MEMS ACTUATOR ELEMENT AND MEMS ACTUATOR ARRAY WITH A MULTIPLICITY OF MEMS ACTUATOR ELEMENTS
Die vorliegende Erfindung bezieht sich auf ein MEMS-Aktuator-Element (MEMS = mikroelektromechanisches System) und dessen Aufbau und ferner auf ein MEMS-Aktuator-Array mit einer Mehrzahl von MEMS-Aktuator-Elementen. Ausführungsbeispiele beziehen sich ferner auf ein MEMS-Aktuator-Element mit Kammantrieb und verbesserter Linearität. MEMS-Aktuator-Elemente (im Folgenden einfach auch Aktuatoren) gemäß Ausführungsbeispielen können für eine breite Palette von Anwendungen eingesetzt werden, wie z.B. Scannerspiegel, optische Schalter für die Kopplung von Lichtleitfasern (optical crossconnect), Mikroventile, elektrische Mikroschalter und andere. Eine besonders relevante Anwendung sind Flächenlichtmodulatoren, bei denen die Aktuatoren, meist als 2-dimensionales Array, damit verbundene Mikrospiegel bewegen und wie gewünscht positionieren. Im Folgenden wird auf den technischen Hintergrund eingegangen, wobei entsprechende Erkenntnisse und Schlussfolgerungen der Erfinder bzgl. des technischen Hintergrunds z.B. unter Bezugnahme auf die zitierten Referenzen zusammengefasst dargestellt werden. Meistens wird die Position eines beweglichen Aktuatorteils durch ein angelegtes elektrisches Signal gesteuert. Als physikalischer Effekt wird in vielen Fällen die elektrostatische Anziehungskraft genutzt, aber auch elektromagnetische Kräfte sowie piezoelektrische oder thermische Ausdehnung können eingesetzt werden. Aufgrund der Art der ausführbaren Bewegung unterscheidet man zwischen drehenden bzw. kippenden Aktuatoren und translatorischen Aktuatoren, sowie Aktuator-Typen, die beide Bewegungsarten ermöglichen. Im letzten Fall können die Bewegungskomponenten entweder durch die Art der Aufhängung fest gekoppelt sein, oder durch mehrere Ansteuersignale individuell eingestellt werden (z.B. piston-tip-tilt). Diese Erfindung kann für alle diese Bewegungsarten genutzt werden. In der nachfolgenden Beschreibung der Ausführungsbeispiele wird beispielsweise auf translatorischen Aktuatoren eingegangen, speziell solche, die mit Mikrospiegeln zur Phaseneinstellung von daran reflektiertem Licht gekoppelt sind. Die Beschreibung ist aber gleichermaßen auf Dreh- bzw. Kipp-Aktuatoren anwendbar. Oft sind solche Aktuatoren in großer Anzahl dicht gepackt auf einem Trägersubstrat in einer Ebene angeordnet und die gewünschte Auslenkungsrichtung ist senkrecht zu dieser Ebene. Dies bezeichnet man auch als Mikrospiegelarray. Die Form und Größe der Mikrospiegel und die nötige Auslenkung sind meist von der Anwendung und optischen Randbedingungen bestimmt. Kleine Spiegel erlauben dabei große Beugungswinkel und sind daher oft bevorzugt. Ihre Größe limitiert aber auch den verfügbaren Platz für die darunter liegende Speicherzelle der elektronischen Ansteuerung sowie für die konstruktive Auslegung des Aktuators und damit die mögliche Antriebskraft. Die dichte Packung begünstigt ebenfalls ein Übersprechen, so dass ein Aktuator in ungünstiger Weise auch auf das Ansteuersignal der benachbarten Aktuatoren reagieren kann. Bei den bisher bekannten elektrostatisch angesteuerten analogen Mikrospiegelarrays mit hoher bis sehr hoher Pixelanzahl (z.B. etwa >>1000 bis zu einigen Millionen) werden üblicherweise Plattenaktuatoren verwendet [2, 3). Diese sind relativ einfach im Design und in der Fertigung und können ausreichende Lösungen darstellen, solange die einzelnen Pixel noch deutlich größer sind, als etwa das 20-fache der gewünschten Auslenkung. Bei Plattenaktuatoren ist das Feld in brauchbarer Näherung homogen und der bewegliche Teil lässt sich weitgehend in Feldrichtung auslenken. Plattenaktuatoren zeigen jedoch den bekannten pull-in-Effekt, der bei parallelen Platten alle Positionen ab einer Auslenkung von einem Drittel des Anfangsabstandes der Platten bei 0V angelegter Spannung instabil und damit nicht nutzbar macht. Tatsächlich ist die Auslenkungskennlinie in der Näher des pull-in-Zustands bereits so steil, dass in der Praxis nur ein deutlich kleinerer Bereich des Anfangsabstandes genutzt werden kann, etwa nur 20%, evtl. 25%. Benötigt man z.B. zur Phasenmodulation von sichtbarem Licht eine Auslenkung von mindestens 320 nm (2π Modulationsbereich), so ergibt sich ein Anfangsabstand von mindestens 1,3 µm, eher 1,6 µm. Dieser große Abstand ergibt recht kleine elektrostatische Kräfte (da die Kraft proportional zum Kehrwert des Quadrats des Abstands sinkt) und für Pixelgrößen deutlich unter 10µm ein kaum noch beherrschbares Übersprechen der Nachbarpixel. Bei Mikrospiegelarrays mit sehr vielen Pixeln ist es oft vorteilhaft, die wirkende Adressspannung in zwei Beiträge zu trennen: eine feste, für alle (oder sehr viele) Pixel gleiche Spannung, die Biasspannung genannt wird und zu einer von der spannungsfreien Ruhelage verschiedenen Ausgangslage der Aktuatoren führt, sowie eine jedem individuellen Pixel eigene, je nach gewünschter Position unterschiedliche Adressspannung, die zwischen 0V und einem Maximalwert eingestellt werden kann. Die Bereitstellung der Biasspannung kann bei begrenztem Adressspannungsbereich eine größere Aktuatorkraft bei maximaler Auslenkung erzeugen, so dass härtere Federn zu Einsatz kommen können. Zudem wird die Linearität der Kennlinie verbessert. Andererseits verkleinert sich der nutzbare Auslenkungsbereich eines gegebenen Aktuators zwischen der durch die Biasspannung gegebenen Ausgangslage und der durch den Sicherheitsabstand vom pull-in-Punkt gegebenen Endlage des Aktuators. Dies muss im Allgemeinen durch einen weiter vergrößerten Abstand der Elektroden erkauft werden, was ein nochmals größeres Übersprechen zur Folge hat. Zudem wird der Vorteil der höheren Kraftentfaltung durch den größeren Elektrodenabstand teilweise wieder aufgezehrt. Elektrostatische Kammantriebe werden dagegen bisher meist in Mikrosystemen mit einzelnen oder wenigen, größeren Mikrospiegeln (oder anderen bewegten Bauteilen wie z.B. der Masse bei Inertialsensoren) eingesetzt, z.B. [4, 7]. Die dabei üblichen Bulk-mikromechanischen Fertigungsmethoden haben meist Strukturgrößen (z.B. Fingerbreiten) von mehreren Mikrometern und eignen sich nicht gut für Pixel, die insgesamt nur einige wenige Mikrometer groß sein sollen. Kammantriebe können für eine Aktuatorauslenkung parallel zu den Elektrodenebenen bzw. Fingern ausgelegt sein oder alternativ im Wesentlichen senkrecht dazu. Letzteres wird gerne als vertikaler Kammantrieb bezeichnet, da die Elektrodenebenen meist als Fertigungsebenen parallel zu einer Oberfläche eines Substrats liegen. In diesem Fall ist die Bewegung des Aktuators nach beiden Seiten nicht eingeschränkt und es können im resonanten Betrieb sehr große Auslenkungen erreicht werden. Ein derartiger vertikaler Kammantrieb ist auch aus Selbstverständlich können gemäß Ausführungsbeispielen die Aktuatoren je nach Fertigungstechnik auch anders orientiert sein, die Argumentation gilt dann entsprechend, wobei gemäß Ausführungsbeispielen der vorliegenden Erfindung derartige vertikale Kammantriebe für die skizzierten Randbedingungen optimiert werden. Die bekannten Mikrosysteme mit vertikalem Kammantrieb kann man einteilen in solche, bei denen die Elektroden (Kämme) nach Fertigstellung und ohne angelegte Spannung in einer gemeinsamen Ebene liegen und andere, bei denen die statischen und beweglichen Elektroden jeweils in einer eigenen Ebene liegen. Letzteres kann erreicht werden, indem die Elektroden direkt in verschiedenen Ebenen hergestellt werden z.B., indem der eine Teil der Elektroden durch einen späten Schritt im Fertigungsablauf aus ihrer ursprünglichen Position in eine neue Ruhelage gebracht werden, z.B., oder indem die beiden Elektroden an unterschiedlichen Seiten durch eine gesonderte Ätzung jeweils gekürzt werden z.B.. In allen diesen Fällen entsteht ein Aktuator, der sich beim Anlegen einer statischen Adressspannung analog auslenken lässt. Dagegen kann ein Aktuator mit beiden Elektroden in einer Ebene nur resonant angeregt werden und wäre für die vorliegende Aufgabe nicht geeignet. Im Fall der Elektroden in zwei Ebenen sind im Stand der Technik solche bekannt, die sich in Ruhelage (ohne angelegte Spannung) bereits überlappen bzw. in einander eingetaucht sind, d.h. die untere Kante des oberen Elektrodenkammes liegt tiefer als die obere Kante des unteren Kammes, wobei die Finger jeweils in den Lücken des anderen Kammes liegen. Dies wird so gewählt, da ein Kammantrieb bei gegebenem Design und gegebener Adressspannung seine volle Kraft erst entfaltet, wenn die Kämme in einander eingetaucht sind. Bei ausreichend tiefem Eintauchen ist auch die Berechnung der Kraft i. A. recht einfach und das System daher i. A. leicht zu verstehen und zu dimensionieren. Kammantriebe haben den Vorteil, dass sie in der gewünschten Arbeitsrichtung keinen pull-in-Zustand aufweisen und die Auslenkung daher sogar größer sein kann, als der Ruheabstand der Elektroden. Auch hier ist die gewünschte vertikale Kraft umso größer, je kleiner der horizontale Abstand der Elektrodenkanten ist. Eine untere Schranke für den horizontalen Elektrodenabstand ergibt sich jedoch durch die sehr viel größeren horizontalen Kräfte, die die einzelnen Finger aufeinander ausüben. Bei perfekt gefertigten Systemen addieren sich zwar alle horizontale Kräfte zu Null, aber bereits kleinste Ungenauigkeiten können zu enormen horizontalen Nettokräften führen, die einen solchen Aktuator sogar zerstören können (horizontaler pull-in). Dieser Effekt ist umso kritischer, je größer der Elektrodenüberlapp ist. Letzterer ist natürlich bei Vollauslenkung des Aktuators nochmals größer als in Ruhelage. Es gibt ebenfalls bekannte Systeme, bei denen die Elektroden in Ruhelage 'Kante auf Kante' liegen oder solche, bei denen ein geringer vertikaler Abstand vorliegt. Letzterer ist meist fertigungsbedingt als Folge einer Ätzstoppschicht oder Verbindungsschicht zwischen den Ebenen aus denen die Elektroden gefertigt wurden. Ein solcher Abstand wird als geringfügiger Nachteil zur Vereinfachung der Fertigung in Kauf genommen, das Potenzial zur Optimierung des Aktuators wurde bisher aber nicht erkannt. In allen elektrostatischen Aktuatoren ist die Aktuatorkraft bei gegebener Konfiguration und Auslenkung proportional zum Quadrat der Spannung. Zusätzlich steigt die Kraft mit Annäherung der Aktuatorteile aneinander weiter, was meistens eine unerwünscht stark nichtlineare Auslenkungskennlinie ergibt. Eine Möglichkeit der Linearisierung der Kennlinie ist in beschrieben. Leider lässt sie sich bei sehr kleinen Pixeln ggf. nur schwer anwenden. Die hier vorliegende Aufgabe besteht also darin, eine große Auslenkung und große Aktuatorkraft bei sehr kleinen, dicht gepackten Aktuatoren zu erreichen, wobei die Auslenkungskennlinie (d.h. die Aktuatorposition vs. Adressspannung) möglichst nah an der Linearität sein soll und ein Übersprechen zwischen Nachbarpixeln möglichst klein sein soll. Diese Aufgabe wird durch den unabhängigen Patentanspruch gelöst. Erfindungsgemäße Weiterbildungen sind in den Unteransprüchen definiert. Gemäß der Erfindung weist ein MEMS-Aktuator-Element folgende Merkmale auf: ein Substrat, eine erste Elektrodenstruktur mit einer Kantenstruktur, die bezüglich des Substrats feststehend angeordnet ist, eine zweite Elektrodenstruktur mit einer Kantenstruktur, wobei die zweite Elektrodenstruktur mittels einer Federstruktur auslenkbar mit dem Substrat gekoppelt ist und mittels einer Ansteuerspannung zwischen der ersten und zweiten Elektrodenstruktur elektrostatisch auslenkbar ist, um die Kantenstruktur der zweiten Elektrodenstruktur in eine Zwischenposition zwischen einer minimalen Auslenkungsposition und einer vertikal beabstandeten maximalen Auslenkungsposition zu bewegen, wobei die minimale und maximale Auslenkungsposition einen maximalen Auslenkungsweg (= Stroke) vorgeben, wobei die Kantenstrukturen der ersten und zweiten Elektrodenstruktur hinsichtlich einer Draufsicht gegenüberstehend ausgebildet und in der minimalen Auslenkposition vertikal voneinander beabstandet sind, und wobei die erste und zweite Elektrodenstruktur in einer Ebene parallel zu dem Substrat um einen lateralen Mindestabstand beabstandet sind, wobei der laterale Mindestabstand das 0,5-bis 1 ,5-fache des maximalen Auslenkungswegs beträgt, und wobei die vertikale Dicke der ersten und/oder zweiten Elektrodenstruktur das 0,6- bis 1 ,2-fache des maximalen Auslenkungswegs beträgt, und wobei in der maximalen Auslenkposition der vertikale Eintauchweg z1 der Kantenstruktur der zweiten Elektrodenstruktur in die Kantenstruktur der ersten Elektrodenstruktur bis zu dem 0,5-fachen des maximalen Auslenkungswegs z0, mit z1 ≤ 0,5 z0, beträgt, und eine Ansteuereinrichtung, ausgebildet zum Bereitstellen der Ansteuerspannung begrenzt durch eine minimale Ansteuerspannung und eine maximale Ansteuerspannung zwischen der ersten und zweiten Elektrodenstruktur, um basierend auf der elektrischen Ansteuerspannung die zweite Elektrodenstruktur in die Zwischenposition zwischen der minimalen Auslenkungsposition und der maximalen Auslenkungsposition elektrostatisch auszulenken, wobei eine minimale Ansteuerspannung eine Auslenkung der Kantenstruktur der zweiten Elektrodenstruktur in die minimale Auslenkungsposition und eine maximale Ansteuerspannung eine Auslenkung in die maximale Auslenkungsposition bewirkt. Die vertikale Richtung ist hierbei senkrecht zur Substratebene. Die vorliegende Erfindung umfasst auch ein MEMS-Aktuator-Array mit einer Mehrzahl von den erfindungsgemäßen MEMS-Aktuator-Elementen wobei die Ansteuereinrichtung ausgebildet ist, um eine eigene Ansteuerspannung zwischen der ersten und zweiten Elektrodenstruktur der jeweiligen MEMS-Aktuator-Elemente bereitzustellen. Ausführungsbeispiele sind insbesondere auf mikromechanische Aktuatoren anwendbar, die elektrostatisch angesteuert werden und über eine rückstellende elastische Aufhängung verfügen, die für eine statische Gleichgewichts-Auslenkung eine entsprechende Gegenkraft aufbringt. Die Auslenkung kann damit in einem vorgegebenen Bereich nach Wunsch kontinuierlich eingestellt werden und muss nicht durch mechanische Anschläge beschränkt sein. Ausführungsbeispiele beziehen sich daher z.B. auf solche Aktuatoren, die oft als Kammantrieb (comb drive) bezeichnet werden, bei denen inhomogene Randfelder die entscheidende Rolle spielen und sich der bewegliche Teil weitgehend quer zur Richtung des stärksten Teils des elektrischen Feldes auslenken lässt. Das elektrostatische Feld ist bei Kammantrieben durch den kleinen Elektrodenabstand räumlich eng um die Elektrodenfinger begrenzt. Dies sorgt für Aktuatorkräfte, die im Vergleich zu einem Plattenaktuator in der gleichen Pixelfläche wesentlich größer ausfallen können, auch wenn bei fertigungsbedingter gegebener Minimalgröße der Strukturen nur einige wenige Finger möglich sind. Allein dies ist bereits ein entscheidender Vorteil, da damit stärkere Federn und ein schnelleres Ansprechen des Aktuators möglich sind. Oberflächen-Mikromechanik erlaubt dabei wesentlich feinere Strukturen im Vergleich zur Bulk-Mikromechanik und ist daher bevorzugt. Dazu erlaubt der Kamm- bzw. Kantenantrieb ein geringes Übersprechen. Dafür kann es besonders günstig sein, eine der Elektrodenstrukturen mit dem gemeinsamen Potenzial aller Pixel an den Rand des Pixels zu legen. Wenn dies die feste Elektrode ist, kann diese direkt mit der Elektrode des Nachbarpixels verbunden werden, was entsprechend wenig Platz verbraucht. Zur Linearisierung der Kennlinie bei erträglichem Verlust an maximaler Aktuatorkraft ergeben sich besonders gute Gesamtergebnisse, wenn die Designparameter wie folgt optimiert werden (je nach Gewichtung der verschiedenen Zielparameter): in der Endlage (= maximale Auslenkposition), der gewünschten Vollauslenkung bei maximaler Adressspannung (= Betriebsspannung), entsteht ein nur geringer Überlapp (= Eintauchtiefe) der statischen und beweglichen Elektrodenebenen von nur näherungsweise 0% bis 50% des Strokes (= Auslenkungsbereich zwischen minimaler und maximaler Adressspannung), oder von 10% bis 40%, oder von 20% bis 30%. Ein großer Teil des Auslenkungsbereichs findet daher mit nicht überlappenden Elektroden statt. Der horizontale Elektrodenabstand wird mit 50% bis 150% des Strokes gewählt, oder 60% bis 100%, und die Dicke der Elektroden (= Ausdehnung in Auslenkungsrichtung) wird mit 60% bis 120% des Strokes, oder von 80% bis 100% gewählt. Die Biasspannung kann vorteilhaft im Bereich von 50% bis 200%, oder von 80% bis 150%, des für die Pixel individuellen Adressspannungsbereichs liegen. Der horizontale Elektrodenabstand ist beispielsweise der mittlere oder durchschnittliche (d.h. wirksame oder effektive) horizontale (d.h. laterale) Elektrodenabstand der ersten und zweiten Elektrodenstruktur in einer Ebene parallel zu einem Hauptoberflächenbereich des Substrats. Entsprechend ist die vertikale Dicke der ersten und zweiten Elektrodenstruktur beispielsweise die mittlere oder durchschnittliche (d.h. wirksame oder effektive) Dicke der ersten und zweiten Elektrodenstruktur. Basierend auf den obigen Designparametern für das MEMS-Aktuator-Element kann nun die für die jeweilige Anwendung gewünschte bzw. geforderte maximale Auslenkung zs (Stroke) des MEMS-Aktuatorelements mit kleinen Abmessungen (Pitch), einer relativ niedrigen Antriebsspannung und einer (möglichst) linearen Kennlinie des MEMS-Aktuatorelements erhalten werden. Der resultierende maximale Auslenkungsweg des MEMS-Aktuator-Elements kann somit an die durch die Anwendung geforderte Größe unter Beibehaltung der Randparameter (kleine Abmessungen, kleine Antriebsspannung und lineare Kennlinie) erhalten werden, wobei typische Anwendungen für das MEMS-Aktuator-Element beispielweise Scannerspiegel, optische Schalter für die Kopplung von Lichtleitfasern, Mikroventile, elektrische Mikroschalter oder Flächenlichtmodulatoren sein können. Bei Flächenlichtmodulatoren sind die MEMS-Aktuator-Elemente häufig als 2-dimensionales Array ausgebildet und bewegen bzw. positionieren damit mechanisch verbundene Mikrospiegel. Im Gegensatz zum Stand der Technik, bei dem der Maximalbereich des Strokes zwischen der minimalen Auslenkungsposition im spannungsfreien Zustand (oder an einem mechanischen Anschlag) und der maximalen Auslenkungsposition mit einer maximalen bzw. symmetrischen Überlappung der ersten und zweiten Elektrodenstruktur (auch: symmetrisches Eintauchen) vorliegt, kann gemäß Ausführungsbeispielen des vorliegenden Konzepts durch die definierten Designparameter des MEMS-Aktuator-Elements ein möglichst großer nutzbarer Auslenkungsweg (= der gewünschte maximale Auslenkungsweg, der durch den jeweiligen Anwendungsfall vorgegeben wird) erhalten und eingestellt werden, wobei das resultierende MEMS-Aktuator-Element für den Anwendungsfall minimale Abmessungen (Pitch), minimale Antriebsspannungen mit einem relativ geringen Übersprechen zu Nachbarpixeln und eine hohe Linearität der Kennlinie im gesamten Auslenkungsbereich des MEMS-Aktuator-Elements aufweisen kann. Ausführungsbeispiele werden nachfolgend Bezug nehmend auf die beiliegenden Zeichnungen erläutert. Es zeigen:
Die Ausführungsbeispiele dienen der Erläuterung der verschiedenen Merkmale und Ausführungen der Erfindung. Sie sind auch Ausführungsbeispiele der Erfindung selbst sobald das entsprechende Aktuator-Element insgesamt entsprechend dem Anspruch 1 ausgeführt ist. Bevor nachfolgend Ausführungsbeispiele des vorliegenden Konzepts im Detail anhand der Zeichnungen näher erläutert wird, wird darauf hingewiesen, dass identische, funktionsgleiche oder gleichwirkende Elemente, Objekte, Funktionsblöcke und/oder Verfahrensschritte in den unterschiedlichen Figuren mit den gleichen Bezugszeichen versehen sind, so dass die in unterschiedlichen Ausführungsbeispielen dargestellte Beschreibung dieser Elemente, Objekte, Funktionsblöcke und/oder Verfahrensschritte untereinander austauschbar ist bzw. aufeinander angewendet werden kann. Verschiedene Ausführungsbeispiele werden nun ausführlicher Bezug nehmend auf die beiliegenden Zeichnungen beschrieben, in denen einige Ausführungsbeispiele dargestellt sind. In den Figuren können Abmessungen von dargestellten Elementen, Schichten und/oder Bereichen zur Verdeutlichung nicht maßstäblich dargestellt sein. Es versteht sich, dass, wenn ein Element als mit einem anderen Element "verbunden" oder "gekoppelt" bezeichnet wird, es direkt mit dem anderen Element verbunden oder gekoppelt sein kann oder Zwischenelemente vorhanden sein können. Wenn im Gegensatz ein Element als "direkt" mit einem anderen Element "verbunden" oder "gekoppelt" bezeichnet wird, sind keine Zwischenelemente vorhanden. Sonstige zum Beschreiben des Verhältnisses zwischen Elementen benutzten Ausdrücke sollten auf gleichartige Weise ausgelegt werden (z.B. "zwischen" gegenüber "direkt zwischen", "benachbart" gegenüber "direkt benachbart" usw.). Zur Vereinfachung der Beschreibung der unterschiedlichen Ausführungsbeispiele weisen die Figuren ein kartesisches Koordinatensystem x, y, z auf, wobei die die x-y-Ebene dem Hauptoberflächenbereich des Trägers bzw. Substrats entspricht bzw. parallel zu demselben ist und wobei die vertikale Richtung senkrecht zu der x-y-Ebene ist. In der folgenden Beschreibung bedeutet der Ausdruck "lateral" oder horizontal eine Richtung in der x-y-Ebene (oder parallel dazu), wobei der Ausdruck "vertikal" eine Richtung in der ±z-Richtung (oder parallel dazu) angibt. Nachfolgende Beispiele beziehen sich auf mikroelektromechanische Systeme (MEMS), die dazu ausgelegt sind, eine bewegliche Elektrodenstruktur auszulenken, die mechanisch mit einem Funktionselement gekoppelt sein kann. Obwohl sich nachfolgende Ausführungsbeispiele auf bewegliche Funktionselemente beziehen, die einen Spiegel, insbesondere einen Mikrospiegel umfassen, so können auch beliebige andere Funktionselemente angeordnet werden, sowohl im optischen Bereich, etwa Linsen, Filter oder dergleichen, aber auch in anderen Bereichen, etwa zum Herstellen eines elektrischen Kontaktes oder dem Verändern eines mechanischen Abstandes. MEMS können in Halbleitertechnologie hergestellt sein, wobei hierfür insbesondere mehrschichtige Anordnungen in Betracht kommen, darunter leitende, isolierende und halbleitende Schichten, die durch ebensolche Schichten oder Luftspalte beabstandet sein können. MEMS können beispielsweise durch einen mehrschichtigen Lagenaufbau erhalten werden, welcher durch selektives Entfernen von Stapelmaterial, beispielsweise durch einen Ätzprozess, reduziert wird, um MEMS-Strukturen freizulegen. Als Substrat kann beispielsweise ein Siliziummaterial, beispielsweise monokristallines Silizium, polykristallines Silizium oder ein dotiertes Siliziummaterial, verwendet werden. In unterschiedlichen Schichten kann eine Leitfähigkeit erzeugt werden, beispielsweise um die Funktionalität einer Elektrode bereitzustellen. Andere Schichten können beispielsweise metallisiert werden, etwa um eine reflektierende Oberfläche und/oder eine elektrisch leitfähige Oberfläche herzustellen. Im Folgenden wird anhand der Das MEMS-Aktuator-Element 10 umfasst ein Substrat 12, beispielsweise einen vollständigen Wafer bzw. Halbleiter-Wafer oder alternativ einen teilweise oder ganz vereinzelten Abschnitt des Wafers. Das Substrat 12 kann einen Hauptoberflächenbereich 12-A parallel zu der Substratebene (parallel zur x-y-Ebene) ausbilden und sich zumindest teilweise in der Substratebene erstrecken. Die Substratebene ist beispielsweise parallel zu einer Hauptseite 12-A eines Wafers (nicht gezeigt in Das MEMS-Aktuator-Element 10 umfasst ferner eine erste Elektrodenstruktur 14 mit einer Kantenstruktur 14-1, wobei die erste Elektrodenstruktur 14 mit der Kantenstruktur 14-1 bezüglich des Substrats 12 feststehend angeordnet ist. Die erste Elektrodenstruktur 14 mit der Kantenstruktur 14-1 kann direkt an dem Hauptoberflächenbereich 12-A des Substrats 12 angeordnet sein. Das MEMS-Aktuator-Element 10 umfasst ferner eine zweite Elektrodenstruktur 16 mit einer Kantenstruktur 16-1, wobei die zweite Elektrodenstruktur 16 mittels einer Federstruktur 18 auslenkbar mit dem Substrat 12 gekoppelt ist und mittels der ersten Elektrodenstruktur 14 elektrostatisch auslenkbar ist, um die Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in eine Zwischenposition bzw. Auslenkungsposition z1 zwischen einer minimalen Auslenkungsposition zMIN und einer vertikal beabstandeten maximalen Auslenkungsposition zMAX zu bewegen, wobei die minimale und maximale Auslenkungsposition zMIN, zMAX einen maximalen Auslenkungsweg bzw. Stroke zS vorgeben (siehe auch Bei dem MEMS-Aktuator-Element 10 sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 hinsichtlich einer Draufsicht, z.B. in einem lateralen Abstand x0, gegenüberstehend ausgebildet und in der minimalen Auslenkposition zMIN vertikal, z.B. in einem vertikalen Abstand z0, voneinander beabstandet sind (siehe auch Der laterale Abstand x0 bezieht sich (in einer Draufsicht) auf lateral gegenüberliegende Abschnitte der Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16, während sich der vertikale Abstand z0 auf vertikal versetzte, gegenüberliegende Randebenen 14-E, 16-E der Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 bezieht. Dabei erstreckt sich die Randebene 14-E der ersten Elektrodenstruktur 14 entlang des oberen Hauptoberflächenbereichs 14-A der ersten Elektrodenstruktur 14, wobei sich die Randebene 16-E der zweiten Elektrodenstruktur 16 entlang des unteren Hauptoberflächenbereichs 16-B der zweiten Elektrodenstruktur 16 erstreckt. (siehe auch Bei dem MEMS-Aktuator-Element 10 beträgt erfindungsgemäß in der maximalen Auslenkposition zMAX der vertikale Eintauchweg "zE" (oder Überlapp bzw. vertikaler Überlapp) der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zs, d.h. zE ≤ 0,5 zS. Im Folgenden wird nun zunächst auf die in Wie in Ausführungsbeispiele beziehen sich somit auf mikromechanische Aktuatoren 10, die elektrostatisch z.B. mit einer Biasspannung UBIAS angesteuert werden und über eine rückstellende elastische Aufhängung 18 verfügen, die für eine statische Gleichgewichts-Auslenkung eine entsprechende Gegenkraft aufbringt, um die zweite Elektrodenstruktur 16 in die minimale Auslenkposition zMIN zu bringen. Das MEMS-Aktuator-Element 10 kann ferner ein Funktionselement 20 aufweisen, das mittels des Verbindungselementes 18-3 auch mit der zweiten Elektrodenstruktur 16 mechanisch fest gekoppelt ist. Das Funktionselement 20 kann ein Element sein, dessen translatorische und/oder rotatorische Position durch die elektrostatische Auslenkung zwischen der ersten und zweiten Elektrodenstruktur 14, 16 eingestellt, gesteuert oder zumindest beeinflusst werden kann. Beispielsweise kann das Funktionselement 20 ein Mikrospiegel und/oder eine elektrisch leitfähige Struktur sein. Gemäß einem Ausführungsbeispiel kann das Verbindungselement 18-3 an einem Flächenschwerpunkt des Funktionselements 20 mechanisch mit demselben gekoppelt sein, wobei das Verbindungselement 18-3 ferner an einem Flächenschwerpunkt der zweiten Elektrodenstruktur 16 mit derselben mechanisch gekoppelt sein kann. Diese symmetrische Anordnung ist nur beispielhaft anzusehen, wobei andere Konfiguration gewählt werden können, wie dies in nachfolgenden Ausführungsbeispielen noch dargestellt wird. Wie in In diesem Fall wird beispielsweise auch von einem "Kammantrieb" (engl. comb drive), der durch die erste und zweite Elektrodenstruktur 14, 16 gebildet ist, gesprochen. In diesem Zusammenhang wird aber darauf hingewiesen, dass der Begriff "Kammantrieb" nicht einschränkend zu verstehen ist, da auch für die erste und/oder zweite Elektrodenstruktur 14, 16 auch nur mit wenigen Finger- oder Kammelementen 14-2, 16-2 eingesetzt werden können. Ferner können gemäß dem vorliegenden Funktionsprinzip die erste und/oder zweite Elektrodenstruktur 14, 16 als Kantenelemente ohne Finger- oder Kammelemente eingesetzt werden, wobei die erste und zweite Elektrodenstruktur 14, 16 gleichermaßen nach den hier beschriebenen Grundlagen funktionieren. So kann beispielsweise die erste Elektrodenstruktur 14 in einer Draufsicht (und parallel zur x-y-Ebene) als eine umlaufende Struktur zu der zweiten Elektrodenstruktur 16 ausgebildet sein. Allgemein kann dann auch von einem elektrostatischen Kantenaktuator-Element gesprochen werden, da die Aktuatorkraft proportional zu der Länge der sich gegenüberstehenden Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 ist. Soweit es die herstellbaren Strukturgrößen erlauben, sind daher eine Finger- oder Kammstruktur für die Kantenstruktur 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 effektiver einsetzbar, wobei in So sind in Wie in In der minimalen Auslenkposition zMIN sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 vertikal (= parallel zur z-Richtung) in einem Abstand z0 voneinander beabstandet sind, wobei in der maximalen Auslenkposition zMAX das Fingerelement 16-2 der zweiten Elektrodenstruktur 16 vertikal zwischen die beiden Fingerelemente 14-2 der ersten Elektrodenstruktur "eingetaucht" ist. Bei dem MEMS-Aktuator-Element 10 beträgt in der maximalen Auslenkposition zMAX der vertikale Eintauchweg "zE" (oder Überlapp) der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zs, d.h. zE ≤ 0,5 zS. Die Wegstrecke zwischen der minimalen Auslenkungsposition zMIN und der maximalen Eintauchposition zMAX wird als maximaler Auslenkungsweg bzw. Stroke zS bezeichnet, und erstreckt sich entlang der Auslenkungspositionen bzw. Auslenkungszwischenpositionen z1mit 0 ≤ z1 ≤ zS, wobei die unterschiedlichen Auslenkungspositionen bzw. Auslenkungszwischenpositionen z1 (zwischen zMIN und zMAX) als gestrichelte Linie angegeben sind. Bei dem MEMS-Aktuator-Element 10 sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 hinsichtlich einer Draufsicht in einem lateralen Abstand x0 gegenüberstehend ausgebildet. Gemäß einem Ausführungsbeispiel können das MEMS-Aktuator-Element 10 ein Mikrospiegelelement als das Funktionselement 20 aufweisen, das mit der zweiten Elektrodenstruktur 16 gekoppelt ist. Bei Anwendungen für sichtbares Licht können beispielsweise für eine Minimalstruktur folgende Abmessungen des MEMS-Aktuator-Elements 10 vorliegen: zS = 320nm, zE = zS/4 = 80nm, z0 = zS - zE = 240nm, z0 = 0,8 zS ≈ 250nm, d14 = d16 = 0,9 zS = 300nm, b14 = b16 = 400nm. Diese Werte sind nur als beispielhaft anzusehen und können je nach Anwendungsgebiet des MEMS-Aktuator-Elements 10 variieren. Diese beispielhaften Werte können je nach Anwendungsgebiet des MEMS-Aktuator-Elements 10 beispielsweise um einen gemeinsamen Faktor von 0,5 bis 2 variieren, mit 160nm ≤ zS ≤ 640nm oder um einen gemeinsamen Faktor von 0,8 bis 1,2 variieren, mit 256nm ≤ zS ≤ 384nm. Gemäß einem Ausführungsbeispiel sind also die erste und zweite Elektrodenstruktur 14, 16 ausgebildet, um basierend auf einer elektrischen Ansteuerspannung VS die zweite Elektrodenstruktur 16 in eine Zwischenposition z1 zwischen der minimalen Auslenkungsposition zMIN und der maximalen Auslenkungsposition zMAX elektrostatisch auszulenken. Dabei bewirkt ein Minimalwert der Ansteuerspannung VS eine Positionierung oder Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die minimale Auslenkungsposition zMIN und ein Maximalwert der Ansteuerspannung Vs eine Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die maximale Auslenkungsposition zMAX. Der Ansteuerspannungsbereich (= Adressspannungsbereich) liegt zwischen der minimalen Wert VS-MIN der Ansteuerspannung VS und dem maximalen Wert VS_MAX der Ansteuerspannung Vs. Fermer bewirkt eine Änderung der Ansteuerspannung Vs in einen Spannungswert zwischen der minimalen Ansteuerspannung VS_MIN und der maximalen Ansteuerspannung VS_MAX eine entsprechende Änderung der Zwischenposition z1 der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 zwischen deren minimaler und maximaler Auslenkungsposition zMIN und zMAX. Gemäß der Erfindung weist das MEMS-Aktuator-Element 10 ferner eine Ansteuereinrichtung 22 zum Bereitstellen der Ansteuerspannung VS zwischen der ersten und zweiten Elektrodenstruktur 14, 16 des MEMS-Aktuator-Elements 10 auf. Die Ansteuereinrichtung 22 kann beispielsweise in das Halbeitermaterial des Substrats 12 integriert sein oder auch extern zu dem Substrat 12 angeordnet sein und elektrisch mit der ersten und zweiten Elektrodenstruktur 14, 16 verbunden sein. Gemäß einem Ausführungsbeispiel kann die Ansteuerspannung VS einen Vorspannungsanteil (eine Biasspannung) VBIAS und einen Betriebsspannungsanteil VBETRIEB aufweisen. Abhängig von dem Aufbau und der Dimensionierung der Elemente des MEMS-Aktuator-Elements 10 und insbesondere der Federstruktur 18 können für die Biasspannung VBIAS, d. h. die minimale Ansteuerspannung, unterschiedliche, feste Werte gewählt werden. Wird beispielsweise die Bias-Spannung VBIAS gleich 0 V (VBIAS = 0 V) gewählt, entspricht die minimale Auslenkungsposition zMIN der spannungsfreien Ruhelage der zweiten Elektrodenstruktur 16 bezüglich der ersten Elektrodenstruktur 14. Wird beispielsweise die Bias-Spannung VBIAS ungleich 0 V (VBIAS ≠ 0 V) gewählt, unterscheidet sich die minimale Auslenkungsposition zMIN der zweiten Elektrodenstruktur 16 zu der ersten Elektrodenstruktur 14 von der spannungsfreien Ruhelage. Wie dies im Nachfolgenden noch näher erläutert wird, kann das Anlegen einer festen (= konstanten) Bias-Spannung VBIAS ungleich 0 für eine erhöhte Linearität der Auslenkungskennlinie des MEMS-Aktuator-Elements 10 über der Ansteuerspannung VS insbesondere im Bereich relativ geringer Auslenkungen z1 aus der Ruhelage (= minimale Auslenkungsposition zMIN) sorgen. Gemäß der Erfindung ist das MEMS-Aktuator-Element 10 ausgelegt, so dass in der maximalen Auslenkungsposition zMAX der vertikale Eintauchweg zE der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 bezüglich die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zS, d.h. zE ≤ 0,5 zS beträgt. Gemäß einem Ausführungsbeispiel kann der vertikale Eintauchweg zE ferner zwischen dem 0,1- und 0,4-fachen oder zwischen dem 0,2- und dem 0,3-fachen des maximalen Auslenkungswegs zS betragen. Gemäß der Erfindung ist das MEMS-Aktuator-Element 10 ferner ausgelegt, so dass die erste und zweite Elektrodenstruktur 14, 16 in einer Ebene parallel zu dem Substrat 12 um einen lateralen Mindestabstand x0 beabstandet sind, wobei der laterale Mindestabstand x0 das 0,5- bis 1,5-fache oder das 0,6- bis 1-fache des maximalen Auslenkungswegs zS beträgt. Gemäß der Erfindung ist das MEMS-Aktuator-Element 10 ferner ausgelegt, so dass die vertikale Dicke d14, d16 der ersten und/oder zweiten Elektrodenstruktur 14, 16 das 0,6- bis 1,2-fache oder das 0,8- bis 1,0-fache des maximalen Auslenkungswegs zS beträgt. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner ausgelegt sein, so dass die minimale Ansteuerspannung als eine Biasspannung UBIAS bereitgestellt wird, wobei die elektrische Ansteuerspannung VS die Biasspannung UBIAS und die Betriebsspannung (Adressspannung) VBETRIEB aufweist, wobei die Biasspannung VBIAS in einem Bereich zwischen dem 0,5-fachen bis 2-fachen oder dem 0,8-fachen bis 1,5-fachen des Betriebsspannungsbereichs liegen kann (siehe auch Bei Kammantrieben bzw. Kantenantrieben gemäß den beschriebenen Ausführungsbeispielen kann das elektrostatische Feld durch den relativ geringen Elektrodenabstand räumlich eng im Bereich der Elektrodenfinger 14-2, 16-2 begrenzt werden. Dadurch können relative hohe Aktuatorkräfte selbst bei der fertigungsbedingten Minimalgröße der Elektrodenstrukturen 14, 16 mit nur einigen wenigen Fingerelementen 14-2, 16-2 erreicht werden. Dazu erlaubt der beschriebene Kamm- bzw. Kantenantrieb ein geringes Übersprechen zwischen benachbarten Aktuatoren 10. Gemäß einem Ausführungsbeispiel kann die Elektrodenstruktur mit dem gemeinsamen Potenzial UBIAS aller Pixel bzw. Aktuatoren 10 an den Rand des Pixels 10 gelegt werden. Wenn dies die feste Elektrodenstruktur 14 ist, kann diese wie in Bezüglich der Darstellung in Zur Linearisierung der Auslenkungskennlinie gegenüber dem Ansteuersignal VS bei erträglichem Verlust an maximaler Aktuatorkraft ergeben sich besonders gute Gesamtergebnisse, wenn die Designparameter wie folgt optimiert werden (je nach Gewichtung der verschiedenen Zielparameter für das gewünschte Design und die gewünschte Funktionalität der MEMS-Aktuator-Elemente 10): in der Endlage (= maximale Auslenkposition), der gewünschten Vollauslenkung bei maximaler Adressspannung (= Betriebsspannung), entsteht ein nur geringer Überlapp (= Eintauchtiefe) der statischen und beweglichen Elektrodenebenen von nur näherungsweise 0% bis 50% des Strokes (= Auslenkungsbereich zwischen minimaler und maximaler Adressspannung), oder von 10% bis 40%, oder von 20% bis 30%. Ein großer Teil des Auslenkungsbereichs findet daher mit nicht überlappenden Elektroden statt. Der horizontale Elektrodenabstand wird mit 50% bis 150% des Strokes gewählt, oder 60% bis 100%, und die Dicke der Elektroden (= Ausdehnung in Auslenkungsrichtung) wird mit 60% bis 120% des Strokes, oder von 80% bis 100% gewählt. Die Biasspannung kann vorteilhaft im Bereich von 50% bis 200%, oder von 80% bis 150%, des für die Pixel individuellen Adressspannungsbereichs liegen. Der horizontale Elektrodenabstand von 50 % bis 150 % bzw. von 60 % bis 100 % des Strokes zS ist dabei beispielsweise der mittlere oder durchschnittliche (d.h. wirksame oder effektive) horizontale (laterale) der ersten und zweiten Elektrodenstruktur in einer Ebene parallel zu einem Hauptoberflächenbereich des Substrats. Entsprechend ist die vertikale Dicke der ersten und zweiten Elektrodenstruktur dabei die mittlere oder durchschnittliche (d.h. wirksame oder effektive) Dicke der ersten und zweiten Elektrodenstruktur und beträgt beispielsweise 60 % bis 120 % oder 80 % bis 100 % des Strokes. Basierend auf den obigen Designparametern für das MEMS-Aktuator-Element kann nun die für die jeweilige Anwendung gewünschte bzw. geforderte maximale Auslenkung zS (Stroke) eingestellt werden, wobei für diese durch die Anwendung geforderte bzw. vorgegebene Größe der maximalen Auslenkung ein MEMS-Aktuator-Element mit für den jeweiligen Anwendungsfall optimierten (= minimalen) Abmessungen (Pitch), einer optimierten (= minimalen) Antriebsspannung, einer linearen Kennlinie und einem geringen Übersprechen zu benachbarten MEMS-Aktuator-Elementen erhalten werden kann. So bewirkt eine Änderung der Ansteuerspannung Vs, mit Vs = VBIAS + VBETRIEB, in einen Spannungswert zwischen der minimalen Ansteuerspannung VS_MIN und der maximalen Ansteuerspannung VS_MAX eine entsprechende Änderung der Zwischenposition z1 der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 zwischen deren minimaler und maximaler Auslenkungsposition zMIN und zMAX. In Dabei sorgt der Überlapp in der Endlage (d.h. die vertikale Eintauchweg zE der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 bezüglich die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14) für eine große maximale Aktuatorkraft zwischen der ersten und zweiten Elektrodenstruktur 14, 16, wobei der geringe Betrag des ÜberlappszE und der nicht zu kleine horizontale Abstand x0 wiederum für moderate horizontale Kräfte zwischen der ersten und zweiten Elektrodenstruktur 14, 16 z.B. bei Fertigungsungenauigkeiten, sorgen. Die begrenzte Elektrodendicke d14, d16 der ersten und zweiten Elektrodenstruktur 14, 16 bewirkt, dass die Aktuatorkraft für eine gegebene Ansteuerspannung VS bei zunehmender Auslenkung z1 sogar wieder abnimmt, da die Aktuatorkraft in der theoretischen Symmetrielage (zE = d14) mit voll eingetauchten Elektrodenstrukturen 14, 16 notwendig Null ist, wobei die Kennlinie für große Ansteuerspannungen VS damit nicht so steil wird wie in elektrostatischen Aktuatoren sonst üblich. Die theoretische Symmetrielage (mit zE = d14) wird aber gemäß Ausführungsbeispielen nicht erreicht, da gemäß Ausführungsbeispielen der vertikale Eintauchweg "zE" (oder Überlapp) der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zS beträgt, d.h. zE ≤ 0,5 zS. Damit wird eine Linearisierung der Auslenkungskennlinie (d.h. die Aktuatorposition bzw. -Auslenkung vs. Adressspannung) im Bereich großer Auslenkungen z1 erreicht. Die Biasspannung VBIAS schließlich sorgt für eine bessere Linearität im Bereich geringer Auslenkungen. Wie in Gemäß dem Ausführungsbeispiel von In diesem Zusammenhang wird nochmals darauf hingewiesen, dass der Begriff "Kammantrieb" (comb drive) hier (gerade mit Hinblick auf sehr kleine Pixel 10) sehr allgemein verstanden werden soll, da auch Elektrodenstrukturen 14, 16 mit nur wenigen Fingerelementen 14-2, 16-2 oder auch Elektrodenstrukturen 14, 16 ganz ohne Fingerelemente nach den gleichen Grundlagen funktionieren. So können gemäß dem vorliegenden Funktionsprinzip die erste und/oder zweite Elektrodenstruktur 14, 16 als Kantenelemente ohne Finger- oder Kammelemente eingesetzt werden, wobei die erste und zweite Elektrodenstruktur 14, 16 gleichermaßen nach den hier beschriebenen Grundlagen funktionieren. So kann beispielsweise die erste Elektrodenstruktur 14 in einer Draufsicht (parallel zur x-y-Ebene) als eine umlaufende Struktur zu der zweiten Elektrodenstruktur 16 ausgebildet sein. Allgemein kann dann auch von einem elektrostatischen Kantenaktuator-Element gesprochen werden, da die Aktuatorkraft proportional zu der Länge der sich gegenüberstehenden Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 ist. Das Vorsehen von Fingerelementen 14-2, 16-2 kann weitere Vorteil bereitstellen, soweit es die herstellbaren (minimalen) Strukturgrößen erlauben. Das MEMS-Aktuator-Element 10 umfasst wieder die erste Elektrodenstruktur 14 mit einer Kantenstruktur 14-1, wobei die erste Elektrodenstruktur 14 mit der Kantenstruktur 14-1 bezüglich des Substrats 12 feststehend angeordnet ist. Die erste Elektrodenstruktur 14 mit der Kantenstruktur 14-1 ist mittels Abstandselementen 15 beabstandet von dem Hauptoberflächenbereich 12-A des Substrats 12 angeordnet. Die Abstandselemente (Spacer) 15 können Teil der ersten Elektrodenstruktur 14 und/oder des Substrats 12 sein. Das MEMS-Aktuator-Element 10 weist eine oben-liegende ersten Elektrodenstruktur (Stator) 14 mit den Fingerelementen (Statorfingern) 14-2 der Kantenstruktur 14-1 auf, wobei die zweite Elektrodenstruktur (Aktor) 16 mit den Fingerelement (Aktorfinger) 16-2 der Kantenstruktur 16-1 (in der Ruheposition zMIN) vertikal zwischen der ersten Elektrodenstruktur 14 und dem Substrat 12 angeordnet ist. Der laterale Abstand x0 bezieht sich (in einer Draufsicht) wieder auf lateral gegenüberliegende Abschnitte der Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16, während sich der vertikale Abstand z0 auf vertikal versetzte, gegenüberliegende Randebenen 14-E, 16-E der Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 bezieht. Dabei erstreckt sich die Randebene 14-E der ersten Elektrodenstruktur 14 entlang des unteren Hauptoberflächenbereichs 14-B der ersten Elektrodenstruktur 14, wobei sich die Randebene 16-E der zweiten Elektrodenstruktur 16 entlang des oberen Hauptoberflächenbereichs 16-A der zweiten Elektrodenstruktur 16 erstreckt. Das MEMS-Aktuator-Element 10 kann ferner eine leitfähige Grundplatte 12-1 zur Abschirmung des Einflusses der darunter liegenden Elektronik (nicht gezeigt) aufweisen. Die leitfähige Grundplatte 12-1 kann als Teil des Substrats 12 ausgebildet sein. Anders als in den obigen Ausführungsbeispielen kann es vorteilhaft sein, die feste Elektrodenstruktur 14 (den Stator) vertikal oberhalb der beweglichen Elektrodenstruktur 16 anzuordnen, also auf der dem Substrat 12 abgewandten Seite wie dies in Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 eine dritte Elektrodenstruktur 24 aufweisen, die bezüglich des Substrats 12 feststehend angeordnet ist, wobei die zweite Elektrodenstruktur 16 (z.B. symmetrisch) zwischen der ersten und dritten Elektrodenstruktur 14, 24 angeordnet und auslenkbar ist. Dabei ist die zweite Elektrodenstruktur 16 mittels der ersten und dritten Elektrodenstruktur 14, 24 elektrostatisch von der minimalen Auslenkungsposition (= Ruheposition) zMIN in eine vertikal beabstandete, weitere maximale Auslenkungsposition (= ober maximale Auslenkungsposition) zMAX' bewegbar. So sind in Bezüglich der geometrischen Anordnung der ersten und zweiten Elektrodenstruktur 14, 16 wird auf die Ausführungen zu Wie in Die gestrichelte Darstellung des Fingerelements 16-2 gibt beispielsweise eine minimale Auslenkungsposition (Grundposition oder Ausgangslage) zMIN der zweiten Elektrodenstruktur 16 wieder, während die durchgehend gezeichnete (vertikal) untere Fingerstruktur 16-2 der zweiten Elektrodenstruktur 16 die maximale Auslenkposition zMAX (= untere Endlage) der zweiten Elektrodenstruktur 16 darstellt und die weitere durchgehend gezeichnete (vertikal) obere Fingerstruktur 16-2 der zweiten Elektrodenstruktur 16 die weitere maximale Auslenkposition z'MAX (= obere Endlage) der zweiten Elektrodenstruktur 16 darstellt. In der minimalen Auslenkposition zMIN sind die Kantenstrukturen 16-1, 24-1 der zweiten und dritten Elektrodenstruktur 16, 24 vertikal (= parallel zur z-Richtung) in einem Abstand z'0 voneinander beabstandet sind, wobei in der weiteren maximalen Auslenkposition z'MAX das Fingerelement 16-2 der zweiten Elektrodenstruktur 16 vertikal zwischen die beiden Fingerelemente 24-2 der dritten Elektrodenstruktur "eingetaucht" ist. Bei dem MEMS-Aktuator-Element 10 beträgt in der weiteren maximalen Auslenkposition z'MAX der vertikale Eintauchweg z'E (oder Überlapp) der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 24-1 der dritten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs z's, d.h. z'E ≤ 0,5 z'S. Die Wegstrecke zwischen der Ruheposition zMIN und der weiteren maximalen Eintauchposition z'MAX wird als weiterer maximaler Auslenkungsweg bzw. Stroke z's bezeichnet, und erstreckt sich entlang der Auslenkungspositionen bzw. Auslenkungszwischenpositionen z1. Bei dem MEMS-Aktuator-Element 10 sind die Kantenstrukturen 16-1, 24-1 der zweiten und dritten Elektrodenstruktur 16, 24 hinsichtlich einer Draufsicht in einem lateralen Abstand x0 gegenüberstehend ausgebildet. Die Wegstrecke zwischen der Ruheposition zMIN und der maximalen Eintauchposition zMAX, d.h. der maximale Auslenkungsweg bzw. Stroke zS, und die Wegstrecke zwischen der Ruheposition zMIN und der weiteren maximalen Eintauchposition z'MAX, d.h. der weitere maximale Auslenkungsweg bzw. Stroke z'S, addieren sich somit zu dem Gesamt-Stroke zSG (mit zSG = zS + z'S). Gemäß einem Ausführungsbeispiel können der maximale Auslenkungsweg zS und der weitere maximale Auslenkungsweg z's (innerhalb eines Toleranzbereichs von ≤ 5% oder 10%) gleich sein, wobei kleinere Abweichungen und Toleranzen zwischen zS und z's das beschriebene Funktionsprinzip der MEMS-Aktuator-Elements 10 nicht beeinträchtigen. Gemäß einem Ausführungsbeispiel sind also die zweite und dritte Elektrodenstruktur 16, 24 ausgebildet, um basierend auf einer weiteren elektrischen Ansteuerspannung V'S die zweite Elektrodenstruktur 16 in die weitere Zwischenposition z'1 zwischen der minimalen Auslenkungsposition zMIN und der weiteren maximalen Auslenkungsposition z'MAX elektrostatisch auszulenken. Dabei bewirkt ein Minimalwert der Ansteuerspannung V'S eine Positionierung oder Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die minimale Auslenkungsposition zMIN und ein weiterer Maximalwert der Ansteuerspannung V's eine Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die weitere maximale Auslenkungsposition z'MAX. Der weitere Ansteuerspannungsbereich (= Adressspannungsbereich) liegt zwischen der minimalen Wert V_MIN der Ansteuerspannung V'S und dem weiteren maximalen Wert V'_MAX der Ansteuerspannung V'S. Ferner bewirkt eine Änderung der Ansteuerspannung V'S in einen Spannungswert zwischen der minimalen Ansteuerspannung VS_MIN und der weiteren maximalen Ansteuerspannung V'S_MAX eine entsprechende Änderung der weiteren Zwischenposition z'1 der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 zwischen deren minimaler Auslenkungsposition zMIN und der weiteren maximaler Auslenkungsposition z'MAX. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner die Ansteuereinrichtung 22 zum Bereitstellen der weiteren Ansteuerspannung V's zwischen der zweiten und dritten Elektrodenstruktur 16, 24 aufweisen. Gemäß einem Ausführungsbeispiel kann die weitere Ansteuerspannung V'S einen Vorspannungsanteil (eine Biasspannung) VBIAS und einen weiteren Betriebsspannungsanteil V'BETRIEB aufweisen. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ausgelegt sein, so dass in der weiteren maximalen Auslenkungsposition z'MAX der weitere vertikale Eintauchweg z'E der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 bezüglich der Kantenstruktur 24-1 der dritten Elektrodenstruktur 24 bis zu dem 0,5-fachen des weiteren maximalen Auslenkungswegs z'S, d.h. z'E ≤ 0,5 z's beträgt. Gemäß einem Ausführungsbeispiel kann der weitere vertikale Eintauchweg z'E ferner zwischen dem 0,1- und 0,4-fachen oder zwischen dem 0,2- und dem 0,3-fachen des weiteren maximalen Auslenkungswegs z's betragen. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner ausgelegt sein, so dass die zweite und dritte Elektrodenstruktur 16, 24 in einer Ebene parallel zu dem Substrat 12 um einen lateralen Mindestabstand x0 beabstandet sind, wobei der laterale Mindestabstand x0 das 0,5- bis 1,5-fache oder das 0,6- bis 1-fache des weiteren maximalen Auslenkungswegs z'S beträgt. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner ausgelegt sein, so dass die vertikale Dicke d24 der dritten Elektrodenstruktur 24 das 0,6- bis 1,2-fache oder das 0,8- bis 1,0-fache des weiteren maximalen Auslenkungswegs z'S beträgt. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner ausgelegt sein, so dass die minimale Ansteuerspannung als eine Biasspannung UBIAS bereitgestellt wird, wobei die weitere elektrische Ansteuerspannung V'S die Biasspannung UBIAS und die weitere Betriebsspannung (Adressspannung) V'BETRIEB aufweist, wobei die Biasspannung VBIAS in einem Bereich zwischen dem 0,5-fachen bis 2-fachen oder dem 0,8-fachen bis 1,5-fachen des weiteren Betriebsspannungsbereichs liegen kann. Bei Kammantrieben bzw. Kantenantrieben gemäß den beschriebenen Ausführungsbeispielen kann das elektrostatische Feld durch den relativ geringen Elektrodenabstand räumlich eng im Bereich der Elektrodenfinger 14-2, 16-2, 24-2 begrenzt werden. Dadurch können relative hohe Aktuatorkräfte selbst bei der fertigungsbedingten Minimalgröße der Elektrodenstrukturen 14, 16, 24 mit nur einigen wenigen Fingerelementen 14-2, 16-2, 24-2 erreicht werden. Dazu erlaubt der beschriebene Kamm- bzw. Kantenantrieb ein geringes Übersprechen zwischen benachbarten Aktuatoren 10. Gemäß einem Ausführungsbeispiel kann die Elektrodenstruktur 14 oder 16 mit dem gemeinsamen Potenzial UBIAS aller Pixel bzw. Aktuatoren 10 an dem Rand des Pixels 10 liegen. Wenn dies die feste Elektrodenstruktur 14 ist, kann diese direkt mit der festen Elektrodenstruktur 14, 24 des Nachbarpixels (nicht gezeigt in Die obigen Ausführungen zu dem MEMS-Aktuator-Element 10 von Wie bereits im Vorhergehenden angegeben wurde, kann das MEMS-Aktuator-Element 10 gemäß Ausführungsbeispielen ausgebildet sein, dass die zweite Elektrodenstruktur 16 translatorisch oder rotatorisch (= kippend oder drehend) bezüglich der ersten Elektrodenstruktur 14 auslenkbar ist, dass die zweite Elektrodenstruktur 16 translatorisch und rotatorisch bezüglich der ersten Elektrodenstruktur 14 auslenkbar ist, dass die zweite Elektrodenstruktur 16 translatorisch oder rotatorisch bezüglich der ersten und dritten Elektrodenstruktur 14, 24 auslenkbar ist, oder dass die zweite Elektrodenstruktur 16 translatorisch und rotatorisch bezüglich der ersten und dritten Elektrodenstruktur 14, 24 auslenkbar ist. Auch wenn im Vorhergehenden verschiedene Ausführungsbeispiele und die Wortwahl der Beschreibung sich auf translatorischen MEMS-Aktuator-Elemente 10, z.B. mit parallel auslenkenden Mikrospiegel (Senkspiegel), beziehen, ist das vorliegende erfindungsgemäße Konzept auch für andere MEMS-Elemente geeignet, speziell auch MEMS-Aktuator-Elemente 10 ohne Spiegel. Auch rotatorische MEMS-Aktuator-Element 10 (Aktuatoren) können auf diese Weise optimiert werden, wobei der für die translatorischen MEMS-Aktuator-Elemente 10, die z.B. Senkspiegel aufweisen können, definierte Stroke zS dann durch die mit dem Abstand von der Drehachse gewichtete mittlere Auslenkung der Kantenstruktur(en) des rotatorischen MEMS-Aktuator-Elements 10 ersetzt werden kann. Das MEMS-Aktuator-Element 10 umfasst ferner die erste Elektrodenstruktur 14 mit der Kantenstruktur 14-1 bzw. den Fingerelementen 14-2, wobei die erste Elektrodenstruktur 14 bezüglich des Substrats 12 feststehend angeordnet ist. Die erste Elektrodenstruktur 14 kann beispielsweise direkt an oder auch beabstandet von dem Hauptoberflächenbereich 12-A des Substrats 12 feststehend angeordnet sein. Das MEMS-Aktuator-Element 10 umfasst ferner eine zweite Elektrodenstruktur 16 mit einer Kantenstruktur 16-1 bzw. Fingerelementen 16-2, wobei die zweite Elektrodenstruktur 16 mittels einer Federstruktur 18 (nicht gezeigt in Bei dem MEMS-Aktuator-Element 10 sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 hinsichtlich einer Draufsicht, z.B. in einem lateralen Abstand x0, gegenüberstehend ausgebildet und in der minimalen Auslenkposition zMIN vertikal, z.B. in einem vertikalen Abstand z0, voneinander beabstandet sind. Bezüglich der geometrischen Abmessungen der ersten und zweiten Elektrodenstruktur 14, 16 wird auf die Ausführungen zu Die Federstruktur (nicht gezeigt in Wie in In diesem Fall wird beispielsweise auch von einem "Kammantrieb" (engl. comb drive), der durch die erste und zweite Elektrodenstruktur 14, 16 gebildet ist, gesprochen. In diesem Zusammenhang wird aber darauf hingewiesen, dass der Begriff "Kammantrieb" nicht einschränkend zu verstehen ist, da auch für die erste und/oder zweite Elektrodenstruktur 14, 16 auch nur mit wenigen Finger- oder Kammelementen 14-2, 16-2 eingesetzt werden können. Ferner können gemäß dem vorliegenden Funktionsprinzip die erste und/oder zweite Elektrodenstruktur 14, 16 als Kantenelemente ohne Finger- oder Kammelemente eingesetzt werden, wobei die erste und zweite Elektrodenstruktur 14, 16 gleichermaßen nach den hier beschriebenen Grundlagen funktionieren. So kann beispielsweise die erste Elektrodenstruktur 14 in einer Draufsicht (parallel zur x-y-Ebene) als eine umlaufende Kantenstruktur 14-1 zu der zweiten Elektrodenstruktur 16 ausgebildet sein. Allgemein kann dann auch von einem elektrostatischen Kantenaktuator-Element gesprochen werden, da die Aktuatorkraft proportional zu der Länge der sich gegenüberstehenden Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 ist. So sind in Wie in In der minimalen Auslenkposition zMIN sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 vertikal (= parallel zur z-Richtung) in einem Abstand z0 voneinander beabstandet sind, wobei in der maximalen Auslenkposition zMAX das Fingerelement 16-2 der zweiten Elektrodenstruktur 16 vertikal zwischen zwei Fingerelemente 14-2 der ersten Elektrodenstruktur "eingetaucht" ist. Wie in Ein minimaler Hebelarm HMIN der zweiten Elektrodenstruktur 16 erstreckt sich ausgehend von Drehachse D der zweiten Elektrodenstruktur 16 bis zu dem Anfangspunkt B1 des lateralen Fingerüberdeckungsbereichs B. Ein mittlerer Hebelarm HMIT der zweiten Elektrodenstruktur 16 erstreckt sich ausgehend von Drehachse D der zweiten Elektrodenstruktur 16 bis zu dem Mittenpunkt B2 des lateralen Fingerüberdeckungsbereichs B. Ein maximaler Hebelarm HMAX der zweiten Elektrodenstruktur 16 erstreckt sich ausgehend von Drehachse D der zweiten Elektrodenstruktur 16 bis zu dem Anfangspunkt B1 des lateralen Fingerüberdeckungsbereichs B. So ergibt sich in der maximalen Auslenkposition zMAX ein minimaler vertikaler Eintauchweg zE1 am dem Anfangspunkt B1 des lateralen Fingerüberdeckungsbereichs B, ein mittlerer vertikaler Eintauchweg zE an dem Mittenpunkt B2 des lateralen Fingerüberdeckungsbereichs B, und ein maximaler vertikaler Eintauchweg zE2 am dem Endpunkt B3 des lateralen Fingerüberdeckungsbereichs B. Gemäß einem Ausführungsbeispiel entspricht der mittlere vertikale Eintauchweg zE von Gemäß einem Ausführungsbeispiel entspricht ferner der "mittlere" Auslenkungsweg zS an dem Mittenpunkt B2 des lateralen Fingerüberdeckungsbereichs B dem maximalen Auslenkungsweg bzw. Stroke zS der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 gemäß den vorherigen Ausführungsbeispielen. Bei dem MEMS-Aktuator-Element 10 beträgt in der maximalen Auslenkposition zMAX der vertikale Eintauchweg "zE" (oder Überlapp) der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zS, d.h. zE ≤ 0,5 zS. Die Wegstrecke zwischen der minimalen Auslenkungsposition zMIN und der maximalen Eintauchposition zMAX wird als maximaler Auslenkungsweg bzw. Stroke zS bezeichnet, und erstreckt sich entlang der Auslenkungspositionen bzw. Auslenkungszwischenpositionen z1. Bei dem MEMS-Aktuator-Element 10 sind die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 hinsichtlich einer Draufsicht in einem lateralen Abstand x0 gegenüberstehend ausgebildet. Gemäß einem Ausführungsbeispiel kann der vertikale Eintauchweg zE ferner zwischen dem 0,1- und 0,4-fachen oder zwischen dem 0,2- und dem 0,3-fachen des maximalen Auslenkungswegs zS betragen. Gemäß der Erfindung sind die erste und zweite Elektrodenstruktur 14, 16 ausgebildet, um basierend auf einer elektrischen Ansteuerspannung VS die zweite Elektrodenstruktur 16 in die Zwischenposition z1 zwischen der minimalen Auslenkungsposition zMIN und der maximalen Auslenkungsposition zMAX elektrostatisch auszulenken. Dabei bewirkt ein Minimalwert der Ansteuerspannung VS eine Positionierung oder Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die minimale Auslenkungsposition zMIN und ein Maximalwert der Ansteuerspannung VS eine Auslenkung der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die maximale Auslenkungsposition zMAX. Der Ansteuerspannungsbereich (= Adressspannungsbereich) liegt zwischen der minimalen Wert der Ansteuerspannung VS und dem maximalen Wert der Ansteuerspannung VS. Ferner bewirkt eine Änderung der Ansteuerspannung Vs in einen Spannungswert zwischen der minimalen Ansteuerspannung VS_MIN und der maximalen Ansteuerspannung VS_MAX eine entsprechende Änderung der Zwischenposition z, der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 zwischen deren minimaler und maximaler Auslenkungsposition zMIN und zMAX. Gemäß der Erfindung ist das MEMS-Aktuator-Element 10 ferner ausgelegt, so dass die erste und zweite Elektrodenstruktur 14, 16 in einer Ebene parallel zu dem Substrat 12 um einen lateralen Mindestabstand x0 beabstandet sind, wobei der laterale Mindestabstand x0 das 0,5- bis 1,5-fache oder das 0,6- bis 1-fache des maximalen Auslenkungswegs zS beträgt. Gemäß der Erfindung ist das MEMS-Aktuator-Element 10 ferner ausgelegt, so dass die vertikale Dicke d14, d der ersten und/oder zweiten Elektrodenstruktur 14, 16 das 0,6- bis 1,2-fache oder das 0,8- bis 1,0-fache des maximalen Auslenkungswegs zS beträgt. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 ferner ausgelegt sein, so dass die minimale Ansteuerspannung als eine Biasspannung UBIAS bereitgestellt wird, wobei die elektrische Ansteuerspannung VS die Biasspannung UBIAS und die Betriebsspannung (Adressspannung) VBETRIEB aufweist, wobei die Biasspannung VBIAS in einem Bereich zwischen dem 0,5-fachen bis 2-fachen oder dem 0,8-fachen bis 1,5-fachen des Betriebsspannungsbereichs liegen kann. Bei Kammantrieben bzw. Kantenantrieben gemäß den beschriebenen Ausführungsbeispielen kann das elektrostatische Feld durch den relativ geringen Elektrodenabstand räumlich eng im Bereich der Elektrodenfinger 14-2, 16-2 begrenzt werden. Dadurch können relative hohe Aktuatorkräfte selbst bei der fertigungsbedingten Minimalgröße der Elektrodenstrukturen 14, 16 mit nur einigen wenigen Fingerelementen 14-2, 16-2 erreicht werden. Dazu erlaubt der beschriebene Kamm- bzw. Kantenantrieb ein geringes Übersprechen zwischen benachbarten Aktuatoren 10. Gemäß einem Ausführungsbeispiel kann das MEMS-Aktuator-Element 10 eine dritte Elektrodenstruktur 24 aufweisen, die bezüglich des Substrats 12 feststehend und in der gleichen Ebene (parallel zur x-y-Ebene) wie die erste Elektrodenstruktur 14 angeordnet ist. Die zweite Elektrodenstruktur 16 erstreckt sich bei dem Ausführungsbeispiel von Die zweite Elektrodenstruktur 16 ist lateral (z.B. symmetrisch) zwischen der ersten und dritten Elektrodenstruktur 14, 24 angeordnet und auslenkbar. Dabei ist die zweite Elektrodenstruktur 16 mittels der ersten und dritten Elektrodenstruktur 14, 24 elektrostatisch von der minimalen Auslenkungsposition (= Ruheposition) zMIN in eine vertikal beabstandete, weitere maximale Auslenkungsposition (= ober maximale Auslenkungsposition) zMAX' bewegbar. Die in Bezüglich der geometrischen Anordnung der ersten und zweiten Elektrodenstruktur 14, 16 von Die gestrichelte Darstellung der zweiten Elektrodenstruktur 16 gibt beispielsweise eine minimale Auslenkungsposition (Grundposition) zMIN der zweiten Elektrodenstruktur 16 wieder, während der durchgehend gezeichnete Umriss der zweiten Elektrodenstruktur 16 die maximale Auslenkposition zMAX der zweiten Elektrodenstruktur 16 darstellt, wobei in Die geometrischen und elektrischen Designparameter für das MEMS-Aktuator-Element 10 von Im Folgenden werden nochmals einige wesentliche technische Effekte des MEMS-Aktuator-Elements 100 zusammengefasst. Das vorliegende erfindungsgemäße Konzept ermöglicht es, MEMS-Aktuator-Elemente 10 (= mikromechanische elektrostatische Aktuatoren) 10 mit großem Auslenkungsbereich bei kleinen lateralen Abmessungen zu realisieren, die gegenüber den üblichen Plattenaktuatoren ein sehr geringes Übersprechen zwischen Nachbarpixeln sowie eine verbesserte Linearität der Kennlinie zeigen. Das vorliegende erfindungsgemäße Konzept eignet sich für mikromechanische Aktuatoren, insbesondere für phasenschiebende SLMs (SLM = Spatial Light Modulator, ein "Array" zur Modulation eines Laserstrahls) mit sehr kleinen Pixeln (gemessen an den herstellbaren mechanischen Strukturgrößen oder der gewünschten Auslenkung). Solche SLMs sind besonders für die digitale Holografie interessant, sowohl für zukünftige holografische Displays, wie auch für (etwas näher liegende) Anwendungen wie z.B. universelle Laserpinzetten, Wellenfrontmodellierung und schnelle optische Schalter für Glasfasernetze, wo solche SLMs die gleichzeitige Aufspaltung sowie Steuerung der Richtung, Divergenz und Intensität von Laserstrahlen ermöglichen. Aber auch die Verwendung in anderen Geräten zur Mustererzeugung oder Steuerung der Lichtverteilung erscheint sinnvoll. Darüber hinaus sind vielfältige andere Anwendungen in der Mikroaktuatorik (auch ohne Mikrospiegel) wie auch der Sensorik denkbar. Das vorliegende erfindungsgemäße Konzept eignet sich auch für MEMS-Aktuatoren 10, bei denen mehr als zwei Stufen der Auslenkung dadurch erreicht werden, dass mehrere Elektroden jeweils unabhängig voneinander mit einem binären Spannungswert adressiert werden. Zum Beispiel können der beweglichen Elektrode (auf festem elektrischem Potenzial, Biasspannung) 4 elektrisch getrennte, feste Elektroden gegenüberstehen, die jeweils an einer SRAM-Speicherzelle der Adresselektronik angeschlossen sind. Jede SRAM-Zelle kann jeweils nur einen von zwei Zuständen annehmen und die angeschlossene Elektrode mit einer von zwei Spannungen beaufschlagen. Wenn die 4 Elektroden durch unterschiedliche Kantenlängen (Fingerzahlen) unterschiedlich starke Kräfte erzeugen, können so mit einer rein digitalen Ansteuerung im Beispiel bis zu 16 Stufen im analogen Auslenkungsbereich des Aktuators angesteuert werden, d.h. ohne einen pull-in und ohne mechanische Anschläge. In diesem Fall kann durch die relativ gute Linearität der Kennlinie dieser Erfindung eine deutliche Verbesserung der Abstufung der Auslenkungszustände gegenüber einem Plattenaktuator mit mehreren Elektroden erreicht werden. Entsprechendes ginge grundsätzlich auch mit einer festen und mehreren beweglichen Elektroden. Die vorliegende Erfindung kann sehr gut mit Federn entsprechend des Patents oder noch besser der Anmeldung kombiniert werden. Gemäß einem Ausführungsbeispiel umfasst das MEMS-Aktuator-Array 100 eine Mehrzahl von MEMS-Aktuator-Elementen 10 und ferner einer Ansteuereinrichtung 22 zum Bereitstellen einer eigenen Ansteuerspannung zwischen der ersten und zweiten Elektrodenstruktur 14, 16 der jeweiligen MEMS-Aktuator-Elemente 10. Die Ansteuereinrichtung 22 ist beispielsweise ausgebildet , um jedes einzelne oder unterschiedliche Gruppen der MEMS-Aktuator-Elemente 10 mit einer eigenen Ansteuerspannung VS zu versehen. Gemäß einem Ausführungsbeispiel kann zumindest eine Teilmenge der MEMS-Aktuator-Elemente 10 oder können auch alle MEMS-Aktuator-Elemente 10 eine gemeinsame erste Elektrodenstruktur 14 aufweist, die bezüglich des Substrats 12 feststehend angeordnet ist. Gemäß einem Ausführungsbeispiel kann zumindest eine Teilmenge der MEMS-Aktuator-Elemente 10 oder können auch alle MEMS-Aktuator-Elemente 10 eine gemeinsame dritte Elektrodenstruktur aufweist, die bezüglich des Substrats feststehend angeordnet ist, wobei die Ansteuereinrichtung 22 ferner ausgebildet ist, um eine weitere eigene Ansteuerspannung zwischen der zweiten und dritten Elektrodenstruktur 14, 24 der jeweiligen MEMS-Aktuator-Elemente 10 bereitzustellen. Gemäß einem Ausführungsbeispiel können die MEMS-Aktuator-Elemente 10 Mikrospiegelelemente 20 aufweisen, die jeweils mit einer der zweiten Elektrodenstrukturen 16 gekoppelt sind, wobei die Mikrospiegelelemente 20 entsprechend der Auslenkung der zugeordneten zweiten Elektrodenstruktur 16 auslenkbar sind. Gemäß einem Ausführungsbeispiel sind die zweiten Elektrodenstrukturen 16 der MEMS-Aktuator-Elemente 10 basierend auf der Ansteuerspannung Vs in zumindest eine Zwischenposition z1 jeweils zwischen der minimalen und maximalen Auslenkungsposition zMIN, zMAX und/oder basierend auf der weiteren Ansteuerspannung V'S in zumindest eine weitere Zwischenposition z'1 jeweils zwischen der minimalen Auslenkungsposition zMIN und weiteren maximalen Auslenkungsposition z'MAX auslenkbar. Gemäß einem Ausführungsbeispiel weisen die Ansteuerspannung Vs und/oder die weitere Ansteuerspannung V'S eine jeweilige Adressspannung VBETRIEB, V'BETRIEB für die MEMS-Aktuator-Elemente 10 und ferner eine jeweilige Bias-Spannung VBIAS, V'BIAS für die MEMS-Aktuator-Elemente 10 auf, wobei die Bias-Spannung VBIAS, V'BIAS in einem Bereich zwischen dem 0,5-fachen und 2-fachen, oder zwischen dem 0,8-fachen und 1,5-fachen eines Maximalwerts der Adressspannung VBETRIEB, V'BETRIEB liegt. Gemäß einem Ausführungsbeispiel weist das MEMS-Aktuator-Array 100 ferner einer CMOS-Backplane als das Substrat 12 auf, wobei die CMOS-Backplane die Ansteuereinrichtung 22 und ferner Speicherzellen 23 aufweist. Gemäß einem Ausführungsbeispiel weist das MEMS-Aktuator-Array 100 zumindest 10.000 MEMS-Aktuator-Elemente 10 in einer nxm-Anordnung, mit n Zeilen und m Spalten, auf. Gemäß einem Ausführungsbeispiel weisen die MEMS-Aktuator-Elemente 10 des MEMS-Aktuator-Arrays 100 einen Pitch P von kleiner oder gleich 20µm oder 10µm auf. Gemäß einem Ausführungsbeispiel weisen die MEMS-Aktuator-Elemente 10 des MEMS-Aktuator-Arrays 100 einen Pitch P zwischen 5µm und 20µm auf. Gemäß einem Ausführungsbeispiel umfasst also das MEMS-Aktuator-Array 100 eine Mehrzahl von MEMS-Aktuator-Elementen 10, wobei die MEMS-Aktuator-Elemente 10 ein Substrat 12, eine erste Elektrodenstruktur 14 mit einer Kantenstruktur 14-1, die bezüglich des Substrats 12 feststehend angeordnet ist, und eine zweite Elektrodenstruktur 16 mit einer Kantenstruktur 16-1. Die zweite Elektrodenstruktur 16 ist mittels einer Federstruktur 18 auslenkbar mit dem Substrat 12 gekoppelt und ist mittels der ersten Elektrodenstruktur 14 elektrostatisch auslenkbar, um die Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in eine Zwischenposition z1 zwischen einer minimalen Auslenkungsposition zMIN und einer vertikal beabstandeten maximalen Auslenkungsposition zMAX zu bewegen, wobei die minimale und maximale Auslenkungsposition zMIN, zMAX einen maximalen Auslenkungswegs zS vorgeben. Die Kantenstrukturen 14-1, 16-1 der ersten und zweiten Elektrodenstruktur 14, 16 sind hinsichtlich einer Draufsicht gegenüberstehend ausgebildet und in der minimalen Auslenkposition zMIN vertikal voneinander beabstandet. In der maximalen Auslenkposition zMAX beträgt der vertikale Eintauchweg zE der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 in die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 bis zu dem 0,5-fachen des maximalen Auslenkungswegs zs, mit zE ≤ 0,5 Zs. Die erste und zweite Elektrodenstruktur 14, 16 sind in einer Ebene parallel zu dem Substrat 12 um einen lateralen Mindestabstand (= um einen mittleren bzw. effektiven lateralen Abstand) x0 beabstandet sind, wobei der laterale Mindestabstand x0 das 0,5- bis 1,5-fache oder das 0,6- bis 1-fache des maximalen Auslenkungswegs zS beträgt. Die vertikale Dicke (= mittlere bzw. effektive vertikale Dicke) d14, d16 der ersten und/oder zweiten Elektrodenstruktur 14, 16 beträgt das 0,6- bis 1,2-fache oder das 0,8- bis 1,0-fache des maximalen Auslenkungswegs zS. Die MEMS-Aktuator-Elemente 10 weisen einen Pitch P von kleiner oder gleich 20µm auf. Das MEMS-Aktuator-Array 100 umfasst ferner eine Ansteuereinrichtung 22 zum Bereitstellen einer eigenen Ansteuerspannung VS zwischen der ersten und zweiten Elektrodenstruktur 14, 16 der jeweiligen MEMS-Aktuator-Elemente 10. Gemäß einem Ausführungsbeispiel beträgt in der maximalen Auslenkungsposition zMAX der vertikale Eintauchweg zE der Kantenstruktur 16-1 der zweiten Elektrodenstruktur 16 bezüglich die Kantenstruktur 14-1 der ersten Elektrodenstruktur 14 zwischen dem 0,1- und 0,4-fachen oder zwischen dem 0,2- und dem 0,3-fachen des maximalen Auslenkungswegs zS. Basierend auf den obigen Designparametern für das MEMS-Aktuator-Element kann nun die für die jeweilige Anwendung gewünschte bzw. geforderte maximale Auslenkung zS (Stroke) eingestellt werden, wobei für diese durch die Anwendung geforderte bzw. vorgegebene Größe der maximalen Auslenkung ein MEMS-Aktuator-Element mit für den jeweiligen Anwendungsfall optimierten (= minimalen) Abmessungen (Pitch), einer optimierten (= minimalen) Antriebsspannung, einer linearen Kennlinie und einem geringen Übersprechen zu benachbarten MEMS-Aktuator-Elementen erhalten werden kann. Obwohl einige Aspekte der vorliegenden Offenbarung als Merkmale im Zusammenhang einer Vorrichtung beschrieben wurden, ist es klar, dass eine solche Beschreibung ebenfalls als eine Beschreibung entsprechender Verfahrensmerkmale betrachtet werden kann. Obwohl einige Aspekte als Merkmale im Zusammenhang mit einem Verfahren beschrieben wurden, ist klar, dass eine solche Beschreibung auch als eine Beschreibung entsprechender Merkmale einer Vorrichtung bzw. der Funktionalität einer Vorrichtung betrachtet werden können. In der vorhergehenden detaillierten Beschreibung wurden teilweise verschiedene Merkmale in Beispielen zusammen gruppiert, um die Offenbarung zu rationalisieren. Diese Art der Offenbarung soll nicht als die Absicht interpretiert werden, dass die beanspruchten Beispiele mehr Merkmale aufweisen als ausdrücklich in jedem Anspruch angegeben sind. Vielmehr kann, wie die folgenden Ansprüche wiedergeben, der Gegenstand in weniger als allen Merkmalen eines einzelnen offenbarten Beispiels liegen. Folglich werden die folgenden Ansprüche hiermit in die detaillierte Beschreibung aufgenommen, wobei jeder Anspruch als ein eigenes separates Beispiel stehen kann. Während jeder Anspruch als ein eigenes separates Beispiel stehen kann, sei angemerkt, dass, obwohl sich abhängige Ansprüche in den Ansprüchen auf eine spezifische Kombination mit einem oder mehreren anderen Ansprüchen zurückbeziehen, andere Beispiele auch eine Kombination von abhängigen Ansprüchen mit dem Gegenstand jedes anderen abhängigen Anspruchs oder einer Kombination jedes Merkmals mit anderen abhängigen oder unabhängigen Ansprüchen umfassen. Solche Kombinationen seien umfasst, es sei denn es ist ausgeführt, dass eine spezifische Kombination nicht beabsichtigt ist. Ferner ist beabsichtigt, dass auch eine Kombination von Merkmalen eines Anspruchs mit jedem anderen unabhängigen Anspruch umfasst ist, selbst wenn dieser Anspruch nicht direkt abhängig von dem unabhängigen Anspruch ist. Obwohl spezifische Ausführungsbeispiele hierin dargestellt und beschrieben wurden, wird einem Fachmann offensichtlich sein, dass eine Vielzahl von alternativen und/oder äquivalenten Implementierungen für die spezifischen dort gezeigten und dargestellten Ausführungsbeispiele ersetzt werden können, ohne von dem Gegenstand der vorliegenden Anmeldung abzuweichen. Dieser Anmeldungstext soll alle Adaptionen und Variationen der hierin beschriebenen und erörterten spezifischen Ausführungsbeispiele abdecken. Daher ist der vorliegende Anmeldungsgegenstand lediglich durch den Wortlaut der Ansprüche begrenzt. MEMS actuator element (10), comprising:
a substrate (12), a first electrode structure (14) with an edge structure (14-1) that is stationary with respect to the substrate (12), a second electrode structure (16) with an edge structure (16-1), wherein the second electrode structure (16) is deflectably coupled to the substrate (12) by means of a spring structure (18) and electrostatically deflectable by means of an control voltage (VS) between the first and second electrode structures (14, 16) to move the edge structure (16-1) of the second electrode structure (16) into an intermediate position (z1) between a minimum deflection position (zMIN) and a vertically spaced-apart maximum deflection position (zMAX), wherein the minimum and maximum deflection positions (zMIN, zMAX)specify a maximum deflection path (zS), wherein the edge structures (14-1, 16-1) of the first and second electrode structures (14, 16) are configured to be opposite to each other with respect to a top view and are vertically spaced apart in the minimum deflection position (zMIN) and wherein the first and second electrode structures (14, 16) are spaced apart by a lateral minimum distance (x0) in a plane parallel to the substrate (12), wherein the vertical direction is perpendicular to the substrate plane, characterized in that the lateral minimum distance (x0) is 0.5 to 1.5 times or 0.6 to 1 times the maximum deflection path (zs), and wherein the vertical thickness (d14, d16) of the first and/or second electrode structure (14, 16) is 0.6 to 1.2 times or 0.8 to 1.0 times the maximum deflection path (zS), and in the maximum deflection position (zMAX), the vertical immersion path (zE) of the edge structure (16-1) of the second electrode structure (16) into the edge structure (14-1) of the first electrode structure (14) is up to 0.5 times the maximum deflection path zs, with zE ≤ 0,5 zS, and the MEMS actuator element (10) comprises control means (22) configured for providing a control voltage (VS) limited by a minimum control voltage (VS_MIN) and a maximum control voltage (VS_MAX) between the first and second electrode structures (14, 16) to electrostatically deflect the second electrode structure (16) into the intermediate position (z1) between the minimum deflection position (zMIN) and the maximum deflection position (zMAX) based on the electric control voltage (VS), wherein the minimum control voltage (VS_MIN) effects deflection of the edge structure (16-1) of the second electrode structure (16) into the minimum deflection position (zMIN) and the maximum control voltage (VS_MAX) effects deflection into the maximum deflection position (zMAX). MEMS actuator element (10) according to claim 1, wherein a change of the control voltage (VS) into an intermediate voltage between the minimum control voltage and the maximum control voltage effects a respective change of the intermediate position (z1) of the edge structure (16-1) of the second electrode structure (16) between the minimum deflection position (zMIN) and the maximum deflection position (ZMAX). MEMS actuator element (10) according to one of the preceding claims, wherein, in the maximum deflection position (zMAX), the vertical immersion path (zE) of the edge structure (16-1) of the second electrode structure (16) with respect to the edge structure (14-1) of the first electrode structure (14) is between 0.1 and 0.4 times or between 0.2 and 0.3 times the maximum deflection path (zS). MEMS actuator element (10) according to one of the preceding claims, wherein the minimum control voltage (VS_MIN) is provided as bias voltage (VBIAS), and wherein the electric control voltage (Vs) comprises the bias voltage (VBIAS) and an operating voltage (VOPERATION), wherein the bias voltage (VBIAS) is in a range between 0.5 times to 2 times or 0.8 times to 1.5 times the operating voltage range. MEMS actuator element (10) according to one of the preceding claims, wherein the second electrode structure (16) is deflectable in a translatory and/or rotatory manner with respect to the first electrode structure (14). MEMS actuator element (10) according to one of the preceding claims, wherein the edge structure (16-1) of the second electrode structure (16) is configured to engage the edge structure (14-1) of the first electrode structure (14) with respect to a top view, wherein the edge structure (14-1) of the first electrode structure (14) comprises a finger or comb structure (14-2) and wherein the edge structure (16-1) of the second electrode structure (16) comprises a further finger or comb structure (16-2). MEMS actuator element (10) according to one of the preceding claims, further comprising: MEMS actuator array (100), comprising:
a plurality of MEMS actuator elements (10) according to one of the preceding claims wherein the control means (22) is configured for providing an individual control voltage (VS) between the first and second electrode structures (14, 16) of the respective MEMS actuator elements (10). MEMS actuator array (100) according to claim 8, wherein at least a subset or all MEMS actuator elements (10) comprise a common first electrode structure (14) that is stationary with respect to the substrate (12). MEMS actuator array (100) according to claim 8 or 9, wherein at least a subset or all MEMS actuator elements (10) comprise a common third electrode structure (24) that is stationary with respect to the substrate (12) and MEMS actuator array (100) according to one of claims 8 to 10, wherein the MEMS actuator elements (10) comprise micromirror elements (20) that are each coupled to one of the second electrode structures (16), wherein the micromirror elements (20) are deflectable according to the deflection of the second electrode structure (16). MEMS actuator array (100) according to one of claims 8 to 11, wherein the second electrode structures (16) of the MEMS actuator elements (10) are deflectable into at least one intermediate position (z1) each between the minimum and maximum deflection position (zMIN, zMAX), based on the control voltage (Vs) and/or into at least an intermediate position (z1), each between the minimum deflection position (zMIN) and further maximum deflection position (z'MAX), based on the further control voltage (V's). MEMS actuator array (100) according to one of claims 8 to 12, comprising: MEMS actuator array (100) according to one of claims 8 to 13, wherein the MEMS actuator array (100) comprises at least 10,000 MEMS actuator elements (10). MEMS actuator array (100) according to one of claims 8 to 14, wherein the MEMS actuator elements (10) comprise a pitch (P) of less than or equal to 20µm.Literatur
a third electrode structure (24) that is stationary with respect to the substrate (12), wherein the second electrode structure (16) is arranged between the first and third electrode structures (14, 24) and is deflectable, wherein the second electrode structure (16) is electrostatically moveable from the minimum deflection position (zMIN) into a vertically spaced-apart further maximum deflection position (z'MAX) by means of the first and third electrode structures (14, 24).
wherein the control means (22) is further configured to provide a further control voltage (V's) between the second and third electrode structures (16, 24).
a CMOS backplane (12) as the substrate (12), wherein the CMOS backplane (12) comprises the control means (22) and further memory cells (23).

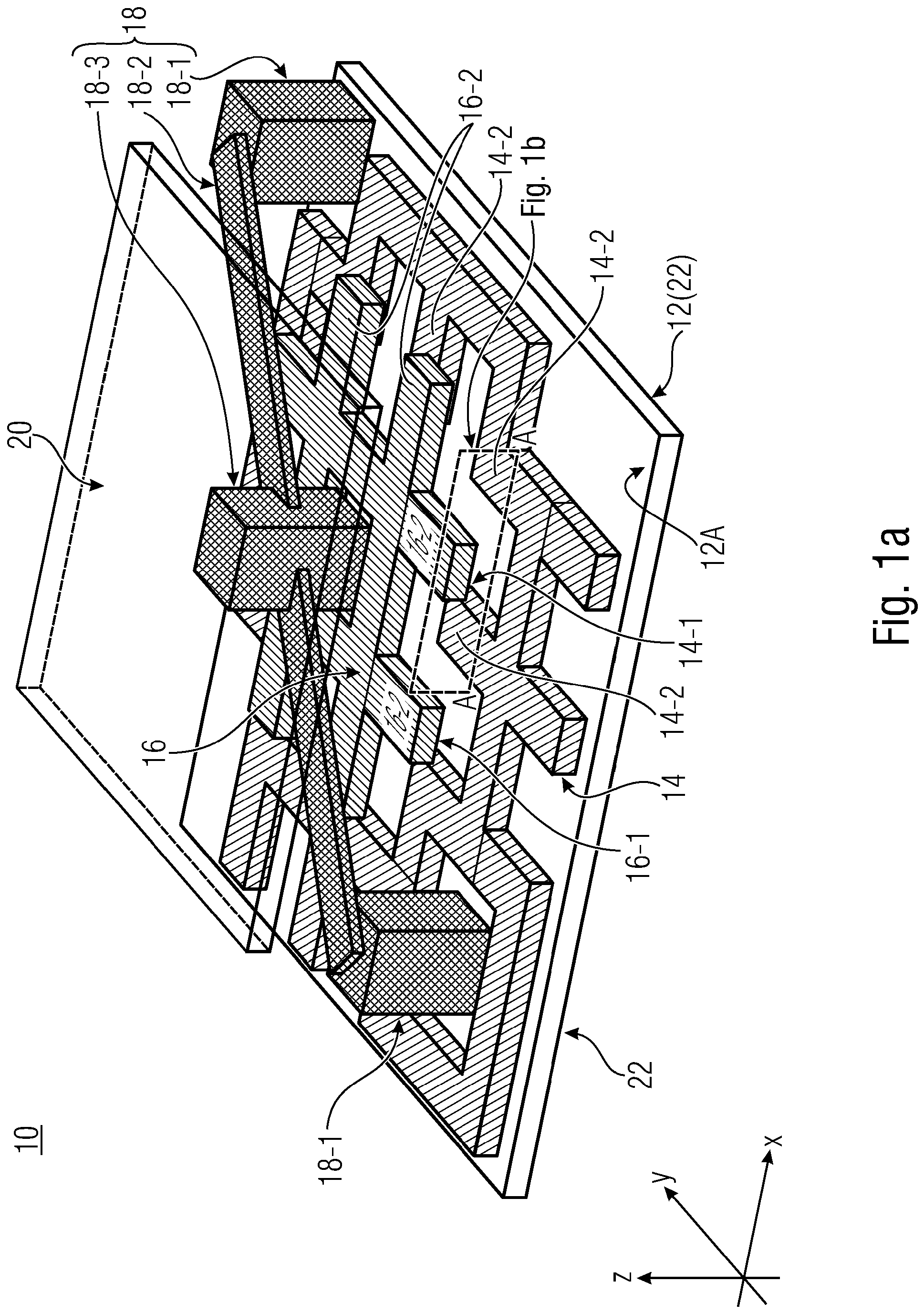
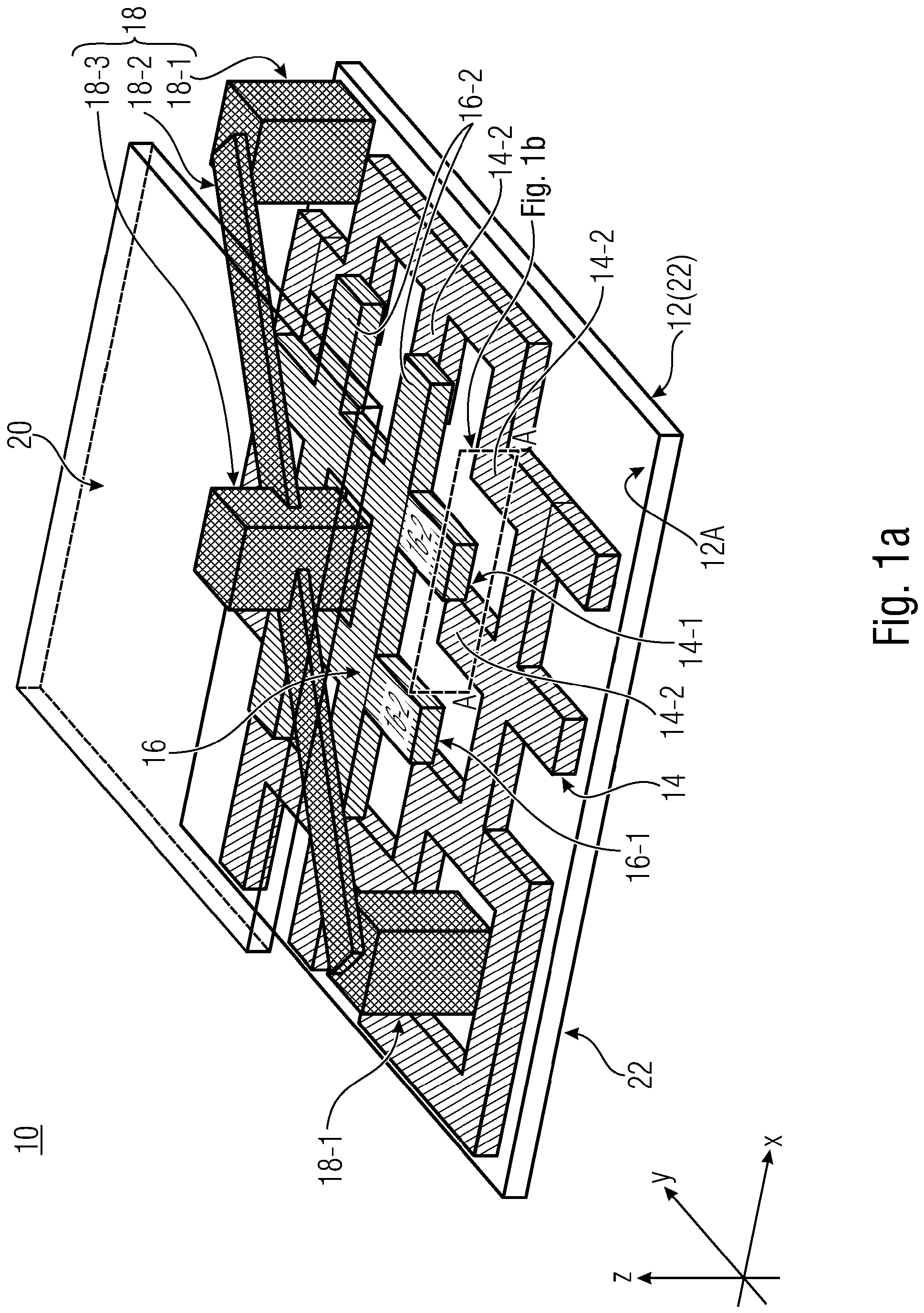




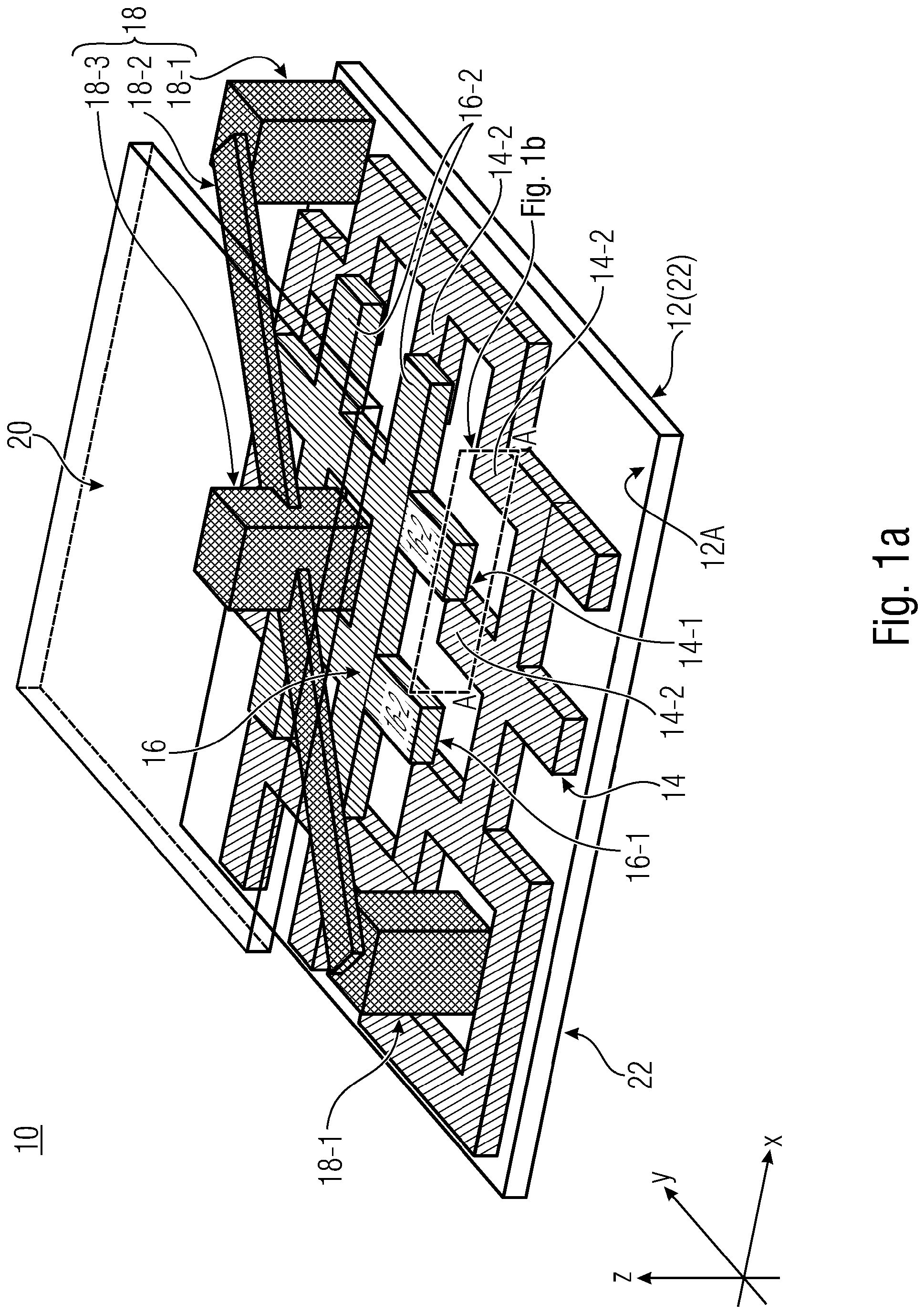




CPC - классификация
BB8B81B81BB81B2B81B22B81B220B81B2201B81B2201/B81B2201/0B81B2201/03B81B2201/033B81B2201/04B81B2201/042B81B2203B81B2203/B81B2203/0B81B2203/04B81B2203/05B81B2203/053B81B2203/058B81B2207B81B2207/B81B2207/0B81B2207/05B81B2207/053B81B3B81B3/B81B3/0B81B3/00B81B3/002B81B3/0021B81B3/0027GG0G02G02BG02B2G02B26G02B26/G02B26/0G02B26/08G02B26/084G02B26/0841IPC - классификация
BB8B81B81BB81B3B81B3/B81B3/0B81B3/00GG0G02G02BG02B2G02B26G02B26/G02B26/0G02B26/00G02B26/001G02B26/08G02B26/084G02B26/0841HH0H01H01HH01H5H01H53H01H53/H01H53/0H01H53/06Цитирование НПИ
HAH D ET AL: "Low-Voltage, Large-Scan Angle MEMS Analog Micromirror Arrays With Hidden Vertical Comb-Drive Actuators", JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, IEEE SERVICE CENTER, US, Bd. 13, Nr. 2, 1. April 2004 (2004-04-01), Seiten 279-289, XP011110390, ISSN: 1057-7157, DOI: 10.1109/JMEMS.2004.825314US-A1- 2006 119 216