahrzeugleistungsbedarfs und kann von unterschiedlichen Variablen über unterschiedliche Bereiche des Antriebsstrangbetriebs geregelt werden. Die Steuerung kann das Verfahren 200 auch auf eine schleifenförmige Art und Weise ausführen, um wiederholt die Fahrzeugbetriebsbedingungen abzufragen und Ladeleistungseinstellungen vorzunehmen, um den für die vorliegenden Betriebsbedingungen effizientesten Verbrennungsmotorbetrieb sicherzustellen. Mit Bezug auf Falls im Schritt 302 ein Batterieladezyklus geplant ist, kann die Steuerung im Schritt 306 in Betracht ziehen, ob ein Leistungsbedarf des Klimaregelungs-Heizsystems PClimate größer als ein vorbestimmter Leistungsschwellenwert P3 ist. Falls das Klimaregelungssystem deaktiviert ist oder falls PClimate kleiner als P3 ist, kann die Steuerung im Schritt 308 die Standardladeprozedurplanung nutzen. Falls der Leistungsbedarf PClimate des Klimaregelungs-Heizsystems im Schritt 306 ausreichend groß ist, kann die Steuerung im Schritt 310 in Betracht ziehen, ob die Batterie Kapazität zum Laden aufweist. Falls der Batterie-SOC im Schritt 310 größer oder gleich als ein Ladeschwellenwert SOCHigh ist, kann die Steuerung im Schritt 308 die Standardladeprozedurplanung nutzen. Falls der Batterie-SOC im Schritt 310 kleiner als der Ladeschwellenwert SOCHigh ist, gibt dies an, dass die Batterie Kapazität zum Aufnehmen von Ladeleistung aufweist. Die Steuerung kann dann Befehle ausgeben, um den Verbrennungsmotor zum Erzeugen von Wärme zu nutzen, die vom Klimaregelungssystem abgefordert wird. Wärme aus dem Verbrennungsmotorbetrieb wird im Allgemeinen als Abfallprodukt abgeführt, aber unter dieser Bedingung kann es vorteilhaft sein, den Verbrennungsmotor opportunistisch sowohl zum Batterieladen als auch zur Wärmeerzeugung zu nutzen. Im Schritt 312 kann die Steuerung einen Befehl ausgeben, um die konventionellen Wärmequellen, wie zum Beispiel ein Hochspannungsheizgerät, zu reduzieren oder zu deaktivieren. Im Schritt 314 kann die Steuerung einen Befehl ausgeben, den Verbrennungsmotor mit ausreichend Ausgabe laufen zu lassen, um sowohl Batterieladeleistung zuzuführen als auch Wärme zum Beheizen der Fahrgastzelle als Reaktion auf die Heizanforderung zu erzeugen. Ein Vorteil wird darin umgesetzt, dass erzeugte Wärme, die normalerweise verschwendet wird, verwendet wird, um eine vom Kunden gewünschte Funktion zu erfüllen. Zum Zweiten wird der Batterie-SOC während des Heizzyklus dadurch erhöht, dass der Verbrennungsmotor läuft, im Gegensatz zum Entladen der Batterie durch Betreiben eines elektrischen Hochspannungsheizgeräts, um einen Fahrgastzelle zu beheizen. Mit Bezug auf Falls im Schritt 402 ein Batterieladezyklus geplant ist, kann die Steuerung im Schritt 406 in Betracht ziehen, ob die aktuelle Batterietemperatur T2 höher als ein gewünschter vorbestimmter Temperaturschwellenwert T1 ist. Die Batterie kann während des Entladens und während der Ladezyklen Wärme erzeugen. In Bezug auf effizientes Laden ist es wünschenswert, die Batterie innerhalb eines gewissen Temperaturbereichs zu halten. Eine Batterie hat bei einer erhöhten Temperatur eine reduzierte Ladungsaufnahme, was zu einem niedrigeren Ladewirkungsgrad wegen elektrischer Verluste führt. Zusätzlich kann das Laden der Batterie bei hohen Temperaturen zu Kapazitätsverlusten beitragen, was den Gesamtlebenszyklus der Batterie verkürzt. Das Batteriesystem enthält ein Batteriewärmekonditionierungssystem, um die Batteriezellen zu kühlen oder zu beheizen, um die Batterietemperatur während des Betriebs in einem vorbestimmten Temperaturbereich zu halten. Der Kühlabschnitt des Wärmekonditionierungssystems kann eine Reihe von Lüftern enthalten, um Kühlung durch Konvektion durch Luftzirkulation zu unterstützen. Ähnlich kann der Kühlabschnitt des Wärmekonditionierungssystems ein Flüssigkühlmittel-Zirkulationssystem enthalten, um Wärme aus der Batterie abzuführen. Falls die aktuelle Batterietemperatur T2 im Schritt 406 kleiner als der Temperaturschwellenwert T1 ist, ergreift die Steuerung im Schritt 404 möglicherweise keine opportunistische Batterielademaßnahme und greift auf einen Default-Betriebsmodus zurück. Falls allerdings die aktuelle Batterietemperatur T2 im Schritt 406 über den Temperaturschwellenwert T1 erhöht ist, kann die Steuerung im Schritt 408 die Zeit Y bis zum nächsten bevorstehenden Batterieladen schätzen. Im Schritt 410 kann die Steuerung den Zeitraum X bestimmen, der erforderlich ist, um die Batterie von der aktuellen Batterietemperatur T2 auf den Temperaturschwellenwert T1 zu kühlen. In einem Beispiel stellt T1 einen oberen Grenzwert eines vorher bestimmten gewünschten Betriebstemperaturbereichs dar. Insbesondere kann T1 die Temperatur sein, bei deren Überschreiten ein Ladewirkungsgrad der Traktionsbatterie reduziert wird. In zusätzlichen Ausführungsformen ist T1 kleiner als der obere Grenzwert eines vorbestimmten gewünschten Betriebstemperaturbereichs, um einen Temperaturpuffer bereitzustellen und Ein-Aus-Schaltspiele des Batteriewärmekonditionierungssystems zu verhindern. Im Schritt 412 kann die Steuerung bestimmen, ob ausreichend Zeit vorhanden ist, um die Batterie vor der bevorstehenden Ladeprozedur thermisch zu konditionieren. Mit anderen Worten: Falls die zeitliche Dauer Y größer als die zeitliche Dauer X ist, gibt dies an, dass mehr als ausreichend Zeit vorhanden ist, um die Batterie vor dem bevorstehenden Laden zu konditionieren. Falls im Schritt 412 das bevorstehende Laden nicht innerhalb von X Minuten ab der jetzigen Zeit geplant ist, kann die Steuerung im Schritt 414 für eine Zeit warten, die gleich der Differenz zwischen der zeitlichen Dauer Y vor dem Laden und der zum Kühlen der Batterie erforderlichen zeitlichen Dauer X ist. Sobald die Zeit Y vor dem Laden gleich der zum Kühlen der Batterie erforderlichen Zeit X ist, kann die Steuerung im Schritt 416 einen Befehl ausgeben, um die Wärmekonditionierung der Batterie zu beginnen, damit die Batterietemperatur T1 vor dem Laden erreicht wird. In wenigstens einer Ausführungsform wird das Batteriewärmekonditionierungssystem zu einer vorbestimmten Zeit vor dem Start des geplanten Batterieladezyklus auf der Basis eines Zeitraums betrieben, der zum Kühlen der Traktionsbatterie erforderlich ist. Falls im Schritt 412 die Zeit Y vor dem Laden gleich der oder kleiner als die Zeit X zum Kühlen der Batterie ist, kann die Steuerung im Schritt 416 einen Befehl ausgeben, um die Wärmekonditionierung der Batterie sofort zu beginnen. Mit Bezug auf Falls das opportunistische Laden im Schritt 502 aktiviert ist, bestimmt die Steuerung, ob ein Leistungsbedarf PClimate der Fahrgastzellenklimasteuerung vom Klimasteuerungssystem größer als ein vorbestimmter Leistungsschwellenwert P4 ist. Falls PClimate im Schritt 506 kleiner als P4 ist, dann kann die Steuerung im Schritt 508 andere opportunistische Ladesteuerungsalgorithmen umsetzen, wie zum Beispiel andere, in der vorliegenden Offenbarung beschriebene Techniken. Falls PClimate im Schritt 506 größer als der Leistungsschwellenwert P4 ist, dann kann die Steuerung bestimmen, ob ein vom Nutzer gewählter „Hocheffizienz“-Modus umgesetzt wird. In wenigstens einer Ausführungsform zwingt ein vom Nutzer gewählter Hocheffizienz-Modus das Fahrzeugantriebsstrangverhalten dazu, aggressiver Kraftstoff einzusparen, sogar auf Kosten von gewissen Aspekten der Fahrzeugleistungsfähigkeit. Dies kann durch Zurückstufen der Leistungsaufnahmepriorität anderer Fahrzeugmerkmale zu Gunsten von effizientem Verbrennungsmotorbetrieb erreicht werden. Falls im Schritt 510 der vom Nutzer gewählte Hocheffizienz-Modus deaktiviert ist, priorisiert die Steuerung im Schritt 512 den Leistungsbedarf PClimate der Klimasteuerung gegenüber einer gewünschten Traktionsbatterieladerate. In wenigstens einer Ausführungsform gibt die Steuerung einen Befehl aus, um zu bewirken, dass die dem Fahrgastzellenklimasteuerungssystem bereitgestellte Leistung vollständig den Leistungsbedarf PClimate des Klimasteuerungssystems erfüllt. Zur gleichen Zeit bewirkt die Steuerung einen Batterieladeleistungspegel, der niedriger als ein optimaler Batterieladeleistungspegel ist. Zum Beispiel kann die Steuerung dazu programmiert sein, davon abzuweichen, dass eine Batterieladerate dazu gezwungen wird, dem optimalen spezifischen Kraftstoffverbrauch, wie er oben beschrieben wird, zu entsprechen. Falls im Schritt 510 der vom Nutzer gewählte Hocheffizienz-Modus aktiviert ist, priorisiert die Steuerung im Schritt 516 die Traktionsbatterieladerate gegenüber dem Leistungsbedarf PClimate der Klimasteuerung. In wenigstens einer Ausführungsform gibt die Steuerung einen Befehl aus, um einen Ziel-Batterieladeleistungspegel zu halten, indem sie bewirkt, dass die dem Fahrgastzellenklimasteuerungssystem bereitgestellte Leistung kleiner als der Leistungsbedarf PClimate ist. Im Schritt 518 kann die Steuerung PClimate reduzieren, wie es erforderlich ist, um eine gewünschte Batterieladerate in Übereinstimmung mit effizientem Verbrennungsmotorbetrieb zuzuführen. Zum Beispiel kann die Steuerung dazu programmiert sein, die Klimasteuerungsleistungsfähigkeit zu opfern, damit eine Batterieladerate gehalten wird, die dem optimalen spezifischen Kraftstoffverbrauch entspricht, wie er oben beschrieben wird. Obwohl das Verfahren 500 mit Bezug auf das Priorisieren des Batterieladens gegenüber dem Leistungsbedarf der Klimasteuerung beschrieben worden ist, kann eine ähnliche Priorisierung für andere Zubehörlasten erfolgen, wenn der vom Nutzer ausgewählte Hocheffizienz-Modus ausgewählt ist. In wenigstens einer Ausführungsform kann die Steuerung die für eine Zubehörlast verfügbare Leistung reduzieren, um eine vorbestimmte Zielrate für das Laden der Traktionsbatterie zu halten. Auf diese Weise wird der Zubehörleistungsbedarf nur teilweise erfüllt, um den Verbrennungsmotorbetrieb auf einer höheren Priorität zu halten. Mit Bezug auf Falls das opportunistische Laden im Schritt 602 aktiviert ist, bestimmt die Steuerung im Schritt 606, ob Informationen zur bevorstehenden Route verfügbar sind. Zu den Nutzerrouteninformationen können geografische Reichweitendaten, Geschwindigkeitsbeschränkungsdaten entlang der Route, Stopphäufigkeit ebenso wie historisierte Daten von Nutzern, die auf der gleichen Route oder auf Teilen davon fahren, zählen. Diese Schichtdaten einschließlich Nutzerrouteninformationen sind im Allgemeinen statische Daten und gelten als festgelegte Informationen. Falls im Schritt 606 keine Nutzerrouteninformationen verfügbar sind, kann die Steuerung im Schritt 608 andere opportunistische Ladesteuerungsalgorithmen umsetzen, wie zum Beispiel andere, in der vorliegenden Offenbarung beschriebene Techniken. Falls im Schritt 606 Nutzerrouteninformationen verfügbar sind, zieht die Steuerung in Betracht, ob dynamische Verkehrsinformationen entsprechend der Route verfügbar sind. Zu dynamischen Verkehrsdaten können aktuelle Fahrgeschwindigkeiten auf speziellen Teilen der Route, Unfallinformationen, Wetter, Baustellen, Abschlusszeiten von Großereignissen und andere Faktoren zählen, die die Fahrgeschwindigkeit dynamisch beeinflussen. In wenigstens einer Ausführungsform werden Informationen zum Fahrzeug von einem zentralen Server rundgesendet. Gleichermaßen überträgt das Fahrzeug seine aktuellen Fahrbedingungen an den Server, um Kommunikation mit anderen Fahrzeugen im Netzwerk zu ermöglichen. Falls im Schritt 610 keinen dynamischen Verkehrsdaten verfügbar sind, kann die Steuerung im Schritt 612 opportunistisches Batterieladen auf Basis von statischen Nutzerrouteninformationen ausführen. In wenigstens einer Ausführungsform zieht die Steuerung den aktuellen Batterie-SOC, den verfügbaren Bereich und die spezielle zu fahrende Route in Betracht. Auf diese Weise kann die Steuerung im Voraus die zum effizienten Laden der Batterie günstigsten Zeiten auf Basis von Geschwindigkeitsbeschränkungen und Stopphäufigkeit entlang der Route bestimmen. Während des Fahrens mit niedriger Geschwindigkeit kann es eine Erwartung des Kunden sein, dass der Hybridfahrzeugantriebsstrang ruhig im rein elektrischen EV-Modus arbeitet. Die Systeme und Verfahren der vorliegenden Offenbarung tragen zum Erfüllen dieser Erwartungen bei. Falls zum Beispiel ein geplantes Laden in einer bevorstehenden Niedriggeschwindigkeitszone entlang der Route ausgelöst werden würde, was bewirkt, dass der Verbrennungsmotor läuft und Geräuschpegel über den Kundenerwartungen erzeugt, kann die Steuerung das Laden der Traktionsbatterie so bewirken, dass ausreichend Energie zum Betrieb im EV-Modus gespeichert wird, bevor die Niedriggeschwindigkeitszone erreicht wird. Lange Strecken mit moderater bis hoher Geschwindigkeit sind zum Batterieladen dienlicher und können daher vor der formellen Notwendigkeit für ein Batteriewiederladen genutzt werden. Auf diese Weise kann die Steuerung den Antriebsstrang zum Sicherstellen von ausreichender Batterieladung betreiben, damit der vorhergesagte erweiterte Betrieb im EV-Modus entlang der Tour aufrechterhalten wird. Falls im Schritt 610 dynamische Verkehrsdaten verfügbar sind, kann die Steuerung in Betracht ziehen, wie die statischen Routeninformationen von der zusätzlichen Schicht dynamischer Daten beeinflusst werden. Im Schritt 614 bestimmt die Steuerung, ob irgendwelche Niedriggeschwindigkeitsbedingungen zur bekannten bevorstehenden Route hinzugefügt worden sind. Unter solchen Niedriggeschwindigkeitsbedingungen kann ein Fahrer wiederum erwarten, dass das Hybridfahrzeug im rein elektrischen EV-Modus arbeitet. Falls keine Niedriggeschwindigkeits- oder Start-Stopp-Bedingungen dynamisch zur bevorstehenden Route addiert worden sind, kann die Steuerung im Schritt 612 die Batterieladeplanung auf Basis der statischen Nutzerrouteninformationen priorisieren. Diese Priorisierung berücksichtigt, ob und in welchem Ausmaß Batterieladen während des Fahrens erforderlich sein wird, um die Tour abzuschließen. Falls im Schritt 614 Niedriggeschwindigkeits- oder Start-Stopp-Bedingungen dynamisch zur bevorstehenden Route addiert worden sind, kann die Steuerung im Schritt 616 eine Neu-Priorisierung der Ladeplanung auf Basis der dynamischen Verkehrsbedingungen durchführen. Die Steuerung bestimmt erneut die zum effizienten Laden der Batterie günstigsten Zeiten auf Basis der tatsächlichen Fahrgeschwindigkeiten und der Stopphäufigkeit entlang der Route, während sie jeden bevorstehenden Betrieb im EV-Modus berücksichtigt. Die dynamischen Verkehrsdaten können langsamere als die normalen Verkehrsgeschwindigkeiten oder Start-Stopp-Bedingungen angeben. Auf Basis der aktualisierten Routeninformationen kann die Steuerung aggressiveres Laden der Traktionsbatterie planen als bei einer nicht opportunistischen Ladeplanung, um Energie zu speichern, bevor die Niedriggeschwindigkeitszone erreicht wird. Auf diese Weise wird ausreichend Energie gespeichert, um während der gewünschten Dauer der Tour den Betrieb im EV-Modus zu ermöglichen. Die hier offenbarten Prozesse, Verfahren oder Algorithmen können zur Ausgabe an ein verarbeitendes Bauelement, an eine Steuerung oder an einen Computer geeignet sein bzw. von diesen umgesetzt werden, wobei diese irgendeine vorhandene programmierbare elektronische Steuerungseinheit oder eine dedizierte elektronische Steuerungseinheit enthalten können. Analog können die Prozesse, Verfahren oder Algorithmen als Daten und Anweisungen gespeichert sein, die durch eine Steuerung oder einen Computer in vielen Formen ausführbar sind, einschließlich, aber nicht darauf beschränkt, Informationen, die auf nicht beschreibbaren Speichermedien dauerhaft gespeichert werden, wie zum Beispiel auf ROM-Einrichtungen, und Informationen, die auf beschreibbaren Speichermedien veränderlich gespeichert werden, wie zum Beispiel auf Floppydisks, Magnetbändern, CDs, RAM-Einrichtungen und anderen magnetischen und optischen Medien. Die Prozesse, Verfahren oder Algorithmen können auch in einem durch Software ausführbaren Objekt umgesetzt werden. Alternativ können die Prozesse, Verfahren oder Algorithmen im Ganzen oder in Teilen unter Verwendung von geeigneten Hardware-Komponenten umgesetzt werden, wie zum Beispiel von anwendungsspezifischen integrierten Schaltungen (Application Specific Integrated Circuits, ASICs), Field-Programmable Gate Arrays (FPGAs), Zustandsautomaten, Steuerungen oder anderen Hardware-Komponenten oder -Einrichtungen oder einer Kombination aus Hardware-, Software- und Firmware-Komponenten. Obwohl oben Ausführungsbeispiele beschrieben werden, ist nicht beabsichtigt, dass diese Ausführungsformen alle möglichen, durch die Ansprüche erfassten Formen beschreiben. Die in der Beschreibung verwendeten Begriffe sind eher beschreibende als einschränkende Begriffe, und es versteht sich, dass verschiedene Änderungen vorgenommen werden können, ohne vom Gedanken und vom Schutzbereich der Offenbarung abzuweichen. Die Merkmale verschiedener Ausführungsformen können, wie vorher beschrieben wurde, kombiniert werden, so dass sie weitere Ausführungsformen der Erfindung bilden, die möglicherweise nicht explizit beschrieben oder veranschaulicht werden. Obwohl verschiedene Ausführungsformen so beschrieben worden sein könnten, dass sie Vorteile gegenüber anderen Ausführungsformen oder Umsetzungsformen nach dem Stand der Technik hinsichtlich einer oder mehrerer erwünschter Kenngrößen bereitstellen bzw. diesen vorzuziehen sind, verstehen Durchschnittsfachleute, dass Kompromisse hinsichtlich eines oder mehrerer Merkmale oder Kenngrößen eingegangen werden können, um verlangte Eigenschaften des Gesamtsystems zu erreichen, die von der spezifischen Anwendung und Umsetzungsform abhängig sind. Zu diesen Merkmalen können Kosten, Festigkeit, Langlebigkeit, Lebensdauerkosten, Absatzfähigkeit, Erscheinungsbild, Montage, Größe, Wartungsfreundlichkeit, Gewicht, Herstellbarkeit, Montagefreundlichkeit usw. zählen, sind aber nicht darauf beschränkt. Von daher liegen Ausführungsformen, die hinsichtlich eines oder mehrerer Charakteristika als weniger wünschenswert als andere Ausführungsformen bzw. als Umsetzungsformen nach dem Stand der Technik beschrieben worden sind, nicht außerhalb des Schutzbereichs der Offenbarung und können für spezielle Anwendungen erwünscht sein. Es ist ferner beschrieben: Ein Fahrzeug enthält einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben, und eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen das Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen. Das Fahrzeug enthält auch eine Steuerung, die dazu programmiert ist, einen Befehl auszugeben, um das Verbrennungsmotorausgangsdrehmoment und eine Ausgangsdrehzahl entsprechend einem vorbestimmten optimalen spezifischen Kraftstoffverbrauch einzustellen, während sie Leistung zum Laden der Traktionsbatterie bereitstellt, einen Zubehörleistungsbedarf erfüllt und das Fahrzeug antreibt. Fahrzeug, das Folgendes umfasst: Fahrzeug nach Anspruch 1, wobei die Steuerung dazu programmiert ist, einen Befehl auszugeben, um das Laden der Traktionsbatterie als Reaktion darauf zu beenden, dass eine Summe der zum Antreiben des Fahrzeugs erforderlichen Leistung und des Zubehörleistungsbedarfs größer als ein dem spezifischen Kraftstoffverbrauch entsprechender Leistungspegel ist. Fahrzeug nach Anspruch 1, wobei die Steuerung dazu programmiert ist, einen Befehl auszugeben, um das Laden der Traktionsbatterie als Reaktion darauf zu beenden, dass eine Summe der zum Antreiben des Fahrzeugs erforderlichen Leistung und des Zubehörleistungsbedarfs kleiner als ein erster Leistungsschwellenwert ist. Fahrzeug nach Anspruch 1, wobei die Steuerung dazu programmiert ist, einen Befehl auszugeben, um das Verbrennungsmotorausgangsdrehmoment und die Ausgangsdrehzahl entsprechend einem maximalen NVH-Schwellenwert einzustellen, während die Summe der zum Antreiben des Fahrzeugs erforderlichen Leistung und des Zubehörleistungsbedarfs kleiner als ein zweiter Leistungsschwellenwert ist. Fahrzeug nach Anspruch 1, wobei die Steuerung weiterhin dazu programmiert ist, als Reaktion auf Nutzerrouteninformationen, die eine bevorstehende Niedriggeschwindigkeitszone entlang einer Route angeben, das Laden der Traktionsbatterie vor dem Erreichen der Niedriggeschwindigkeitszone zum Speichern von Energie zu bewirken, die ausreicht, um während des Aufenthalts in der Niedriggeschwindigkeitszone den rein elektrischen Betrieb aufrechtzuerhalten. Fahrzeug nach Anspruch 5, wobei die Steuerung dynamische Verkehrsdaten aus einer externen Quelle empfängt und die bevorstehende Niedriggeschwindigkeitszone auf Basis der dynamischen Verkehrsdaten modifiziert. Fahrzeug nach Anspruch 1, wobei die Steuerung einen Wert für einen vorbestimmten Batterieladeleistungspegel entsprechend jedem der mehreren Verbrennungsmotorausgangsdrehmomente und -ausgangsdrehzahlen auf Basis des spezifischen Kraftstoffverbrauchs des Verbrennungsmotors speichert. ERFINDUNGSGEBIET
ALLGEMEINER STAND DER TECHNIK
KURZE DARSTELLUNG DER ERFINDUNG
KURZE BESCHREIBUNG DER ZEICHNUNGEN
AUSFÜHRLICHE BESCHREIBUNG
einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben;
eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen; und
eine Steuerung, die dazu programmiert ist, einen Befehl auszugeben, um das Verbrennungsmotorausgangsdrehmoment und eine Ausgangsdrehzahl entsprechend einem vorbestimmten spezifischen Kraftstoffverbrauch einzustellen, während sie Leistung zum Laden der Traktionsbatterie bereitstellt, einen Zubehörleistungsbedarf erfüllt und das Fahrzeug antreibt.
einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben;
eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen; und
eine Steuerung, die dazu programmiert ist, eine Verbrennungsmotorleistungsabgabe entsprechend einem vorbestimmten spezifischen Kraftstoffverbrauch einzustellen und Laden der Traktionsbatterie mit einem Leistungspegel zu bewirken, der gleich einer Differenz zwischen der Verbrennungsmotorausgangsleistung und einem Fahrzeugleistungsbedarf ist.
einen Verbrennungsmotor zu betreiben, um ein Ausgangsdrehmoment und eine Ausgangsdrehzahl für den Fahrzeugantrieb zu erzeugen;
ein Reaktionsdrehmoment gegen das Ausgangsdrehmoment durch eine Elektromaschine aufzubringen, um Leistung zum Laden einer Batterie zu erzeugen; und
das Ausgangsdrehmoment und eine Ausgangsdrehzahl des Verbrennungsmotors zu erhöhen, um einen vorbestimmten Batterieladeleistungspegel zum Reduzieren eines spezifischen Kraftstoffverbrauchs des Verbrennungsmotors zu erzeugen.
einen Verbrennungsmotor, der dazu ausgelegt ist, Drehmoment abzugeben;
eine Elektromaschine, die dazu ausgelegt ist, ein Reaktionsdrehmoment gegen Verbrennungsmotorausgangsdrehmoment aufzubringen, um Leistung zum Laden einer Traktionsbatterie zu erzeugen; und
eine Steuerung, die dazu programmiert ist, einen Befehl auszugeben, um das Verbrennungsmotorausgangsdrehmoment und eine Ausgangsdrehzahl entsprechend einem vorbestimmten spezifischen Kraftstoffverbrauch einzustellen, während sie Leistung zum Laden der Traktionsbatterie bereitstellt, einen Zubehörleistungsbedarf erfüllt und das Fahrzeug antreibt.